2.1. Unipolar Optical Digital Modulation Schemes
Because the average optical power of LIDAR is constrained, it is useful to determine a modulation scheme that can provide the requisite bandwidth and use power efficiently. The unipolar optical digital modulation scheme converts a symbol to a digital data stream that is composed of pulses and empty slots. The symbol is represented as a bit sequence called a block and the size of the block is the number of bits. Many digital modulation schemes have been proposed for use in optical wireless communication systems. Given the requirements, the performance of a communication system depends on how the information is represented in the modulation scheme. The types of modulation are thus the critical determinants of the system design. In digital modulation schemes, information is embedded in both mark and space slots, which are generated in terms of a fixed time slot. Each discrete amplitude of a modulated signal appears by varying the characteristics of the pulse at a discrete time. Time characteristics such as pulse position, width, and spacing are modulated using the instantaneous modulation signal, but a constant sampling frequency is sustained. The OOK provides higher bandwidth efficiency, but poor optical power performance. Digital pulse time modulation (DPTM) techniques such as PPM, DPPM, MPPM, DPIM, and DH-PIM are recognized as block codes through the OOK, which provides a balance between bandwidth and optical power efficiency [
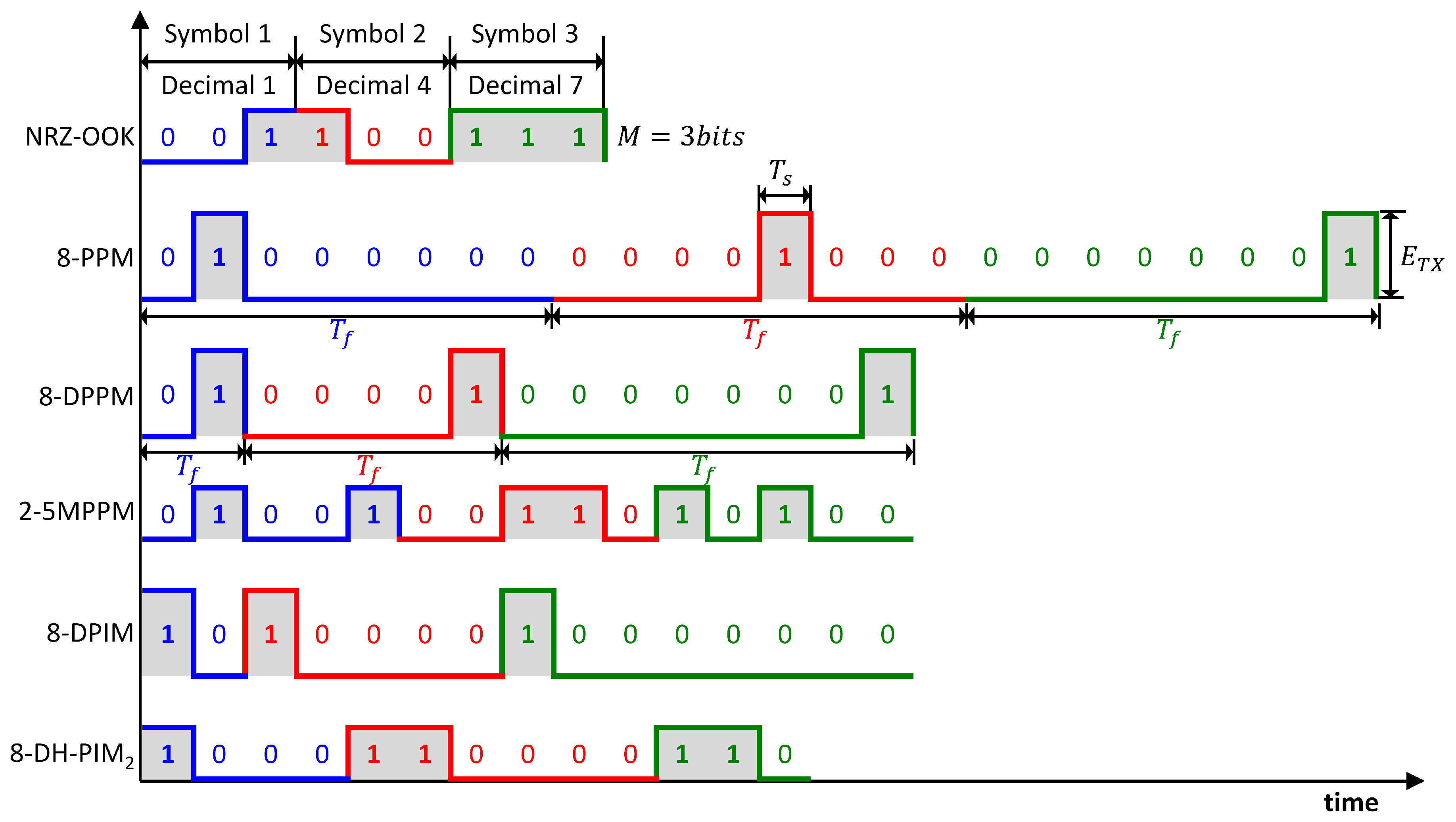
31]. Digital modulation schemes can be divided into two main categories: Isochronous and anisochronous. In an isochronous mode, the length of the symbol is fixed. In the anisochronous mode, the length of the symbol is variable. The OOK, PPM, and MPPM are isochronous, whereas the DPPM, DPIM, and DH-PIM are anisochronous. An illustration of the overall conversion method and the time waveforms of modulation techniques with fixed pulse width (
) and fixed time slot rate (
) that are discussed—the OOK, PPM, DPPM, MPPM, DPIM, and DH-PIM—are shown in
Figure 2.
M is the size of the input block,
is the pulse peak power,
is the block duration,
is the time slot duration,
is the time slot rate, and
is the maximum number of time slots.
OOK is the predominant pulse modulation format in optical wireless communication systems. It uses the simple method of amplitude-shift keying (ASK) modulation that represents digital data depending on the presence of an optical pulse [
31,
40,
41,
