A Modified Distributed Bees Algorithm for Multi-Sensor Task Allocation †


1
Department of Industrial Engineering and Management, Ben-Gurion University of the Negev, 8410501 Beer-Sheva, Israel
2
Institut de Robòtica i Informàtica Industrial, CSIC-UPC, 08028 Barcelona, Spain
3
PRISM Center and School of Industrial Engineering, Purdue University, West Lafayette, IN 47907, USA
*
Author to whom correspondence should be addressed.
†
This paper is an extended version of our paper published in Tkach, I.; Edan, Y.; Jevti´c, A.; Nof, S.Y. Automatic Multi-Sensor Task Allocation using Modified Distributed Bees Algorithm. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Manchester, UK, 13–16 October 2013; pp. 1401–1406.
Sensors 2018, 18(3), 759; https://doi.org/10.3390/s18030759
Submission received: 15 December 2017
/
Revised: 24 February 2018
/
Accepted: 27 February 2018
/
Published: 2 March 2018
(This article belongs to the Special Issue Smart Decision-Making)
Abstract
:Multi-sensor systems can play an important role in monitoring tasks and detecting targets. However, real-time allocation of heterogeneous sensors to dynamic targets/tasks that are unknown a priori in their locations and priorities is a challenge. This paper presents a Modified Distributed Bees Algorithm (MDBA) that is developed to allocate stationary heterogeneous sensors to upcoming unknown tasks using a decentralized, swarm intelligence approach to minimize the task detection times. Sensors are allocated to tasks based on sensors’ performance, tasks’ priorities, and the distances of the sensors from the locations where the tasks are being executed. The algorithm was compared to a Distributed Bees Algorithm (DBA), a Bees System, and two common multi-sensor algorithms, market-based and greedy-based algorithms, which were fitted for the specific task. Simulation analyses revealed that MDBA achieved statistically significant improved performance by 7% with respect to DBA as the second-best algorithm, and by 19% with respect to Greedy algorithm, which was the worst, thus indicating its fitness to provide solutions for heterogeneous multi-sensor systems.
1. Introduction
Distributed multi-sensor systems can play an important role in monitoring and detection applications, due to their capability to cover the entire area and ensure a robust response to dynamic situations [1,2,3]. Fusion of various sensor inputs (e.g., visible, infrared, microwave, and acoustic) can further increase performance and reliability [4] since each sensor has different capabilities (e.g., detection distance, angle, resolution). Most multi-sensor monitoring systems rely on a very large number of sensors, usually swarms, to cover the entire area and to be able to allocate tasks [5,6], which makes the problem of the efficient allocation of sensors to tasks NP-hard [6]. When there are several tasks that require the same sensors, a decision must be made regarding which sensor to allocate to which task. In complex manufacturing systems, this problem becomes more complicated as tasks arrive at different locations and unknown times, and sensors are heterogeneous. The allocation depends on the sensors’ availability and performance, and the priorities of individual tasks.
This research focuses on allocation of stationary heterogeneous sensors to dynamic tasks. The sensors’ locations are a priori set and are tested for different distribution strategies. The tasks appear randomly with a uniform distribution. The task allocation is performed by adapting a more recent Modified Distributed Bees Algorithm (MDBA) [7]. The current paper details the problem formulation and provides an in-depth and complete analysis of the results. Evaluations include comparison to another biologically inspired Bees System (BS) algorithm [8], systems’ scalability for the number of sensors and tasks, and the impact of the control parameters on task allocation. The new results include systems’ performance based on sensors’ distribution and the number of sensors that are used, and the number of treated tasks by each sensor in each algorithm.
In this paper there is no limitation in the number of sensors that can be allocated to a single task. This eliminates the conflict of demanding the same task by multiple sensors.
MDBA’s performance was compared to four state-of-the-art algorithms that were adjusted for the specific application. The choice of algorithms was made to include different approaches; specifically, we compared greedy vs. heuristic and swarm-based vs. market-based approaches. Accordingly, the algorithms compared were DBA, market-based algorithm [9], greedy algorithm [10], and Bees System. Due to the complexity of the problem a comparison was made with decentralized versions of market-based and greedy algorithms. The centralized version of these algorithms was implemented before in [7] but yielded poor results.
The remainder of this paper is organized as follows. Section 2 describes the related work. Section 3 defines the Multi-Sensor Task Allocation problem. Section 4 describes the algorithms formulation followed by Section 5, which presents the simulation setup. Section 6 presents the simulation results, with conclusions being presented in Section 7.
2. Related Work
In multi-sensor multi-task applications, the problem of task allocation refers to selection of suitable sensor combinations to be allocated to perform different tasks [11]. Many known allocation strategies require tasks to be defined a priori so that they can be allocated efficiently to specific sensors [4] and robots [12,13,14]. However, in real-world scenarios, the upcoming tasks are usually undefined and have a dynamic nature (e.g., unknown arrival times, change in location, different priorities [15]). Therefore, it is necessary to decide when and where to apply sensors to ensure maximum task attendance, and to decide how to reallocate sensors to adapt to the dynamic tasks locations, arrival times, and priorities, while minimizing the number of the required sensors [11]. For the allocation problem, each individual sensor is considered as an agent with particular capabilities [16]. Sensor allocation has been previously achieved using different methods, such as a network flow optimization model and cause effect graph [4,17], data association algorithm in sensor network [18], market-based approaches applied in multi agent systems [19,20,21,22,23], and dynamic allocation and coalition-based approach [24,25,26,27,28,29,30,31].
Swarm intelligence, inspired by the emergent behavior of social insects, such as ants, bees, and termites, flocks of birds, and schools of fish, has been used to model the behavior of intelligent multi-agent systems [32,33,34,35,36,37]. In swarm intelligence algorithms, cooperating agents interact by exchanging locally available information, such that the global objective is obtained more efficiently than it would be done by agents that perform tasks individually [38]. Swarms can be useful because they can deliver performance that is better than the sum of the parts. These algorithms have been applied to applications of multi-agent exploration and path formation [39], energy optimization in sensor networks [40], multi-site deployment [41], parallel computing optimization [42], cooperative transport and vehicle routing [43,44], feature selection [45], intruder detection [46], resource allocation [47], multi-robot task allocation and tracking applications [48,49], and so forth. Disadvantages of swarm intelligence may include needless activities of the agents, conflicts, and slow global response to a change in the environment [38,50].
The Distributed Bees Algorithm (DBA) is a swarm intelligence algorithm that is suitable for implementation in a multi-agent system and is also scalable with low computational overhead [48]. This algorithm uses a bottom-up design topology that makes the multi-agent systems autonomous, scalable, robust, and adaptive to changes in their environment. Initially, DBA was proposed to solve the problem of homogeneous agents. By neglecting the agent ability-based performance parameter, it can be applied also to heterogeneous multi-agent systems (without addressing the different ability of each agent). But, the fact that it models the system as a swarm of agents with equal abilities limits the overall system performance. The first implementation of DBA to heterogeneous agents was developed in [7].
Both, DBA and MDBA use swarm intelligence principles to provide distributed multi-sensor system control. The MDBA algorithm introduces sensor’s performance as an additional control parameter for sensor allocation. In previous work, DBA was applied to a homogeneous mobile sensor network and stationary tasks, without the reallocation of sensors during task execution [48]. In this paper, the DBA’s parameters were set to allocate dynamic tasks to a heterogeneous multi-sensor system. Once a sensor finds a task, it informs the neighboring sensors about the found task and its parameters, using broadcast communication (as in [10,51,52,53]). This message is then forwarded by these sensors over the entire network, as in [53]. From that moment, the sensors are aware of the detected task. Even though the sensors use broadcast communication to share the estimated location and priority of the tasks, task allocation is performed in a decentralized manner, where each sensor makes an autonomous decision that is based on the information that it has received.
Market-based algorithms apply an auctioning mechanism and the principles of market economy to allocate tasks in a multi-agent system [54]. In this virtual economy, the sensors are traders, tasks are traded commodities, and virtual money acts as currency. Sensors compete to win tasks by participating in auctions in which each sensor acts to maximize its individual profit and simultaneously improve the efficiency of the team. The limitations of market-based algorithms include a limited ability to deal with unknown and dynamic situations, and high demand of communication and computation resources [55].
The greedy algorithm is a heuristic algorithm widely applied to optimization problems [56]. It makes a locally optimal choice at each stage aiming to find a global optimum, but fails if the locally optimal solutions are not part of the global optimum [57]. Therefore, for large scale search problems, it has a tendency of getting stuck in a local optimum.
A comprehensive comparison of related work on agent management and coordination has been published in [58]. The novelty of the proposed approach is that it enables the efficient allocation of a heterogeneous swarm of sensors to dynamic tasks by a decentralized coordination that does not rely on a central agent (which can be a single point of failure) to coordinate sensors. The proposed approach is also scalable in terms of different number of tasks and sensors.
