Estimating Pore Water Electrical Conductivity of Sandy Soil from Time Domain Reflectometry Records Using a Time-Varying Dynamic Linear Model


Abstract
:1. Introduction
- (i)
- many effects are left unknown since the objective of the model is to represent the main modes of system response,
- (ii)
- deterministic models are driven not by only our own control inputs but also disturbances which we can neither control nor model deterministically, and
- (iii)
2. Material and Methods
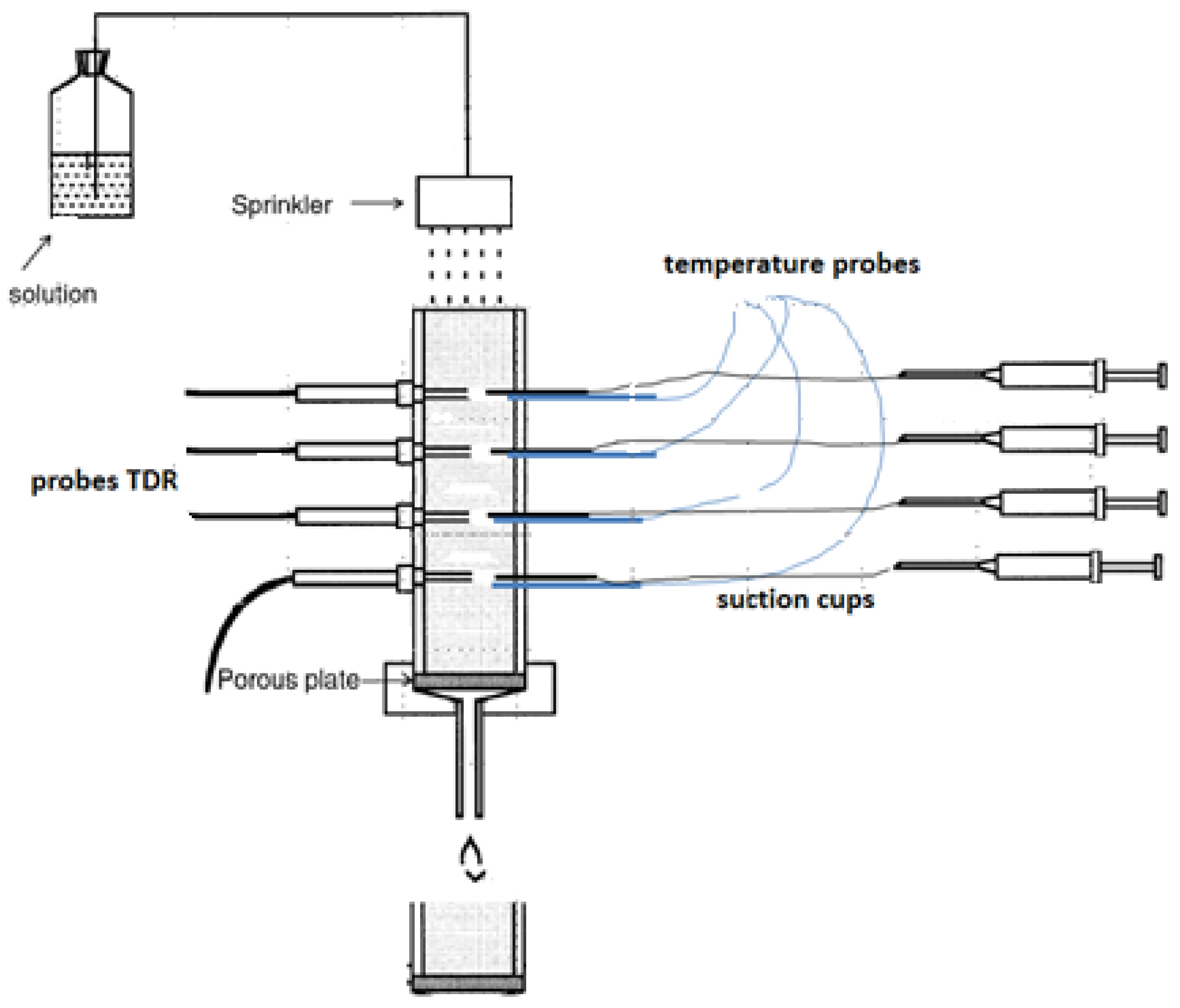
2.1. The Column Experiment
2.2. Time-Varying Dynamic Linear Model
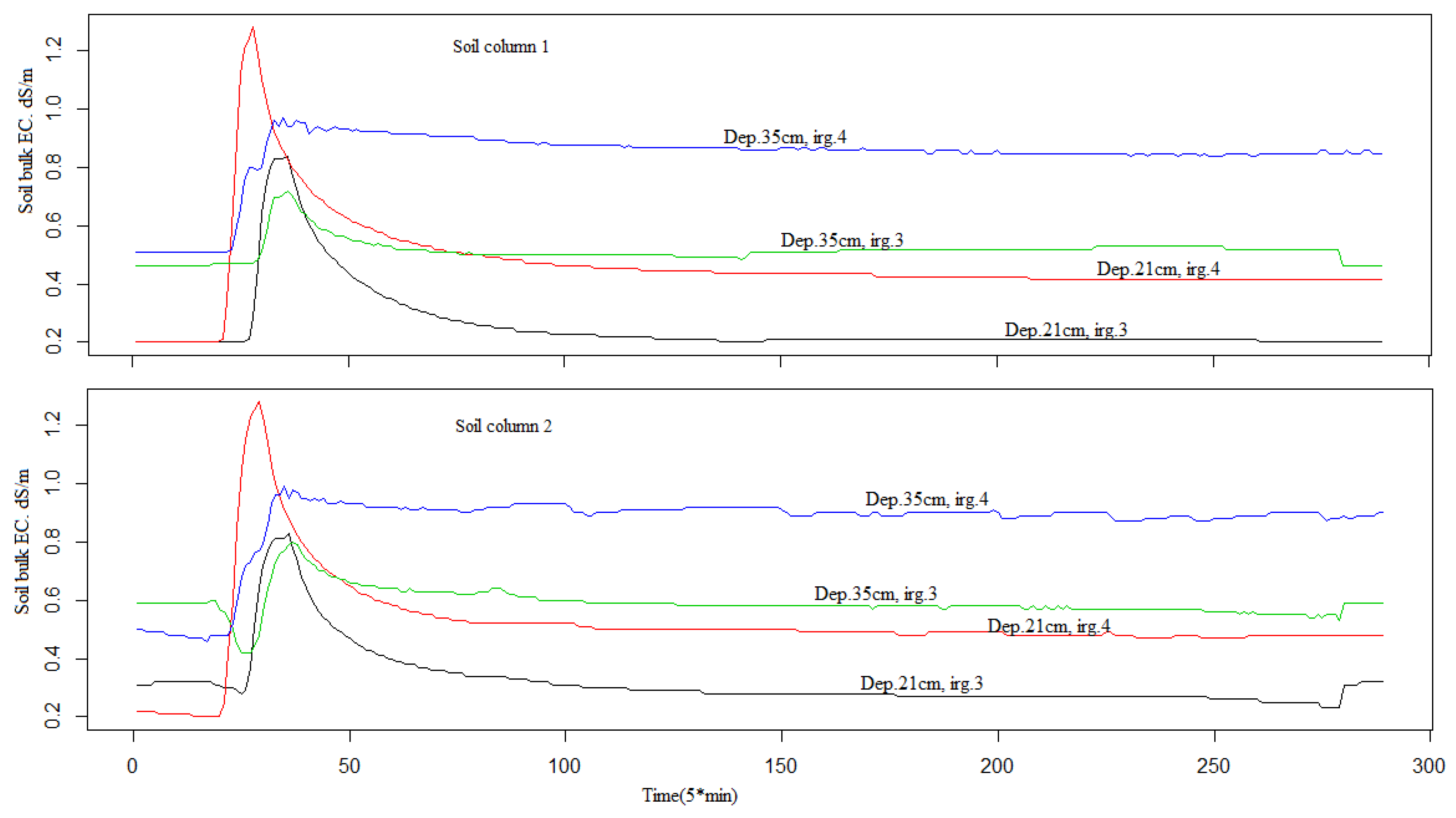
3. Results and Discussion
3.1. Deterministic Model
3.2. Time-Varying Linear Dynamic Model (LDM)
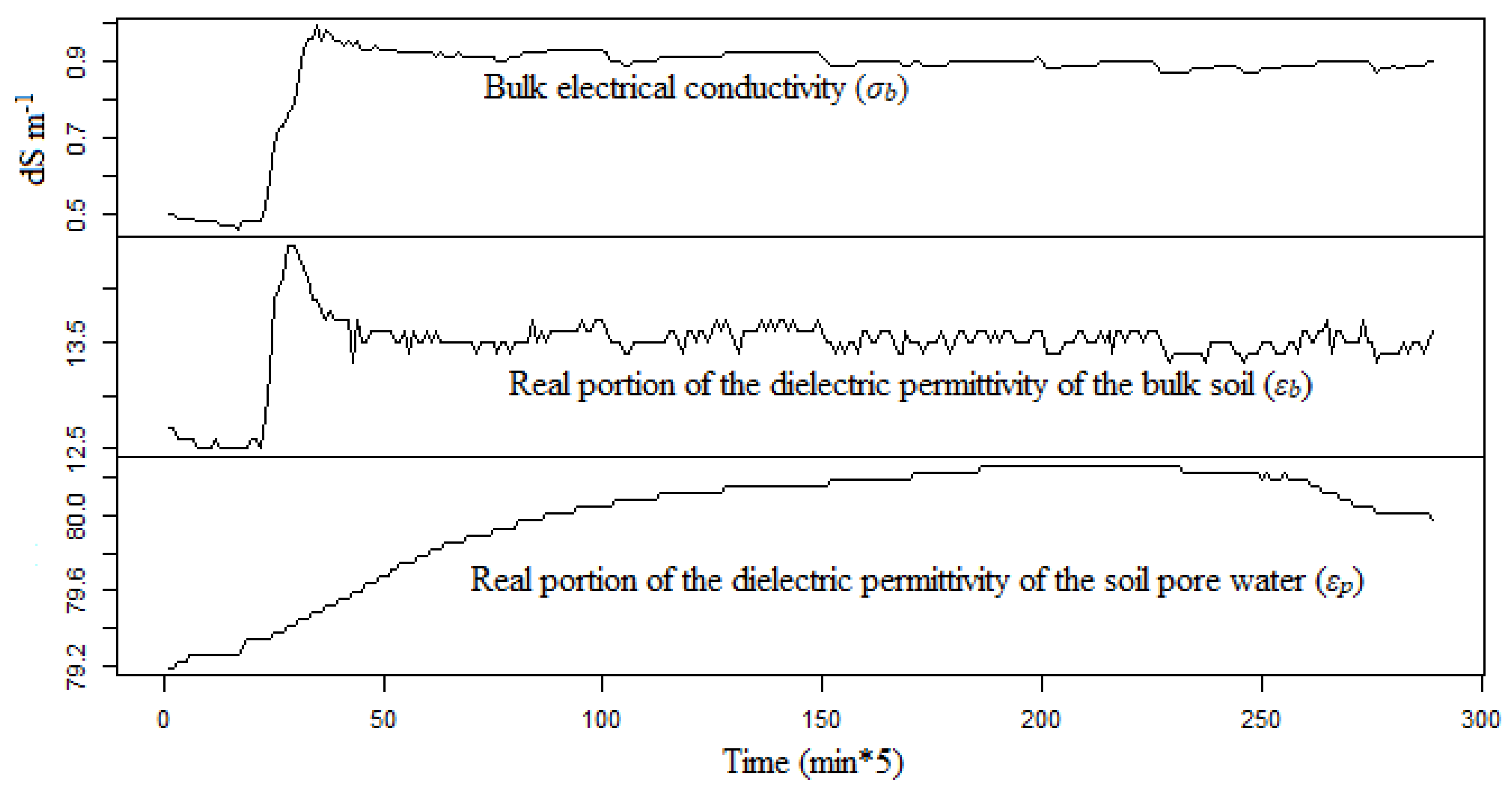
- The observation equation can be obtained by modifying the Hilhorst model [3] (written in Equation (5)) into a stochastic equation, in accordance with Equation (4) as follows:
- The state equation (unobservable data) in Equation (3) is εσb = 0, and the slope, 1/σp. They can be converted to the unobservable state equation of the time-varying DLM according to Equation (3). The unobservable state equation can be arranged as follows:
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Thiruchelvam, S.; Pathmarajah, S. An Economic Analysis of Salinity Problems in the Mahaweli River System H Irrigation Scheme in Sri Lanka; EEPSEA: Ho Chi Minh, Vietnam, 1999; p. 47. [Google Scholar]