42]. In its simplest form, the presence of a pulse for a particular bit duration is represented by ‘1’, and its absence for the same bit duration is represented by ‘0’. OOK can either be return to zero (RZ) or non-return to zero (NRZ). In NRZ–OOK, the pulses fill the entire bit duration; and in RZ–OOK, they occupy a particular portion of the bit duration. Owing to the relatively wide pulse, NRZ–OOK has higher bandwidth efficiency, but lower power efficiency than RZ–OOK. In the OOK, symbols are displayed as amplitude pulse groups. A combination of an
M-bit input block with symbols for on or off can represent
unique combinations. Three significant advantages of the OOK are that it provides a high SNR, low distortion performance, and superior system linearity.
In PPM, each bit of an
M-bit input block is mapped to one of
possible symbols [
31,
40,
41,
42,
43,
44]. A frame consists of a pulse that occupies a slot, and the remaining slots have no pulse. Therefore, the information is displayed as a pulse position within the same symbol as the decimal value of the
M-bit input block. Because PPM requires both slot and symbol synchronization at the receiver to demodulate the signal, it delivers impressive optical power performance, but at the cost of bandwidth and circuit simplicity.
In DPPM, an
M-bit input block maps to one of
unique DPPM symbols, including
empty slots and a pulse [
40,
41,
42,
44,
45,
46]. The DPPM symbol is derived from the corresponding PPM symbol by removing all empty slots following the pulse, thus reducing the average symbol length and increasing bandwidth efficiency. DPPM indicates its own symbol synchronization when all symbols end with a pulse. For a long sequence of zeros, there may be a slot synchronization problem that can be handled using a guard slot (GS) immediately after the pulse is removed. The DPPM improves bandwidth and power efficiency over the PPM for a fixed average bit rate and fixed available bandwidth.
As the level of coding increases, the number of PPM slots and the required transmission bandwidth both increase exponentially. To overcome these limitations, MPPM was introduced as a way to improve the bandwidth utilization of PPM. MPPM is a generalization of PPM that allows more than one pulse per symbol. Moreover,
w-pulse
n-slot MPPM has
unique symbols that correspond to filling
n slots with
w pulses in a frame [
40,
42,
43,
44,
47,
48,
49,
50,
51,
52]. This approach reduces the bandwidth to half of that in the traditional PPM at the same transmission efficiency. That is, a single frame can carry information of size
bits. By contrast, for PPM, this rate is
bits. The amount of information that the MPPM can transfer increases with the number of pulses in the fixed-length frame. The disadvantage is that if one or more of these pulses are erroneous, the frame is incorrectly demodulated. Therefore, too many source bits are affected. MPPM provides half the information capacity of the PPM, and is inferior to it in terms of error performance.
