Improved Seam-Line Searching Algorithm for UAV Image Mosaic with Optical Flow



Abstract
:1. Introduction
2. Related Work
2.1. Methods Based on Dynamic Programming
2.2. Methods Based on Optical Flow
3. Methodology
3.1. Classic Duplaquet’s Method
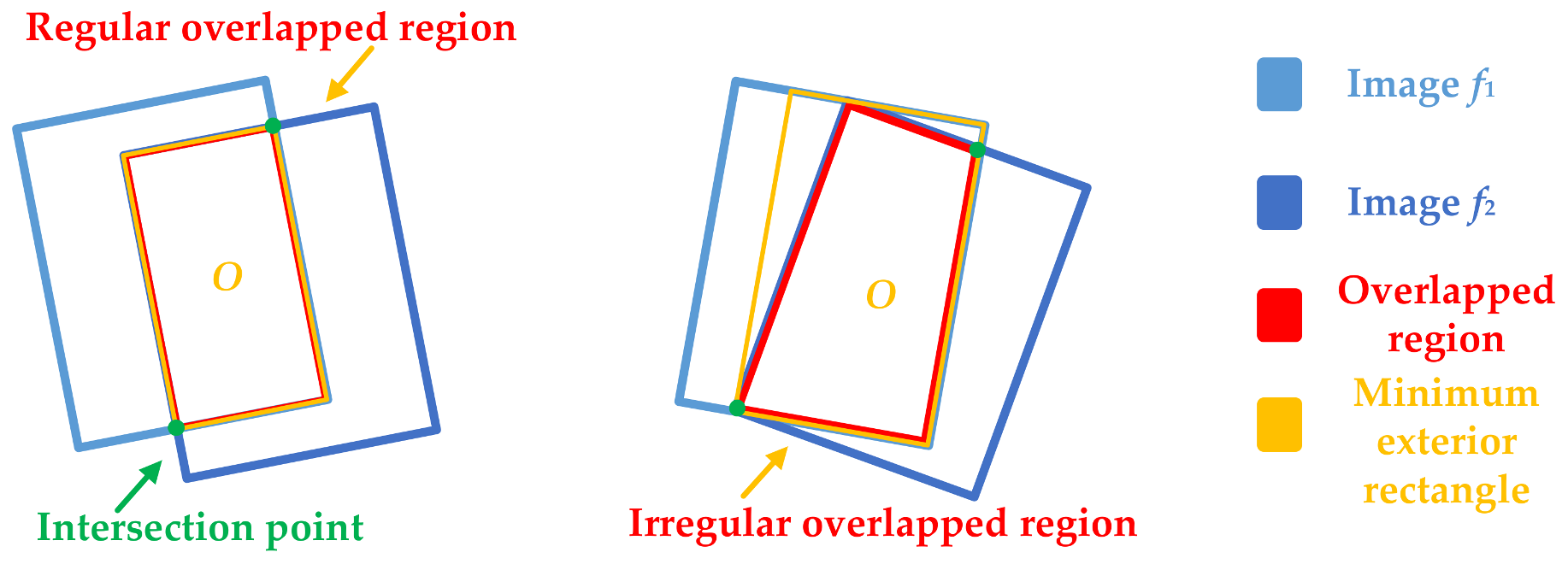
3.2. Problems Analysis of Duplaquet’s Method
3.3. Improved Seam-Line Search Method
3.3.1. Gradient Calculation
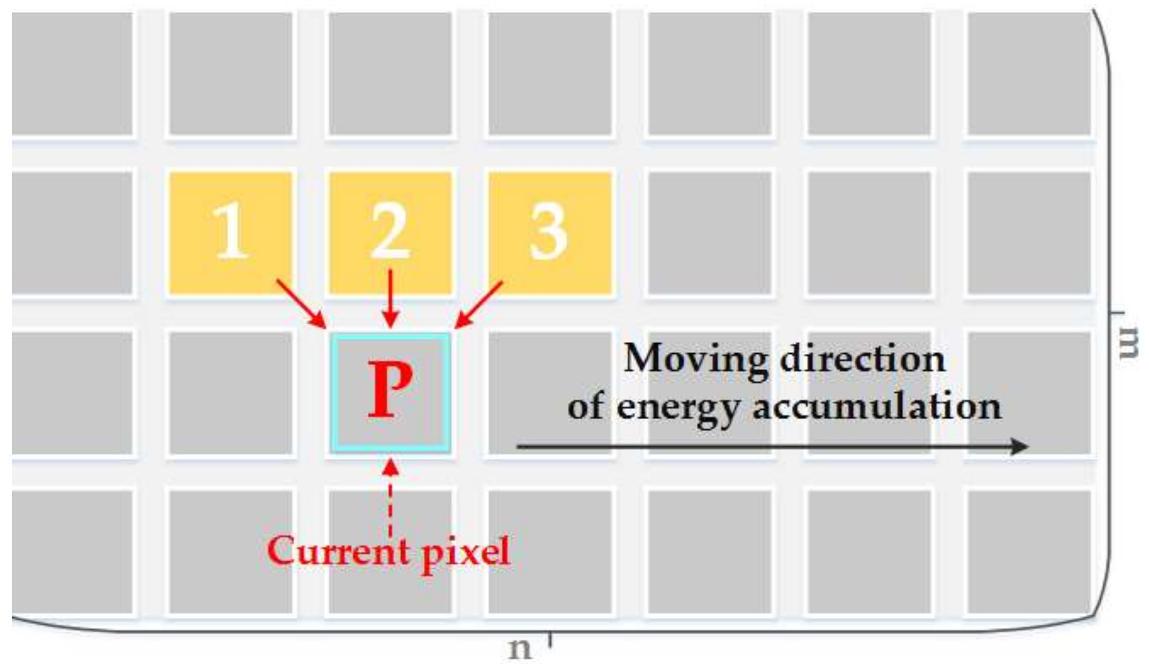
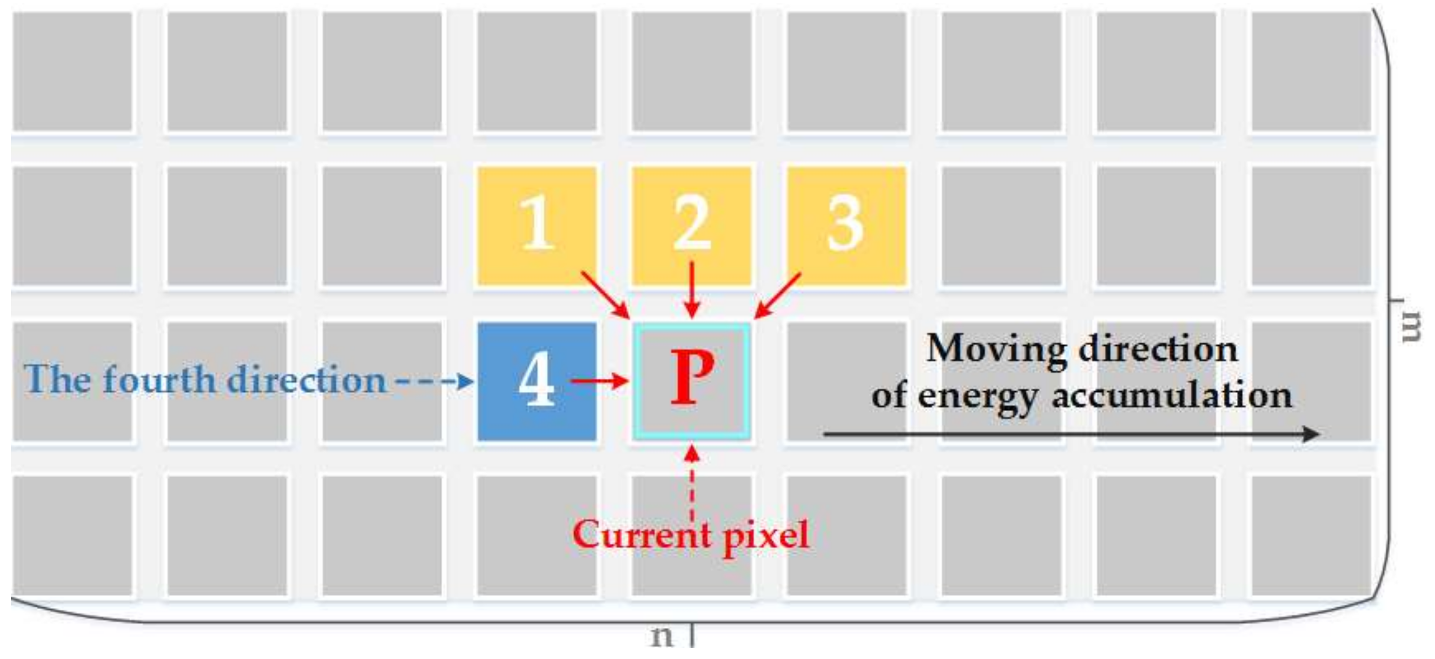
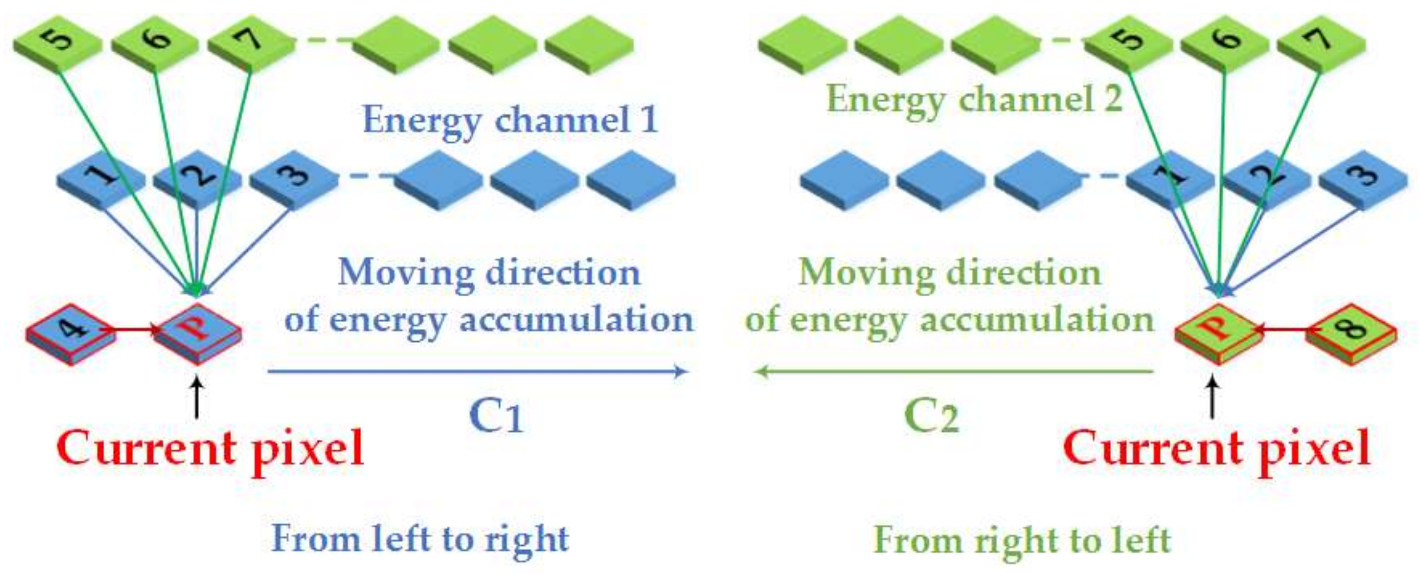
3.3.2. Directionality of Energy Accumulation
3.3.3. Calculation of Optical Flow Value of Pixels in the Overlapped Region
3.3.4. Energy Function
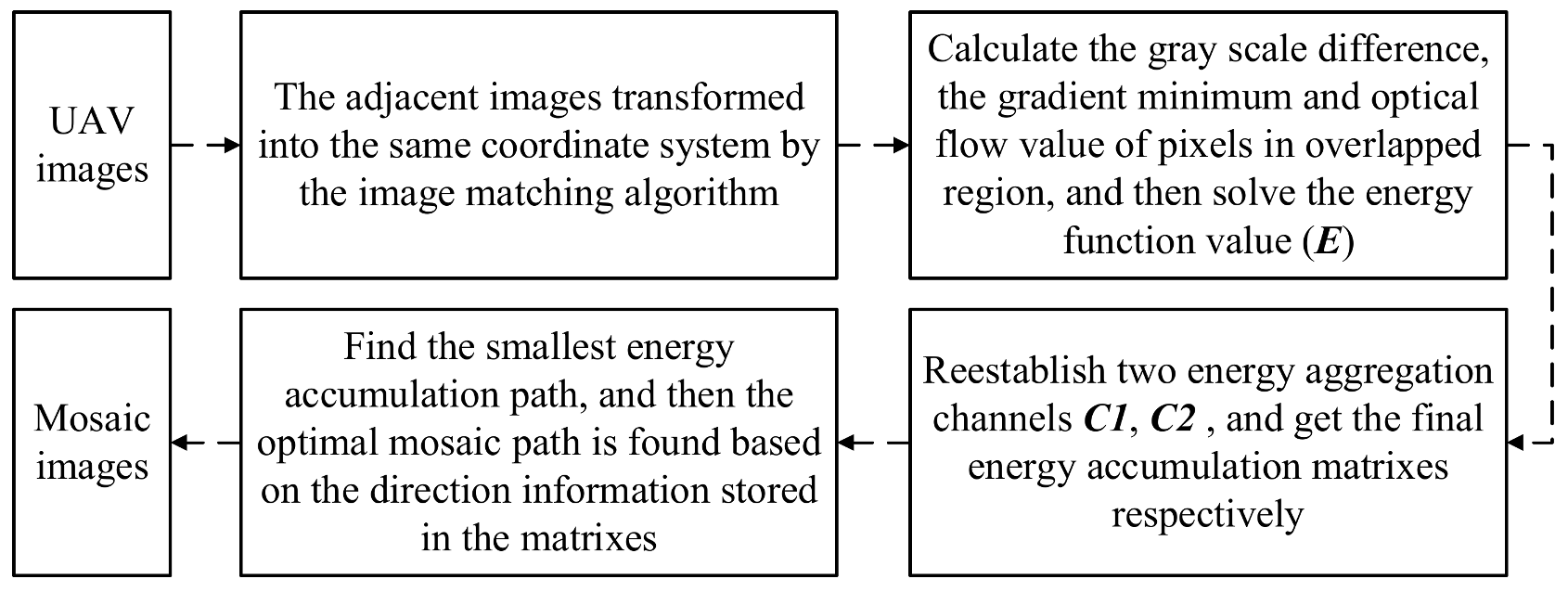
3.3.5. Computation Procedure
4. Experimental Results Analysis
4.1. Experimental Environment and Data
4.2. Experimental Results Analysis
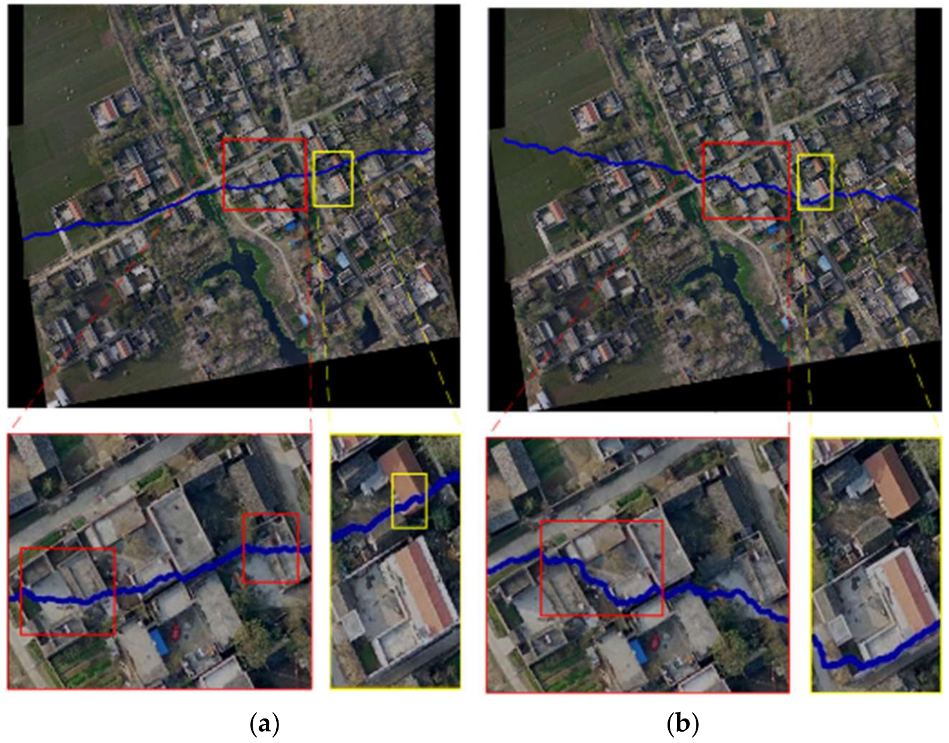
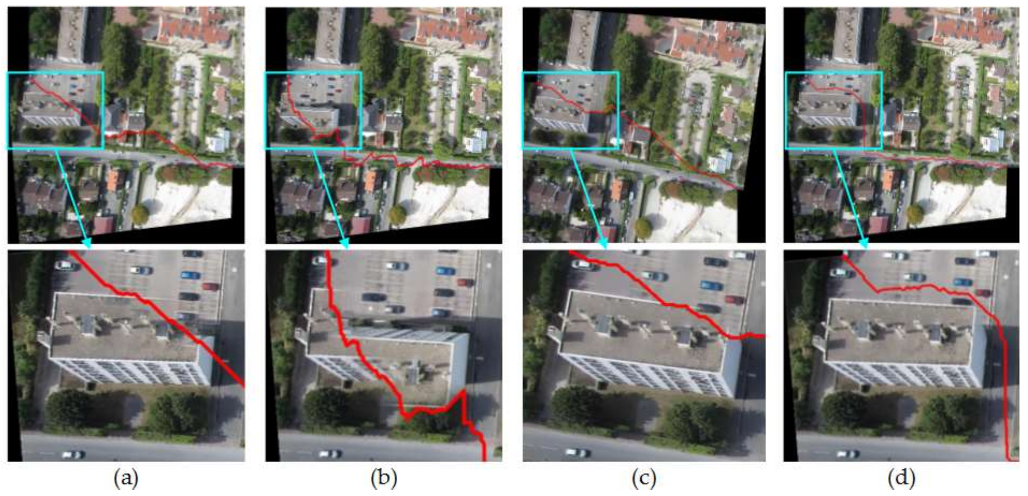
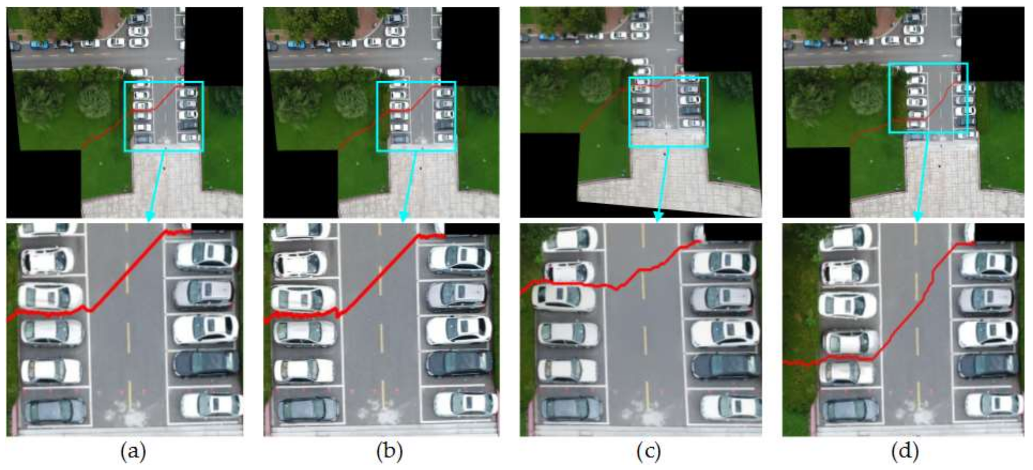
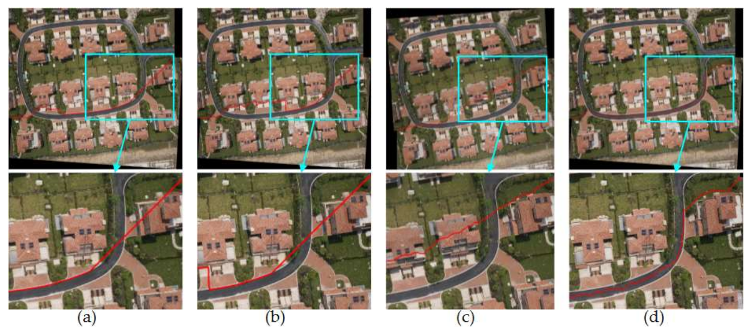
4.2.1. Comparison of Mosaic Results with Four Different Image Pairs
