Development of a Flexible Broadband Rayleigh Waves Comb Transducer with Nonequidistant Comb Interval for Defect Detection of Thick-Walled Pipelines


Abstract
:1. Introduction
2. Multiple Resonant Coupling Theory and Finite Element Optimized Broadband Transducer Array Element
2.1. Multimode Coupling Theory of Piezoelectric Materials
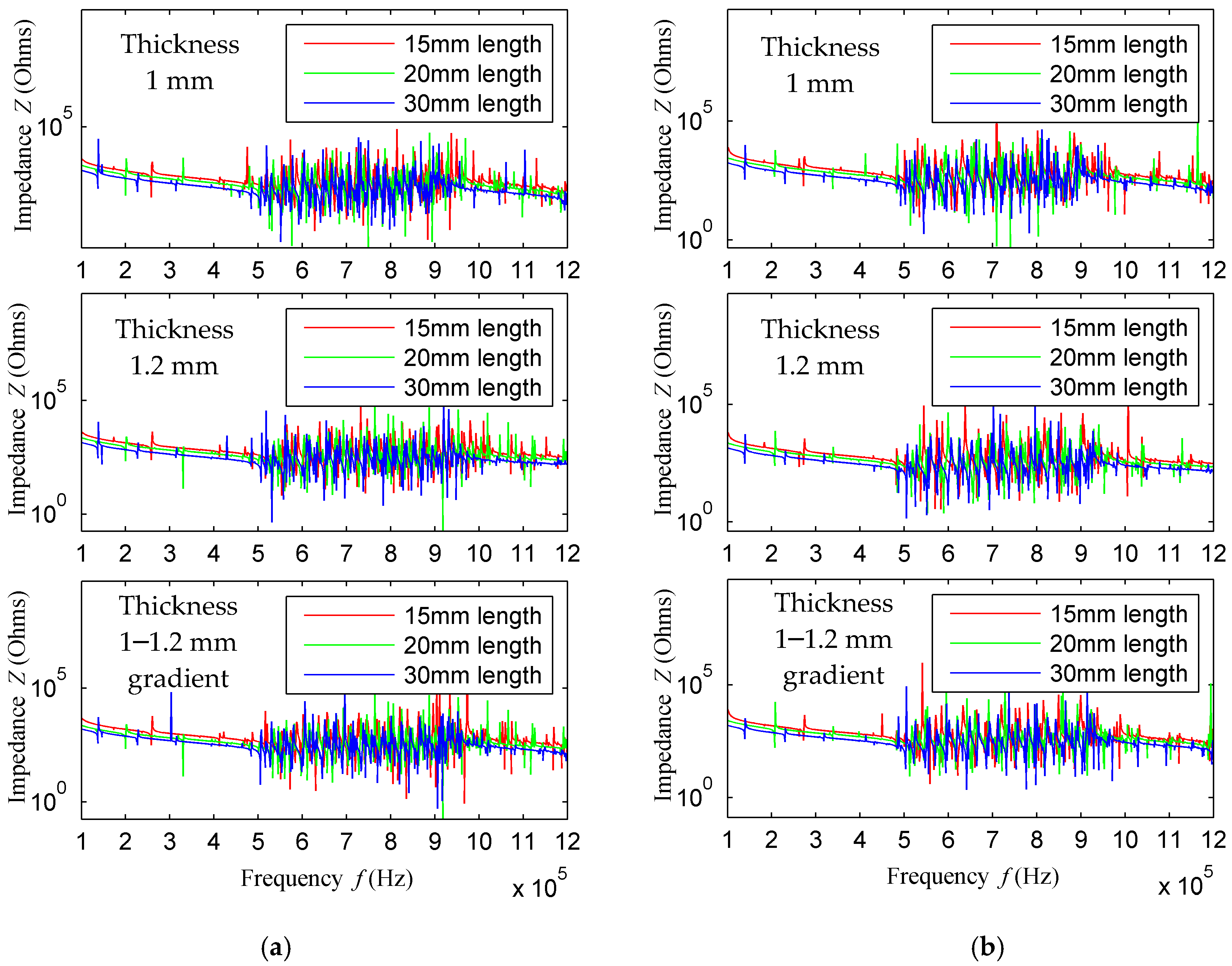
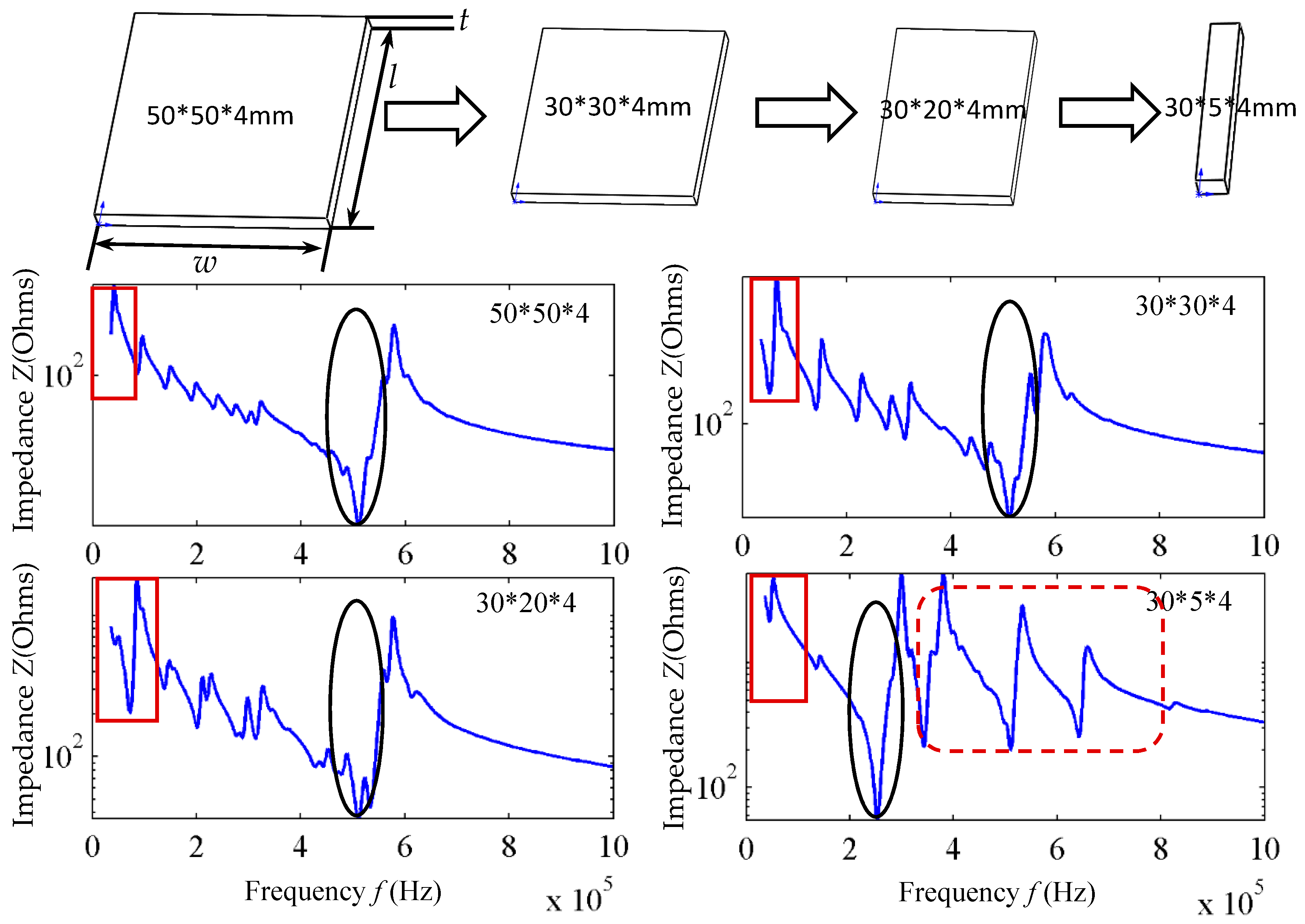
2.2. FEA Method to Optimize Array Element Length and Thickness
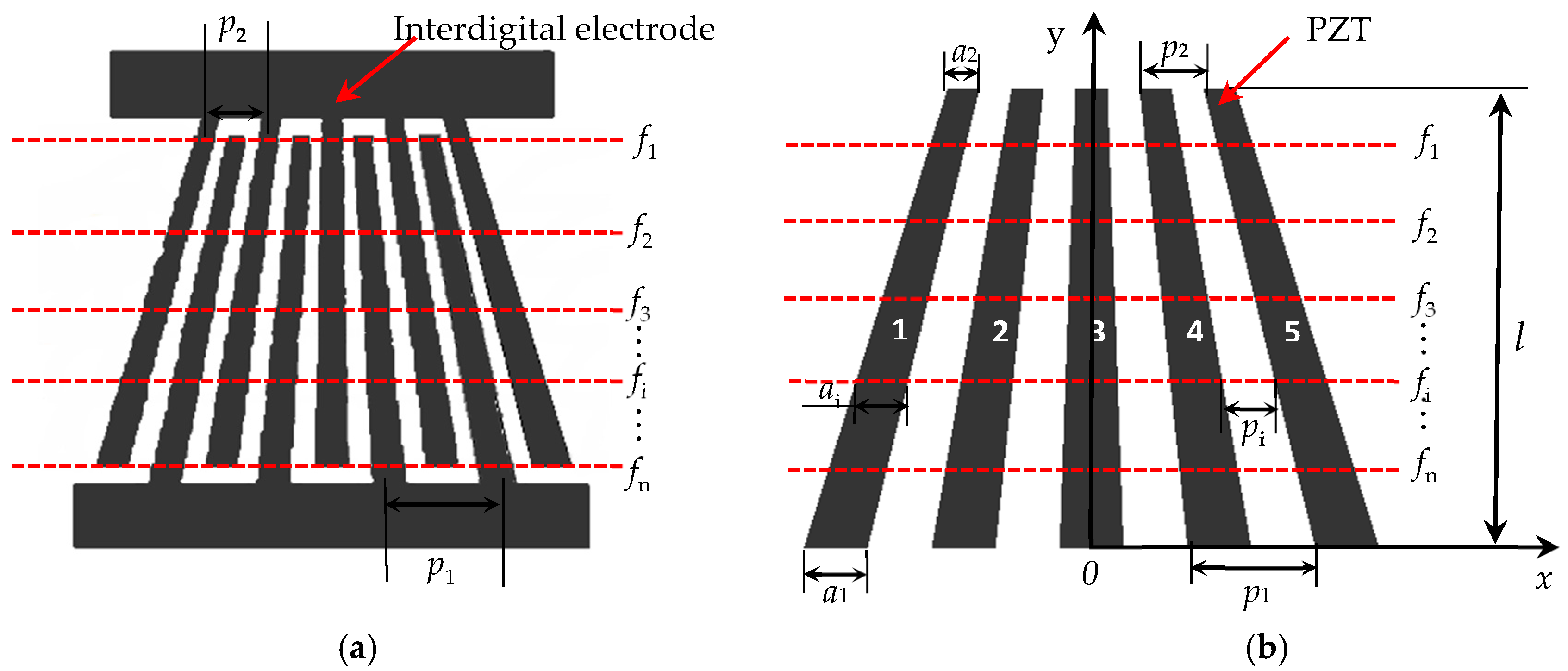
