3.2.1. Proposed RAP 1
RAP 1 is generated using a prime-length
ZC sequence with a root index
uc where the ID of a UE,
c, is mapped. RAP 1 of sequence length
NZC is defined in the discrete-time domain as follows:
The
ZC sequence,
xu(
n), with a root index
u and rectangle function,
q(
n), are defined as:
Here, the length of ZC sequence is chosen as a prime number because it maximizes the number of root indices, thus achieving good correlation property.
In order to analyze the properties of the proposed RAP in terms of time delay and Doppler shift, its AF is analyzed. The AF of RAP 1 with ID
c is given in the discrete-time domain as follows:
where
ε = fDτ. Here,
fD and
τ denote the Doppler shift and duration of RAP, respectively. Furthermore,
amod
b denotes the remainder of division and sinc(
x) denotes the normalized sinc function (=sin(
πx)/
πx). Further,
. For |
n| ≥
NZC,
. As shown in (5), the magnitude at the origin (
n0 = 0,
ε = 0) is one. For a small value of
ε (compared with
NZC), the magnitude of AF at the correct timing can be approximated as
, which is a sinc function of
ε. This result signifies that the magnitude at the correct timing decreases as the Doppler shift increases. It becomes zero when the value of
fDτ is an integer number. Therefore, the magnitude of AF at the correct timing decreases significantly when the Doppler shift is large. The position of side peaks, which may contribute to the RAP detection with a large timing error, can also be predicted using (5). The position (
ni) of the
i-th (
) significant side peak can be obtained as
niuc ≈
αiNZC (−
NZC <
ni <
NZC), i.e., the side peak occurs at
ni when the product of
ni and
uc is given by an integer value close to the product of the sequence length and an arbitrary integer value
αi. The maximum value of side peak occurs when (
niuc +
ε)mod
NZC = 0, with the value of
ρZC(
ni) at
ni. The term (
niuc +
ε)mod
NZC becomes zero only when
ε is a non-zero integer value. For example, if
uc = 5, side peaks occur at
n1 = ±100 and
n2 = ±200 because 100 × 5 = 500 and 200 × 5 = 1000 are the closest integer values to 499 and 998, respectively. The maximum values of side peak occur when the values of
ε are equal to −1 and −2, because (500−1)mod499 = 0 and (1000−2)mod499 = 0, respectively. In this case,
ρZC(100) = 0.8 and
ρZC(200) = 0.6.
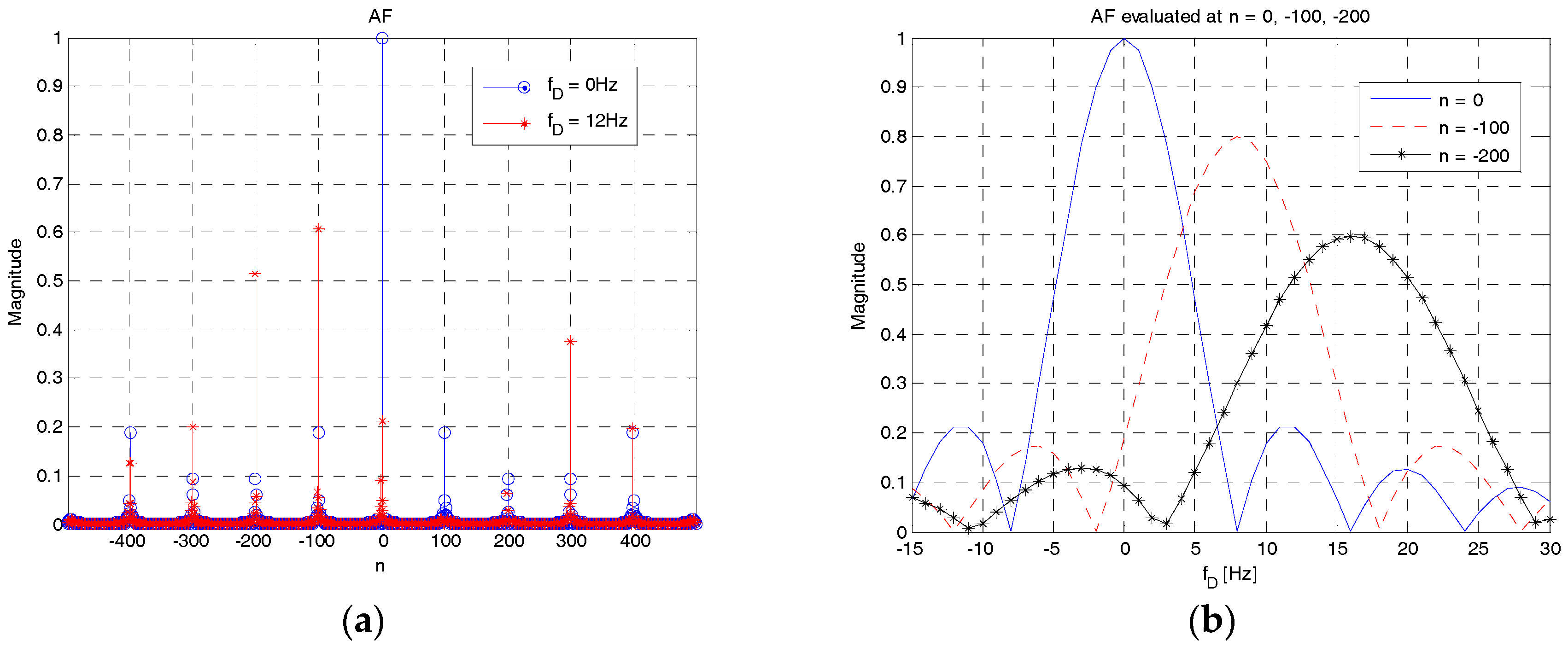
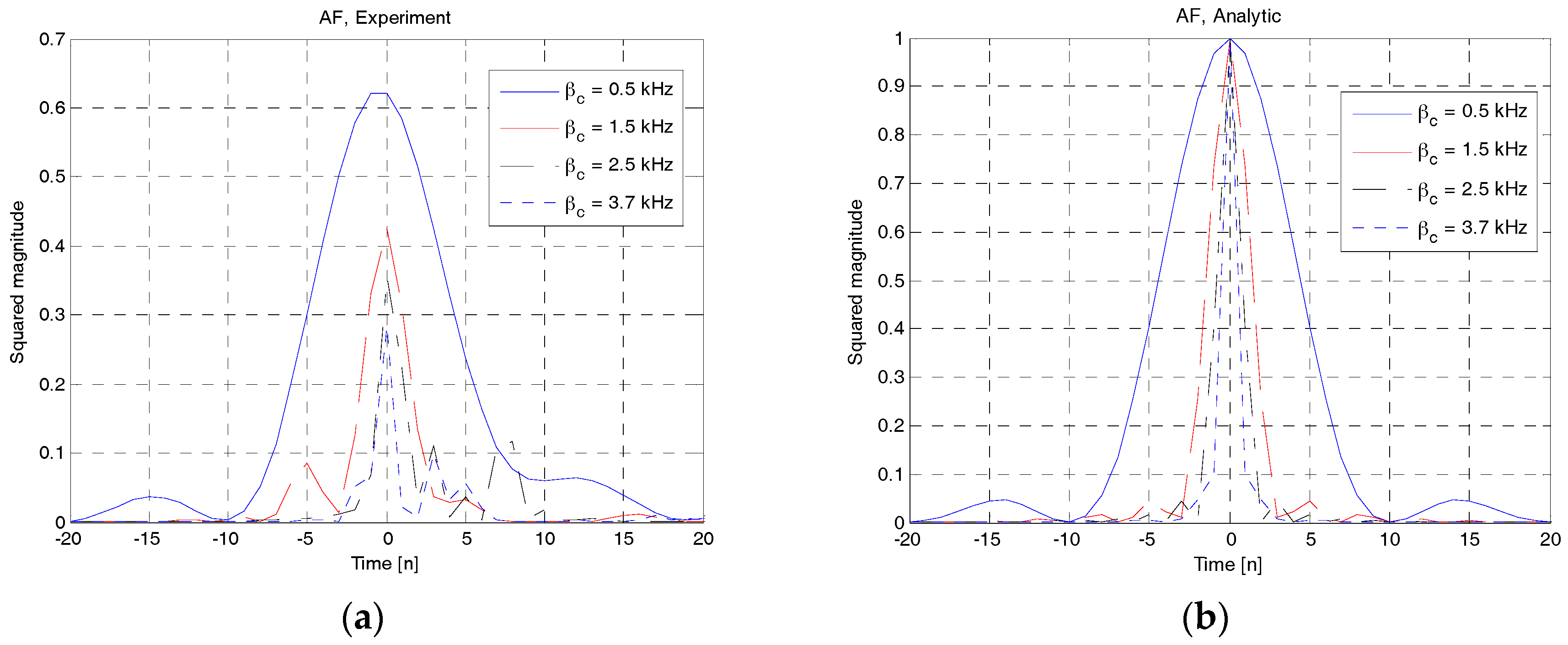
Figure 6 shows the AF of RAP 1 with a root index of 5 as a function of time delay (
Figure 6a) and Doppler shift (
Figure 6b). As shown in
Figure 6a, the magnitude of AF is 1 at the correct timing (
n = 0) and decreases in a sinc pattern as
n increases or decreases, when the Doppler shift is 0 (circle). Significant side peaks occur at
when the Doppler shift is 12 Hz (star). When