- Ghassemi, F.; Jakeman, A.J.; Nix, H.A. Salinisation of Land and Water Resources: Human Causes, Extent, Management and Case Studies; CAB International: Wallingford, CT, USA, 1995. [Google Scholar]
- Hilhorst, M.A. A Pore Water Conductivity Sensor. Soil Sci. Soc. Am. J. 2000, 64, 1922–1925. [Google Scholar] [CrossRef]
- Hajrasuliha, S.; Baniabbassi, N.; Metthey, J.; Nielsen, D.R. Spatial Variability of Soil Sampling for Salinity Studies in Southwest Iran. Irrig. Sci. 1980, 1, 197–208. [Google Scholar] [CrossRef]
- Cetin, M.; Kirda, C. Spatial and Temporal Changes of Soil Salinity in a Cotton Field Irrigated with Low-Quality Water. J. Hydrol. 2003, 272, 238–249. [Google Scholar] [CrossRef]
- Rhoades, J.D.; Shouse, P.J.; Alves, W.J.; Manteghi, N.A.; Lesch, S.M. Determining Soil Salinity from Soil Electrical Conductivity Using Different Models and Estimates. Soil Sci. Soc. Am. J. 1990, 54, 46–54. [Google Scholar] [CrossRef]
- Shouse, P.J.; Goldberg, S.; Skaggs, T.H.; Soppe, R.W.O.; Ayars, J.E. Changes in Spatial and Temporal Variability of SAR Affected by Shallow Groundwater Management of an Irrigated Field, California. Agric. Water Manag. 2010, 97, 673–680. [Google Scholar] [CrossRef]
- Li, X.; Yang, J.; Liu, M.; Liu, G.; Yu, M. Spatio-Temporal Changes of Soil Salinity in Arid Areas of South Xinjiang Using Electromagnetic Induction. J. Integr. Agric. 2012, 11, 1365–1376. [Google Scholar] [CrossRef]
