Coordinated Unmanned Aircraft System (UAS) and Ground-Based Weather Measurements to Predict Lagrangian Coherent Structures (LCSs)

 ,
,  , , , ,
, , , ,  and
and
Abstract
:
1. Introduction
2. Materials and Methods
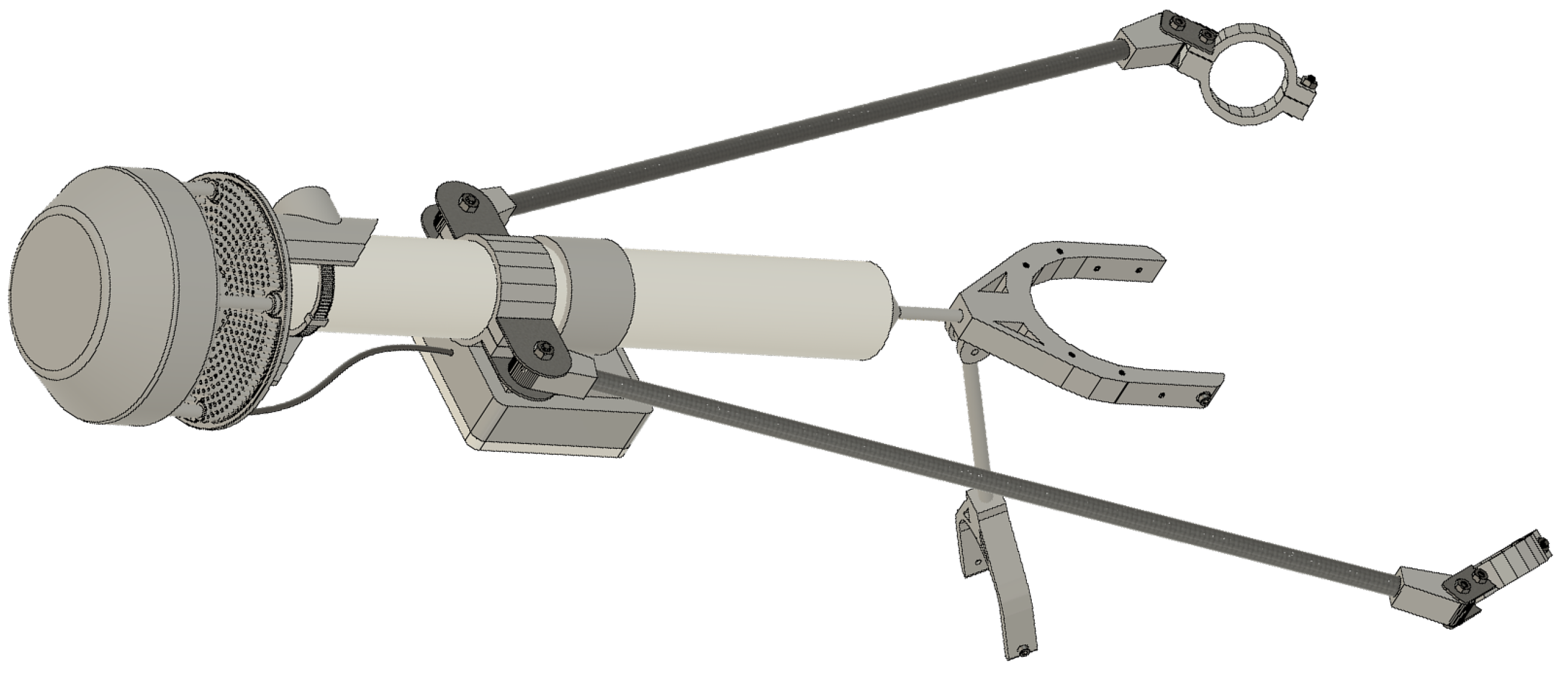
2.1. Sensor Package Onboard UAS
2.2. Permissions for Flight Operations
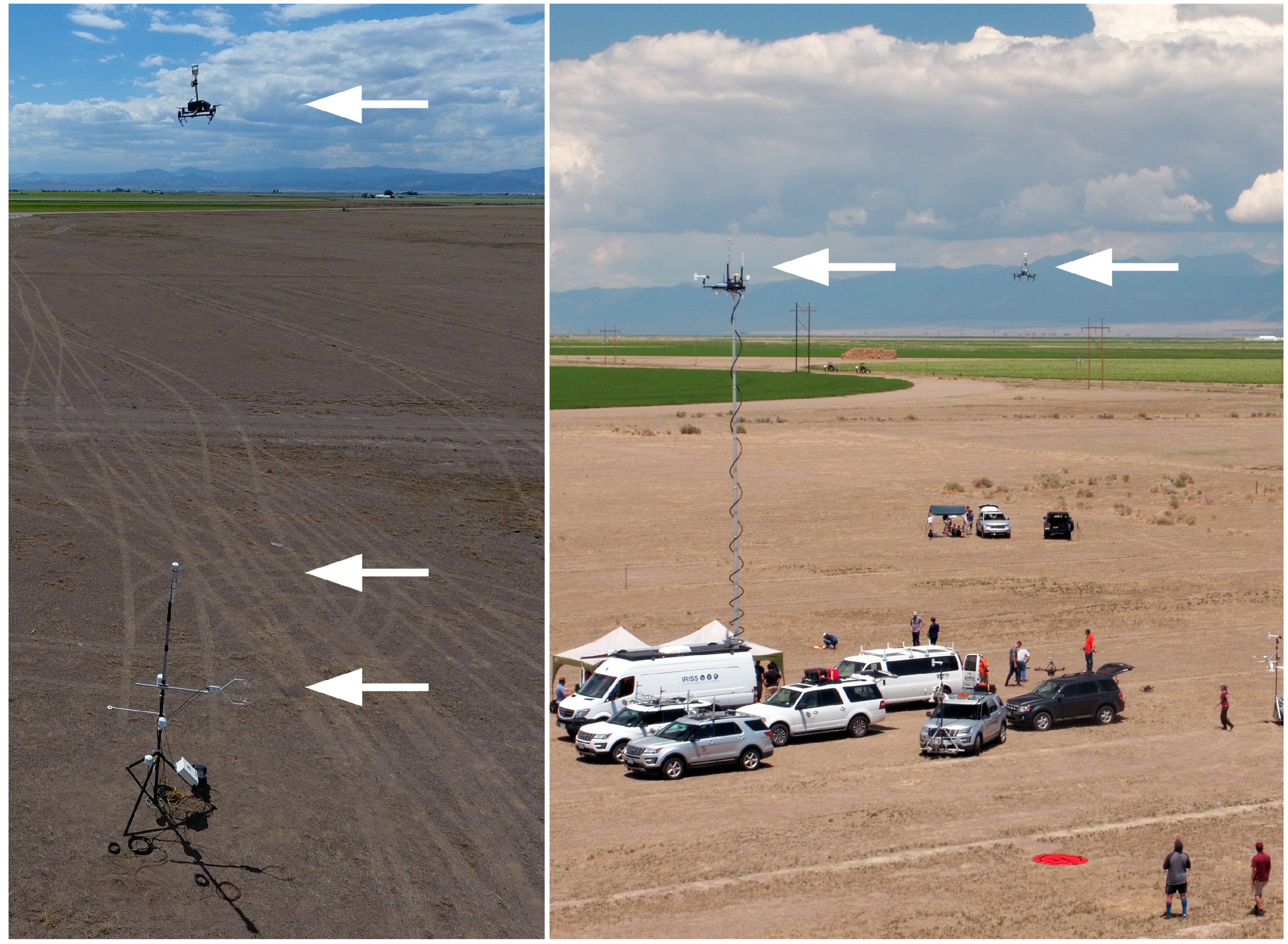
2.3. Coordinated Aerial and Ground-Based Measurements
2.3.1. Calibration Flight with Vertical Array of Sensors at 10 m (UAS), 4 m (Ground), and 2 m (Ground)
2.3.2. Calibration Flights with One Ground-Based Sensor at 15 m (MURC) and One UAS at 15 m
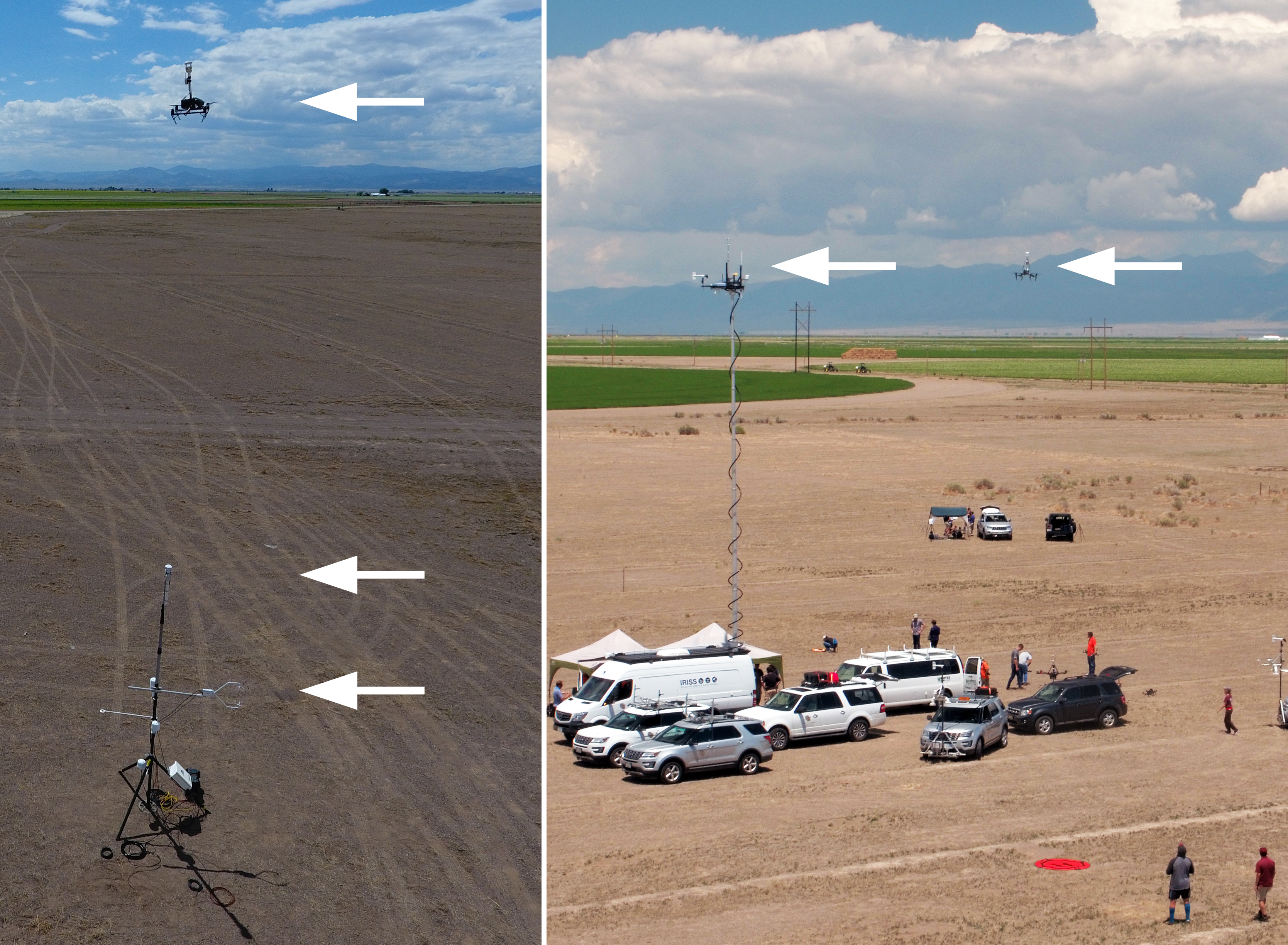
2.3.3. Simultaneous Flights with Sensors at 15 m in a Triangle Formation (two UASs, and Two Ground Sensors)
2.4. WRF-LES Model
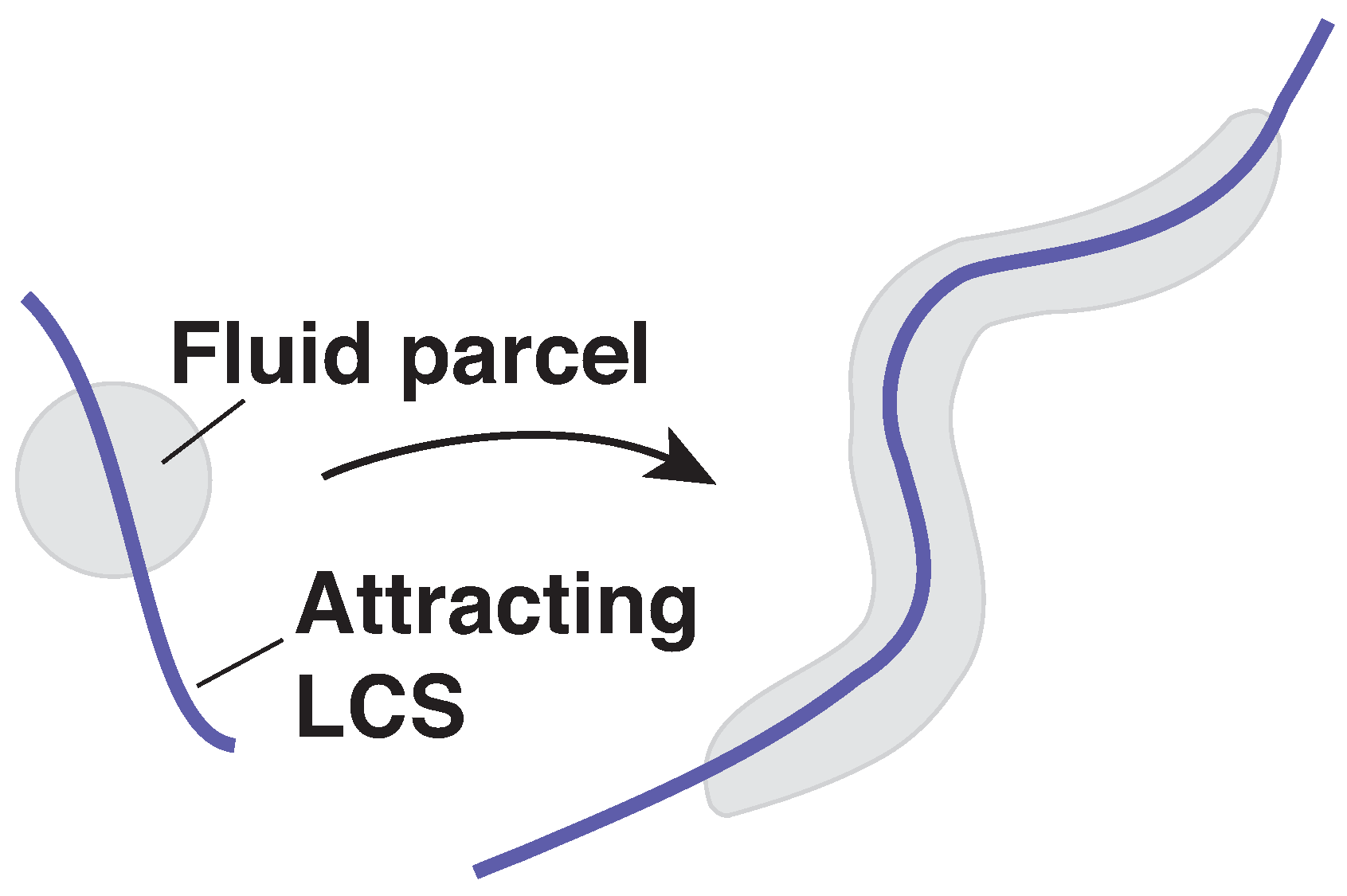
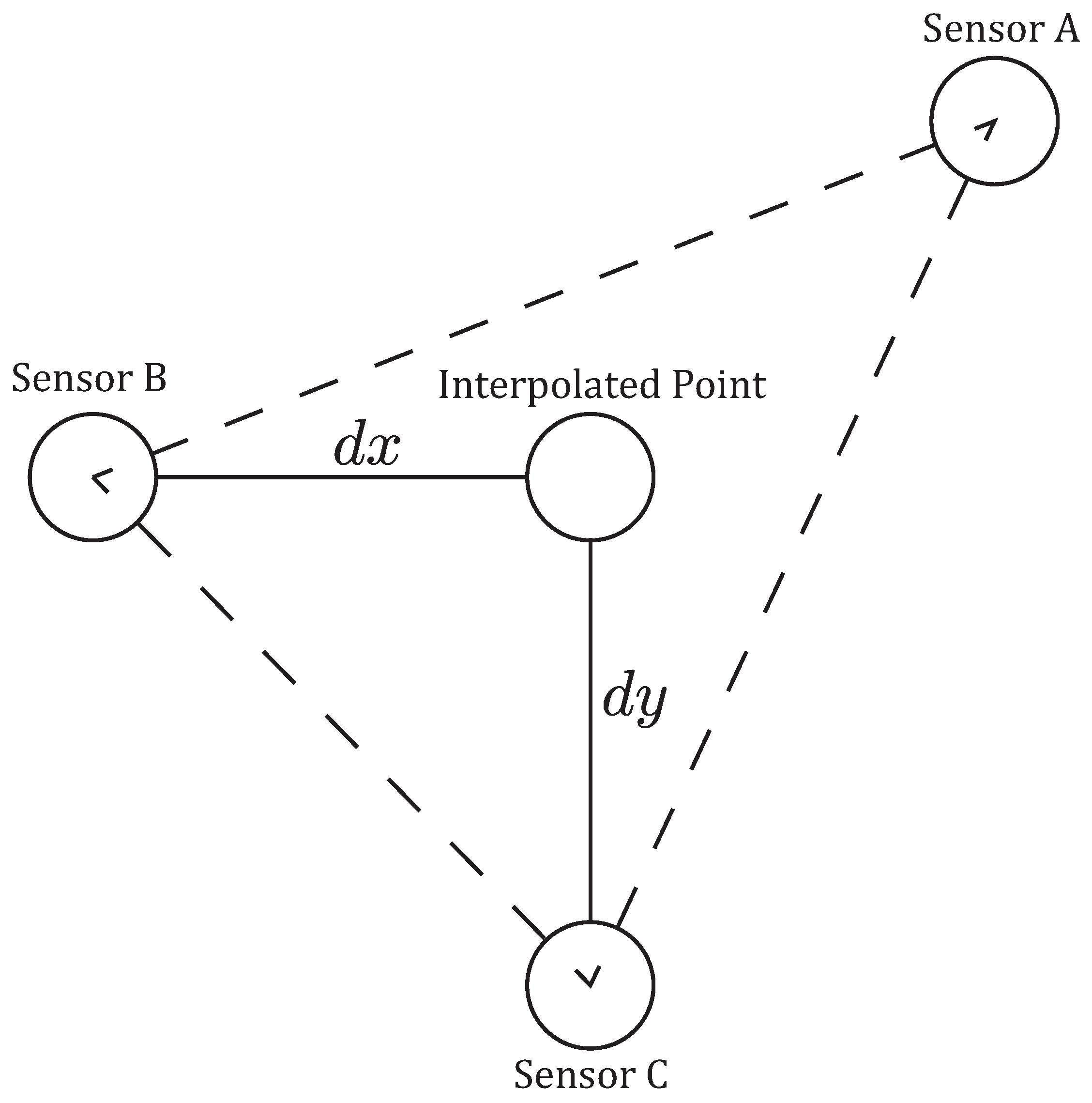
2.5. Lagrangian-Eulerian Analysis
2.6. Computation of Wind Gradient and Attraction Rate
2.7. Uncertainty Analysis
3. Results
3.1. Comparison of Measurements
3.1.1. Calibration Flights
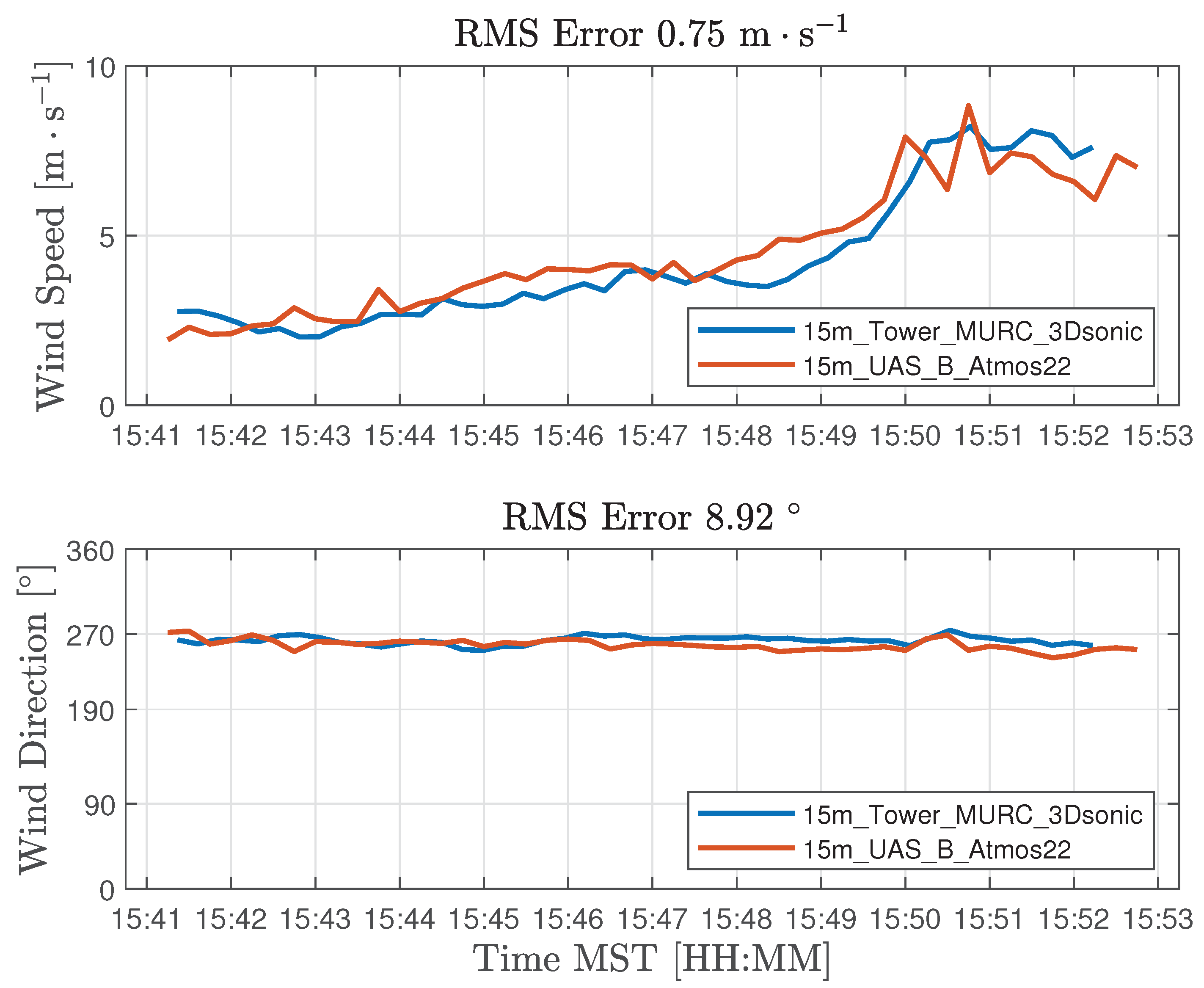
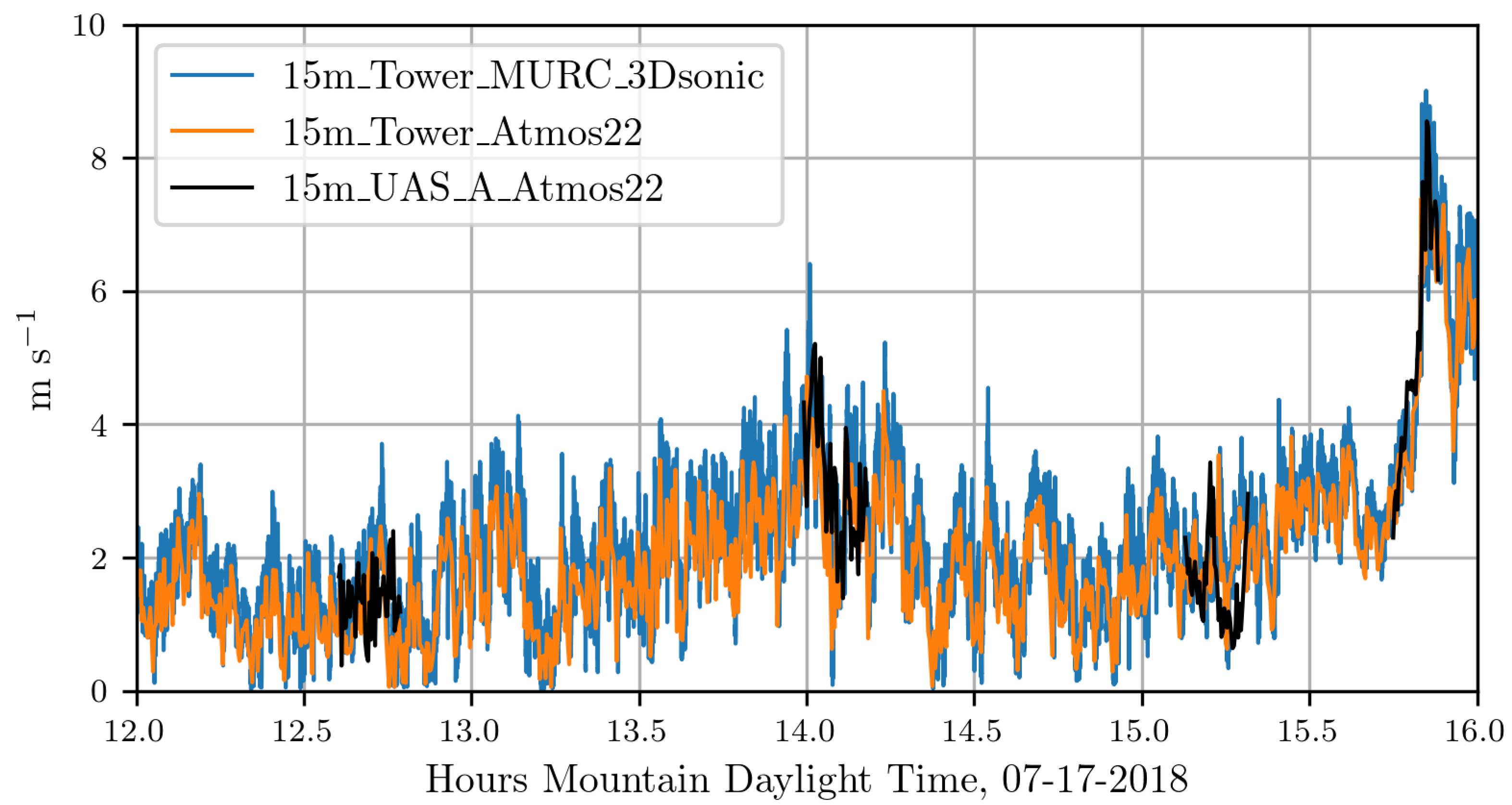
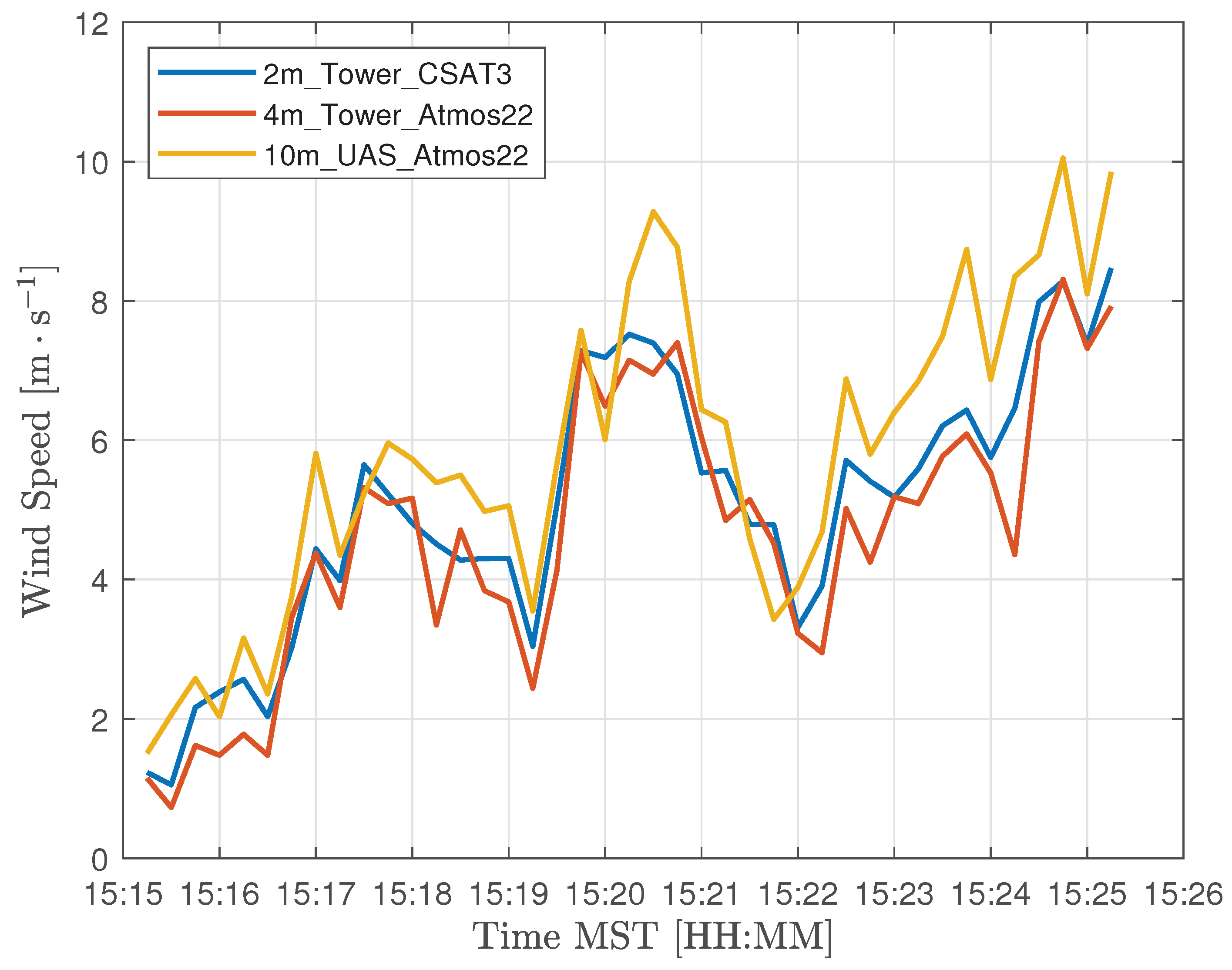
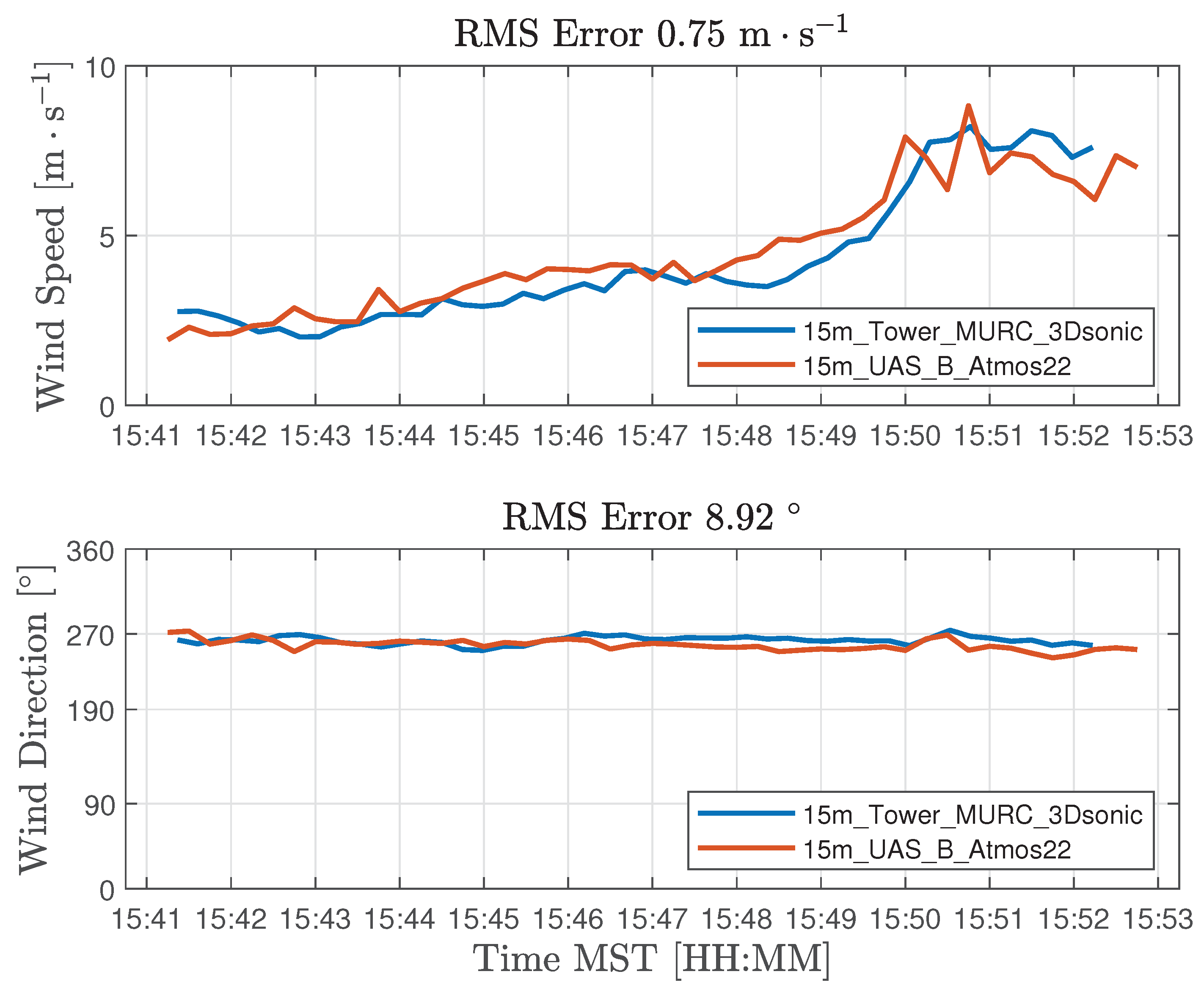
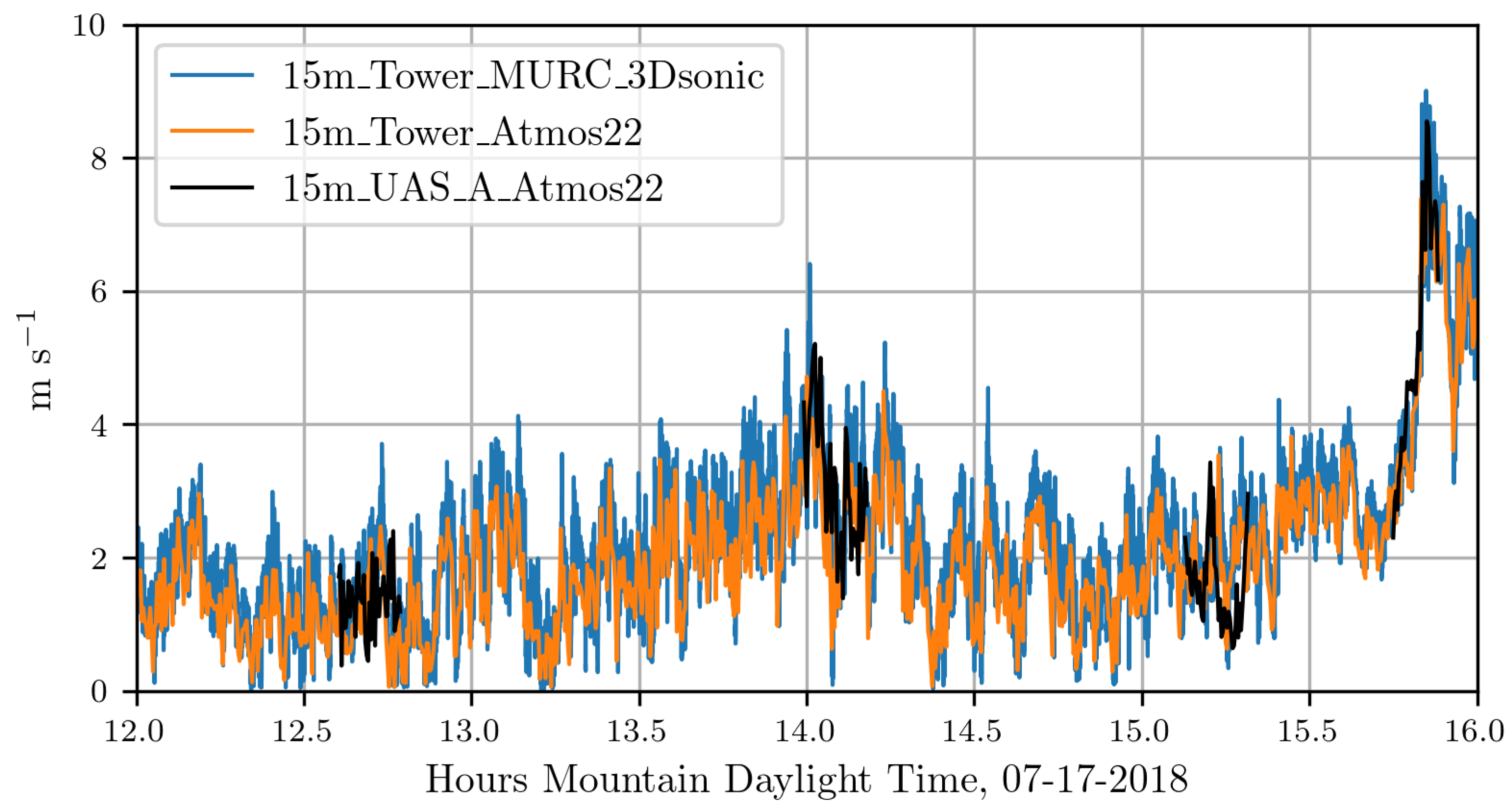