fD = 0 Hz, the magnitudes of side peaks are smaller than 0.2. However, when
fD = 12 Hz, the magnitude at the correct timing is reduced to approximately 0.2 and the side peaks become larger, leading to RAP detection with a large timing error.
Figure 6b shows the behavior of AF evaluated at three different time indices, n = {0, −100, −200}, when the Doppler shift varies. As shown in this figure,
,
and
have sinc shapes decreasing from the maximum values of 1, 0.8, and 0.6, respectively. The largest magnitudes of
and
occur at the first and second nulling points in
, i.e., at the Doppler shifts of 8 Hz and 18 Hz, respectively. The cross-over point between
and
occurs near the Doppler shift of 4.13 Hz, with the magnitude of 0.61. Notably, the magnitudes of other side peaks including the peak at the correct timing are less than 0.2 when the Doppler shift is 4.13 Hz.
These simulation results confirm that RAP 1 is sensitive to Doppler shift; the magnitude of AF at the correct timing is reduced and side peaks increase in a Doppler environment. From this result, it can also be concluded that the approach widely used in LTE-based systems to increase the number of RAPs, i.e., cyclic-shifting a ZC sequence, is not suitable for carrying the IDs of different UEs in underwater acoustic cellular systems owing to high auto-correlation in RAP 1 in a Doppler environment.
Subsequently, in order to analyze the cross-correlation properties of the proposed RAPs with the different IDs of UEs under the effect of time delay and Doppler shift, the definition of AF is extended to CAF in this paper. The discrete-time CAF of RAP 1 with two different root indices,
uc and
ud, is defined as:
where
ucd =
uc −
ud. Unlike the AF of RAP 1 in (5), a closed-form expression of (6) cannot be derived for the general values of Doppler shift and
n. However, when
ε is an integer value (
εI), the CAF of RAP 1 can be derived as follows:
where
denotes the multiplicative inverse of
ucd. Further,
η = (
NZC + 1)/2 and
ϑ = (
NZC − 1)/2. The Gauss sum expression,
G(
a,N), in (7) is given by:
where (
a/N) denotes the Legendre symbol with the value of {−1, 0, 1} and
.
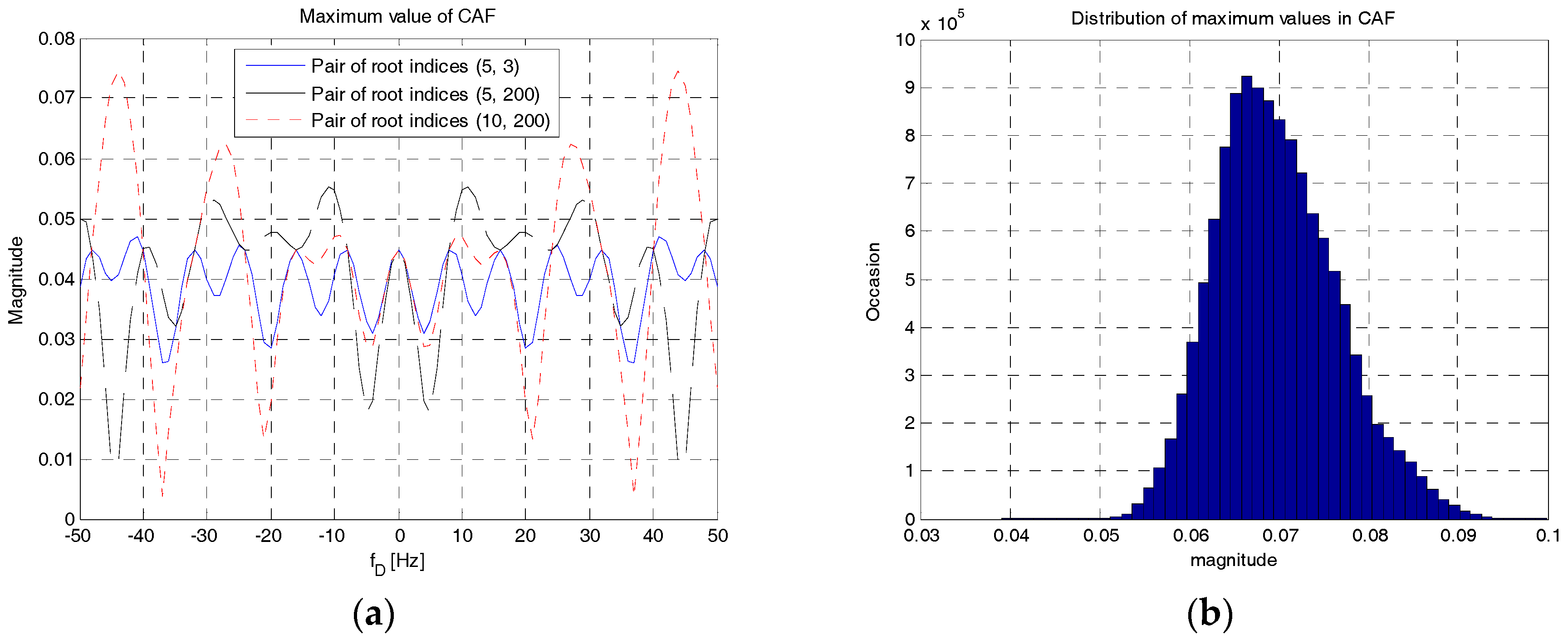
Figure 7 shows the maximum value of the CAF of RAP 1. In
Figure 7a, three pairs of root indices, (5, 3), (5, 200), and (10, 200), are used for the design of RAP 1 and the Doppler shift is changed from −50 Hz to 50 Hz. As shown in this figure, a pair of odd and prime root indices, (3, 5), achieves smaller variation in magnitude. A pair of even root indices, (10, 200), produces higher variation in magnitude. For
, the ranges of variation are [0.027, 0.047], [0.01, 0.05], and [0.05, 0.075] when the pairs of root indices, (3, 5), (5, 200), and (10, 200) are used, respectively. However, the ranges of variation are smaller than 0.1 (10%).