- Kargas, G.; Persson, M.; Kanelis, G.; Markopoulou, I.; Kerkides, P. Prediction of Soil Solution Electrical Conductivity by the Permittivity Corrected Linear Model Using a Dielectric Sensor. J. Irrig. Drain. Eng. 2017, 143, 04017030. [Google Scholar] [CrossRef]
- Persson, M. Evaluating the Linear Dielectric Constant-Electrical Conductivity Model Using Time-Domain Reflectometry. Hydrol. Sci. J. 2002, 47, 269–277. [Google Scholar] [CrossRef]
- Wyllie, M.R.J.; Southwick, P.F. An Experimental Investigation of the S.P. and Resistivity Phenomena in Dirty Sands. J. Pet. Technol. 1954, 6, 44–57. [Google Scholar] [CrossRef]
- Rhoades, J.D.; Raats, P.A.C.; Prather, R.J. Effects of Liquid-Phase Electrical Conductivity, Water Content, and Surface Conductivity on Bulk Soil Electrical Conductivity1. Soil Sci. Soc. Am. J. 1976, 40, 651–655. [Google Scholar] [CrossRef]
- Mualem, Y.; Friedman, S.P. Theoretical Prediction of Electrical Conductivity in Saturated and Unsaturated Soil. Water Res. Res. 1991, 27, 2771–2777. [Google Scholar] [CrossRef]
- Malicki, M.A.; Walczak, R.T. Evaluating Soil Salinity Status from Bulk Electrical Conductivity and Permittivity. Eur. J. Soil Sci. 1999, 50, 505–514. [Google Scholar] [CrossRef]