3. Problem Definition
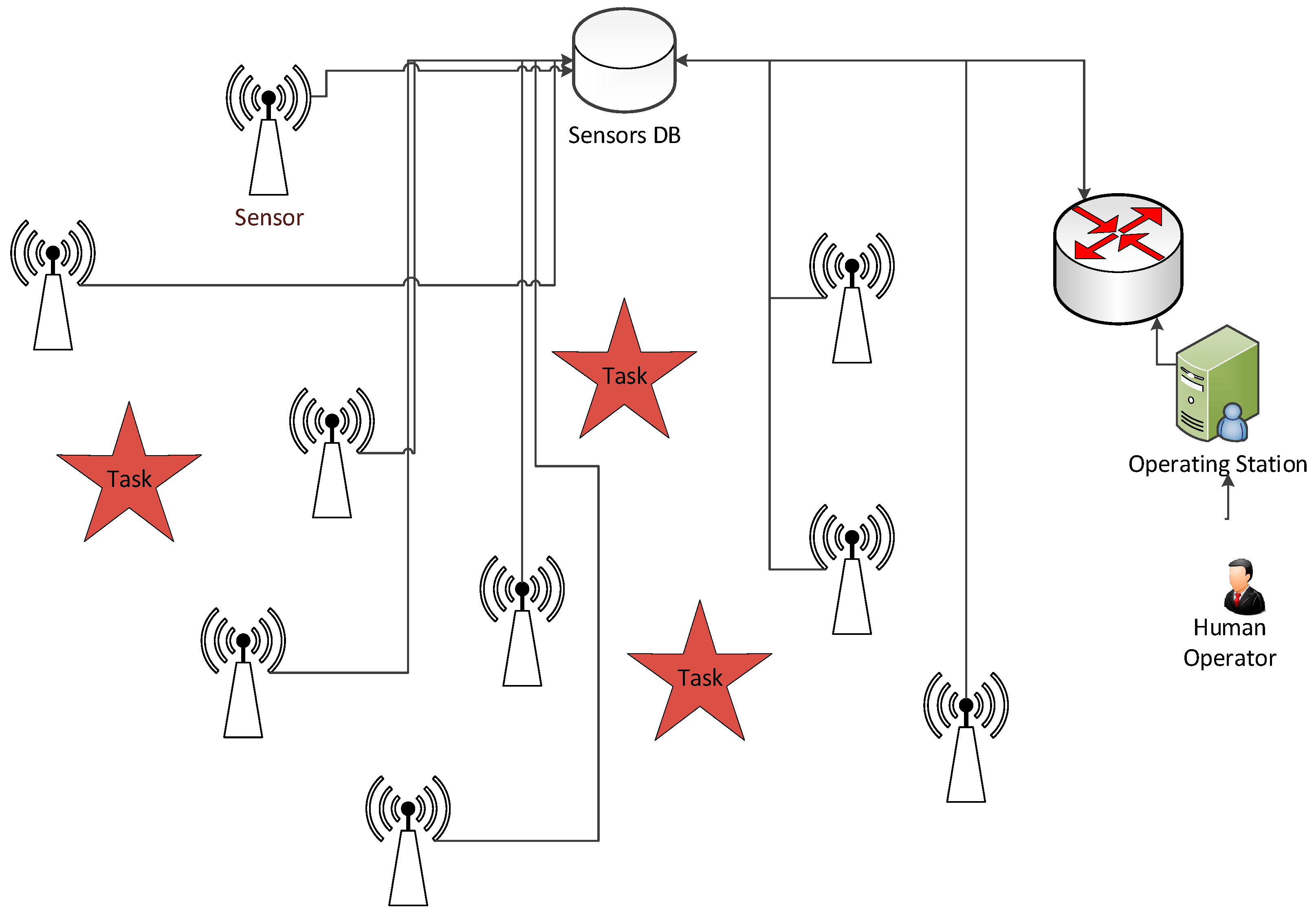
The problem deals with real-time allocation of stationary heterogeneous sensors to unknown tasks arriving at unknown times and locations. The tasks’ occurrence is dynamic and unpredictable with different levels of importance of each task (defined as priority). Examples of such tasks include surveillance (gathering information on desired objects [59]), security monitoring (preventing theft of goods and threats [60]), fire monitoring (forest fire detection and protection [61]), among many others. The sensors must be allocated to the tasks as fast as possible. The system consists of multiple sensors that are capable of performing each task with different performances (Figure 1). Sensory performance is defined a priori based on the sensor’s features, namely detection distance, resolution, and response time. Each sensor can only be allocated to one task at any given time and can be reallocated to another task at any moment. The priority of a task is an application-specific scalar value, where a higher priority value represents a task that has higher importance and must be attended to faster than other tasks. Higher priority tasks also have a higher benefit for completing them. The goal is to allocate each sensor an appropriate task at an appropriate time and to ensure that all tasks are completed in minimal time.
When there are several tasks that require the same sensors, the allocation depends on the sensors’ availability and performance, the physical distance of sensors from the tasks and the priorities of individual tasks. The following assumptions were considered in the proposed scenario, similar to research performed in [48]:
- the tasks occurrence is unknown a priori;
- all of the tasks within a sensor’s range can be allocated to that sensor;
- decision-making for each sensor takes place as soon as a new task is introduced;
- sensors can be reallocated to another task during execution. An abandoned task keeps its remaining execution time, until a new sensor is allocated to it. Following [59] the system is defined with the following characteristics:
- sensors are stationary; and,
- tasks remain stationary after their occurrence.
Based on taxonomy proposed by [62], the problem of allocating sensors to tasks corresponds to a localization and observation problem. The task localization involves several sensors and it is most often a multi-sensor problem to improve knowledge about the task involving selection of different viewpoints to maximize the information gain. The observation problem involves several sensors and several tasks in order to maximize the number of observed tasks and to minimize the time during which any task is not observed by at least one of the sensors.
A system objective function was developed to allow computation of the expected value of system performance given parameters of the sensors and tasks. System performance is defined as the collective performance of sensors, task priorities values and distances of sensors from tasks. Consider a population of N sensors to be allocated among M tasks. We denote the collective performance of the system by VI, a nonnegative integer, calculated as:
where S is the collective performance of the sensors, Vik is the k-th sensor’s performance on the i-th task, and N is the number of sensors in the system. H is the sum of the priorities of tasks in the system that were successfully completed and φ is a bias parameter for the importance of H relative to S. Fj is the priority of j-th task and M is the total number of tasks. These values were pre-defined in the simulation setup based on [56].
Sensors are distributed in the arena with a particular distribution strategy (as in Figure 2) and can be allocated to tasks within their detection range. The sensors are stationary. One of the parameters that affect system performance is the distance of the sensors from tasks. The performance degrades as the distance increases, due to the degradation of sensors recognition capabilities.
The Euclidean distance between the sensor and the task in a two-dimensional arena is given by:
where (xi, yi) and (xk, yk) represent task’s and sensor’s coordinates in the arena, respectively.
Let Fϵ{F1, …, FM} denote the set of normalized priorities of the available tasks in the queue. Normalized priorities are calculated as fractions of the sum of priorities of all available tasks:
where fi is a priority of the task i.
Each task has a time limit, or a deadline:
where Δi decreases with time till it reaches a value of 0 which indicates that the task i is not relevant any more.
Once a sensor is allocated to a task, it monitors this particular task (with a performance Vik). A task is considered to be completed once sensors are allocated to it.
Each task is assumed to have an initial completion time value tinit. The task execution time value is modeled as a function of the initial completion time that is required for the task and the performances of sensors that are allocated to it. This dynamic value is continuously updated (Equation (8)).
where texi is the remaining execution time of task i and tpi is the elapsed time of task i execution. When texi reaches 0 value, the task is completed, and it is removed from the arena by the broadcast communication.
When new tasks are announced, steps (1)–(8) are updated respectively. The overall task completion time T is defined as a sum of the individual tasks completion times tci:
The task completion time is derived by the amount of time elapsed from its arrival tiarrival to the full completion tif_completion.
4. Algorithms
The developed MDBA [7] is compared to the original DBA [48], BS [8], a greedy algorithm [10], and to a market-based algorithm [9], which were implemented to fit the sensor allocation problem, as described below.
4.1. Distributed Bees Algorithm
In this algorithm, each sensor is represented as a ‘bee’, and sensor utility, pik, is defined as a probability that the sensor k is allocated to the task i and depends on both priority and the distance of the task from the sensor:
where α and β are control parameters that bias importance of the priority and distance, respectively, (α, β > 0; α, β ϵ R). The probabilities pik are normalized, and it is easy to show that:
The DBA decision-making mechanism uses a wheel-selection rule used in [48], where each sensor is allocated a task from a set of available tasks based on its probability.
4.2. Modified Distributed Bees Algorithm
In the MDBA, the original DBA sensor utility function is modified to take advantage of heterogeneous sensors with different performances aiming to improve system performance by correlating the sensors’ utility with their performances.
To apply MDBA to heterogeneous sensors, a control parameter was defined in [7] as a function of the sensor’s performance on a task. When a sensor receives information about an available task it calculates its performance for that task. The sensor’s utility function is updated accordingly, and depends on the task priority, the distance from the task and the sensor’s performance on that task:
where γ is a control parameter that biases the importance of the sensors performance and Vik is the performance of sensor k on task i.