Figure 7b shows the distribution of the maximum magnitudes evaluated with RAPs by changing the value of the Doppler shift from −50 Hz to 50 Hz with a step size of 1 Hz and the values of root indices of
uc and
ud for all possible combinations. As shown in
Figure 7b, the maximum magnitude of CAF is concentrated around 0.07 (7%). Therefore, it is possible to use any root indices in RAP 1 with a cross-correlation level less than 0.1 even in high Doppler environments.
3.2.2. Proposed RAP 2
RAP 2 is generated using a Doppler-insensitive waveform, i.e., the LFM waveform. The information on the ID of a UE is mapped to the parameters of LFM waveform: frequency shift parameter,
f, and frequency sweeping parameter,
β. RAP 2 for UE
c is generated in the continuous-time domain with a symbol duration,
τ, as follows:
where
B denotes the operational channel bandwidth (4 KHz in UL 0). The LFM waveform,
xτ(
f,
β,
t) and rectangular pulse,
pτ(
t), are defined as follows:
The AF of RAP 2 with the ID of UE,
c, is given as follows:
where
. The derivation of (11) is given in the Appendix. As evident from (11), the magnitude of
varies depending on
τ,
fD and
βc [
16]. However, the parameter
fc does not affect the magnitude of AF. Further, we analyze the effect of AF in (11) on
fD and
