Ultra-Long-Distance Hybrid BOTDA/Ф-OTDR

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
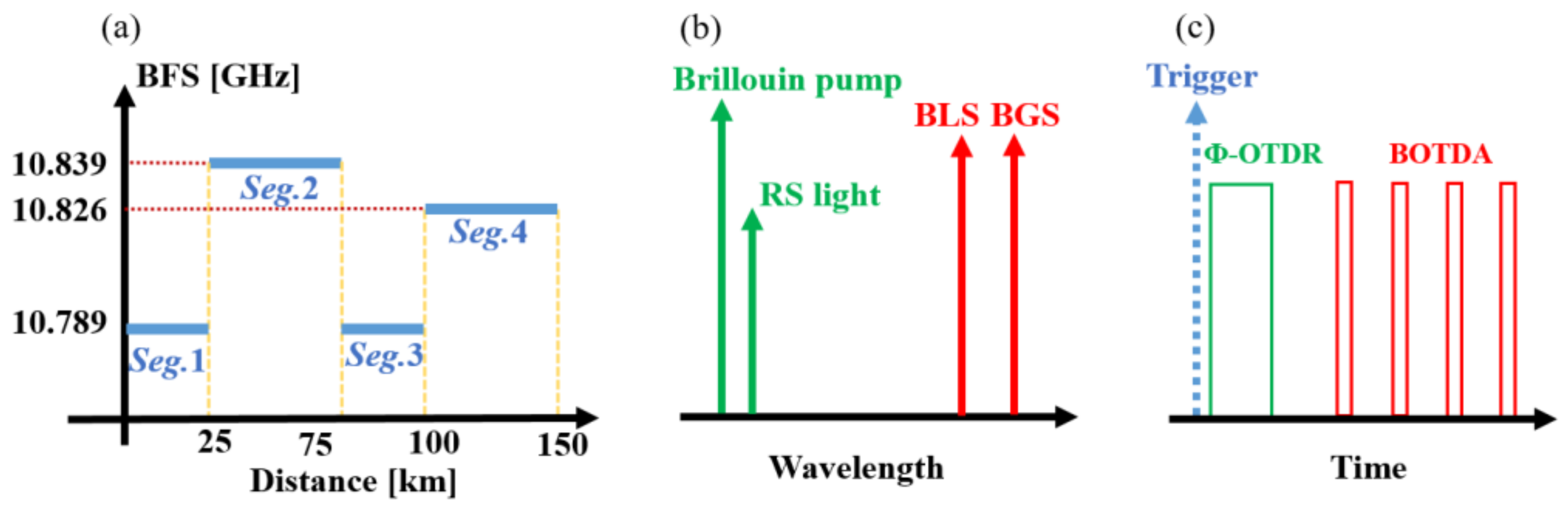
2. Operation Principles
3. Experimental Setup
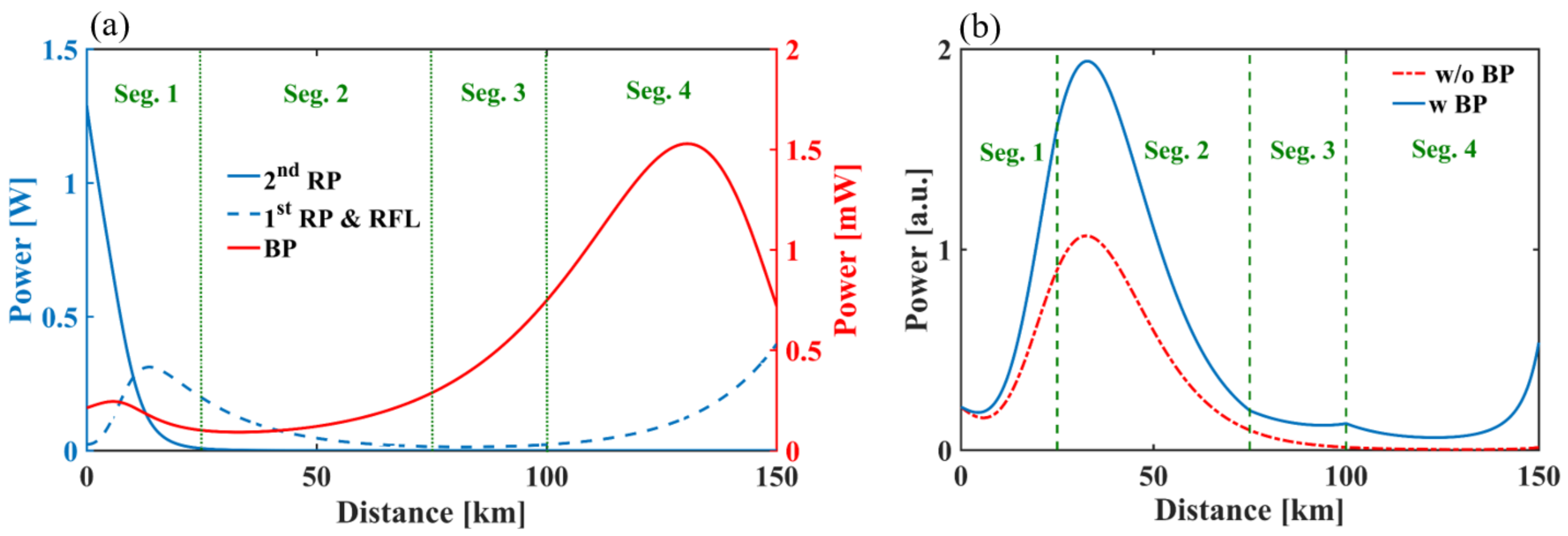
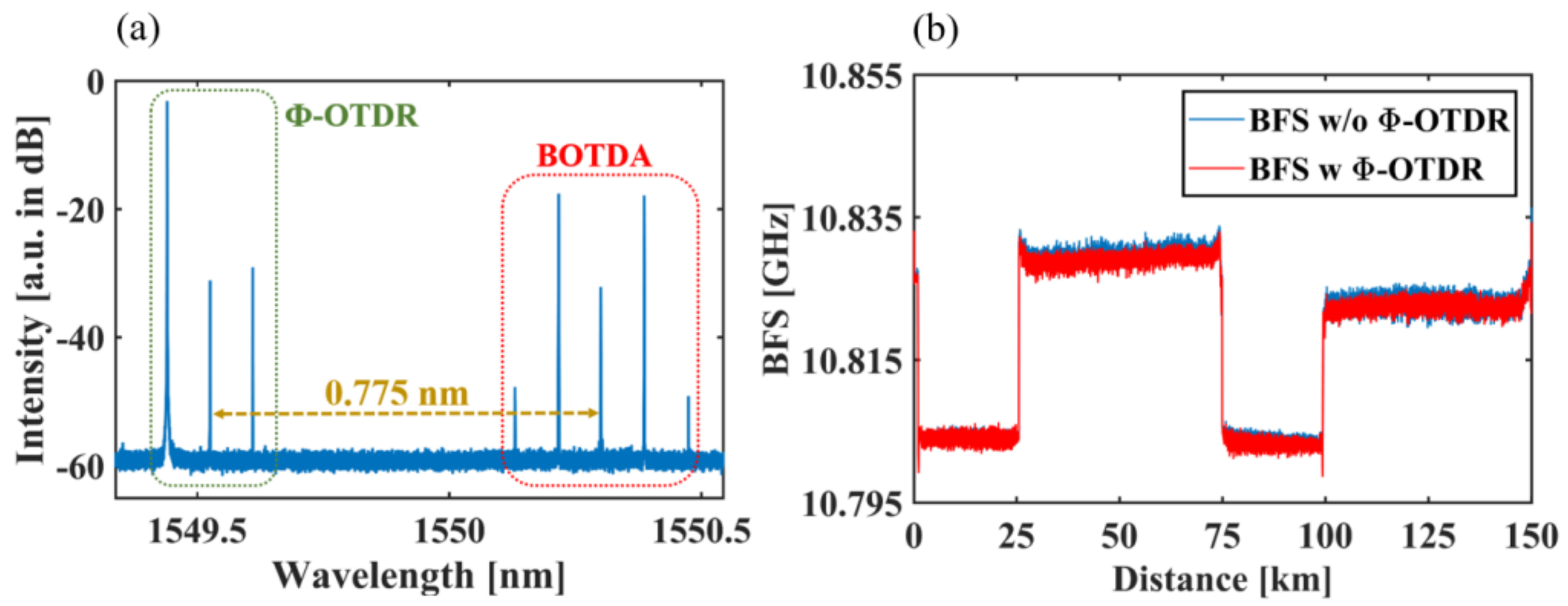
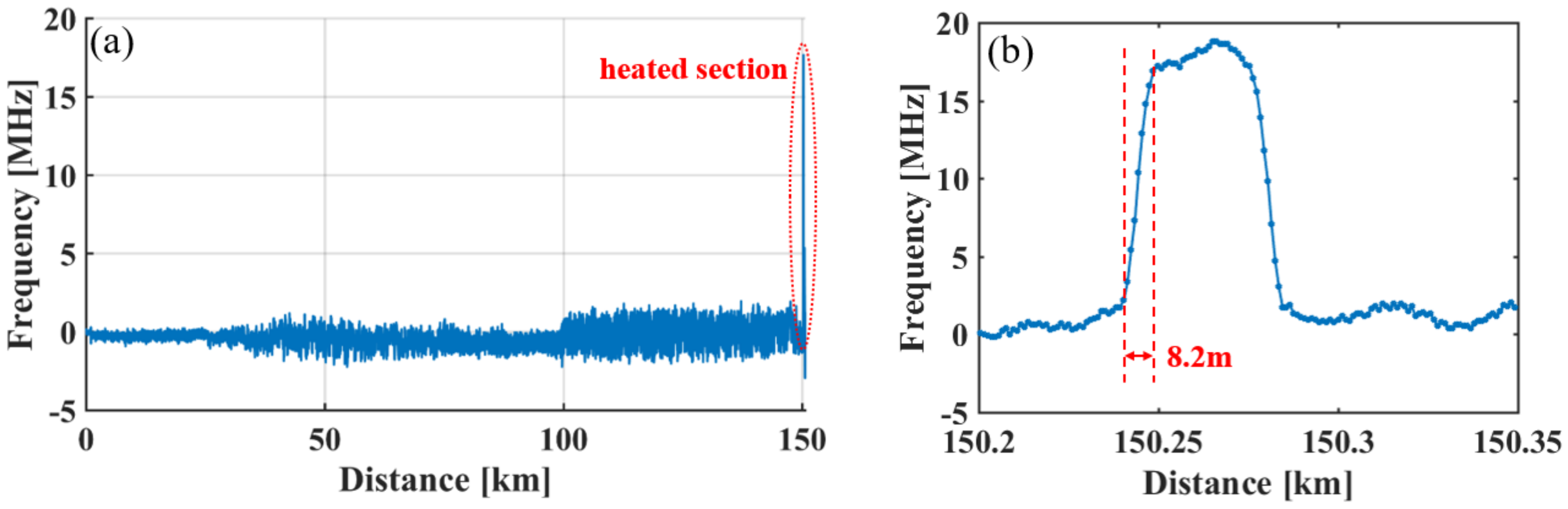
4. Results and Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Masoudi, A.; Newson, T.P. Contributed Review: Distributed optical fibre dynamic strain sensing. Rev. Sci. Instrum. 2016, 87, 011501. [Google Scholar] [CrossRef] [PubMed]
- Angulo-Vinuesa, X.; Dominguez-Lopez, A.; Lopez-Gil, A.; Ania-Castañón, J.D.; Martin-Lopez, S.; Gonzalez-Herraez, M. Limits of BOTDA range extension techniques. IEEE Sens. 2015, 16, 3387–3395. [Google Scholar] [CrossRef]
- Palmieri, L.; Schenato, L. Distributed optical fiber sensing based on Rayleigh scattering. Open Opt. J. 2013, 7, 104–127. [Google Scholar] [CrossRef]
- Jia, X.H.; Rao, Y.J.; Wang, Z.N.; Zhang, W.L.; Ran, Z.L.; Deng, K.; Yang, Z.X. Theoretical investigations on the non-local effect in a long-distance Brillouin optical time-domain analyzer based on bi-directional Raman amplification. J. Opt. 2012, 14, 045202. [Google Scholar] [CrossRef]
- Jia, X.H.; Rao, Y.J.; Peng, F.; Wang, Z.N.; Zhang, W.L.; Wu, H.; Jiang, Y. Random-lasing-based distributed fiber-optic amplification. Opt. Express 2013, 21, 6572–6577. [Google Scholar] [CrossRef] [PubMed]