The MDBA decision-making mechanism applies the same wheel-selection rule that is used in DBA to choose from a set of available tasks.
4.3. Market-Based Algorithm
A market-based algorithm used in [9] for distributed sensing tasks was applied with application-specific modifications. In this approach, the bid of sensor k to task i is defined as (14):
where Fik serves as the reservation price of task i, and δ is a control parameter with values between 0 and 1. A task i is selected by sensor k if it maximizes its bid value:
4.4. Greedy Algorithm
A greedy algorithm that was used previously for a multi target observation problem with broadcast messaging [10] was modified to fit the described problem. The greedy algorithm was set to perform sensor allocation based on the best possible allocation of each individual sensor to task that maximizes Vik/Dik, where Vik is the k-th sensor’s performance on the i-th task and Dik is the Euclidean distance between the sensor and the task:
where taski is the task chosen by the k-th sensor, and Z is the set of tasks within k-th sensor range. Note that Z is a subset of all M available tasks.
4.5. Bees System
A BS used in [8] for a traveling salesman problem was applied with application-specific modifications. This algorithm uses an artificial colony of bees to optimally allocate sensors to tasks. When a new task is introduced, the algorithm is able to replace the obtained allocation with a new improved allocation:
where ρ and θ are control parameters that bias the importance of the priority and distance, respectively (ρ, θ > 0; ρ, θ ϵ R).
5. Simulation Setup and Analysis
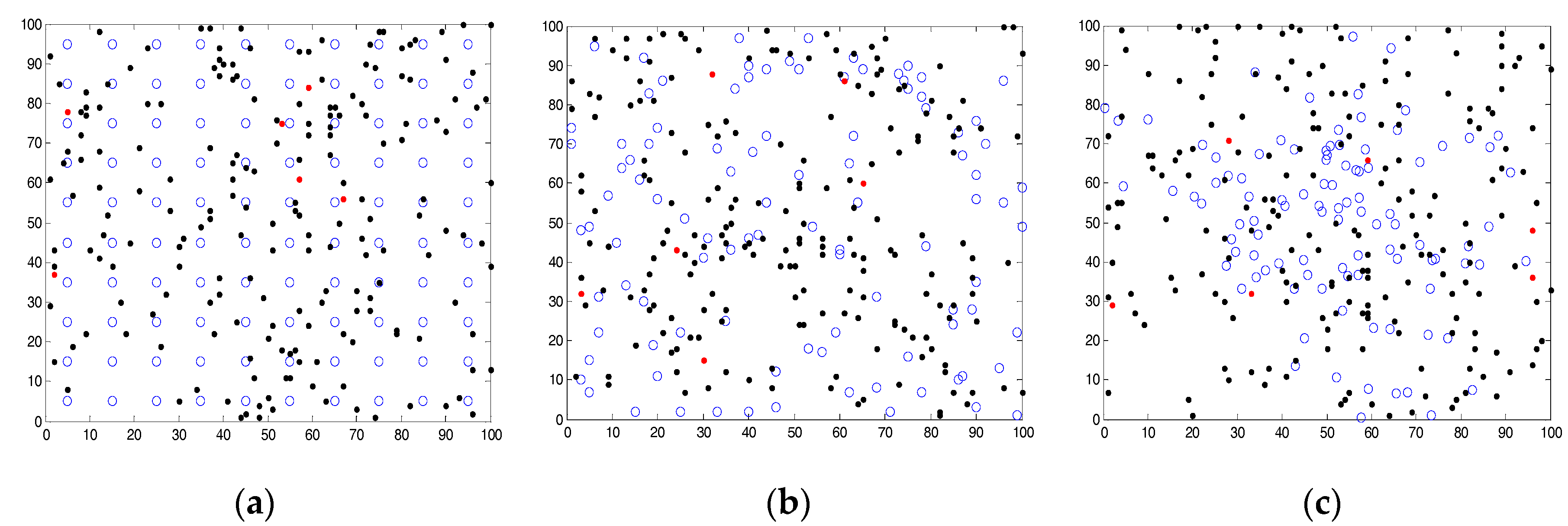
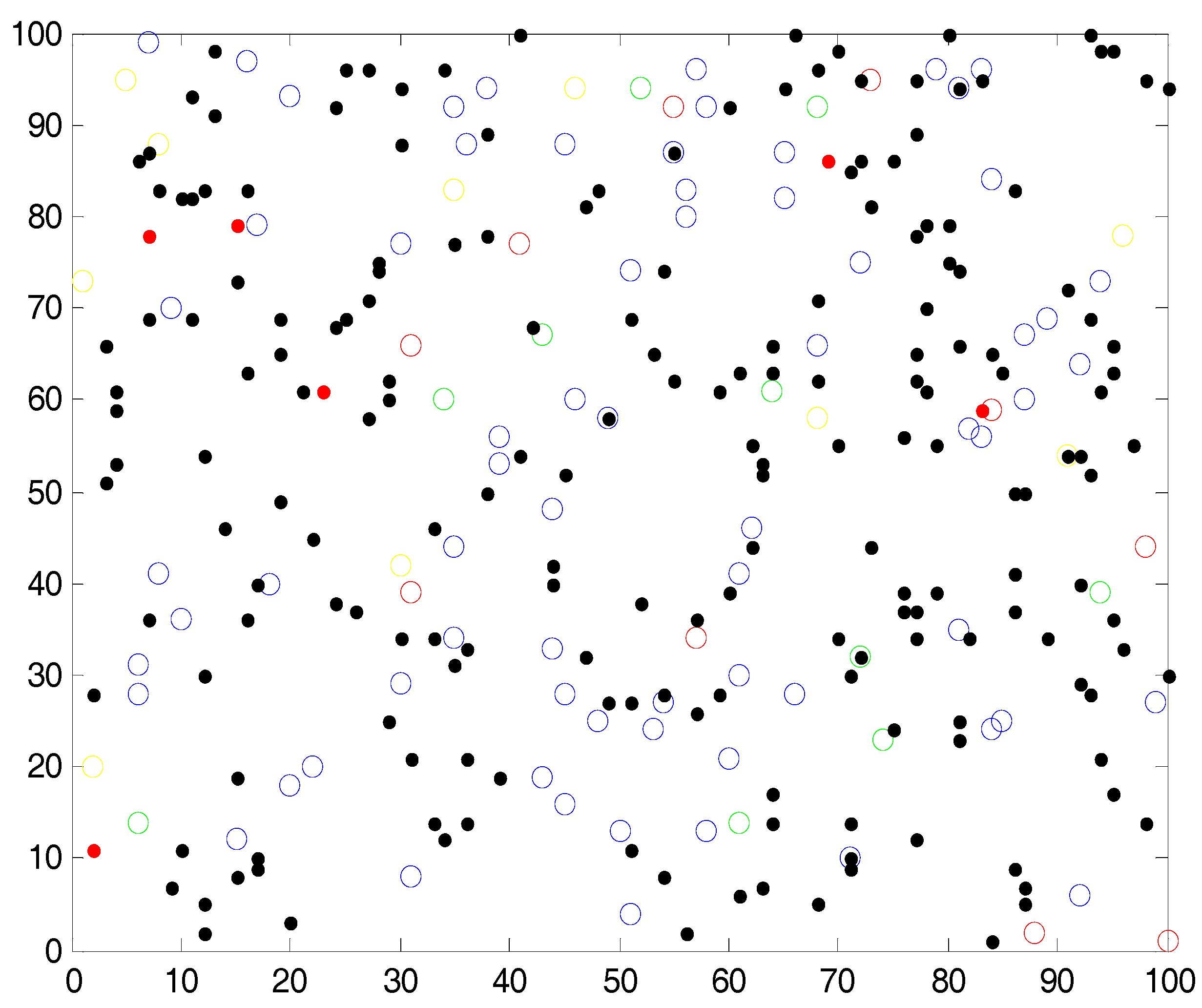
In this research, three types of sensors are considered with different detection ranges and performances. Experiments were performed for a square-shaped simulation arena, but it can be easily extended to relatively complicated geometries. In addition, three deployment strategies have been considered as shown in Figure 2; (a) deterministic deployment (e.g., grid deployment); (b) random deployment, i.e., uniformly distributed random deployment; and, (c) random and biased deployment, i.e., normally distributed random deployment. Deployed sensors are marked as blue circles and tasks are marked by dots (black dots represent tasks that were completed, and red dots represent non-completed tasks). In these figures, there are 200 tasks (final distribution of tasks on the map) and 100 sensors distributed over the map. Effects of various sensor densities were examined.
The parameters that were used for the simulation are presented in Table 1. Tasks were uniformly distributed in the arena based on [2,63]. The sensors’ range values were predefined to cover 15 to 45 m relative to the size of the arena (100 × 100 m). An inherent noise in each sensor was introduced according to typical operational distance ranges of known commercial sensors [64] relative to the arena size: acoustic sensor, seismic sensor, and forward looking infrared radar (FLIR). The detection range of these sensors is given by:
The numerical computations were performed on a PC with 2.00 GHz CPU, and 8GB of RAM, using Matlab R2012a software. The following performance measures were analyzed to compare the different allocation algorithms:
- System performance as defined in (1).