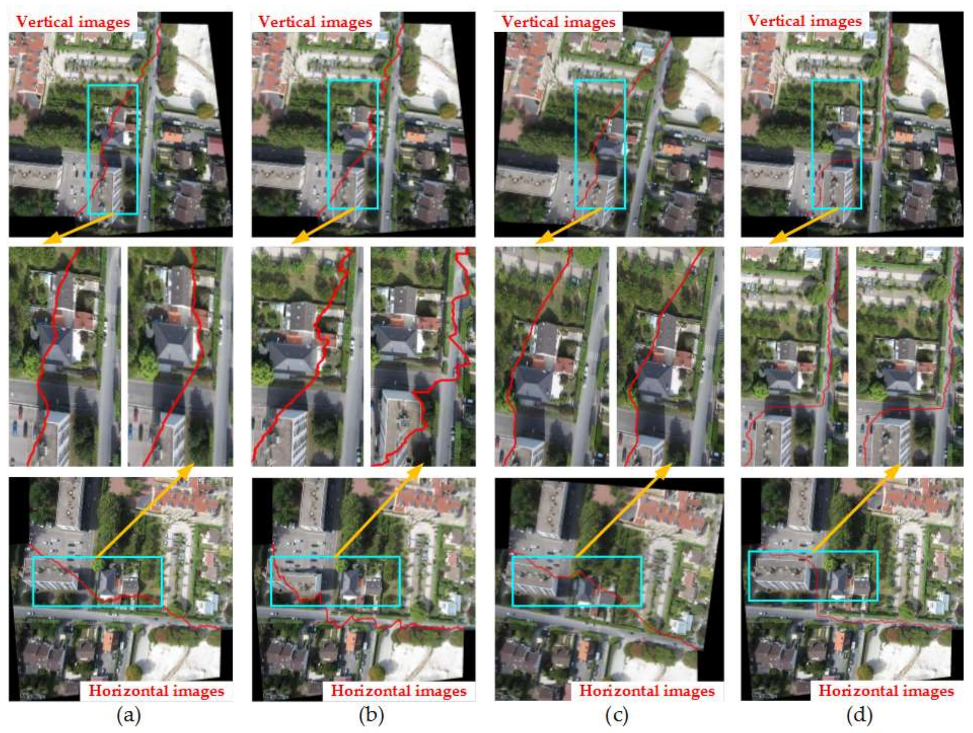
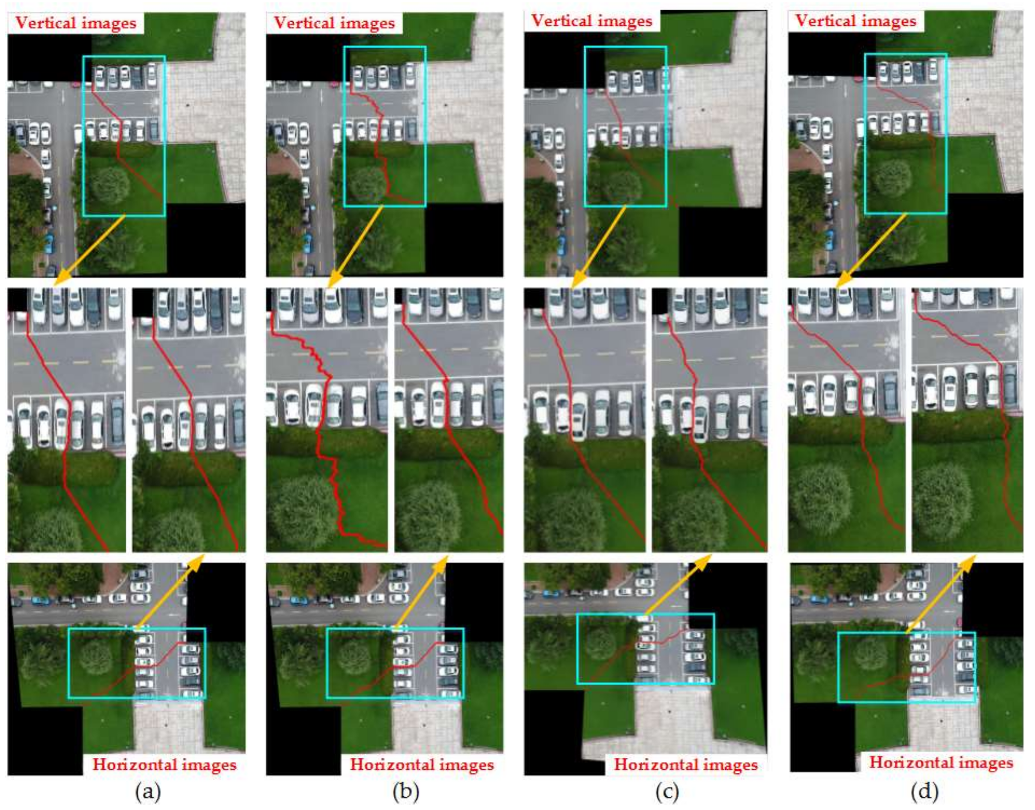
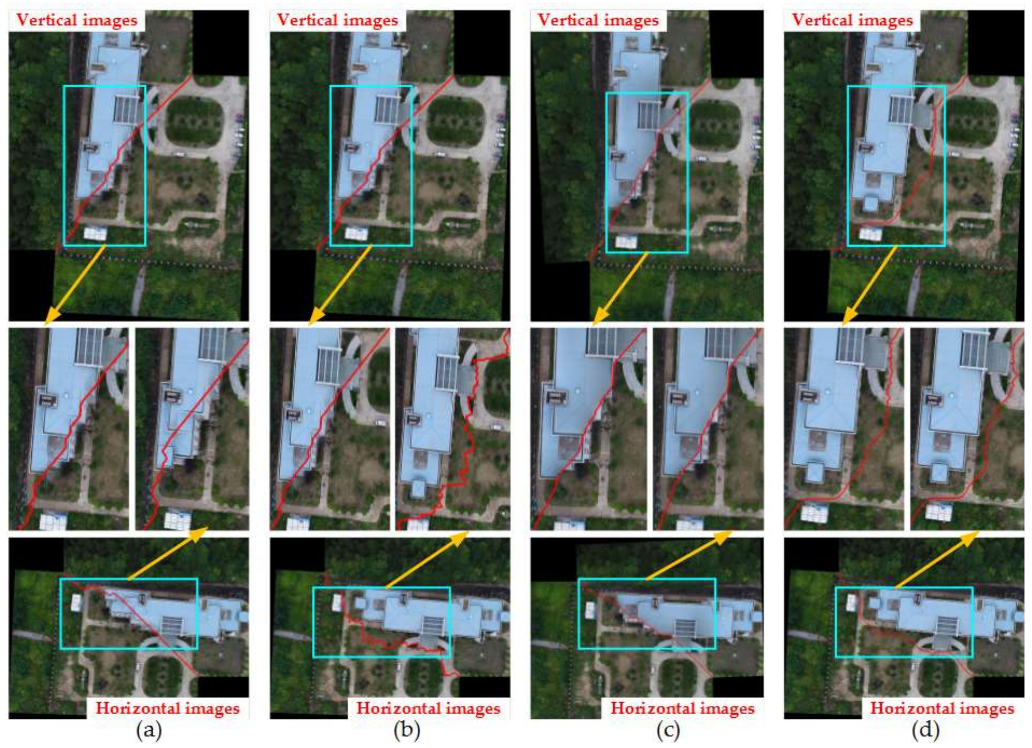
4.2.2. Comparison of Four Methods under the Condition of Image Rotation
4.2.3. Efficiency Comparison of Our Energy Accumulation Processing
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, S.; Laefer, D.; Mangina, E.; Mangina, E. State of Technology Review of Civilian UAVs. Recent Pat. Eng. 2016, 10, 160–174. [Google Scholar] [CrossRef]
- Byrne, J.; Keeffe, E.; Lenon, D.; Laefer, D. 3D reconstructions using unstabilized video footage from an unmanned aerial vehicle. J. Imaging 2017, 3, 15. [Google Scholar] [CrossRef]
- Sun, H.; Li, L.; Ding, X. The precise multimode GNSS positioning for UAV and its application in large scale photogrammetry. Geo-Spat. Inf. Sci. 2016, 19, 188–194. [Google Scholar] [CrossRef]
- LI, D.; Li, M. Research advance and application prospect of unmanned aerial vehicle remote sensing system. Geomat. Inf. Sci. Wuhan Univ. 2014, 39, 505–513. [Google Scholar]