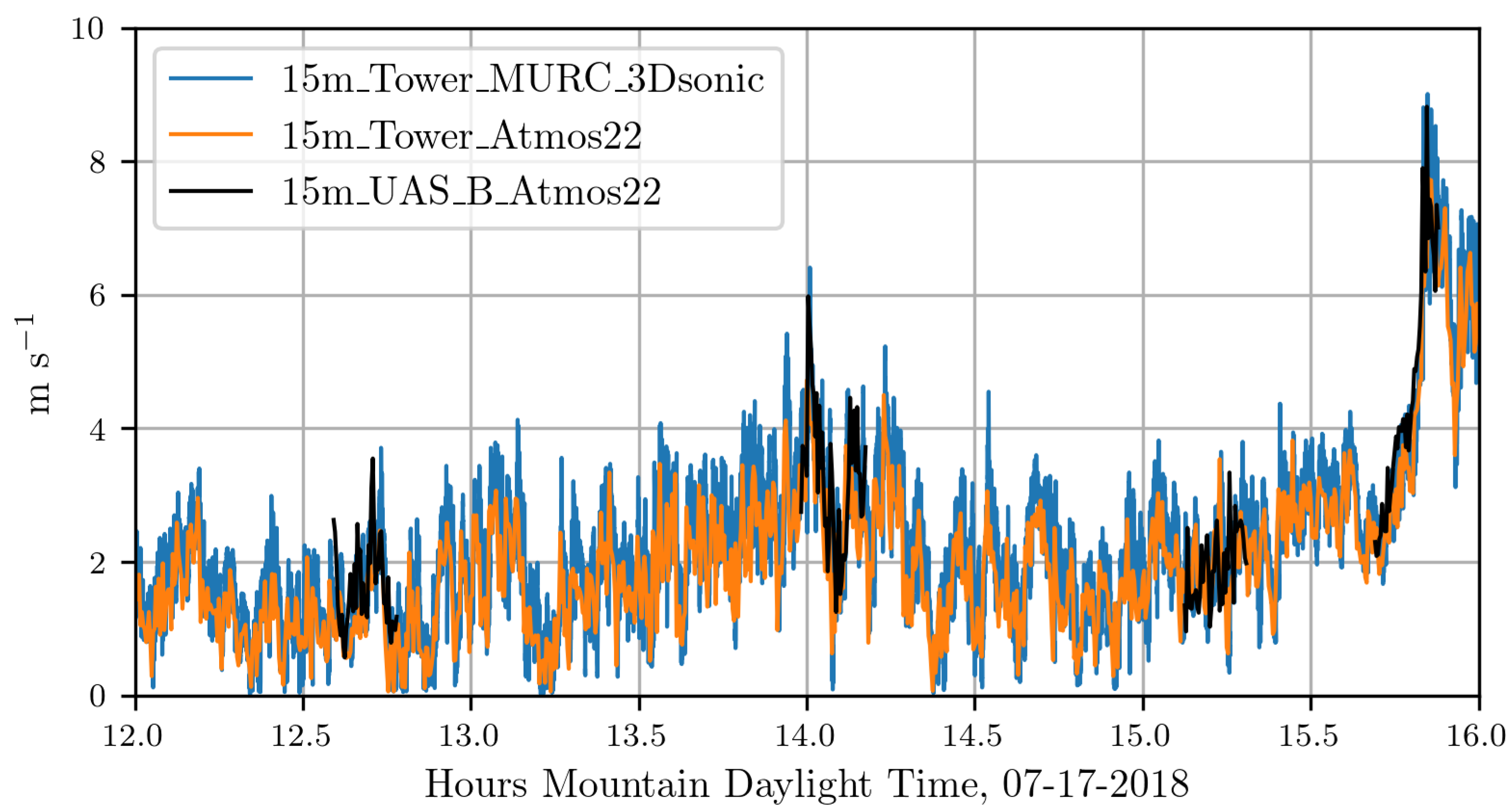
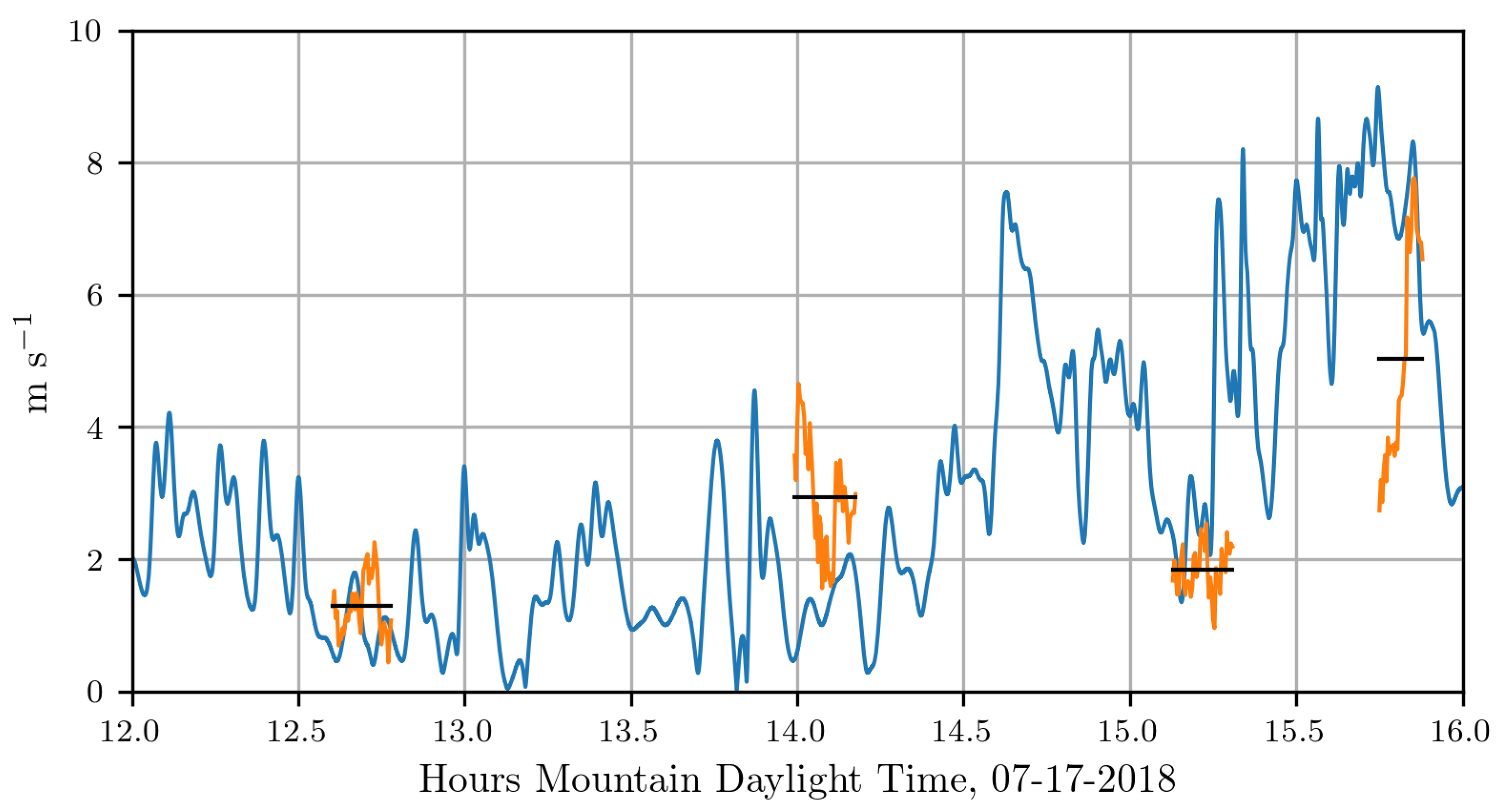
3.1.2. Wind Speed
3.2. Attraction Rate Measurements
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| UAS | unmanned aircraft systems |
| AGL | Above ground level |
| FTLE | Finite-time Lyapunov exponent |
| LCS | Lagrangian coherent structure |
| OECS | Objective Eulerian coherent structure |
| WRF | Weather research and forecasting |
| LES | Large eddy simulation |
References
- Villa, T.F.; Gonzalez, F.; Miljievic, B.; Ristovski, Z.D.; Morawska, L. An Overview of Small Unmanned Aerial Vehicles for Air Quality Measurements: Present Applications and Future Prospectives. Sensors 2016, 16, 72. [Google Scholar] [CrossRef] [PubMed]
- Hemingway, B.L.; Frazier, A.E.; Elbing, B.R.; Jacob, J.D. Vertical Sampling Scales for Atmospheric Boundary Layer Measurements from Small Unmanned Aircraft Systems (sUAS). Atmosphere 2017, 8, 176. [Google Scholar] [CrossRef]
- Chiliński, M.T.; Markowicz, K.M.; Kubicki, M. UAS as a Support for Atmospheric Aerosols Research: Case Study. Pure Appl. Geophys. 2018, 175, 3325–3342. [Google Scholar] [CrossRef]
- Anderson, K.; Gaston, K.J. Lightweight Unmanned Aerial Vehicles Will Revolutionize Spatial Ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef]