- Tasks completion time as defined in (9).
- Number of unallocated tasks is defined by:where λ is the number of unallocated tasks, M is the total number of tasks in the system, N is the total number of sensors in the system, i is the index of current task and Vik is the k-th sensor’s performance on the i-th task.
- Number of tasks allocated to a sensor k is defined by:where χk is the number of treated tasks by the k-th sensor, M is the total number of tasks in the system, i is the index of current task and Vik is the k-th sensor’s performance on the i-th task.
The mean values that were obtained from 100 independent runs of MDBA, DBA, BS, market-based, and greedy algorithms, were compared at the statistical confidence level of 95%. The MDBA performance was simulated for three sensor distributions based on [65]: grid, uniform, and normal distributions.
In order to evaluate the system’s scalability, simulation analysis was conducted for different numbers of sensors and tasks. In the initial setup, 80 sensors were uniformly distributed in the area. Twenty additional sensors were introduced into the system in two phases. In the last phase, 10 sensors were removed.
The control parameters, α, β, and γ provide a mechanism to adjust the sensor swarm behavior. The values of α, β, and γ were changed in order to bias the resulting sensors’ allocation and to test the system’s performance for different values of these parameters: α = β = γ = 1, α = 2β = 2γ, α = 2β = γ, α = 2β = 0.5γ.
6. Results
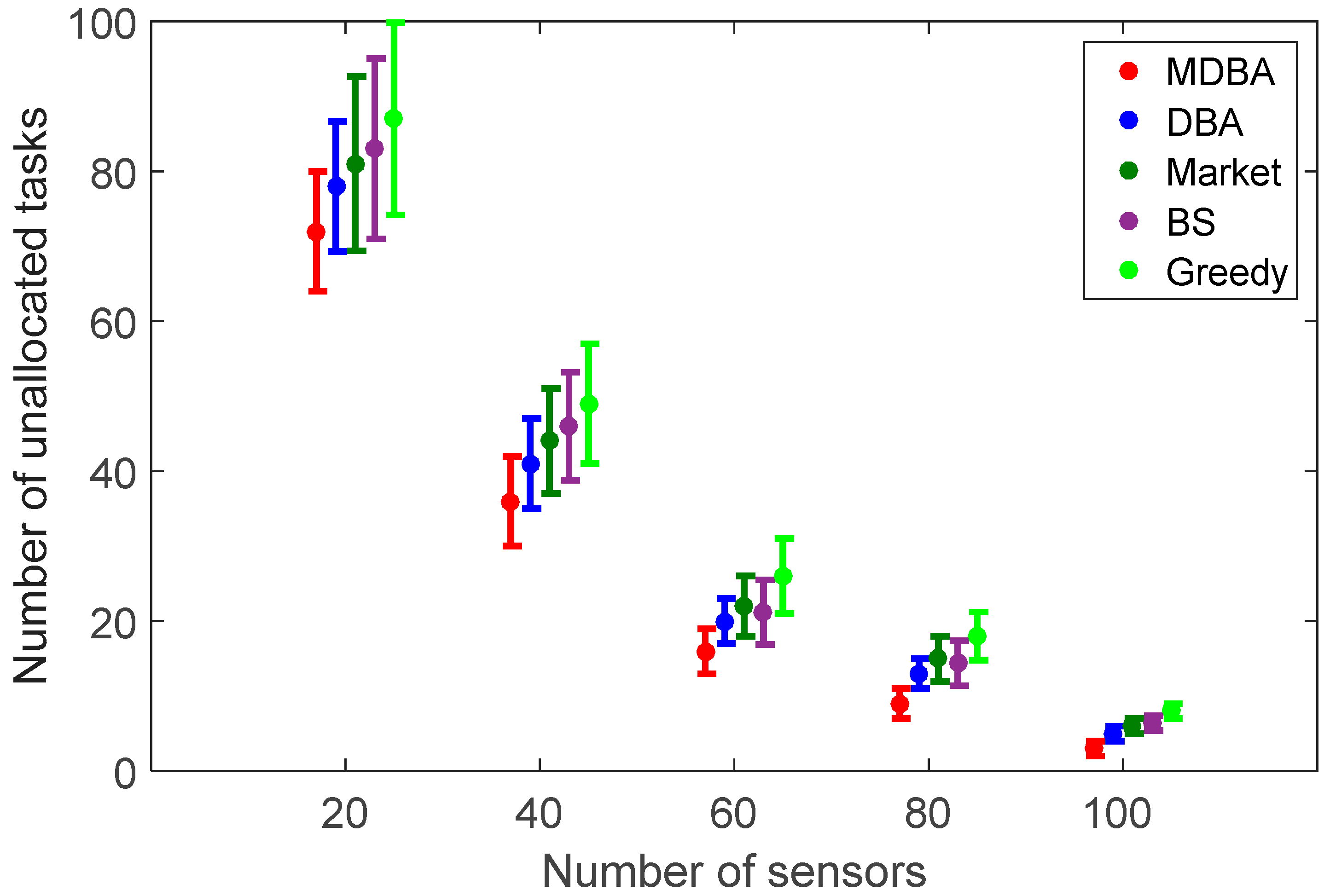
Results revealed, as expected, that as the number of sensors increased, the mean number of unallocated tasks decreased, respectively, for all of the algorithms (from 72.53 to 4.74, from 78.25 to 5.88, from 81.14 to 6.07, from 83.13 to 5.98 and from 87.65 to 8.61 in MDBA, DBA, market-based, BS and greedy algorithms, respectively; Figure 3). By adding more sensors, the impact of their relative contribution decreases due to the overlapping range coverage (e.g., the difference in the mean number of unallocated tasks between 20 sensors to 40 sensors and between 80 to 100 sensors is 36 and 6 respectively). Therefore, optimal sensor density can be changed upon desired geometry of the arena and must be obtained through simulations. The bio-inspired algorithms MDBA and DBA resulted in a lower number of unallocated tasks than the market-based and greedy algorithms by 45.9% on average (from 29.31, std = 4.07 to 42.76, std = 5.66, p < 0.05) and with maximum of 81.7% difference (from 4.74, std = 0.97 to 8.61, std = 1.09, p < 0.05). The high number of unallocated tasks (72) when using 20 sensors was due to the limited coverage range of the sensors.
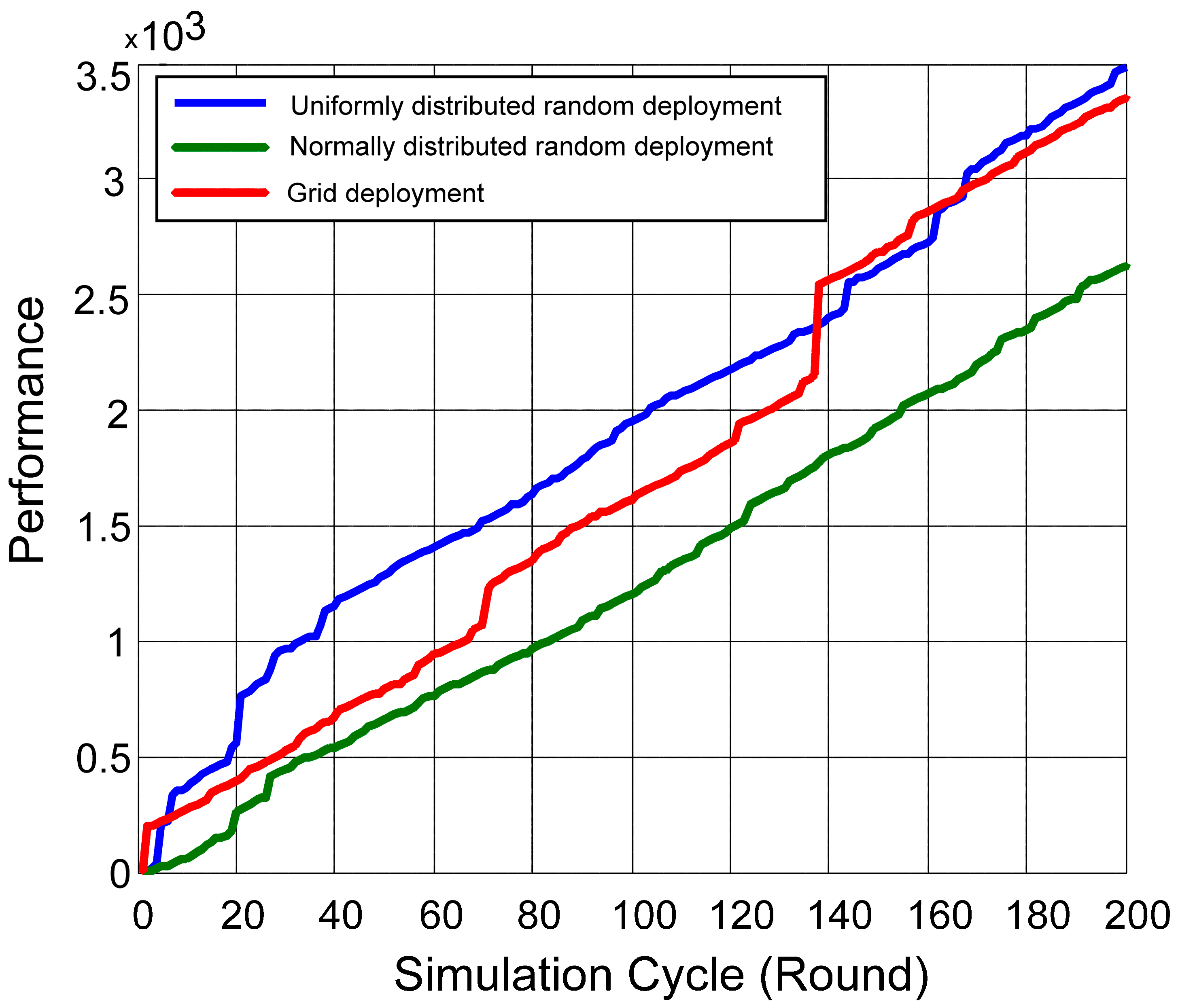
The best performance of MDBA was obtained for sensors with a uniform distribution (Figure 4), resulting in the shortest task completion time with 5.1% and 26.3% improvement from the grid and normal distributions, respectively (p < 0.05). The normally distributed random sensor deployment achieved lower performance due to the fact that most of the sensors were deployed in the center of the arena. Thus, tasks that were generated in the edges of the arena were treated with lower performance. The performance changed as time advanced since sensors were allocated to the high priority tasks that were generated in a particular simulation cycle.