βc with the symbol duration being fixed to 125 ms.
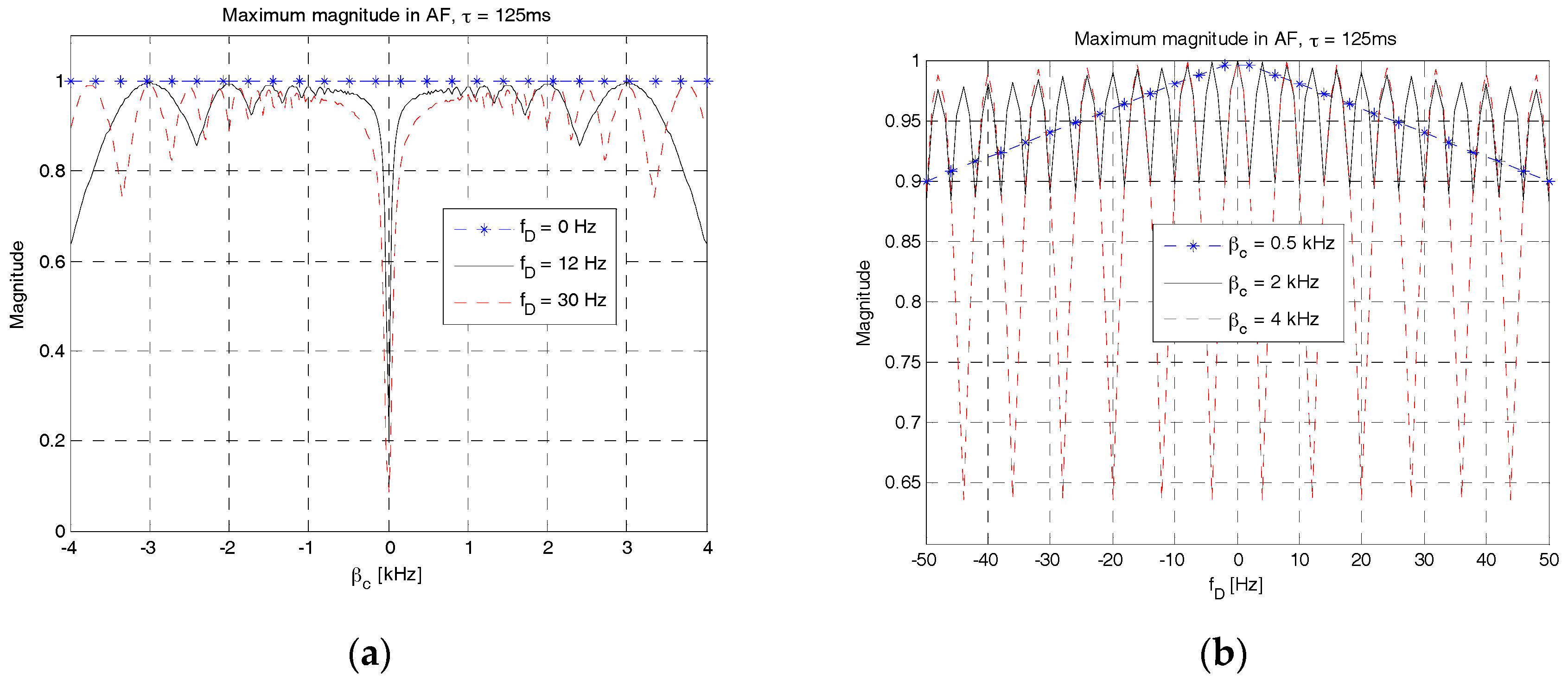
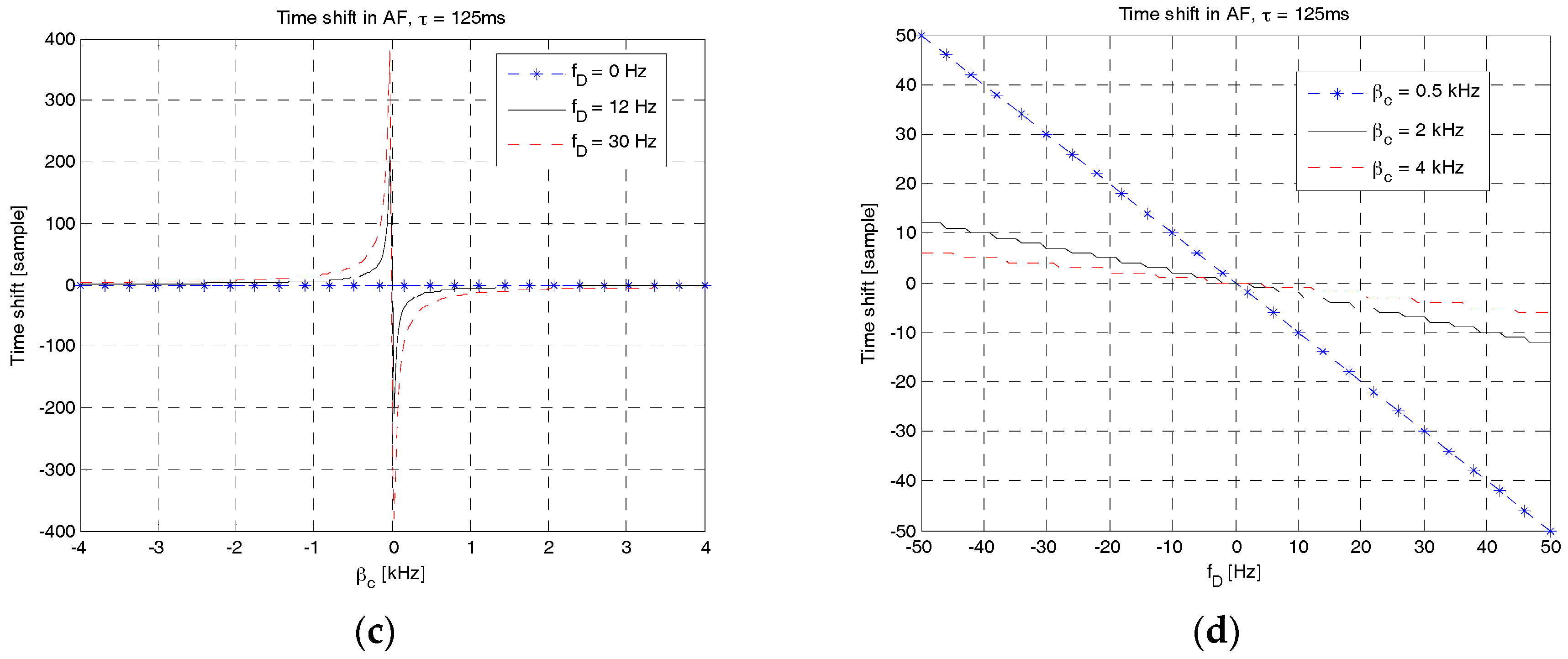
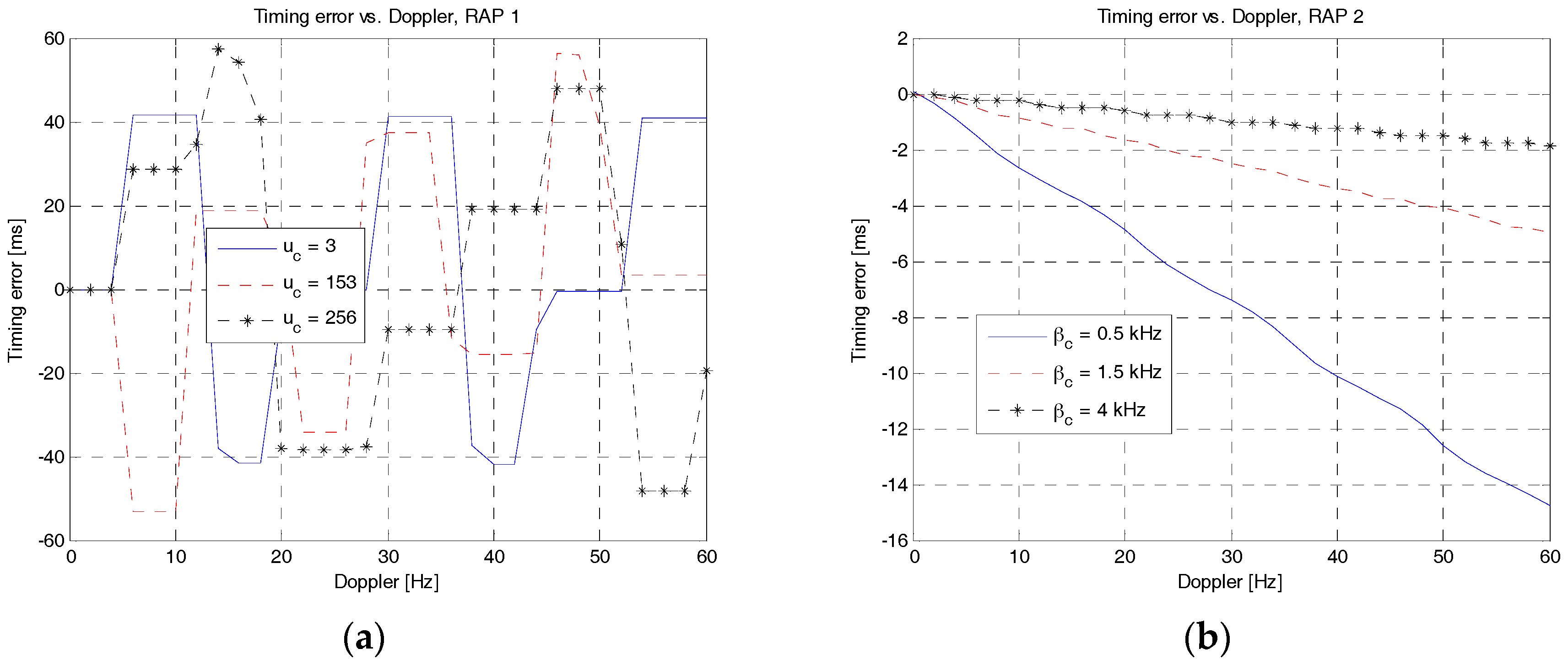
Figure 8 shows the maximum magnitudes and corresponding time shifts of AF in
βc and
fD domains.
Figure 8a,c show the maximum magnitudes and corresponding time shifts of AF in
βc domain for three different values of the Doppler shift, i.e., 0 Hz, 12 Hz and 30 Hz. As shown in these figures, there is no variation in both the magnitude (all 1 s) and time shift (all 0 s) when
fD = 0 Hz. However, magnitude and time shift vary when there is a Doppler shift. The degree of variation is significant especially at a small value of
βc. It can be observed that, when
βc = 0 Hz and
fD = 30 Hz, the maximum value becomes smaller than 0.2 and the absolute value of time shift increases up to 480 samples. With a sampling rate of 4 kHz, the timing error of 480 samples corresponds to 180 m in the sound speed of 1500 m/s. In order to obtain a high detection probability of RAP with a small timing error, the value of
βc should be selected such that high magnitude and small time shift of AF can be achieved. From these figures, the smallest value of
βc (denoted as
β0), i.e., 0.5 kHz, is selected and used in the following simulations.