- Jia, X.H.; Rao, Y.J.; Yuan, C.X.; Li, J.; Yan, X.D.; Wang, Z.N.; Zhang, W.L.; Wu, H.; Zhu, Y.Y.; Peng, F. Hybrid distributed Raman amplification combining random fiber laser based 2nd-order and low-noise LD based 1st-order pumping. Opt. Express 2013, 21, 24611–24619. [Google Scholar] [CrossRef] [PubMed]
- Soto, M.A.; Bolognini, G.; Pasquale, F.D.; Thévenaz, L. Simplex-coded BOTDA fiber sensor with 1 m spatial resolution over a 50 km range. Opt. Lett. 2010, 35, 259–261. [Google Scholar] [CrossRef] [PubMed]
- Lee, D.; Yoon, H.; Kim, P.; Park, J.; Park, N. Optimization of SNR improvement in the non-coherent OTDR based on simplex codes. J. Lightwave Technol. 2006, 24, 322. [Google Scholar]
- Qian, X.; Jia, X.; Wang, Z.; Zhang, B.; Xue, N.; Sun, W.; Wu, H. Noise level estimation of BOTDA for optimal non-local means denoising. Appl. Opt. 2017, 56, 4727–4734. [Google Scholar] [CrossRef] [PubMed]
- Soto, M.A.; Ramírez, J.A.; Thévenaz, L. Intensifying the response of distributed optical fibre sensors using 2D and 3D image restoration. Nat. Commun. 2016, 7, 10870. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; Soto, M.A.; Thévenaz, L. Increasing robustness of bipolar pulse coding in Brillouin distributed fiber sensors. Opt. Express 2016, 24, 586–597. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Wang, Z.; Li, J.; Zeng, J.J.; Li, Y.; Jia, X. Ultra-long dual-sideband BOTDA with balanced detection. Opt. Laser Technol. 2015, 68, 206–210. [Google Scholar] [CrossRef]