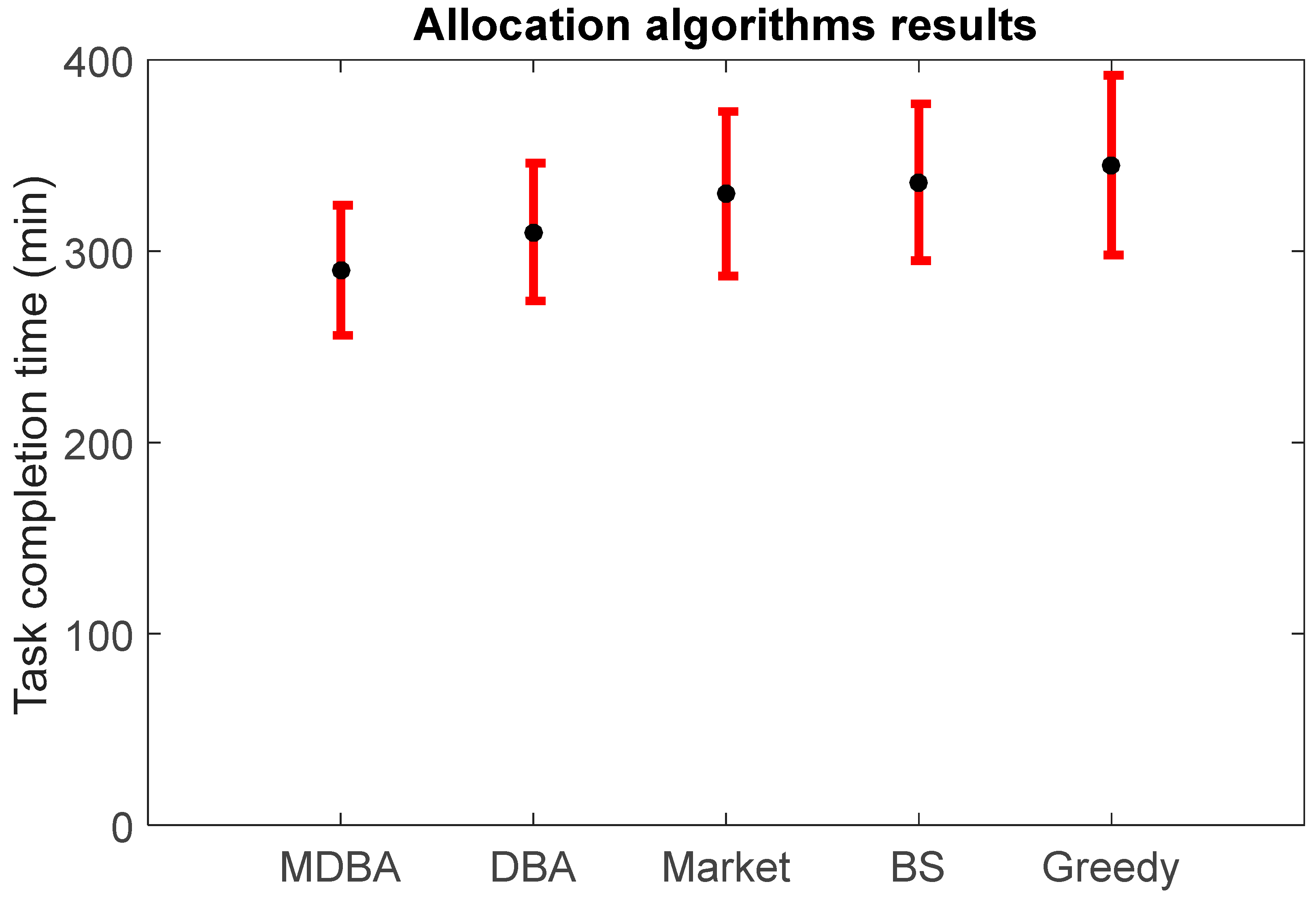
The task completion times of 100 sensors using MDBA, DBA, market-based, BS and greedy algorithms are shown in Figure 5. The MDBA algorithm resulted in the lowest tasks’ completion time (291.21 min, std = 34.23, which is 6.6% lower than the second best algorithm, 310.12 min, std = 34.79, and 18.3% when compared to the greedy algorithm, 344.41 min, std = 35.21, all with p < 0.05).
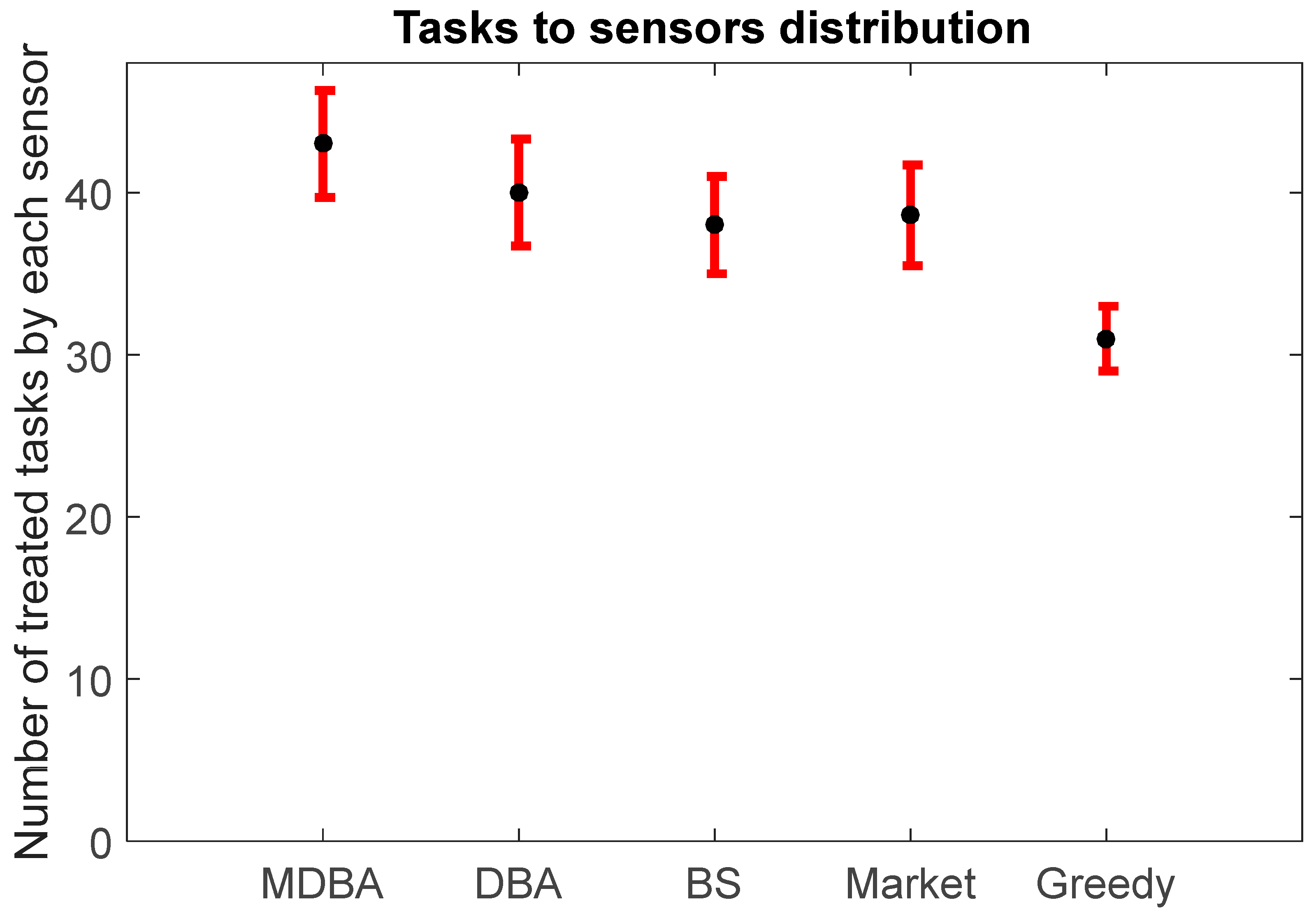
The greedy algorithm resulted in the longest completion time (346.36 min), due to its’ intrinsic greedy logic, which resulted in constant occupation of the best performing sensors without attempts of creating allocation combinations that optimize the overall performance. Also, it must be noted that despite the shorter completion time (291.21 min), MDBA resulted in a higher average number of tasks (43, std = 3.37) that were treated by each sensor when compared to the market-based algorithm (38, std = 3.25, with 329.34 min run time) and greedy algorithm (31, std = 3.12, with 346.36 min run time). In this sense, MDBA has a slight disadvantage in excessive sensor occupation (Figure 6), which can result in a higher failure rate and eventually reduce the overall system availability; however, these risks could be reduced by a more redundant sensor design. For example, if the system is designed with several redundant sensors in addition to the operational sensors, then the system’s availability will increase.