- Zhang, W.; Li, M.; Guo, B.; Li, D.; Guo, G. Rapid texture optimization of three-dimensional urban model based on oblique images. Sensors 2017, 17, 911. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Li, D.; Fan, D. A study on automatic UAV image method for paroxysmal disaster. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, B6, 123–128. [Google Scholar] [CrossRef]
- Wang, W.; Michale, K. A variational approach for image mosaic. SIAM J. Imaging Sci. 2013, 6, 1318–1344. [Google Scholar] [CrossRef]
- Tao, M.; Johnson, M.; Paris, S. Error tolerant image compositing. Int. J. Comput. Vis. 2013, 103, 178–189. [Google Scholar] [CrossRef]
- Ghosh, D.; Kaabouch, N. A survey on image mosaicing techniques. J. Vis. Commun. Image Represent. 2016, 34, 1–11. [Google Scholar] [CrossRef]
- Bu, S.; Yong, Z.; Gang, W.; Liu, Z. Map2DFusion: Real-time incremental UAV image mosaicing based on monocular slam. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 4564–4571. [Google Scholar]
- Chon, J.; Kim, H.; Lin, C. Seam-line Determination for Image Mosaicking: A Technique Minimizing the Maximum Local Mismatch and the Global Cost. ISPRS J. Photogramm. Remote Sens. 2010, 65, 86–92. [Google Scholar] [CrossRef]
- Zhao, Y.; Han, T.; Feng, S.; Miao, C. Remote Sensing Image Mosaic by Incorporating Segmentation and the Shortest Path. Geo-Inform. Resour. Manag. Sustain. Ecosyst. 2013, 398, 684–691. [Google Scholar]
- Pan, J.; Zhou, Q.; Wang, M. Seamline Determination Based on Segmentation for Urban Image Mosaicking. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1335–1339. [Google Scholar] [CrossRef]
- Amrita; Neeru, N. A Novel Approach for Medical Image Stitching Using Ant Colony Optimization. J. Eng. Res. Appl. 2014, 4, 21–28. [Google Scholar]
- Shashank, K.; Sivachaitanya, N.; Mainkanta, G.; Balaji, C.; Murthy, V. A Survey and Review over Image Alignment and Stitching Methods. J. Electron. Commun. Technol. 2014, 5, 50–52. [Google Scholar]
- Aghamohamadnia, M.; Abedini, A. A Morphology-stitching Method to Improve Landsat SLC-off Images with Stripes. Geodesy Geodyn. 2014, 5, 27–33. [Google Scholar] [CrossRef]