- Hill, M.; Konrad, T.; Meyer, J.; Rowland, J. Small, Radio-Controlled Aircraft as a Platform for Meteorological Sensors. Atmos. Technol. 1974, 6, 114–122. [Google Scholar]
- Elston, J.; Argrow, B.; Stachura, M.; Weibel, D.; Lawrence, D.; Pope, D. Overview of Small Fixed-wing Unmanned Aircraft for Meteorological Sampling. J. Atmos. Ocean. Technol. 2015, 32, 97–115. [Google Scholar] [CrossRef]
- Tian, P.; Chao, H. Model Aided Estimation of Angle of Attack, Sideslip Angle, and 3D Wind without Flow Angle Measurements. In Proceedings of the 2018 AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 8–12 January 2018; p. 1844. [Google Scholar] [CrossRef]
- Rhudy, M.B.; Larrabee, T.; Chao, H.; Gu, Y.; Napolitano, M. UAV Attitude, Heading, and Wind Estimation Using GPS/INS and an Air Data System. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Boston, MA, USA, 19–22 August 2013; p. 5201. [Google Scholar] [CrossRef]
- Wenz, A.; Johansen, T.A. Estimation of Wind Velocities and Aerodynamic Coefficients for UAVs using Standard Autopilot Sensors and a Moving Horizon Estimator. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1267–1276. [Google Scholar] [CrossRef]