- Soto, M.A.; Angulo-Vinuesa, X.; Martin-Lopez, S.; Chin, S.H.; Ania-Castañon, J.D.; Corredera, P.; Rochat, E.; Gonzalez-Herraez, M.; Thévenaz, L. Extending the real remoteness of long-range Brillouin optical time-domain fiber analyzers. J. Lightwave Technol. 2014, 32, 152–162. [Google Scholar] [CrossRef]
- Wang, Z.N.; Zeng, J.J.; Li, J.; Fan, M.Q.; Wu, H.; Peng, F.; Zhang, L.; Zhou, Y.; Rao, Y.J. Ultra-long phase-sensitive OTDR with hybrid distributed amplification. Opt. Lett. 2014, 39, 5866–5869. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.N.; Li, J.; Fan, M.Q.; Zhang, L.; Peng, F.; Wu, H.; Zeng, J.J.; Zhou, Y.; Rao, Y.J. Phase-sensitive optical time-domain reflectometry with Brillouin amplification. Opt. Lett. 2014, 39, 4313–4316. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.; Zhu, T.; Chen, L.; Bao, X. Distributed vibration sensor based on coherent detection of phase-OTDR. J. Lightwave Technol. 2010, 28, 3243–3249. [Google Scholar]
- Wang, Z.; Zhang, L.; Wang, S.; Xue, N.; Peng, F.; Fan, M.; Sun, W.; Qian, X.; Rao, J. Coherent Φ-OTDR based on I/Q demodulation and homodyne detection. Opt. Express 2016, 24, 853–858. [Google Scholar] [CrossRef] [PubMed]
- Martins, H.F.; Martin-Lopez, S.; Corredera, P.; Ania-Castañon, J.D.; Frazão, O.; Gonzalez-Herraez, M. Distributed vibration sensing over 125 km with enhanced SNR using phi-OTDR over a URFL cavity. J. Lightwave Technol. 2015, 33, 2628–2632. [Google Scholar] [CrossRef]