- Jufriadif, N. Edge Detection on Objects of Medical image with Enhancement Multiple Morphological Gradient method. In Proceedings of the International Conference on Electrical Engineering, Boumerdes, Algeria, 29–31 October 2017; pp. 1–7. [Google Scholar]
- Chen, J.; Cai, Z.; Lai, J.; Xie, X. Fast Optical Flow Estimation Based on the Split Bregman Method. IEEE Trans. Circuits Syst. Video Technol. 2018, 28, 664–678. [Google Scholar] [CrossRef]
- Liu, B.; Wei, W.; Pan, Z.; Wang, S. Fast Algorithms for large Displacement Variation Optical Flow Computation. J. Image Graph. 2017, 22, 66–74. [Google Scholar]
- Clerc, M.; Mallat, S. The Texture Gradient Equation for Recovering Shape from Texture. IEEE Trans. Pattren Anal. Mach. Intell. 2013, 24, 536–549. [Google Scholar] [CrossRef]
- Zhou, X.; Yang, C.; Yu, W. Moving Object Detecting Contiguous Outliers in the Low-Rank Representation. IEEE Trans. Pattren Anal. Mach. Intell. 2013, 35, 597–610. [Google Scholar] [CrossRef] [PubMed]
- Xue, T.; Rubinstein, M.; Wadhwa, N.; Levin, A.; Durand, F. Refraction Wiggles for Measuring Fluid Depth and Velocity from Video. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; Volume 8691, pp. 767–782. [Google Scholar]
- Butler, D.; Wulff, J.; Stanley, G.; Black, M. A Naturalistic Open Source Movie for Optical Flow Evaluation. In Proceedings of the European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; Volume 7577, pp. 611–625. [Google Scholar]
- Liu, C.; Yuen, J.; Torralba, A. SIFT Flow: Dense Correspondence across Scenes and Its Applications. Dense Image Corresp. Comput. Vis. 2016, 33, 15–49. [Google Scholar]
- Hildreth, E.; Koch, C. The Analysis of Visual Motion: From Computational Theory to Neuronal Mechanisms. Annu. Rev. Neurosci. 2014, 10, 477–533. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Yuan, F.; Kou, Y. An image method based on the seamline and dynamic datum. Bull. Surv. Mapp. 2014, 9, 42. [Google Scholar]
- Li, W.; Zhao, S.; Zhang, W.; Liu, X.; Yu, G. A Mosaic Method for UAV Images Based on Filtering. Geomat. Inf. Sci. Wuhan Univ. 2017, 42, 1–8. [Google Scholar]