2.2.1. Dimension Parameter Optimization of Array Element
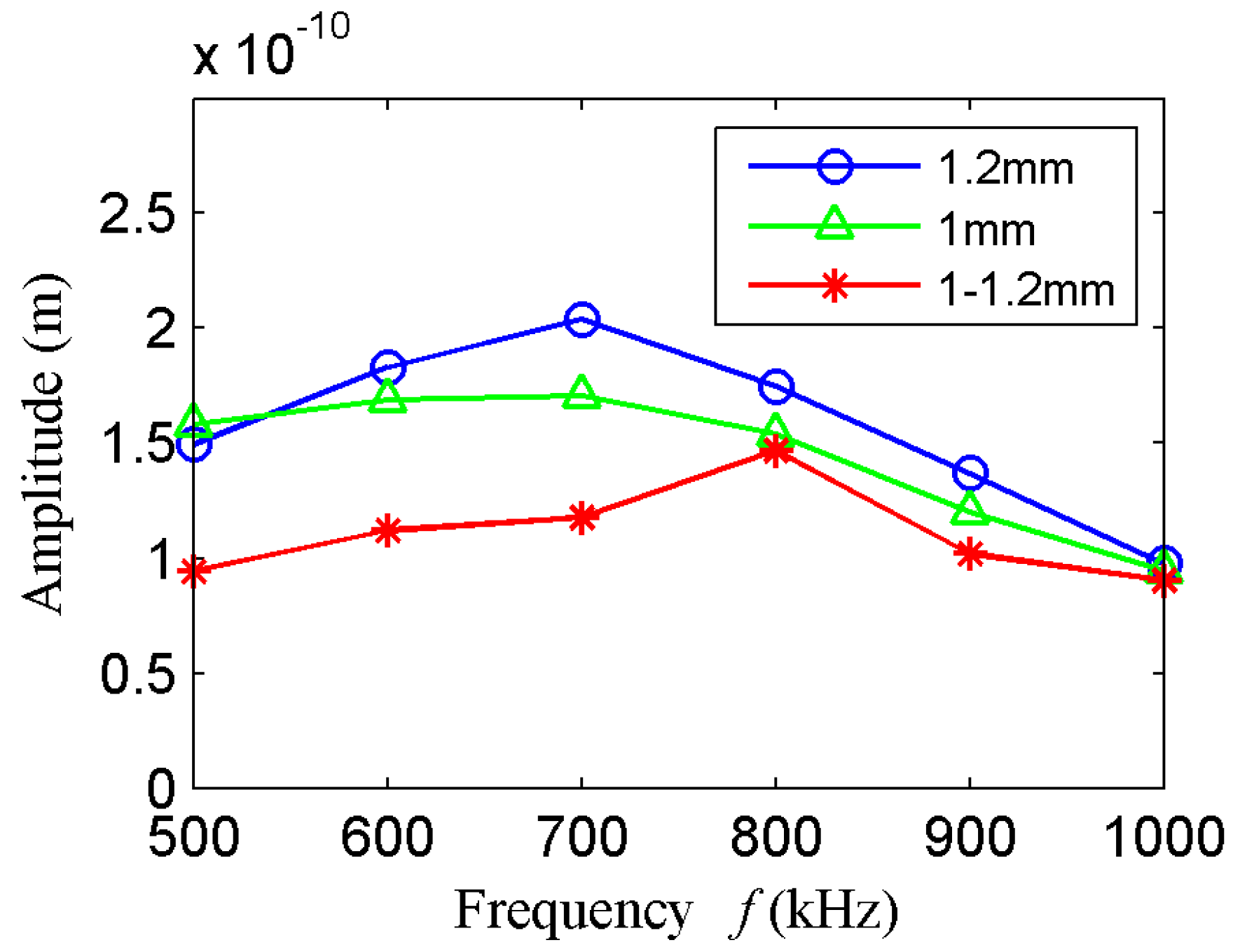
2.2.2. Study of Excitation Performance of the Transducer
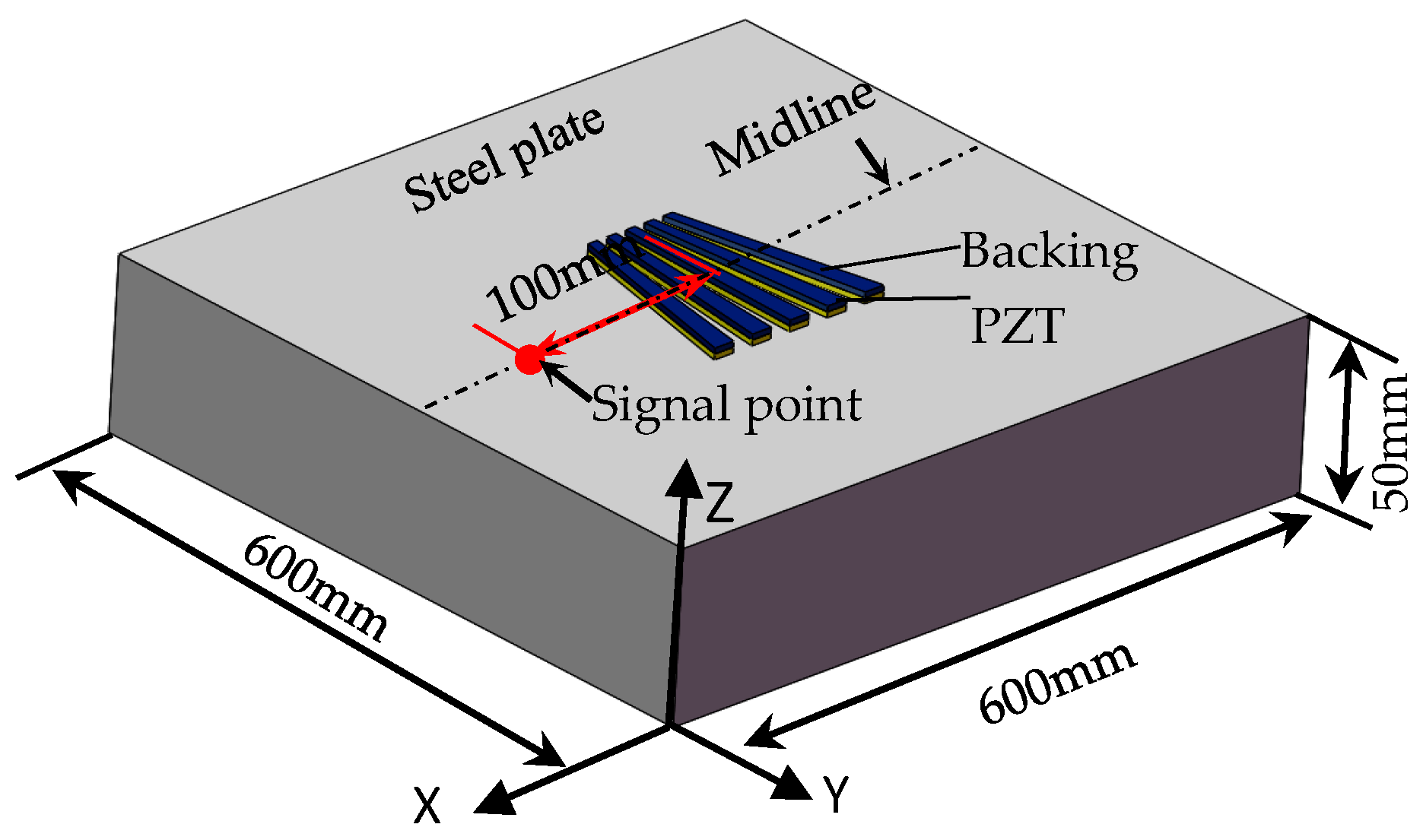
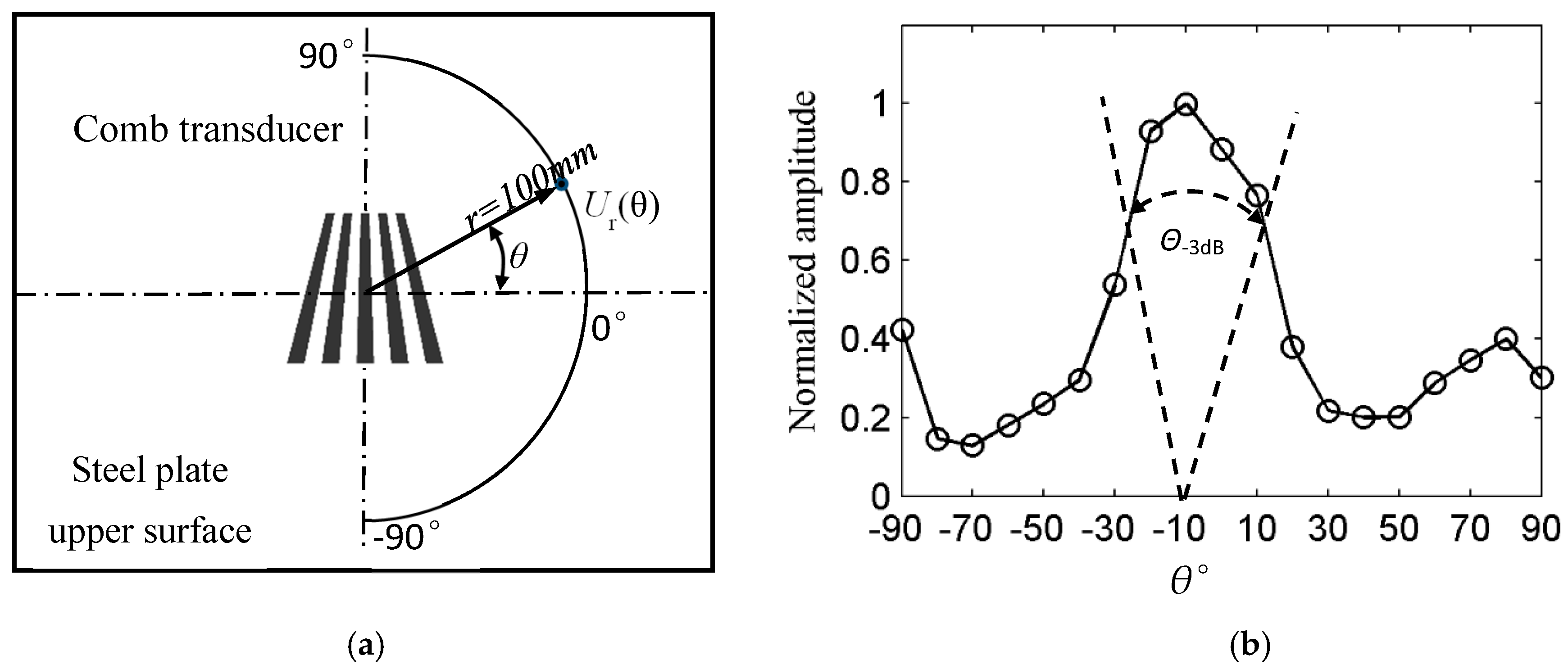