Figure 8b,d show the maximum value and corresponding time shifts of AF in
fD domain for three different values of
βc, i.e., 0.5 kHz, 2 kHz and 4 kHz. As shown in
Figure 8b, the maximum value decreases slowly in a triangular manner when
βc = 0.5 kHz, and fluctuates fast when
βc = {2, 4} kHz. However, the time shift varies in a reverse manner as shown in
Figure 8d. The time shift in the case of
βc = 0.5 kHz increases faster than that in the cases of 2 kHz and 4 kHz. At the Doppler shift of 50 Hz, the time shift is 50, 12, and 6 samples when the value of
βc is 0.5 kHz, 2 kHz, and 4 kHz, respectively. In summary, RAP 2 is robust to Doppler shifts as long as the frequency sweeping parameter is set to be greater than
β0. The time shift decreases in a Doppler environment as the frequency sweeping parameter increases.
Subsequently, to analyze the cross-correlation properties of the proposed RAP 2 with different IDs of UEs under the effect of time delay and Doppler shift, the CAF of RAP 2 with IDs
c and
d is defined as:
where
, and
The derivation of (12) is given in the appendix. When
βc =
βd, the CAF of RAP 2 can be derived as:
Since (14) can be viewed as a shifted version of a sinc function, the time shift,
, and the corresponding peak value,
, are expressed as follows:
when
βc is fixed, the time shift increases proportionally with the values of
fc,
fd, and
fD. Moreover, the peak value decreases as the time shift increases. Further, (15) signifies that the time shift should be larger than the symbol duration to avoid time ambiguity, which may lead to false detection, i.e.:
From (9) and (16), we can obtain the condition of Δ
f that does not produce time ambiguity, assuming that Δ
f is much larger than
fD, as follows:
The condition in (17) is satisfied for all the values of βc less than B/3. If βc is larger than B/3, only one RAP can be generated with βc. Otherwise, time ambiguity will occur. For example, when Δf = βc = 0.5 kHz, we can generate seven RAPs with from a single value of the frequency sweeping parameter. In this case, the frequency of RAP after sweeping stays within the channel bandwidth and time ambiguity does not occur.
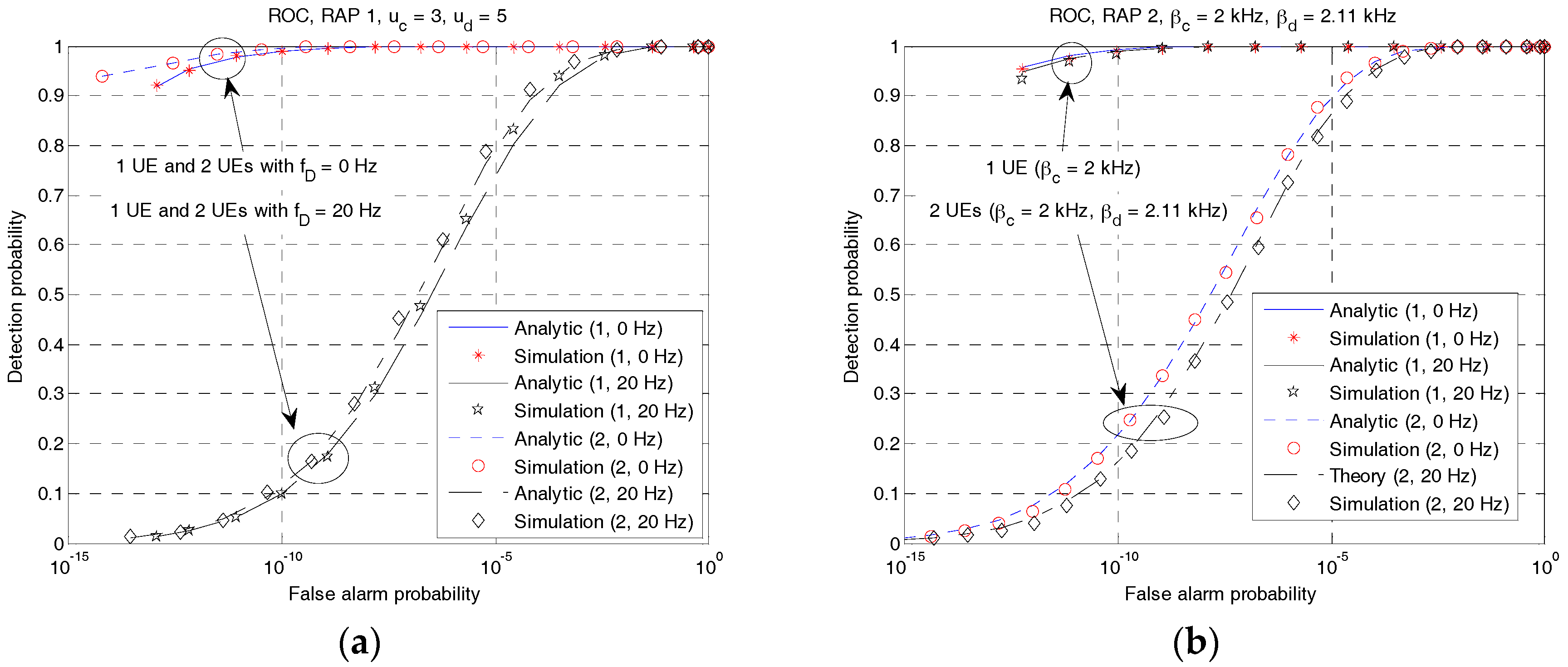
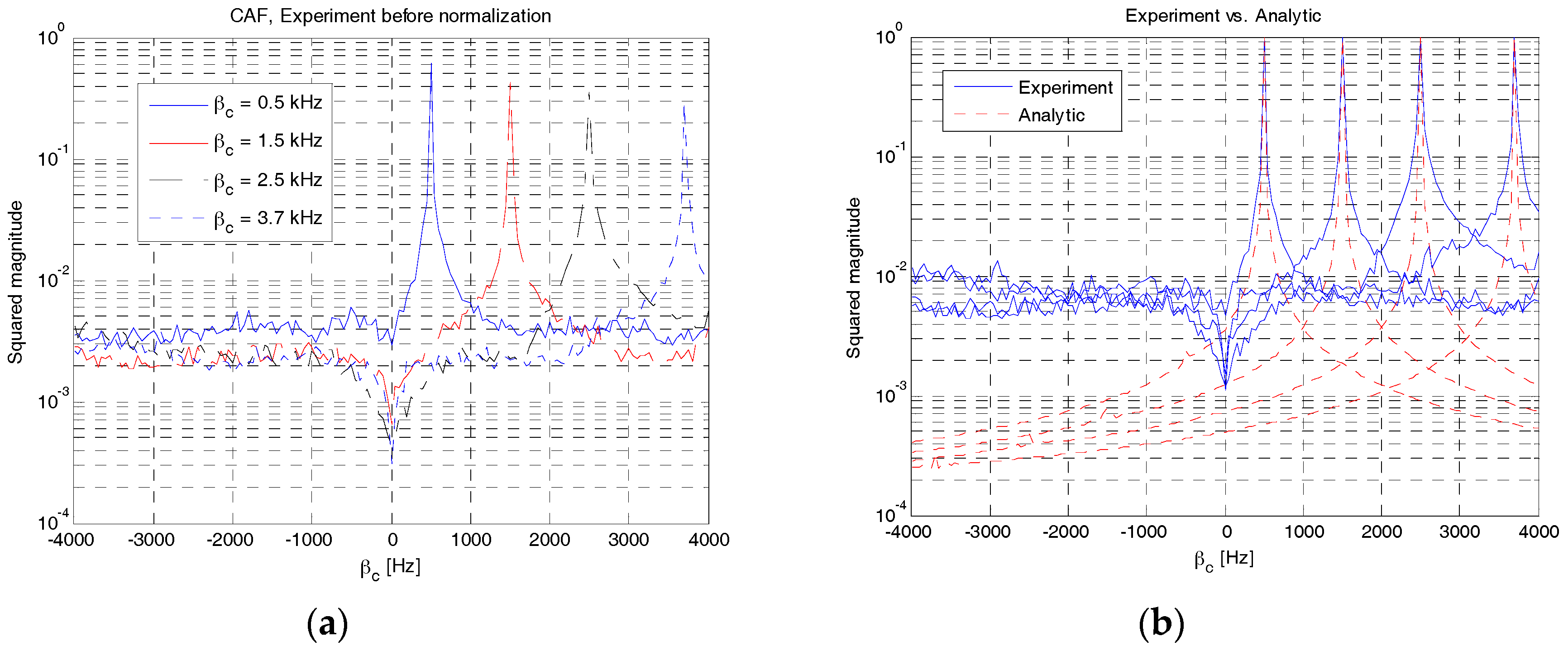
In
Figure 9, the analytical solutions in (12) and (14) are compared with the simulation results when
fD = 0 Hz. The analytical solution in (12) is obtained by numerical evaluation of Fresnel integral whereas the simulation results are obtained through a direct cross-correlation operation between the two LFM waveforms. As shown in this figure, the analytical solutions are consistent with the simulation results (almost indistinguishable).