- Malicki, M.A.; Walczak, R.; Koch, S.; Fluhler, H. Determining Soil Salinity from Simultaneous Readings of Its Electrical Conductivity and Permittivity Using TDR. In Proceedings of the Symposium and Workshop on Time Domain Reflectometry in Environmental, Infrastructure, and Mining Applications, Evanston, IL, USA, 7–9 September 1994; Volume 101, pp. 7–9. [Google Scholar]
- Decagon Devices. 5TE Water Content, EC, and Temperature Sensors Operator’s Manual; Decagon Devices: Pullman, WA, USA, 2008. [Google Scholar]
- Rodriguez, A.; Ruben, F. Calibrating Capacitance Sensors to Estimate Water Content, Matric Potential, and Electrical Conductivity in Soilless Substrates. Master’s Thesis, University of Maryland, College Park, MD, USA, 2009. [Google Scholar]
- Bouksila, F.; Persson, M.; Berndtsson, R.; Bahri, A. Soil Water Content and Salinity Determination Using Different Dielectric Methods in Saline Gypsiferous Soil/Détermination de La Teneur En Eau et de La Salinité de Sols Salins Gypseux à l’aide de Différentes Méthodes Diélectriques. Hydrol. Sci. J. 2008, 53, 253–265. [Google Scholar] [CrossRef]
- Visconti, F.; Martínez, D.; Molina, M.J.; Ingelmo, F.; Miguel de Paz, J. A Combined Equation to Estimate the Soil Pore-Water Electrical Conductivity: Calibration with the WET and 5TE Sensors. Soil Res. 2014, 52, 419–430. [Google Scholar] [CrossRef]
- Maybeck, P.S. Stochastic Models, Estimation, and Control; Academic Press: Cambridge, MA, USA, 1982. [Google Scholar]