2.2.3. Study of Directivity of the Transducer
3. Transducer Fabrication and Performance Test
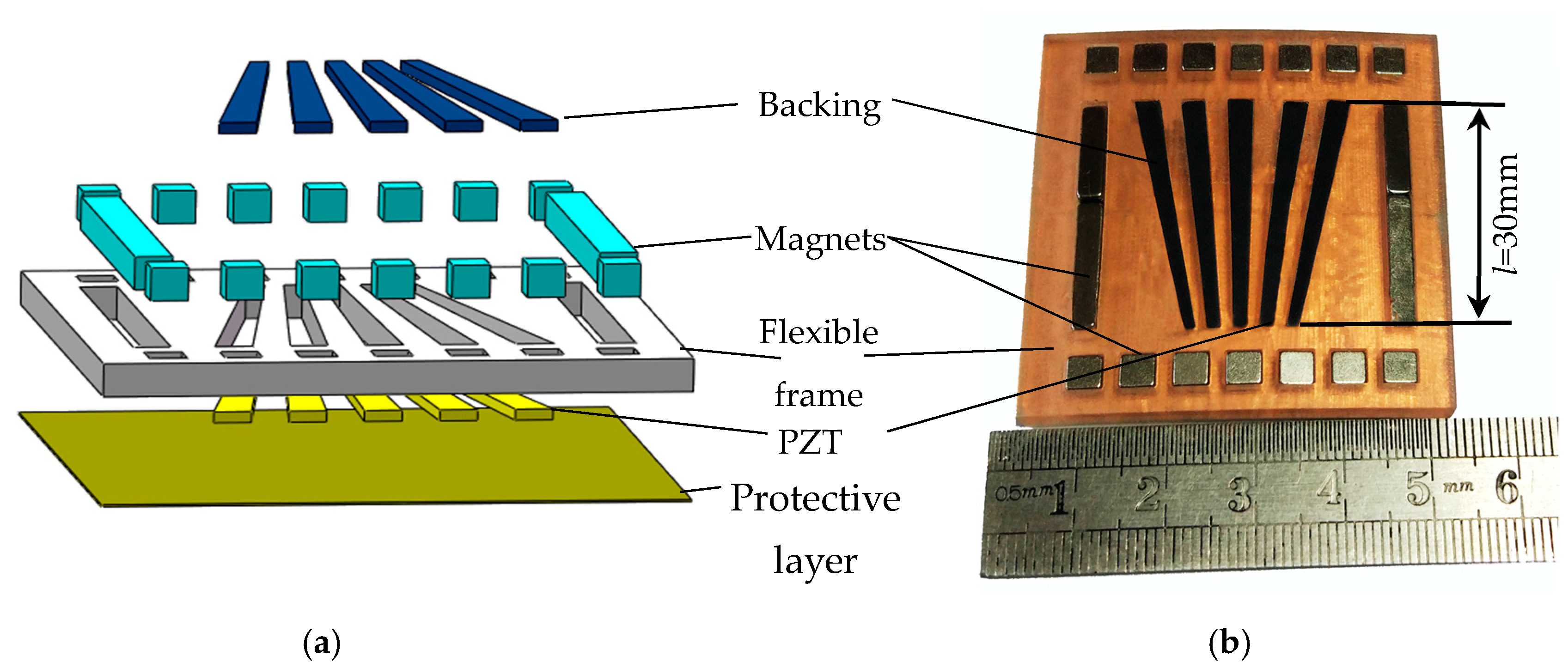
3.1. Transducer Fabrication
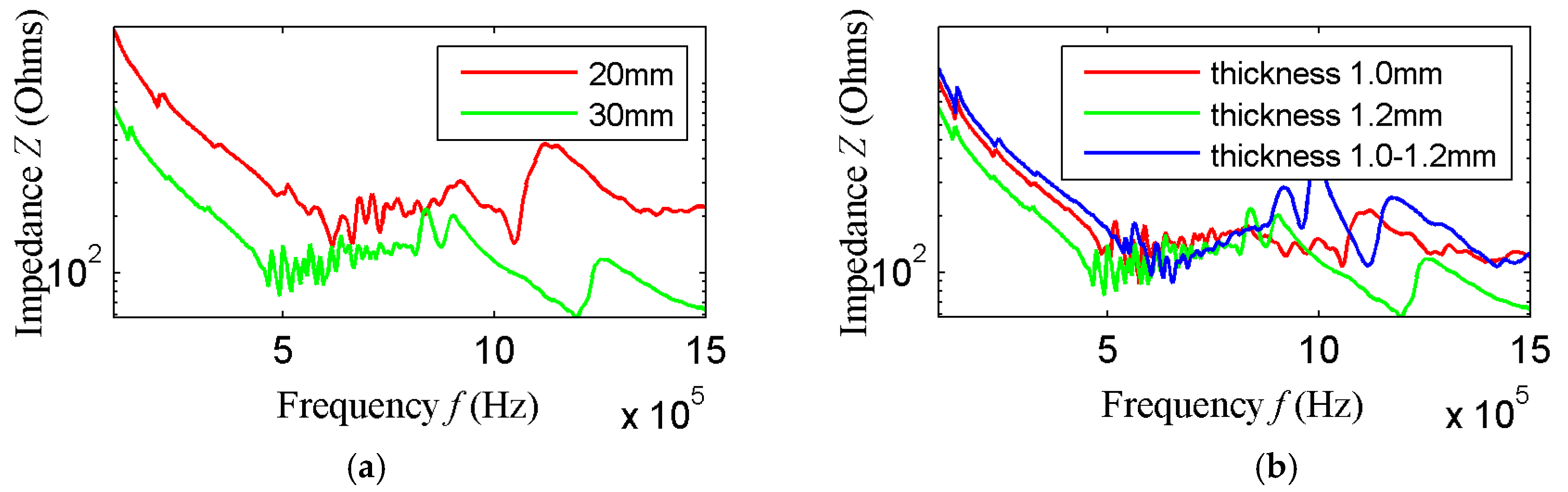
3.2. Transducer Array Element Test
3.3. Excitation Performance Test and Bandwidth Test of the Transducer
3.3.1. Excitation Performance Test of the Transducer
3.3.2. Transducer Directivity Test
3.4. Defect Detection Experiment of Thick-Walled Pipe
3.4.1. Detection of Cracks in Outer Wall of Thick-Walled Pipe
3.4.2. Detection of Cracks in Inner Wall of Thick-Walled Pipe
3.5. Discussion
- (1)
- Due to problems in the transducer manufacturing process, they have relatively low excitation signal magnitudes. Therefore, the excitation performance of transducers needs to be further improved.