- Wolf, C.A.; Hardis, R.P.; Woodrum, S.D.; Galan, R.S.; Wichelt, H.S.; Metzger, M.C.; Bezzo, N.; Lewin, G.C.; de Wekker, S.F.J. Wind Data Collection Techniques on a Multi-rotor Platform. In Proceedings of the Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 28–28 April 2017; pp. 32–37. [Google Scholar] [CrossRef]
- Tomoya, S.; Minoru, I.; Hirofumi, T.; Kansuke, S.; Masato, I. Estimation of Wind Vector Profile Using a Hexarotor Unmanned Aerial Vehicle and Its Application to Meteorological Observation up to 1000m above Surface. J. Atmos. Ocean. Technol. 2018, 35, 1621–1631. [Google Scholar] [CrossRef]
- De Boisblanc, I.; Dodbele, N.; Kussmann, L.; Mukherji, R.; Chestnut, D.; Phelps, S.; Lewin, G.C.; de Wekker, S.F.J. Designing a Hexacopter for the Collection of Atmospheric Flow Data. In Proceedings of the Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 25 April 2014; pp. 147–152. [Google Scholar] [CrossRef]
- Bruschi, P.; Dei, M.; Piotto, M. A Low-power 2-D Wind Sensor Based on Integrated Flow Meters. IEEE Sens. J. 2009, 9, 1688–1696. [Google Scholar] [CrossRef]
- Bruschi, P.; Piotto, M.; Dell’Agnello, F.; Ware, J.; Roy, N. Wind Speed and Direction Detection by Means of Solid-state Anemometers Embedded on Small Quadcopters. Procedia Eng. 2016, 168, 802–805. [Google Scholar] [CrossRef]