DPIM has built-in symbol synchronization that improves bandwidth efficiency and data speed compared to PPM and power efficiency compared to OOK [
31,
40,
41,
42,
44]. The waveform of DPIM is similar to that of DPPM, except the variable frame length and the pulse are located at the beginning of the frame. In DPIM, each symbol starts with a pulse of short duration after the optional GS, followed by the number of empty time slots, which is determined by the decimal value of the bit input block. In other words, a symbol is represented by a discrete interval between consecutive pulses belonging to two consecutive frames. The GS consists of zero or more empty slots, and is vital to avoiding continuous pulses when the input symbol is zero. The frame length of the DPIM may vary depending on the bit input block. The number of DPIM and DPPM slots increases exponentially with OOK bit rates as bit resolution increases. If two systems are included in the GS, this increase is even greater. As the slot frequency increases, bandwidth requirements also increase.
In DH-PIM, a symbol consists of two sections: A heading that starts a symbol and an ending information section. The
nth symbol
starts with the header
of duration
and ends with the sequence of
empty slots, where
is an integer [
31,
40,
41]. Depending on the most significant bit (MSB) of the input block, two headers are considered,
and
, corresponding to
and
, respectively.
and
have pulses of
and
, respectively. Each pulse is followed by a GS of appropriate length
. The value of empty slots
is the decimal value of the input block if the symbol starts with
. If the symbol starts with
, it is the decimal value of the 1’s complement of the input code word. The header pulses play the dual role of symbol initiation and time reference for the preceding and succeeding symbols, resulting in built-in symbol synchronization. In other words, DH-PIM creates a symbol to enable built-in symbol synchronization. Thus, like the DPPM symbol, the DH-PIM removes the extra time slot after the pulse and increases the average symbol length compared with PIM, thus increasing data throughput.
Comparisons of modulation techniques with fixed pulse width are based on various parameters, such as bandwidth occupancy, distortion, SNR, suitability for transmission channels, and error probability. No scheme yields optimal performance and negotiates all signals. For optical transmission, DPTMs are preferred because of their high pulse peak power and low average power characteristics. They require higher bandwidth than OOK, and provide a higher SNR. If
M-bits are needed to present a symbol, OOK requires
M time slots and maximum
M pulses, but DPTM requires
time slots and one or two pulses. In the case of LIDAR, since the laser pulse reflected from the object is received, as shown in Equation (
3), the higher the pulse peak power used for transmission, the longer the distance that can be measured. The pulse peak power is limited by the MPE, so the smaller the number of pulses, the higher the pulse peak power that can be used. Therefore, LIDAR can measure a longer distance by adopting a method such as DPTM, in which the number of pulses necessary for symbol representation is small. The disadvantage of DPTM is that it requires symbol synchronization and, therefore, more circuitry and complexity than other approaches, which are outside of the scope of this paper.
Table 1 and
Table 2 [
31,
40,
41,
42,
43,
44,
45,
46,
47,
50,
51] summarize the characteristics of
M-bit input blocks when they are converted into symbols by OOK, PPM, DPPM, MPPM, DPIM, and DH-PIM, where
is the time slot rate and
is the energy of noise. In the case of optical communication, the influence of path loss can be ignored. The maximum transmitted energy is calculated using the received average energy. The received energy per bit, received energy per symbol, and power efficiency are calculated using the maximum transmitted energy. By contrast, in the case of LIDAR, the maximum energy to be emitted is fixed, and the reflected signal from the object is received. Thus, the influence of path loss must be reflected in the received energy. Therefore, in this paper, energy
emitted from LIDAR is reflected off the surface of an object at a distance
R away, and the received energy
is calculated by Equation (
3).
is the optics transmission;
is the atmospheric transmission;
is the receiver aperture diameter;
is the target surface reflectivity; and
is the target surface angular dispersion. The received energy per bit
and received energy per symbol
are calculated by
Table 2.