- Genuchten, M.V. Recent Progress in Modelling Water Flow and Chemical Transport in the Unsaturated Zone. In Proceedings of the 20th General Assembly of the International Union of Geodesy and Geophysics, Vienna, Austria, 11–24 August 1991; pp. 169–183. [Google Scholar]
- Aljoumani, B.; Sànchez-Espigares, J.A.; Cañameras, N.; Wessolek, G.; Josa, R. Transfer Function and Time Series Outlier Analysis: Modelling Soil Salinity in Loamy Sand Soil by Including the Influences of Irrigation Management and Soil Temperature. Irrig. Drain. 2018, 67, 282–294. [Google Scholar] [CrossRef]
- Aljoumani, B.; Sànchez-Espigares, J.A.; Cañameras, N.; Josa, R. An Advanced Process for Evaluating a Linear Dielectric Constant–Bulk Electrical Conductivity Model Using a Capacitance Sensor in Field Conditions. Hydrol. Sci. J. 2015, 60, 1828–1839. [Google Scholar] [CrossRef]
- Aljoumani, B.; Sànchez-Espigares, J.A.; Cañameras, N.; Josa, R.; Monserrat, J. Time Series Outlier and Intervention Analysis: Irrigation Management Influences on Soil Water Content in Silty Loam Soil. Agric. Water Manag. 2012, 111, 105–114. [Google Scholar] [CrossRef]
- Beven, K.; Germann, P. Macropores and Water Flow in Soils. Water Res. Res. 1982, 18, 1311–1325. [Google Scholar] [CrossRef]
- White, R.E. The Influence of Macropores on the Transport of Dissolved and Suspended Matter Through Soil. In Advances in Soil Science; Stewart, B.A., Ed.; Springer: New York, NY, USA, 1985; pp. 95–120. [Google