- Neumann, P.P.; Matthias, B. Real-time Wind Estimation on a Micro Unmanned Aerial Vehicle Using its Inertial Measurement Unit. Sens. Actuators A Phys. 2015, 235, 300–310. [Google Scholar] [CrossRef]
- Palomaki, R.T.; Rose, N.T.; van den Bossche, M.; Sherman, T.J.; De Wekker, S.F.J. Wind Estimation in the Lower Atmosphere Using Multirotor Aircraft. J. Atmos. Ocean. Technol. 2017, 34, 1183–1191. [Google Scholar] [CrossRef]
- Donnell, G.W.; Feight, J.A.; Lannan, N.; Jacob, J.D. Wind Characterization Using Onboard IMU of sUAS. In Proceedings of the 2018 Atmospheric Flight Mechanics Conference, Atlanta, GA, USA, 25–29 June 2018; p. 2986. [Google Scholar]
- Moyano Cano, J. Quadrotor UAV for Wind Profile Characterization. Master’s Thesis, Universidad Carlos III de Madrid, Madrid, Spain, 2013. [Google Scholar]
- Witte, B.M.; Singler, R.F.; Bailey, S.C. Development of an Unmanned Aerial Vehicle for the Measurement of Turbulence in the Atmospheric Boundary Layer. Atmosphere 2017, 8, 195. [Google Scholar] [CrossRef]
- González-Rocha, J.; Woolsey, C.A.; Cornel, S.; De Wekker, S.F.J. Sensing Wind from Quadrotor Motion. J. Guid. Control Dyn. 2018. Preprint. [Google Scholar]