- Duplaquet, L. Building Large Images Mosaics with Invisible Seam-lines. Proceed SPIE 1998, 3387, 369–377. [Google Scholar]
- Li, Z.; Zheng, J.; Zhu, Z.; Yao, W.; Wu, S. Weighted Guided Image Filtering. IEEE Trans. Image Process. 2014, 24, 120–129. [Google Scholar] [PubMed]
- Zheng, Y.; Zhang, Y.; Wang, Z.; Zhang, J.; Fan, S. Edge Detection Algorithm Based on the Eight Directions Sobel Operator. Comput. Sci. 2013, 40, 354–356. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Pair | Figure 7a | Figure 7b | Figure 7c | Figure 7d | ||||
|---|---|---|---|---|---|---|---|---|
| Rotation | Horizontal | Vertical | Horizontal | Vertical | Horizontal | Vertical | Horizontal | Vertical |
| z = m × n | 956 × 522 | 635 × 362 | 745 × 560 | 1473 × 642 | ||||
| Location | Paris | Square | Hongshan | Jiashan | ||||
| Duplaquet3-DP | 5088 ms | 4911 ms | 1625 ms | 1538 ms | 3373 ms | 3244 ms | 14,501 ms | 14,503 ms |
| Duplaquet4-DP | 5075 ms | 4862 ms | 1580 ms | 1516 ms | 3321 ms | 3238 ms | 14,547 ms | 14,229 ms |