Figure 9a shows the case of Δ
β ≠ 0.
Figure 9b shows a special case when Δ
β = 0 and Δ
f = 0. In this case, the highest peak occurs at the correct timing (
) because the two RAPs are generated using the same LFM waveform.
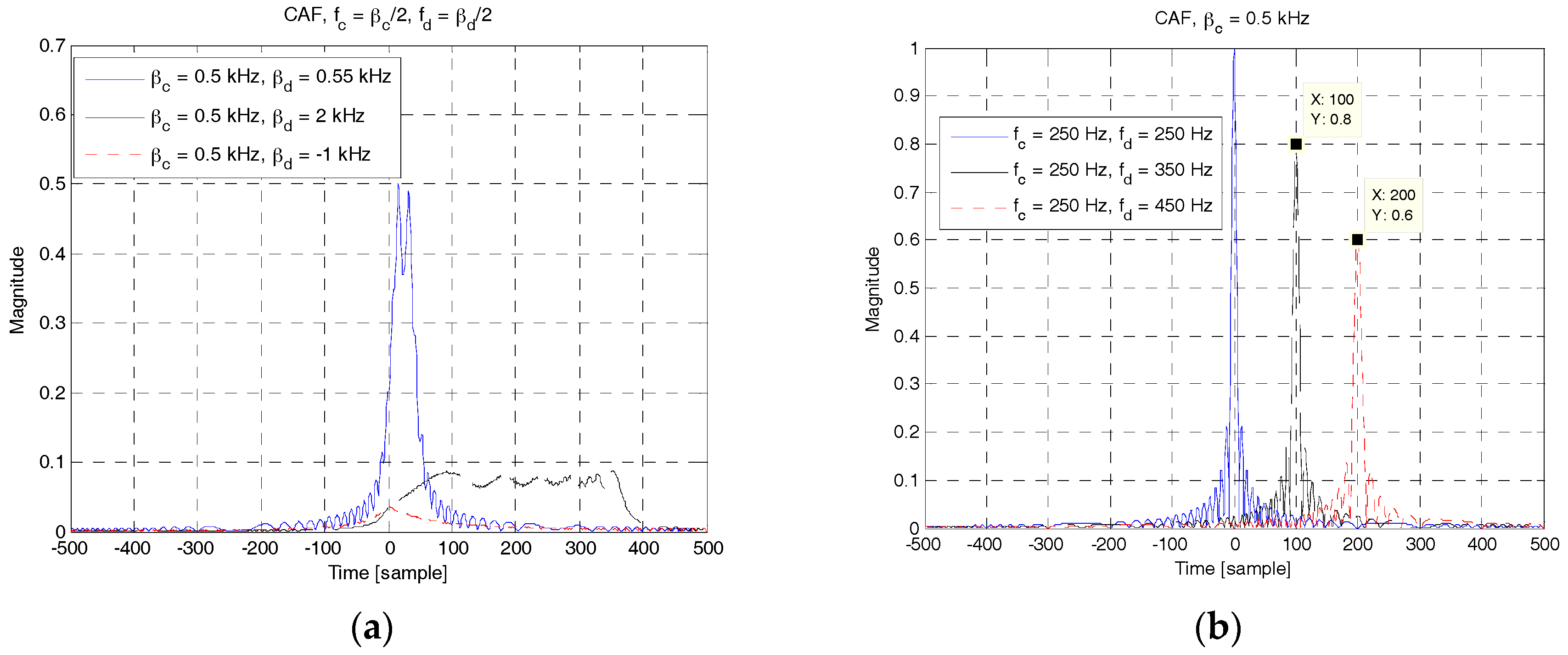
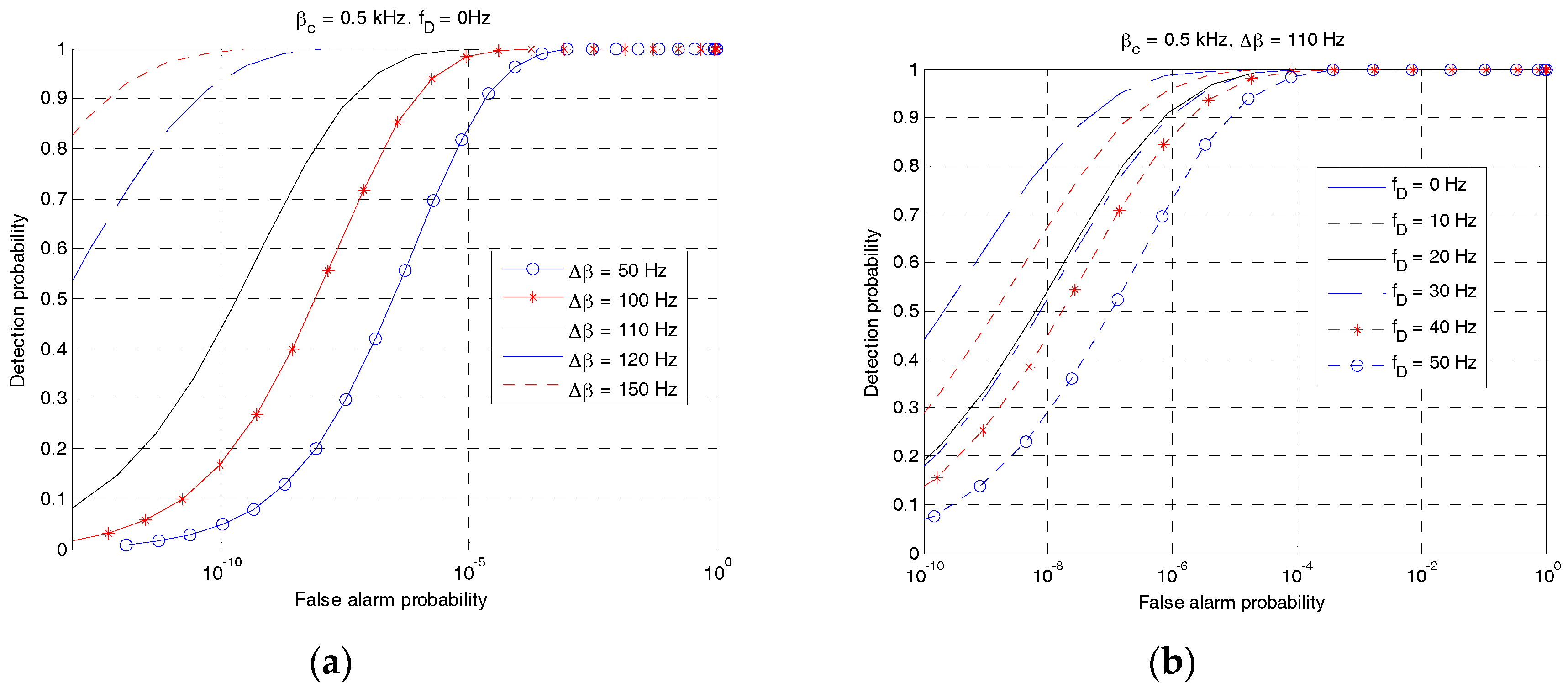
Figure 10 shows the CAFs of RAP 2 for different values of
βb and
fb. Further,
βc = 0.5 kHz and
fD = 0 Hz. In
Figure 10a, the analytical solution in (12) is plotted for three different values of
βb, i.e., 0.55 kHz, 2 kHz, and −1 kHz. As shown in this figure, the cross-correlation level decreases as Δ
β increases. In
Figure 10b, the analytical solution in (14) is plotted for three different values of Δ
f. As shown in this figure, there are two significant peaks other than the main peak at the origin. The two peaks occur when the two RAPs at
fb = 350 Hz (Δ
f = 100 Hz) and 450 Hz ((Δ
f = 200 Hz) are received and correlated with an RAP at 250 Hz. This may produce ambiguity in detecting the ID of the UE and time delay. The peak value and the corresponding time delay can be predicted using (15).
The value of Δ
β should be carefully chosen to have small correlation among RAPs while supporting a large number of RAPs. In order to determine the number of possible RAPs generated by the LFM waveform, we will derive the upper bound of CAF of RAP 2. Here, we define
αC and
αS as the maximum values of cosine and sine Fresnel integrals, respectively. Subsequently, we can obtain the following relationships:
From (18), we can obtain the upper bound of the CAF of RAP 2 as follows:
From (14), we can also obtain αS = 0.8948 and αC = 0.9775 by numerical evaluation of the Fresnel integral with a sampling rate of 4 kHz. As evident from (19), the upper bound value depends on neither the frequency shift fc nor the Doppler shift fD, indicating that the values of fc and fD do not have a significant impact on the magnitude of CAF. The symbol duration (τ) and separation value (Δβ) between βc and βd are crucial. The larger the value of Δβτ, the smaller the value of the upper bound. From (11), we can observe that the range of frequency sweeping parameter is the union of the negative set, SN, and positive set, SP, i.e., where SN = [−B, −β0] and SP = [β0, B]. As discussed in the AF of RAP 2, β0 denotes the smallest value of β that provides a good AF in term of time shift and maximum magnitude value.
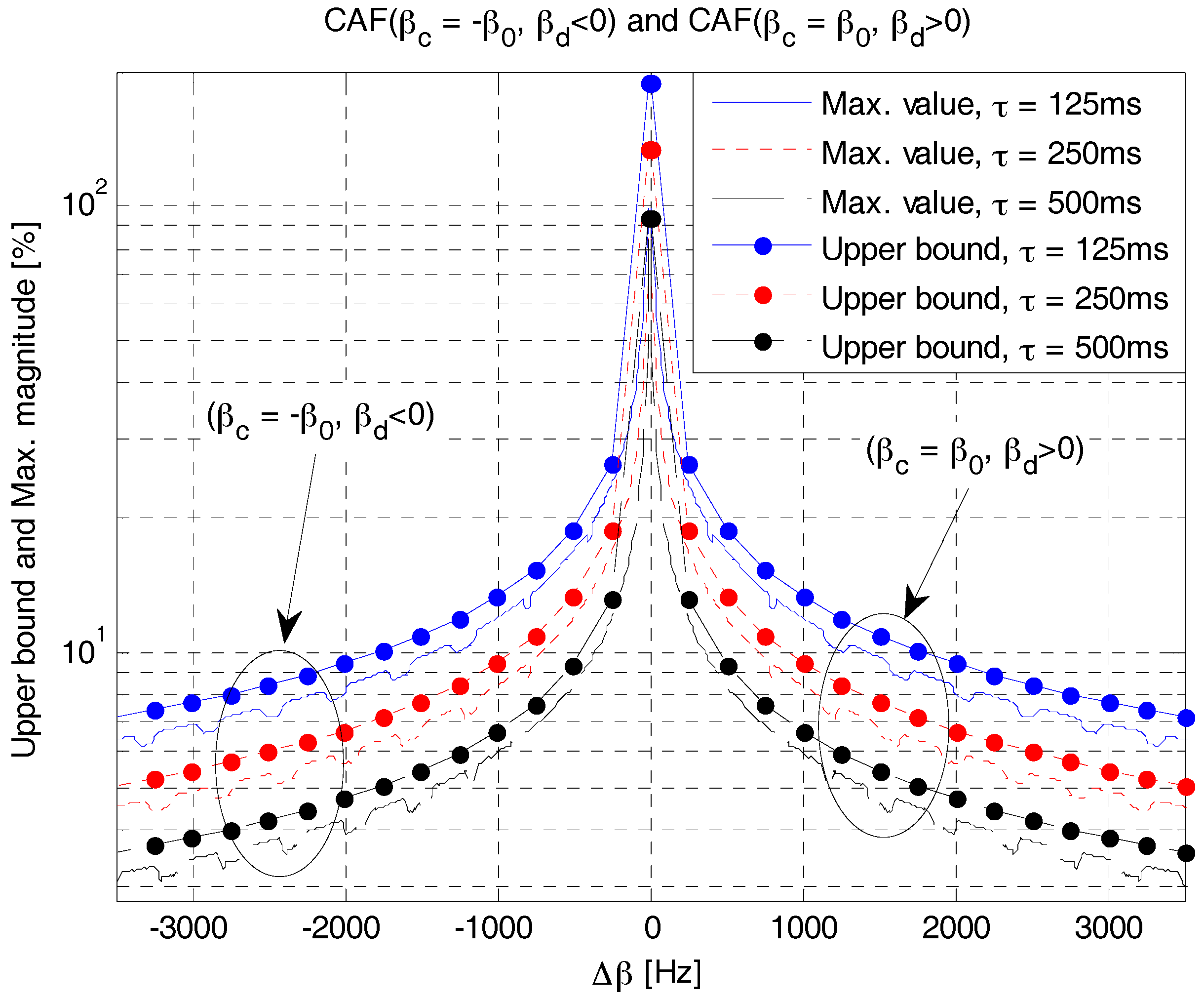
Figure 11 shows the upper bound given in (19) and the maximum value of CAF of RAP 2 obtained through simulation. Here,
β0 is set to 0.5 kHz and
βd(
βc + Δ
β) is a variable obtained by changing the value of Δ
β. As shown in the figure, the upper bound value decreases with the increase of
τ or Δ
β. The maximum value of CAF is slightly smaller than the upper bound and decreases with the increase of
τ or Δ
β. The upper bound value and maximum magnitude are symmetric about the origin because they both depend only on the parameters (Δ
β,
τ). On the positive side of Δ
β,
βc is set to
β0 and
βd is a variable selected from the set S
P, whereas
βc = −
β0 and
βd ∈ S
N on the negative side of Δ
β.