- Shadden, S.C.; Lekien, F.; Marsden, J.E. Definition and properties of Lagrangian coherent structures from finite-time Lyapunov exponents in two-dimensional aperiodic flows. Phys. D Nonlinear Phenom. 2005, 212, 271–304. [Google Scholar] [CrossRef]
- Schindler, B.; Peikert, R.; Fuchs, R.; Theisel, H. Ridge concepts for the visualization of Lagrangian coherent structures. In Topological Methods in Data Analysis and Visualization II; Springer: Berlin/Heidelberg, Germany, 2012; pp. 221–235. [Google Scholar]
- Senatore, C.; Ross, S.D. Detection and characterization of transport barriers in complex flows via ridge extraction of the finite time Lyapunov exponent field. Int. J. Numer. Methods Eng. 2011, 86, 1163–1174. [Google Scholar] [CrossRef]
- Tallapragada, P.; Ross, S.D.; Schmale, D.G. Lagrangian Coherent Structures Are Associated with Fluctuations in Airborne Microbial Populations. Chaos 2011, 21, 033122. [Google Scholar] [CrossRef] [PubMed]
- Tallapragada, P.; Ross, S.D. A set oriented definition of finite-time Lyapunov exponents and coherent sets. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 1106–1126. [Google Scholar] [CrossRef]
- BozorgMagham, A.E.; Ross, S.D.; Schmale, D.G., III. Real-time prediction of atmospheric Lagrangian coherent structures based on forecast data: An application and error analysis. Phys. D Nonlinear Phenom. 2013, 258, 47–60. [Google Scholar] [CrossRef]