Table 3 [
31,
40,
43,
44,
45,
47,
50,
51,
53,
54,
55] summarizes the error probability of the digital pulse modulation techniques. The symbol error rate (SER)
is calculated by Equation (
4) and
Table 3, and the packet error rate (PER)
by Equation (
5) and
Table 3 using
, which is the received energy according to each modulation technique.
is the probability of ‘0’,
is the probability of ‘1’,
is the marginal probability of ‘0’,
is the marginal probability of ‘1’, Q–function
is the probability that a standard Gaussian random variable takes a value larger than
x,
M is the size of the bit block,
is the number of bits in a packet, and
is the average symbol length. The packet is a sequence of the pulses and the empty slots that is dedicated to a measurement point and generated by the modulation scheme. The SER
is optimum when the threshold factor
k is 0.5.
2.2. One-Dimensional Optical Spreading Codes
Time-division multiple access (TDMA), wavelength-division multiple access (WDMA), and OCDMA are techniques of multiple access in optical wireless communications that implement multiplexed transmission and multiple access. Of these, OCDMA supports simultaneous multiple transmissions at the same frequency and the same time slot, and it uses optical spreading codes so that multiple users can be separately identified without interfering with one another. In the simplest type of optical spreading code, one-bit period
is divided into
M time chips with duration
, and these
M chips are filled with optically spread code. That is, the spreading code sequence is selected to characterize the maximum auto-correlation and minimum cross-correlation to optimize the difference between a correct signal and interference. Primary time spreading codes suitable for OCDMA schemes are OOCs and various PC families. These are very sparse codes, and their code weights are small, thus requiring a long transmission time after spreading. In optical spreading codes, the weight is the number of ones in each of its codewords and the most important parameters in characterizing spreading codes, such as the number of chips, pulse peak power, and error probability [
27].
OOCs are generally expressed as a quadruple
, where
N is the code length,
w is code weight (i.e., the number of ones),
is the upper bound of the autocorrelation value for a non-zero shift, and
is the upper limit of the cross-correlation value [
29,
56,
57,
58]. In the OOC, a particular case where
is expressed by the optimal OOC
.
represents the cardinality of the OOC family (i.e., the size of the code set as the number of codewords in the code set). For OOCs to satisfy the condition
,
is upper-bounded by
, where the
equation denotes the largest integer less than or equal to
x. Various algorithms can generate OOC codes that satisfy this condition. By default, the unipolar sequences generated by these algorithms can all be assumed to be OOC code sets, as long as the code set correlation constraints are met. The code generation of OOC
and OOC
are shown in
Table 4 and
Table 5, respectively.
Compared to that of OOC, the PC generation process is relatively simple. A code set with a code length of
and code weight
has
p unique sequences [
24,
27,
29]. An example of a PC set with
is shown in
Table 6. The main disadvantage of PC is that the number of available codes is limited. The code length of PC is only
, which may affect the system’s performance in terms of bit error rate (BER) and multiple access interference (MAI) [
24,
27]. Therefore, longer codes that maintain desirable properties are beneficial.
As the cardinality of the PC corresponds to the number of concurrent users,
M, it is equal to the
w of the PC, and
w is equal to the prime number
p. Thus,
p must be increased. To increase the number of users on the network, the weight
w must be greater. A modified prime code (MPC) has been proposed to overcome the drawbacks of the PC [
24,
27,
29,
59]. This optical sequence eliminates some redundant pulses from the original PC with a pulse, assuming a BER requirement such as
and a certain number of users. The weight of the MPC is smaller than that of the PC, but the code can support the
p group containing
p sequences and
subscribers having the same code sequence length as
. The configuration of MPC is as follows: Generate the PC with
p codewords. Any
pulse is removed from this PC, and the remaining pulses form a new code with a constant weight
w. The length, weight, and cardinality of the MPC are
n,
, and
, respectively. An example of an MPC set with
and
is shown in
Table 7.
Table 8 summarizes the characteristics of OOC, PC, and MPC, including length, weight, peak auto-correlation, peak cross-correlation, cardinality, and bit error probability (
), where
M is the number of concurrent users [
24,
27,
29,
56,
57,
58,
59,
60,
61,
62,
63,
64,
65,
66].








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}