- Peng, F.; Cao, X. A hybrid Φ/B-OTDR for simultaneous vibration and strain measurement. Photon. Sens. 2016, 6, 121–126. [Google Scholar] [CrossRef]
- Zhang, X.; Hu, J.; Zhang, Y. A Hybrid Single-End-Access BOTDA and COTDR Sensing System Using Heterodyne Detection. J. Lightwave Technol. 2013, 31, 1954–1959. [Google Scholar] [CrossRef]
- Dong, Y.; Chen, L.; Bao, X. Extending the sensing range of Brillouin optical time-domain analysis combining frequency-division multiplexing and in-line EDFAs. J. Lightwave Technol. 2012, 30, 1161–1167. [Google Scholar] [CrossRef]
- Motil, A.; Bergman, A.; Tur, M. State of the art of Brillouin fiber-optic distributed sensing. Opt. Laser Technol. 2016, 78, 81–103. [Google Scholar] [CrossRef]
- Bernini, R.; Minardo, A.; Zeni, L. Long-range distributed Brillouin fiber sensors by use of an unbalanced double sideband probe. Opt. Express 2011, 19, 23845–23856. [Google Scholar] [CrossRef] [PubMed]
- Domínguez-López, A.; López-Gil, A.; Martín-López, S.; González-Herráez, M. Signal-to-noise ratio improvement in BOTDA using balanced detection. IEEE Photon. Technol. Lett. 2014, 26, 338–341. [Google Scholar] [CrossRef]
- Zadok, A.; Zilka, E.; Eyal, A.; Thévenaz, L.; Tur, M. Vector analysis of stimulated Brillouin scattering amplification in standard single-mode fibers. Opt. Express 2008, 16, 21692–21707. [Google Scholar] [CrossRef] [PubMed]