- BozorgMagham, A.E.; Ross, S.D.; Schmale, D.G., III. Local finite-time Lyapunov exponent, local sampling and probabilistic source and destination regions. Nonlinear Process. Geophys. 2015, 22, 663–677. [Google Scholar] [CrossRef]
- BozorgMagham, A.E.; Ross, S.D. Atmospheric Lagrangian coherent structures considering unresolved turbulence and forecast uncertainty. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 964–979. [Google Scholar] [CrossRef]
- Nave, G.K., Jr.; Nolan, P.J.; Ross, S.D. Trajectory-free approximation of phase space structures using the trajectory divergence rate. arXiv, 2018; arXiv:1705.07949. [Google Scholar]
- Serra, M.; Haller, G. Objective Eulerian coherent structures. Chaos 2016, 26, 053110. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nolan, P.J.; Ross, S.D. Finite-Time Lyapunov Exponent Field in the Infinitesimal Time Limit. viXra, 2018; viXra:1810.0023. [Google Scholar]
- Skamarock, W.; Klemp, J.; Dudhia, J.; Gill, D.; Barker, D.; Wang, W.; Powers, J. A Description of the Advanced Research WRF Version 3, NCAR Technical Note TN-475+STR. 2008. Available online: http://opensky.ucar.edu/islandora/object/technotes%3A500/datastream/PDF/view (accessed on 15 December 2018).