Scholar]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Wendroth, O.; Rogasik, H.; Koszinski, S.; Ritsema, C.J.; Dekker, L.W.; Nielsen, D.R. State-space Prediction of field-scale Soil Water Content Time Series in a Sandy Loam. Soil Tillage Res. 1999, 9, 85–93. [Google Scholar] [CrossRef]
- Hoeben, R.; Troch, P.A. Assimilation of Active Microwave Observation Data for Soil Moisture Profile Estimation. Water Resour. Res. 2000, 36, 2805–2819. [Google Scholar] [CrossRef]
- Moradkhani, H.; Sorooshian, S.; Gupta, H.V.; Houser, P.R. Dual State–Parameter Estimation of Hydrological Models Using Ensemble Kalman Filter. Adv. Water Resour. 2005, 28, 135–147. [Google Scholar] [CrossRef]
- Anderson, J.L. An Ensemble Adjustment Kalman Filter for Data Assimilation. Mon. Weather Rev. 2001, 129, 2884–2903. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Weerts, A.H.; Clark, M.; Hendricks Franssen, H.-J.; Kumar, S.; Moradkhani, H.; Seo, D.-J.; Schwanenberg, D.; Smith, P.; van Dijk, A.I.J.M.; et al. Advancing Data Assimilation in Operational Hydrologic Forecasting: Progresses, Challenges, and Emerging Opportunities. Hydrol. Earth Syst. Sci. 2012, 16, 3863–3887. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2013. [Google Scholar]
- Petris, G. An R Package for Dynamic Linear Models. J. Stat. Softw. 2010, 36. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Estimate | Std. Error | t Value | Pr (>|t|) | |
|---|---|---|---|---|
| εσb = 0 | 9.411 | 8.591 × 10‒3 | 1095.4 | <2 × 10‒16 *** |