- (2)
- The ability of such transducers in detecting defects in the outer walls of thick-walled pipe is better than in the inner wall; future transducer optimization should also focus on improving the detection of defects in the inner wall.
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hassan, W.; Veronesi, W. Finite element analysis of Rayleigh wave interaction with finite-size, surface-breaking cracks. Ultrasonics 2004, 41, 41–52. [Google Scholar] [CrossRef]
- Babich, V.M.; Borovikov, V.A.; Fradkin, L.J.; Kamotski, V.; Samokish, B.A. Scatter of the Rayleigh waves by tilted surface-breaking cracks. Ndt E Int. 2004, 37, 105–109. [Google Scholar] [CrossRef]
- Thring, C.B.; Fan, Y.; Edwards, R.S. Focused Rayleigh wave EMAT for characterisation of surface-breaking defects. Ndt E Int. 2016, 81, 20–27. [Google Scholar] [CrossRef]
- Hernandez-Valle, F.; Dutton, B.; Edwards, R.S. Laser ultrasonic characterisation of branched surface-breaking defects. Ndt E Int. 2014, 68, 113–119. [Google Scholar] [CrossRef]
- Yi, P.; Zhang, K.; Li, Y.; Zhang, X. Influence of the Lift-Off Effect on the Cut-Off Frequency of the EMAT-Generated Rayleigh Wave Signal. Sensors 2014, 14, 19687–19699. [Google Scholar] [CrossRef] [PubMed]
- Schaal, C.; Samajder, H.; Baid, H.; Mal, A. Rayleigh to Lamb wave conversion at a delamination-like crack. J. Sound Vib. 2015, 353, 150–163. [Google Scholar] [CrossRef]
- Danicki, E.J. Scattering by periodic cracks and theory of comb transducers. Wave Motion 2002, 35, 355–370. [Google Scholar] [CrossRef]
- Ballandras, S.; Wilm, M.; Edoa, P.F.; Soufyane, A.; Laude, V.; Steichen, W.; Lardat, R. Finite-element analysis of periodic piezoelectric transducers. J. Appl. Phys. 2003, 93, 702–711. [Google Scholar] [CrossRef]
- Moghadam, P.Y.; Quaegebeur, N.; Masson, P. Design and optimization of a multi-element piezoelectric transducer for mode-selective generation of guided waves. Smart Mater. Struct. 2016, 25, 075037. [Google Scholar] [CrossRef]
- Su, Z.; Ye, L. Selective generation of Lamb wave modes and their propagation characteristics in defective composite laminates. Proc. Inst. Mech. Eng. Part L 2004, 218, 95–110. [Google Scholar] [CrossRef]
- Santoni, G.B.; Yu, L.; Xu, B.; Giurgiutiu, V. Lamb Wave-Mode Tuning of Piezoelectric Wafer Active Sensors for Structural Health Monitoring. J. Vib. Acoust. 2007, 129, 752–762. [Google Scholar] [CrossRef]
- Scalea, F.L.D.; Matt, H.; Bartoli, I. The response of rectangular piezoelectric sensors to Rayleigh and Lamb ultrasonic waves. J. Acoust. Soc. Am. 2007, 121, 175–187. [Google Scholar] [CrossRef]
- Rose, J.L.; Pelts, S.P.; Quarry, M.J. A comb transducer model for guided wave NDE. Ultrasonics 1999, 36, 163–169. [Google Scholar] [CrossRef]
- Yan, F.; Borigo, C.; Liang, Y.; Koduru, J.P.; Rose, J.L. Phased annular array transducers for ultrasonic guided wave applications. Proc. Spie Int. Soc. Opt. Eng. 2011, 7984, 79840S. [Google Scholar]
- Quarry, M.J.; Rose, J.L. Phase velocity spectrum analysis for a time delay comb transducer for guided wave mode excitation. In Proceedings of the 28th Annual Review of Progress in Quantitative Nondestructive Evaluation, Brunswick, ME, USA, 29 July–3 August 2001; pp. 861–868. [Google Scholar]
- Glushkov, E.V.; Glushkova, N.V.; Kvasha, O.V.; Lammering, R. Selective Lamb mode excitation by piezoelectric coaxial ring actuators. Smart Mater. Struct. 2010, 19, 035018. [Google Scholar] [CrossRef]
- Kannajosyula, H.; Lissenden, C.J.; Rose, J.L. Analysis of annular phased array transducers for ultrasonic guided wave mode control. Smart Mater. Struct. 2013, 22, 085019. [Google Scholar] [CrossRef]