- Skamarock, W.C.; Klemp, J.B. A time-split nonhydrostatic atmospheric model for weather research and forecasting applications. J. Comput. Phys. 2008, 227, 3465–3485. [Google Scholar] [CrossRef]
- Muñoz-Esparza, D.; Sharman, R.; Sauer, J.; Kosović, B. Toward Low-Level Turbulence Forecasting at Eddy-Resolving Scales. Geophys. Res. Lett. 2018, 45, 8655–8664. [Google Scholar] [CrossRef]
- Zhou, B.; Simon, J.S.; Chow, F.K. The convective boundary layer in the terra incognita. J. Atmos. Sci. 2014, 71, 2545–2563. [Google Scholar] [CrossRef]
- Lilly, K. On the Application of the Eddy Viscosity Concept in the Inertial Sub-Range of Turbulence. Available online: http://dx.doi.org/10.5065/D67H1GGQ (accessed on 15 September 2018).
- Benjamin, S.G.; Weygandt, S.S.; Brown, J.M.; Hu, M.; Alexander, C.R.; Smirnova, T.G.; Olson, J.B.; James, E.P.; Dowell, D.C.; Grell, G.A.; et al. A North American hourly assimilation and model forecast cycle: The Rapid Refresh. Mon. Weather Rev. 2016, 144, 1669–1694. [Google Scholar] [CrossRef]
- Peacock, T.; Haller, G. Lagrangian coherent structures: The hidden skeleton of fluid flows. Phys. Today 2013, 66, 41–47. [Google Scholar] [CrossRef]
- Schmale, D.; Ross, S. Highways in the Sky: Scales of Atmospheric Transport of Plant Pathogens. Annu. Rev. Phytopathol. 2015, 53, 591–611. [Google Scholar] [CrossRef] [PubMed]
- Schmale, D.G.; Ross, S.D. High-flying microbes: Aerial drones and chaos theory help researchers explore the many ways that microorganisms spread havoc around the world. Sci. Am. 2017, 316, 32–37. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Package | Description of Operation | Date | Time Start | Time End | Height | Location | Lat | Long |
|---|---|---|---|---|---|---|---|---|
| UAS_A2 | Calibration flight w/MURC. | 14 July 2018 | 13:30:21 | 13:41:05 | 15 | MURC Tower | 37.781914 | −106.041412 |
| UAS_A4 | Coordinated flight w/ B4 | 14 July 2018 | 16:43:07 | 16:54:55 | 10 | East Runway | 37.780315 | −106.040772 |
| UAS_A5 | Coordinated flight w/ B5 | 14 July 2018 | 17:15:58 | 17:27:19 | 10 | East Runway | 37.780312 | −106.040763 |
| UAS_A16 | Coordinated flight w/ B7 | 16 July 2018 | 14:42:07 | 14:53:04 | 15 | East Runway | 37.780308 | −106.040753 |
| UAS_A17 | Coordinated flight w/ B8 | 16 July 2018 | 15:18:01 | 15:28:17 | 15 | East Runway | 37.780336 | −106.040746 |
| UAS_A22 | Coordinated flight w/ B9 | 17 July 2018 | 12:36:00 | 12:47:24 | 15 | East Runway | 37.780287 | −106.04076 |
| UAS_A23 | Coordinated flight w/ B10 | 17 July 2018 | 13:59:29 | 14:10:59 | 15 | East Runway | 37.780307 | −106.040763 |
| UAS_A25 | Coordinated flight w/ B11 | 17 July 2018 | 15:07:39 | 15:19:02 | 15 | East Runway | 37.780398 | −106.040762 |
| UAS_A26 | Coordinated flight w/ B12 | 17 July 2018 | 15:41:53 | 15:53:11 | 15 | East Runway | 37.780338 | −106.040762 |
| UAS_B1 | Calibration flight w/ Flux Tower. | 13 July 2018 | 15:15:07 | 15:25:27 | 10 | Above UK WS | 37.781644 | −106.039170 |
| UAS_B2 | Calibration flight w/ MURC. | 14 July 2018 | 14:15:23 | 14:26:07 | 15 | MURC Tower | 37.78188077 | −106.0414296 |
| UAS_B4 | Coordinated flight w/ A4 | 14 July 2018 | 16:42:10 | 16:52:40 | 10 | West Runway | 37.78155488 | −106.0422978 |
| UAS_B5 | Coordinated flight w/ A5 | 14 July 2018 | 17:15:27 | 17:26:28 | 10 | West Runway | 37.7815583 | −106.0422984 |
| UAS_B7 | Coordinated flight w/ A16 | 16 July 2018 | 14:43:05 | 14:52:42 | 18 | West Runway | 37.78156695 | −106.0422614 |
| UAS_B8 | Coordinated flight w/ A17 | 16 July 2018 | 15:16:17 | 15:27:48 | 9 | West Runway | 37.78158549 | −106.0422597 |
| UAS_B9 | Coordinated flight w/ A22 | 17 July 2018 | 12:35:22 | 12:46:56 | 15 | West Runway | 37.78153018 | −106.0422848 |
| UAS_B10 | Coordinated flight w/ A23 | 17 July 2018 | 13:58:58 | 14:10:31 | 15 | West Runway | 37.78155617 | −106.0422905 |
| UAS_B11 | Coordinated flight w/ A25 | 17 July 2018 | 15:07:12 | 15:18:49 | 15 | West Runway | 37.78156052 | −106.0422956 |
| UAS_B12 | Coordinated flight w/ A26 | 17 July 2018 | 15:41:12 | 15:52:55 | 15 | West Runway | 37.78156436 | −106.0422941 |
| Ground1 | 13 July 2018 | 11:45:00 | 15:55:00 | 4 | On Flux Tower | 37.781644 | −106.03917 | |
| Ground2 | 14 July 2018 | 8:00:00 | 18:30:00 | 4 | On Flux Tower | 37.781644 | −106.03917 | |
| Ground3 | 15 July 2018 | 11:00:00 | 14:45:00 | 4 | On Flux Tower | 37.781644 | −106.03917 | |
| Ground4 | 16 July 2018 | 8:40:00 | 15:35:00 | 15 | On MURC Tower | 37.782097 | −106.041412 | |
| Ground5 | 17 July 2018 | 8:15:00 | 16:00:00 | 15 | On MURC Tower | 37.782005 | −106.041504 |
| 15m_Tower_MURC_3Dsonic | 15m_Tower_Atmos22 | 15m_UAS_A_Atmos22 | 15m_UAS_B_Atmos22 | |
|---|---|---|---|---|
| 15m_Tower_MURC_3Dsonic | – | 0.970 | 0.876 | 0.914 |
| 15m_Tower_Atmos22 | – | 0.868 | 0.895 | |
| 15m_UAS_A_Atmos22 | – | 0.868 | ||
| 15m_UAS_B_Atmos22 | – |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nolan, P.J.; Pinto, J.; González-Rocha, J.; Jensen, A.; Vezzi, C.N.; Bailey, S.C.C.; De Boer, G.; Diehl, C.; Laurence, R., III; Powers, C.W.; et al. Coordinated Unmanned Aircraft System (UAS) and Ground-Based Weather Measurements to Predict Lagrangian Coherent Structures (LCSs). Sensors 2018, 18, 4448. https://doi.org/10.3390/s18124448
Nolan PJ, Pinto J, González-Rocha J, Jensen A, Vezzi CN, Bailey SCC, De Boer G, Diehl C, Laurence R III, Powers CW, et al. Coordinated Unmanned Aircraft System (UAS) and Ground-Based Weather Measurements to Predict Lagrangian Coherent Structures (LCSs). Sensors. 2018; 18(12):4448. https://doi.org/10.3390/s18124448
Chicago/Turabian StyleNolan, Peter J., James Pinto, Javier González-Rocha, Anders Jensen, Christina N. Vezzi, Sean C. C. Bailey, Gijs De Boer, Constantin Diehl, Roger Laurence, III, Craig W. Powers, and et al. 2018. "Coordinated Unmanned Aircraft System (UAS) and Ground-Based Weather Measurements to Predict Lagrangian Coherent Structures (LCSs)" Sensors 18, no. 12: 4448. https://doi.org/10.3390/s18124448