| 1/σp | 6.963 × 10‒4 | 4.461 × 10‒6 | 156.1 | <2 × 10‒16 *** |
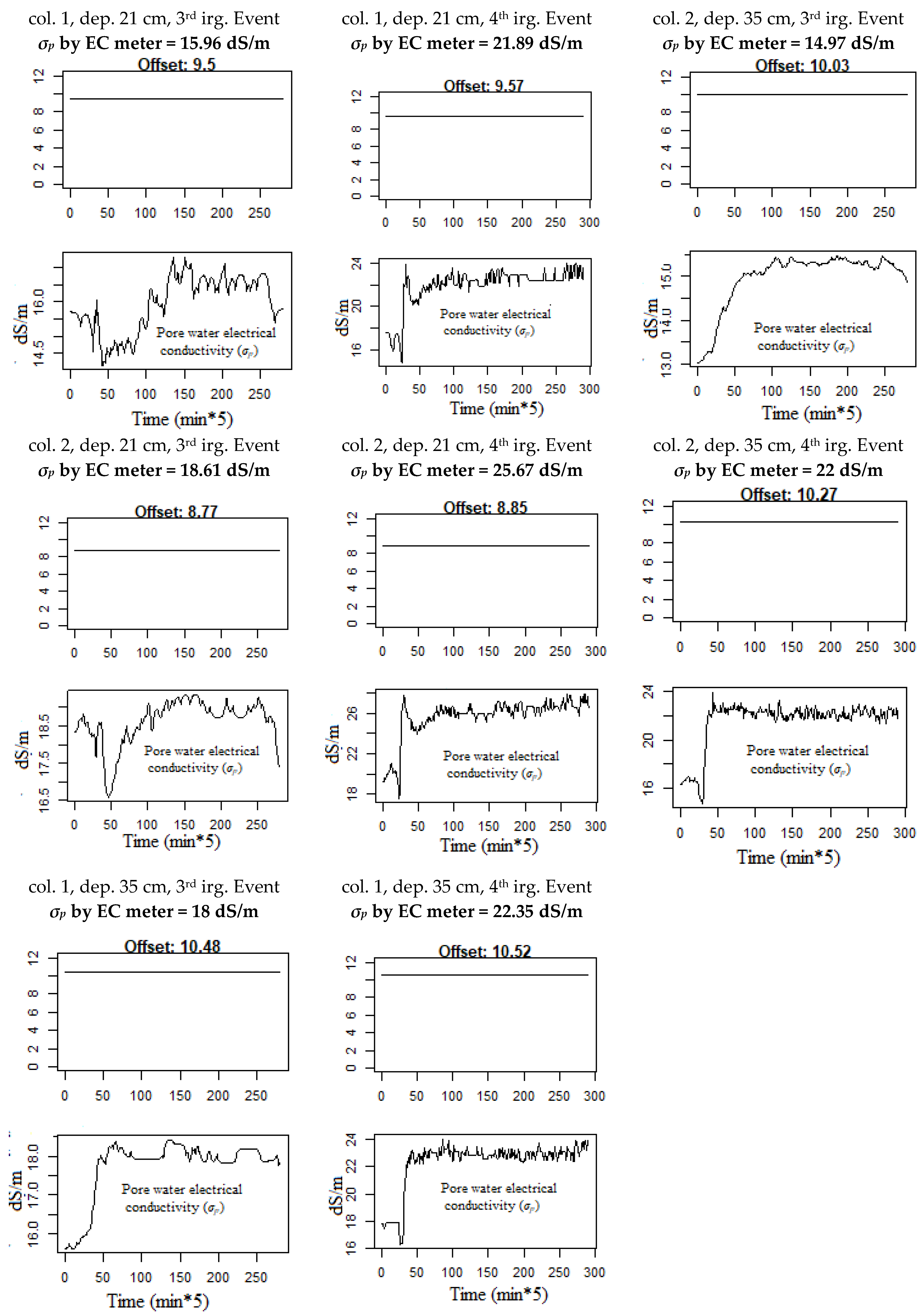
| Soil Column 1 | Soil Column 2 | ||||||
|---|---|---|---|---|---|---|---|
| Irrigation Event 3 | Irrigation Event 4 | Irrigation Event 3 | Irrigation Event 4 | ||||
| Depth: 21 cm | Depth: 35 cm | Depth: 21 cm | Depth: 35 cm | Depth: 21 cm | Depth: 35 cm | Depth: 21 cm | Depth: 35 cm |
| 15.96 | 18 | 21.89 | 22.35 | 18.61 | 14.97 | 25.67 | 22 |
| Lag | Autocorrelation | D-W Statistic | p-Value |
|---|---|---|---|
| 1 | 0.852 | 0.278 | 0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aljoumani, B.; Sanchez-Espigares, J.A.; Wessolek, G. Estimating Pore Water Electrical Conductivity of Sandy Soil from Time Domain Reflectometry Records Using a Time-Varying Dynamic Linear Model. Sensors 2018, 18, 4403. https://doi.org/10.3390/s18124403
Aljoumani B, Sanchez-Espigares JA, Wessolek G. Estimating Pore Water Electrical Conductivity of Sandy Soil from Time Domain Reflectometry Records Using a Time-Varying Dynamic Linear Model. Sensors. 2018; 18(12):4403. https://doi.org/10.3390/s18124403
Chicago/Turabian StyleAljoumani, Basem, Jose A. Sanchez-Espigares, and Gerd Wessolek. 2018. "Estimating Pore Water Electrical Conductivity of Sandy Soil from Time Domain Reflectometry Records Using a Time-Varying Dynamic Linear Model" Sensors 18, no. 12: 4403. https://doi.org/10.3390/s18124403