| Our-Flow-DP | 90 ms | 55 ms | 43 ms | 24 ms | 76 ms | 44 ms | 201 ms | 98 ms |
| Multiple | 56 | 89 | 38 | 64 | 44 | 74 | 72 | 148 |
| 56 | 88 | 37 | 63 | 43 | 73 | 72 | 145 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Guo, B.; Li, M.; Liao, X.; Li, W. Improved Seam-Line Searching Algorithm for UAV Image Mosaic with Optical Flow. Sensors 2018, 18, 1214. https://doi.org/10.3390/s18041214
Zhang W, Guo B, Li M, Liao X, Li W. Improved Seam-Line Searching Algorithm for UAV Image Mosaic with Optical Flow. Sensors. 2018; 18(4):1214. https://doi.org/10.3390/s18041214
Chicago/Turabian StyleZhang, Weilong, Bingxuan Guo, Ming Li, Xuan Liao, and Wenzhuo Li. 2018. "Improved Seam-Line Searching Algorithm for UAV Image Mosaic with Optical Flow" Sensors 18, no. 4: 1214. https://doi.org/10.3390/s18041214
APA StyleZhang, W., Guo, B., Li, M., Liao, X., & Li, W. (2018). Improved Seam-Line Searching Algorithm for UAV Image Mosaic with Optical Flow. Sensors, 18(4), 1214. https://doi.org/10.3390/s18041214