- Dominguez-Lopez, A.; Angulo-Vinuesa, X.; Lopez-Gil, A.; Martin-Lopez, S.; Gonzalez-Herraez, M. Gonzalez-Herraez. Non-local effects in dual-probe-sideband Brillouin optical time domain analysis. Opt. Express 2015, 23, 10341–10352. [Google Scholar] [CrossRef] [PubMed]
- Soto, M.A.; Thévenaz, L. Modeling and evaluating the performance of Brillouin distributed optical fiber sensors. Opt. Express 2013, 21, 31347–31366. [Google Scholar] [CrossRef] [PubMed]









© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, Y.; Wang, Z.; Zhu, R.; Xue, N.; Jiang, J.; Lu, C.; Zhang, B.; Yang, L.; Atubga, D.; Rao, Y. Ultra-Long-Distance Hybrid BOTDA/Ф-OTDR. Sensors 2018, 18, 976. https://doi.org/10.3390/s18040976
Fu Y, Wang Z, Zhu R, Xue N, Jiang J, Lu C, Zhang B, Yang L, Atubga D, Rao Y. Ultra-Long-Distance Hybrid BOTDA/Ф-OTDR. Sensors. 2018; 18(4):976. https://doi.org/10.3390/s18040976
Chicago/Turabian StyleFu, Yun, Zinan Wang, Richeng Zhu, Naitian Xue, Jialin Jiang, Chongyu Lu, Bin Zhang, Le Yang, David Atubga, and Yunjiang Rao. 2018. "Ultra-Long-Distance Hybrid BOTDA/Ф-OTDR" Sensors 18, no. 4: 976. https://doi.org/10.3390/s18040976
APA StyleFu, Y., Wang, Z., Zhu, R., Xue, N., Jiang, J., Lu, C., Zhang, B., Yang, L., Atubga, D., & Rao, Y. (2018). Ultra-Long-Distance Hybrid BOTDA/Ф-OTDR. Sensors, 18(4), 976. https://doi.org/10.3390/s18040976