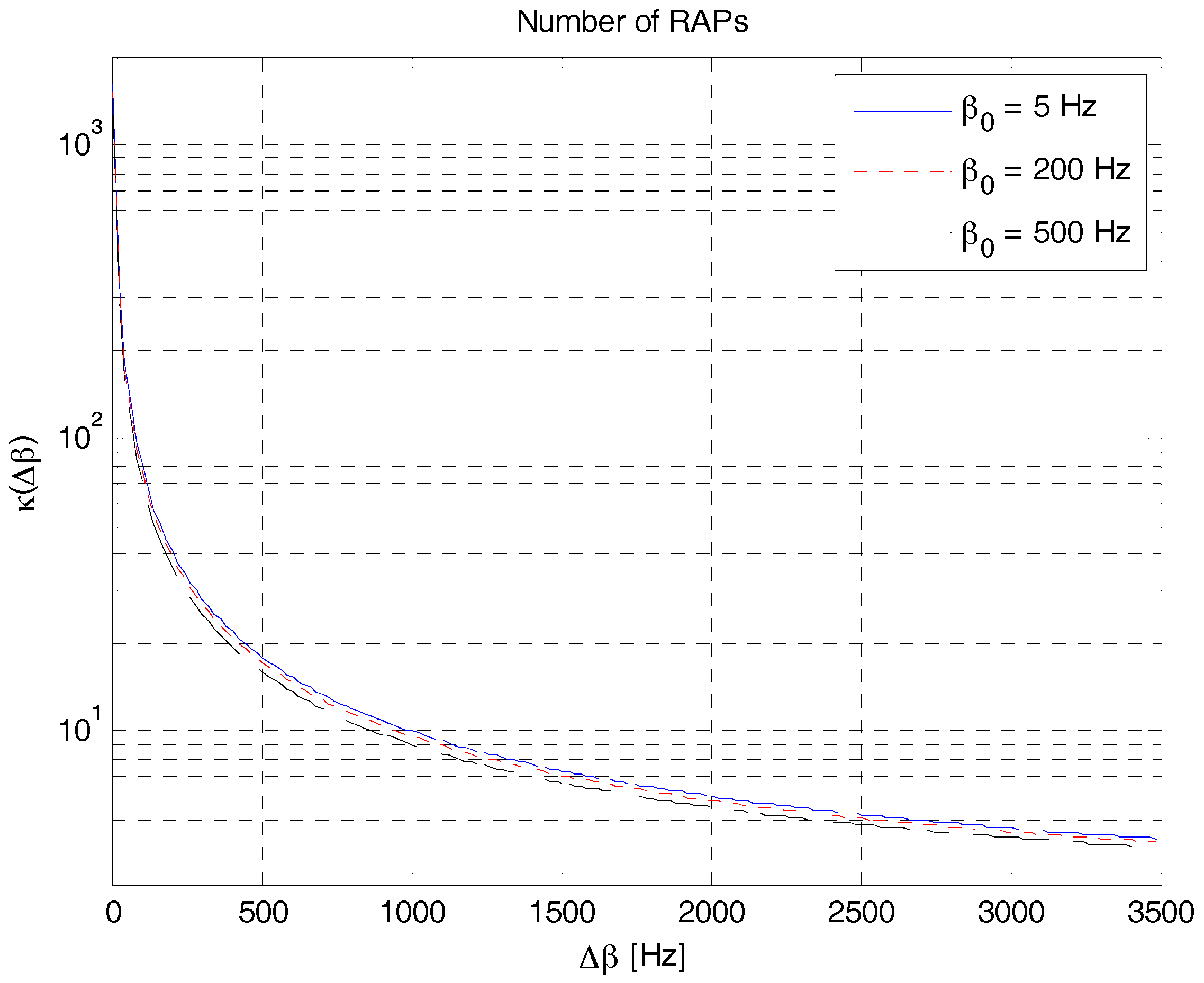
Figure 12 shows the number of possible RAPs in RAP 2, obtained using (20), when the value of Δ
β varies for three different values of
β0. As shown in this figure, the number of possible RAPs decreases with the increase of Δ
β. For example, the number of possible RAPs is approximately 16 when Δ
β is 0.5 kHz. In this case (Δ
β = 0.5 kHz), the maximum value of CAF can be obtained from
Figure 9 as 16%, 11%, and 7.5% for symbol durations of 125, 25 and 50 ms, respectively. Notably, the number of possible RAPs in (20) or
Figure 10 corresponds to the case where only Δ
β is considered. The number of RAPs increases when the frequency shift parameter is also considered. If we re-calculate the number of RAPs by considering Δ
f =
βc ≤
B/3 in (21) with the same value of
β0 (0.5 kHz), we can obtain eight additional RAPs. The first six RAPs are generated with
βc = 0.5 kHz and
, and the remaining two RAPs are generated with
βc = 1 kHz and
. In total, we can obtain 24 different RAPs when Δ
β = 0.5 kHz.
The number of RAPs that can be generated from an LFM waveform is given by:
where Δ
β can be determined from either
Figure 9 or the upper bound in (19) as follows:
In summary, the cross-correlation level in the CAF of RAP 2 varies depending on the selection of Δβ and τ. By increasing the values of Δβ and τ, we can reduce the cross-correlation level between the RAPs. However, the number of possible RAPs decreases with the increase of Δβ. Therefore, when RAP 2 is designed, there is a trade-off between the cross-correlation level and number of RAPs in selecting the value of Δβ.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