The system was able to scale-up with different numbers of sensors and tasks, and to maintain the ability to allocate sensors to the upcoming tasks (Figure 7). In all three phases that were simulated by addition and subtraction of sensors during the simulation, the system continued to allocate sensors and achieved an average value of tasks completion time of 312.55 min, std = 35.33.
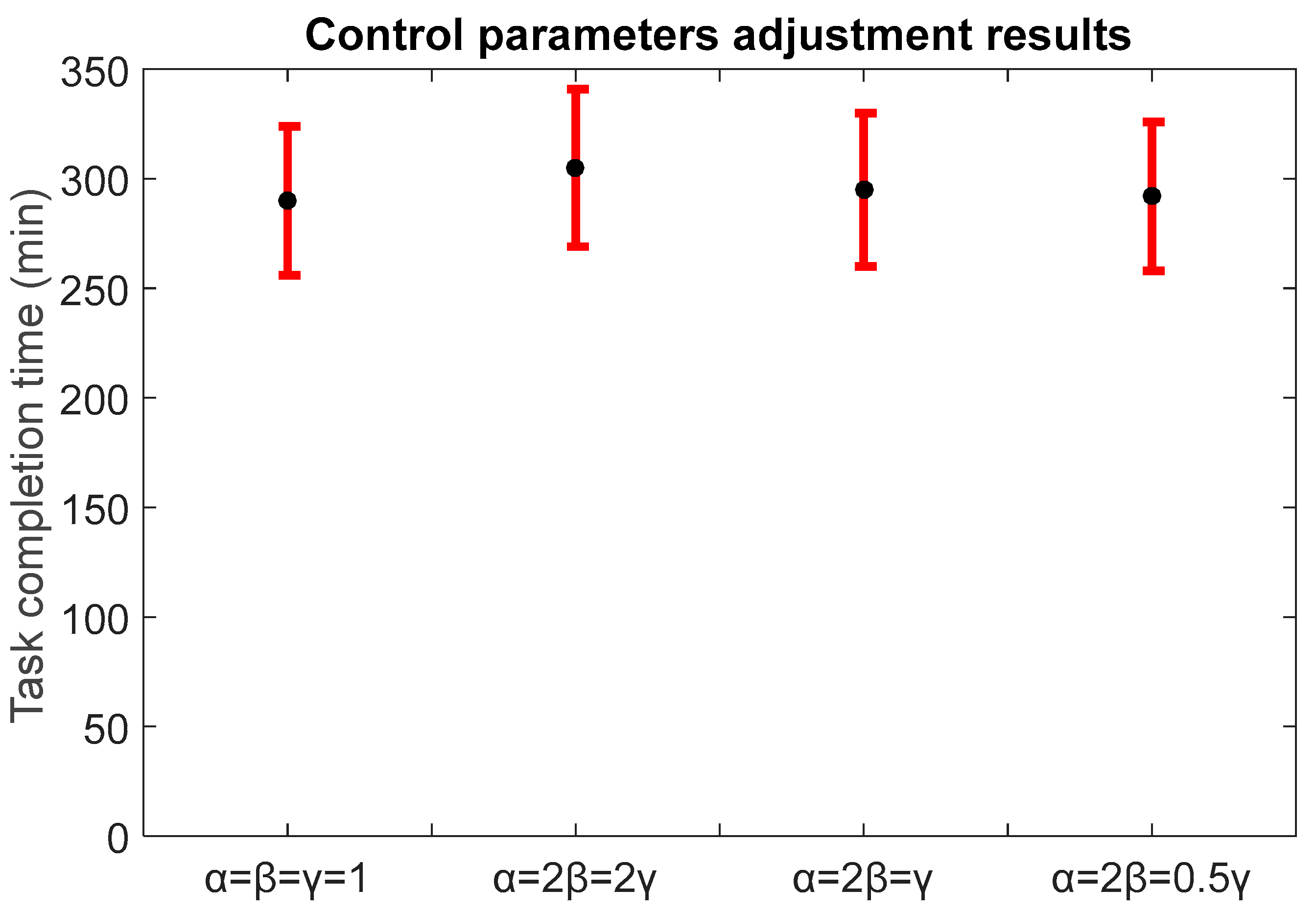
A simulation with different values of α, β, and γ was conducted and revealed that the setup of α = β = γ = 1 achieved the best results (291.21 min) in terms of task completion time (Figure 8), outperforming systems with α = 2β = 2γ, α = 2β = γ and α = 2β = 0.5γ by 5.2%, 1.8%, and 0.7%, respectively (p < 0.05). These parameters play an important role in defining system’s overall behavior. For example, they can be set to prioritize closer tasks and reduce traveled distances at the expense of the execution time (useful feature for mobile multi-sensor systems). Allocating the tasks according to their priorities would decrease the execution time of crucial tasks at the expense of longer execution of less important tasks.
7. Conclusions
The MDBA algorithm efficiently allocates a large group of heterogeneous sensors to upcoming tasks, which are unknown in their spatial and temporal distributions; it provides scalability in terms of the number of tasks and sensors. It resulted in statistically significant 7% better performance in terms of task completion time using 100 sensors in uniform distribution, with respect to the second-best algorithm, and 19% better with respect to greedy algorithm, which performed the worst. The control parameters, α, β, and γ provide a mechanism to adjust the sensor swarm behavior and bias importance of the priority, distance and sensors performance respectively. A simulation of these parameters revealed that the best task completion time was achieved by using α = β = γ = 1. Uniform distribution of the sensors resulted in better system performance with the shortest task completion time, with 5% and 26% improvement from the grid and normal distributions, respectively (p < 0.05).
Homogeneous agents can be treated as a sub-problem. In this case, MDBA and DBA will report the same results (see [48] for example, of DBA implementation to homogeneous agents).
The limitation of this work is that the proposed algorithm MDBA has a probabilistic nature. Due to its decentralized nature, MDBA cannot guarantee an optimal solution, but it can provide sub-optimal solutions to NP-hard problems; it yielded better results in comparison to other algorithms analyzed in this paper. The decentralized decision making process of the agents ensures system robustness and reliability in case of single sensor failure.
In real-world applications, communication delay between sensors must be considered because it can increase task completion time.
The proposed algorithm could be applied in many applications with distributed sensors, such as facility monitoring in industry, fire monitoring with in-field distributed sensors, surveillance, military and homeland security, among others. Furthermore, this work can be expanded to multi-agent and multi-robot applications such as search and rescue missions and path formation. Ongoing work is dealing with additional applications of the algorithm such as supply network security monitoring by a distributed sensor network and police officers tasks allocation optimization dealing with various crime incidents.
Acknowledgments
This research was partially supported by Ben-Gurion University of the Negev through the Helmsley Charitable Trust, the Agricultural, Biological and Cognitive Robotics Initiative, the Marcus Endowment Fund, and the Rabbi W. Gunther Plaut Chair in Manufacturing, by the PRISM Center at Purdue University, by the Beatriu de Pinós grant No. 2013 BP-B 00239 of the Catalan Government and by the EU-funded Marie Curie Actions COFUND programme.