- Koduru, J.P.; Rose, J.L. Transducer arrays for omnidirectional guided wave mode control in plate like structures. Smart Mater. Struct. 2013, 22, 205. [Google Scholar] [CrossRef]
- Koduru, J.P.; Rose, J.L. Time delay controlled annular array transducers for omnidirectional guided wave mode control in plate like structures. Smart Mater. Struct. 2014, 23, 64–75. [Google Scholar] [CrossRef]
- Li, J.; Rose, J.L. Implementing guided wave mode control by use of a phased transducer array. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2001, 48, 761. [Google Scholar] [CrossRef] [PubMed]
- Bareille, O.; Kharrat, M.; Zhou, W.; Ichchou, M.N. Distributed Piezoelectric Guided T-Wave Generator, Design and Analysis. Mechatronics 2012, 22, 544–551. [Google Scholar] [CrossRef]
- Hay, T.R.; Rose, J.L. Flexible PVDF comb transducers for excitation of axisymmetric guided waves in pipe. Sens. Actuators A Phys. 2002, 100, 18–23. [Google Scholar] [CrossRef]
- Chang, J.J.; Wei, Q.; Ogura, Y.; Chao, L.U.; Chen, G. Development and Application of Broadband High Sensitive Flexible Phased Array Probe. Nondestr. Test. 2016, 38, 24–27. [Google Scholar]
- He, C.; Zhao, H.; Lv, Y.; Zheng, M. New type of flexible comb Rayleigh wave sensor based on the PZT. Chin. J. Sci. Instrum. 2017, 38, 1675–1682. [Google Scholar]
- Butler, J.L.; Butler, A.L. Ultra wideband multiple resonant transducer. In Proceedings of the OCEANS 2003, San Diego, CA, USA, 22–26 September 2003; Volume 5, pp. 2381–2387. [Google Scholar]
- Kachanov, V.K.; Sokolov, I.V.; Karavaev, M.A. Development of an Ultraacoustic Mosaic Wideband Piezoelectric Transducer for Contactless Testing of Articles Made of Polymer Composite Materials. Meas. Tech. 2015, 58, 203–207. [Google Scholar] [CrossRef]
- Zhang, Q. Wideband and Efficient Ultrasonic Transducers Using Multiple Piezoelectric Polymer Films. Diss. Abstr. Int. 1995, 56-04, 2167. [Google Scholar]
- Yatsuda, H. Design technique for nonlinear phase SAW filters using slanted finger interdigital transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1998, 45, 41–47. [Google Scholar] [CrossRef] [PubMed]
- Campbell, C.K.; Ye, Y.; Sferrazza Papa, J.J. Wide-Band Linear Phase SAW Filter Design Using Slanted Transducer Fingers. Sonics Ultrason. IEEE Trans. 1982, 29, 224–228. [Google Scholar] [CrossRef]
- Luan, G. Piezoelectric Transducers and Transducer Arrays; Peking University Press: Beijing, China, 1990; p. 327. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Density (kg/m3) | Longitudinal Wave Velocity (m/s) | Transverse Wave Velocity (m/s) |
|---|---|---|---|
| Low carbon steel | 7900 | 5900 | 3200 |
| PZT5H | 7500 | — | — |
| Backing | 5710 | 1750 | 935 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, H.; He, C.; Yan, L.; Zhang, H. Development of a Flexible Broadband Rayleigh Waves Comb Transducer with Nonequidistant Comb Interval for Defect Detection of Thick-Walled Pipelines. Sensors 2018, 18, 752. https://doi.org/10.3390/s18030752
Zhao H, He C, Yan L, Zhang H. Development of a Flexible Broadband Rayleigh Waves Comb Transducer with Nonequidistant Comb Interval for Defect Detection of Thick-Walled Pipelines. Sensors. 2018; 18(3):752. https://doi.org/10.3390/s18030752
Chicago/Turabian StyleZhao, Huamin, Cunfu He, Lyu Yan, and Haijun Zhang. 2018. "Development of a Flexible Broadband Rayleigh Waves Comb Transducer with Nonequidistant Comb Interval for Defect Detection of Thick-Walled Pipelines" Sensors 18, no. 3: 752. https://doi.org/10.3390/s18030752