Author Contributions
I.T. developed and implemented the algorithms, designed the simulations, analyzed the data and wrote the paper; A.J., S.Y.N. and Y.E. contributed with the algorithm development, analyses planning and manuscript writing.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Anastasi, G.; Conti, M.; Di Francesco, M.; Passarella, A. Energy conservation in wireless sensor networks: A survey. Ad Hoc Netw. 2009, 7, 537–568. [Google Scholar] [CrossRef]
- Rowaihy, H.; Eswaran, S.; Johnson, M.; Verma, D.; Bar-Noy, A.; Brown, T.; Porta, T.L. A survey of sensor selection schemes in wireless sensor networks. Proc. SPIE 2007, 6562, 65621A. [Google Scholar]
- Civelek, M.; Yazici, A. Automated Moving Object Classification in Wireless Multimedia Sensor Networks. IEEE Sens. J. 2016, 17, 1116–1131. [Google Scholar] [CrossRef]
- Bian, F.; Kempe, D.; Govindan, G. Utility-based sensor selection. In Proceedings of the IEEE Conference on Information Processing in Sensor Network, Nashville, TN, USA, 19–21 April 2006; pp. 11–18. [Google Scholar]
- Akyildiz, F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Tkach, I.; Edan, Y.; Jevtić, A.; Nof, S.Y. Automatic Multi-Sensor Task Allocation using Modified Distributed Bees Algorithm. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Manchester, UK, 13–16 October 2013; pp. 1401–1406. [Google Scholar]
- Panta, L.; Teodorovic, D. Transportation modeling: An artificial life approach. In Proceedings of the 14th IEEE International Conference on Tools with Artificial Intelligence, Washington, DC, USA, 4–6 November 2002; pp. 216–223. [Google Scholar]
- Zlot, R.; Stentz, A.; Dias, M.B.; Thayer, S. Multi-robot exploration controlled by a market economy. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; pp. 3016–3023. [Google Scholar]
- Werger, B.; Matarić, M.J. Broadcast of Local Eligibility for Multi-Target Observation. In Distributed Autonomous Robotic System; Parker, L.E., Bekey, G., Barhen, J., Eds.; Springer: Berlin, Germany, 2000; Volume 4, pp. 347–356. [Google Scholar]
- Xiong, N.; Svensson, P. Multi-sensor management for sensor fusion: Issues and approaches. Inf. Fusion 2002, 3, 163–186. [Google Scholar] [CrossRef]
- Colby, M.; Chung, J.J.; Tumer, K. Implicit adaptive multi-robot coordination in dynamic environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5168–5173. [Google Scholar]
- Gerkey, B.P.; Matarić, M.J. Sold!: Auction methods for multirobot coordination. IEEE Trans. Robot. Autom. 2002, 18, 758–768. [Google Scholar] [CrossRef]
- Guerrero, J.; Oliver, G. Multi-robot coalition formation in real-time scenarios. J. Robot. Auton. Syst. 2012, 60, 1295–1307. [Google Scholar] [CrossRef]
- Tolmidis, A.T.; Petrou, L. Multi-objective optimization for dynamic task allocation in a multi-robot system. Eng. Appl. Artif. Intell. 2013, 26, 1458–1468. [Google Scholar] [CrossRef]
- Vachtsevanos, G.; Tang, L.; Reinmann, J. An Intelligent Approach to Coordinated Control of Multiple Unmanned Aerial Vehicles. In Proceedings of the American Helicopter Society 60th Annual Forum, Baltimore, MD, USA, 7–10 June 2004. [Google Scholar]
- He, K.; Jia, M.; Xu, Q. Optimal sensor deployment for manufacturing process monitoring based on quantitative cause-effect graph. IEEE Trans. Autom. Sci. Eng. 2016, 13, 963–975. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, Q.; An, Z.; Lv, P.; Zhao, L. Distributed multi-target tracking based on the K-MTSCF algorithm in camera networks. IEEE Sens. J. 2016, 16, 5481–5490. [Google Scholar] [CrossRef]
- Matarić, M.J.; Sukhatme, G.S.; Âstergaard, E.H. Multi-robot task allocation in uncertain environments. Auton. Robots 2003, 14, 255–263. [Google Scholar] [CrossRef]
- Michael, N.; Zavlanos, M.M.; Kumar, V.; Pappas, G.J. Distributed multi-robot task assignment and formation control. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 128–133. [Google Scholar]
- Williams, N.P.; Liu, Y.; Nof, S.Y. TestLAN approach and protocols for the integration of distributed assembly and test networks. Int. J. Prod. Res. 2002, 40, 4505–4522. [Google Scholar] [CrossRef]
- Gerkey, B.P.; Matarić, M.J. A market-based formulation of sensor-actuator network coordination. In Proceedings of the AAAI Spring Symposium on Intelligent Embedded and Distributed Systems, Stanford, CA, USA, 25–27 March 2002; pp. 21–26. [Google Scholar]
- Anussornnitisarn, P.; Nof, S.Y.; Etzion, O. Decentralized Control of Cooperative and Autonomous agents for solving the Distributed Resource Allocation Problem. Int. J. Prod. Econ. 2005, 98, 114–128. [Google Scholar] [CrossRef]
- Joordens, M.A.; Jamshidi, M. Consensus control for a system of under-water swarm robots. IEEE Syst. 2010, 4, 65–73. [Google Scholar] [CrossRef]
- Jones, C.; Shell, D.; Matarić, M.J.; Gerkey, B.P. Principled approaches to the design of multi-robot systems. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2004), Sendai, Japan, 28 September–2 October 2004. [Google Scholar]
- Nanjanath, M. Decision and coordination strategies for RoboCup rescue agents. In Proceedings of the Simulation, Modeling, and Programming for Autonomous Robots, Darmstadt, Germany, 15–18 November 2010; pp. 473–484. [Google Scholar]
- Lerman, K.; Jones, C.; Galstyan, A.; Matarić, M.J. Analysis of dynamic task allocation in multi-robot systems. Int. J. Robot. Res. 2006, 25, 225–242. [Google Scholar] [CrossRef]
- Parker, L.E.; Tang, F. Building multirobot coalitions through automated task solution synthesis. Proc. IEEE. 2006, 94, 1289–1305. [Google Scholar] [CrossRef]
- Chen, J.; Dong, S. Coalition-based approach to task allocation of multiple robots with resource constraints. IEEE Trans. Autom. Sci. Eng. 2012, 9, 516–528. [Google Scholar] [CrossRef]
- Ko, H.S.; Nof, S.Y. Design and application of task administration protocols for collaborative production and service systems. Int. J. Prod. Econ. 2012, 135, 177–189. [Google Scholar]
- Greve, G.H.; Hopkinson, K.M.; Lamont, G.B. Evolutionary sensor allocation for the Space Surveillance Network. J. Def. Model. Simul. 2017. [Google Scholar] [CrossRef]
- Dorigo, M.; Birattari, M.; Stützle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Bayındır, L. A review of swarm robotics tasks. Neurocomputing 2016, 172, 292–321. [Google Scholar] [CrossRef]
- Garnier, S.; Gautrais, J.; Theraulaz, G. The biological principles of swarm intelligence. Swarm Intell. 2007, 1, 3–31. [Google Scholar] [CrossRef]
- Blum, C.; Groß, G. Swarm intelligence in optimization and robotics. In Springer Handbook of Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2015; pp. 1291–1309. [Google Scholar]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- Ball, M.G.; Qela, B.; Wesolkowski, S. A Review of the Use of Computational Intelligence in the Design of Military Surveillance Networks. In Recent Advances in Computational Intelligence in Defense and Security; Springer International Publishing: Cham, Switzerland, 2016; pp. 663–693. [Google Scholar]
- Bonabeau, E.; Dorigo, M.; Theraulaz, G. Swarm Intelligence: From Natural to Artificial Systems; Oxford University Press, Inc.: New York, NY, USA, 1999. [Google Scholar]
- Groβ, R.; Nouyan, S.; Bonani, M.; Mondada, F.; Dorigo, M. Division of labor in self-organized groups. In Proceedings of the 10th Intnational Conference on Simulation of Adaptive Behavior: From Animals to Animats, Osaka, Japan, 7–12 July 2008; Springer: Berlin, Germany, 2008; pp. 426–436. [Google Scholar]
- Upadhyay, D.; Banerjee, P. An Energy Efficient Proposed Framework for Time Synchronization Problem of Wireless Sensor Network. In Information Systems Design and Intelligent Applications; Springer: Visakhapatnam, India, 2016; pp. 377–385. [Google Scholar]
- Berman, S.; Halasz, A.; Kumar, V.; Pratt, S. Bio-inspired group behaviors for the deployment of a swarm of robots to multiple destinations. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 2318–2323. [Google Scholar]
- Tan, Y.; Ding, K. Survey of GPU-Based Implementation of Swarm Intelligence Algorithms. IEEE Trans. Cybern. 2016, 46, 2028–2041. [Google Scholar] [CrossRef] [PubMed]
- Labella, T.H.; Dorigo, M.; Deneubourg, J.L. Division of labor in a group of robots inspired by ants’ foraging behavior. ACM Trans. Auton. Adapt. Syst. 2006, 1, 4–25. [Google Scholar] [CrossRef]
- Zhang, S.Z.; Lee, C.K.M. An Improved Artificial Bee Colony Algorithm for the Capacitated Vehicle Routing Problem. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Kowloon, China, 9–12 October 2015; pp. 2124–2128. [Google Scholar]
- Xue, B.; Zhang, M.; Browne, W. Particle swarm optimization for feature selection in classification: A multi-objective approach. IEEE Trans. Cybern. 2013, 43, 1656–1671. [Google Scholar] [CrossRef] [PubMed]
- Fu, B.; Liang, Y.; Chen, C. Bio-inspired Group Modeling and Analysis for Intruder Detection in Mobile Sensor/Robotic Networks. IEEE Trans. Cybern. 2015, 45, 103–115. [Google Scholar] [CrossRef] [PubMed]
- Quijano, N.; Passino, K.M. Honey bee social foraging algorithms for resource allocation: Theory and application. Eng. Appl. Artif. Intell. 2010, 23, 845–861. [Google Scholar] [CrossRef]
- Jevtić, A.; Gutierrez, A.; Andina, D.; Jamshidi, M. Distributed Bees Algorithm for Task Allocation in Swarm of Robots. IEEE Syst. J. 2012, 6, 296–304. [Google Scholar] [CrossRef] [Green Version]
- Senanayake, M.; Senthooran, I.; Barca, J.C.; Chung, H.; Kamruzzaman, J.; Murshed, M. Search and tracking algorithms for swarms of robots: A survey. Robot. Auton. Syst. 2016, 75, 422–434. [Google Scholar] [CrossRef]
- Eberhart, R.C.; Shi, Y.; Kennedy, J. Swarm Intelligence; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Jevtić, A.; Gutiérrez, A. Distributed bees algorithm parameters optimization for a cost efficient target al.location in swarms of robots. Sensors 2011, 11, 10880–10893. [Google Scholar] [CrossRef] [PubMed]
- Gutiérrez, A.; Campo, A.; Monasterio-Huelin, F.; Magdalena, L.; Dorigo, M. Collective decision-making based on social odometry. Neural Comput. Appl. 2010, 19, 807–823. [Google Scholar] [CrossRef] [Green Version]
- Ducatelle, F.; Di Caro, G.A.; Pinciroli, C.; Mondada, F.; Gambardella, L. Communication assisted navigation in robotic swarms: Self-organization and cooperation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 4981–4988. [Google Scholar]
- Dias, M.B.; Zlot, R.; Kalra, N.; Stentz, A. Market-based multirobot coordination: A survey and analysis. Proc. IEEE 2006, 94, 1257–1270. [Google Scholar] [CrossRef]
- Tang, F.; Parker, L.E. Asymtre: Automated synthesis of multi-robot task solutions through software reconfiguration. In Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 1501–1508. [Google Scholar]
- Neapolitan, R.E.; Naimipour, K. Foundations of Algorithms; D. C. Heath and Company: Lexington, MA, USA, 1996. [Google Scholar]
- Coello, C.A.; Lamont, G.B.; Van Veldhuizen, D.A. Evolutionary Algorithms for Solving Multi-Objective Problems; Springer: New York, NY, USA, 2007; Volume 5, pp. 21–22. [Google Scholar]
- Tkach, I.; Edan, Y.; Nof, S.Y. Multi-sensor task allocation framework for supply networks security using task administration protocols. Int. J. Prod. Res. 2017, 55, 5202–5224. [Google Scholar] [CrossRef]
- Tang, Z.; Ozguner, U. Motion Planning for Multitarget Surveillance with Mobile Sensor Agents. IEEE Trans. Robot. 2005, 21, 898–908. [Google Scholar] [CrossRef]
- Lee, C.K.H.; Ho, G.T.S.; Choy, K.L.; Pang, G.K.H. A RFID-based Recursive Process Mining System for Quality Assurance in the Garment Industry. Int. J. Prod. Res. 2014, 52, 4216–4238. [Google Scholar] [CrossRef]
- Zhang, J.; Li, W.; Han, N.; Kan, J. Forest Fire Detection System Based on a ZigBee Wireless Sensor Network. Front. For. China 2008, 3, 369–374. [Google Scholar] [CrossRef]
- Robin, C.; Lacroix, S. Multi-robot target detection and tracking: Taxonomy and survey. Auton. Robots 2016, 40, 729–760. [Google Scholar] [CrossRef]
- Byers, J.; Nasser, G. Utility-Based Decision-Making in Wireless Sensor Networks. In Proceedings of the 1st ACM international symposium on Mobile ad hoc networking & computing, Boston, MA, USA, 11 August 2000; pp. 143–144. [Google Scholar]
- Yoon, Y.; Kim, Y.H. An efficient genetic algorithm for maximum coverage deployment in wireless sensor networks. IEEE Trans. Cybern. 2013, 43, 1473–1483. [Google Scholar] [CrossRef] [PubMed]
- Jeong, W.; Nof, S.Y. A collaborative sensor network middleware for automated production systems. Int. J. Comput. Ind. Eng. 2009, 57, 106–113. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Tran. Syst. Man Cybern. B Cybern. 1996, 26, 29–41. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
A monitoring sensor network with sensors, tasks and sensors DB that informs operators about the completed tasks, but does not contribute to the task allocation algorithm.
Figure 1.
A monitoring sensor network with sensors, tasks and sensors DB that informs operators about the completed tasks, but does not contribute to the task allocation algorithm.

Figure 2.
Simulation map of the arena with three sensors distributions—(a) grid distribution; (b) uniformly distributed random deployment; (c) normally distributed random deployment; deployed sensors are marked as blue circles, incomplete tasks are marked by red dots, and completed tasks are marked by black dots.
Figure 2.
Simulation map of the arena with three sensors distributions—(a) grid distribution; (b) uniformly distributed random deployment; (c) normally distributed random deployment; deployed sensors are marked as blue circles, incomplete tasks are marked by red dots, and completed tasks are marked by black dots.

Figure 3.
Number of unallocated tasks for a different number of deployed sensors for each algorithm with uniformly distributed random sensors deployment. The dots represent mean values of 100 independent runs and the bars represent standard deviation values.
Figure 3.
Number of unallocated tasks for a different number of deployed sensors for each algorithm with uniformly distributed random sensors deployment. The dots represent mean values of 100 independent runs and the bars represent standard deviation values.

Figure 4.
Modified Distributed Bees Algorithm (MDBA) Performance based on different sensor distributions.
Figure 4.
Modified Distributed Bees Algorithm (MDBA) Performance based on different sensor distributions.

Figure 5.
Average performance comparison of four sensor allocation algorithms. Black dots represent mean values of 100 independent runs and red bars represent standard deviation values.
Figure 5.
Average performance comparison of four sensor allocation algorithms. Black dots represent mean values of 100 independent runs and red bars represent standard deviation values.

Figure 6.
Average number of treated tasks by each sensor in four algorithms.

Figure 7.
Simulation map of the arena with subsequently introduced sensors—initially deployed sensors are marked as blue circles, deployed sensors at phase 1 are marked as green circles, deployed sensors at phase 2 are marked as yellow circles, removed sensors at phase 3 are marked by red circles, incomplete tasks are marked by red dots and completed tasks are marked by black dots.
Figure 7.
Simulation map of the arena with subsequently introduced sensors—initially deployed sensors are marked as blue circles, deployed sensors at phase 1 are marked as green circles, deployed sensors at phase 2 are marked as yellow circles, removed sensors at phase 3 are marked by red circles, incomplete tasks are marked by red dots and completed tasks are marked by black dots.

Figure 8.
Average performance comparison of MDBA algorithm with different α, β and γ values. α = β = γ = 1; α = 2β = 2γ; α = 2β = γ; α = 2β = 0.5γ.
Figure 8.
Average performance comparison of MDBA algorithm with different α, β and γ values. α = β = γ = 1; α = 2β = 2γ; α = 2β = γ; α = 2β = 0.5γ.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Summary of parameter values for simulation analysis.
| Parameters | Values |
|---|---|
| Area dimensions | 100 × 100 m |
| Number of sensors (‘bees’) | 20, 40, 60, 80, 100 |
| Number of tasks | 200 |
| Task completion time | Randomly distributed from 0 to 10 min |
| Simulation duration | 200 steps |
| Tasks location | Uniformly distributed at random |
| Control parameters | α = β = γ = 1, α = 2β = 2γ, α = 2β = γ, α = 2β = 0.5γ |
| Sensors location | Uniformly distributed random |
| Normally distributed random | |
| Grid deployment | |
| Tasks arrival time | Every 1 step |
| Sensors range coverage | Predefined from 15 to 45 m |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Tkach, I.; Jevtić, A.; Nof, S.Y.; Edan, Y. A Modified Distributed Bees Algorithm for Multi-Sensor Task Allocation. Sensors 2018, 18, 759. https://doi.org/10.3390/s18030759
AMA Style
Tkach I, Jevtić A, Nof SY, Edan Y. A Modified Distributed Bees Algorithm for Multi-Sensor Task Allocation. Sensors. 2018; 18(3):759. https://doi.org/10.3390/s18030759
Chicago/Turabian StyleTkach, Itshak, Aleksandar Jevtić, Shimon Y. Nof, and Yael Edan. 2018. "A Modified Distributed Bees Algorithm for Multi-Sensor Task Allocation" Sensors 18, no. 3: 759. https://doi.org/10.3390/s18030759
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.