A Coarse-to-Fine Geometric Scale-Invariant Feature Transform for Large Size High Resolution Satellite Image Registration

Abstract
:1. Introduction
2. Methodology
2.1. Coarse Matching
2.2. Fine Matching
2.2.1. Block Division
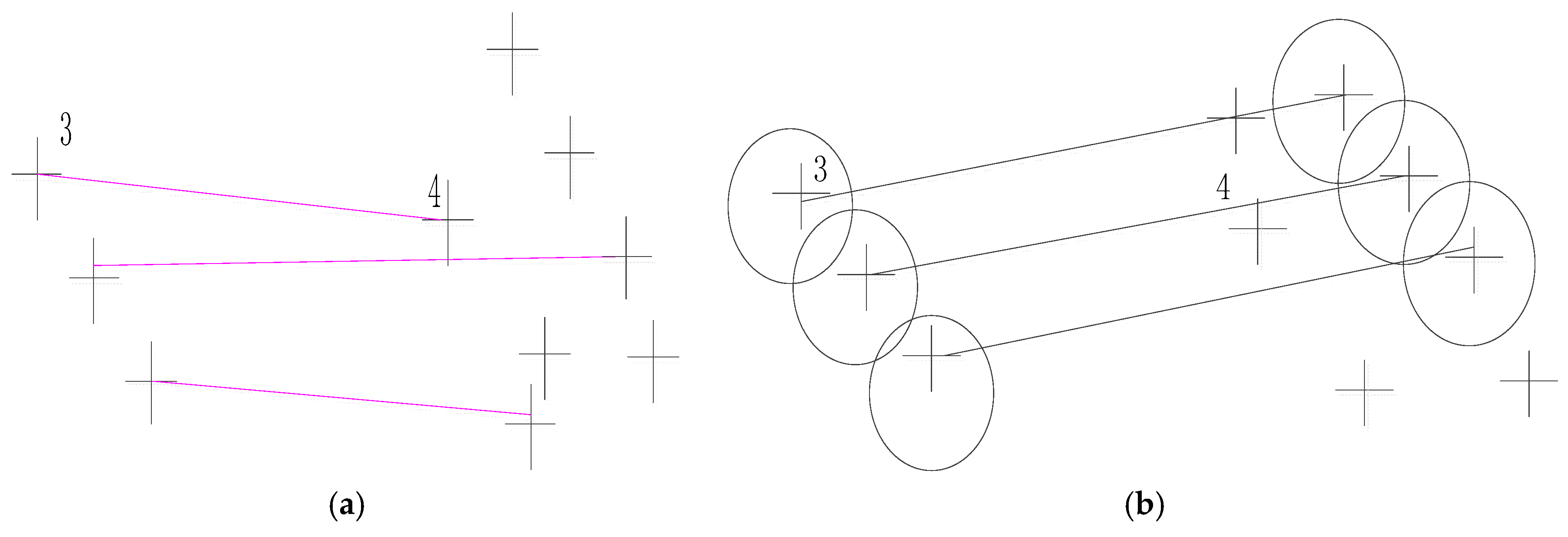
2.2.2. Geometric SIFT
- (1)
- Extract the SIFT keypoints: the sensing image keypoint set and the reference image key point set .
- (2)
- Obtain the matching keypoint set . Map the key point coordinate to the sensing image, and the key point located in the radius R of the circle is put into the matching key point set . If the key point number is less than 20, expand the circle until key point number is more than 20.
- (3)
- Search each the key point in the predicting matching set .
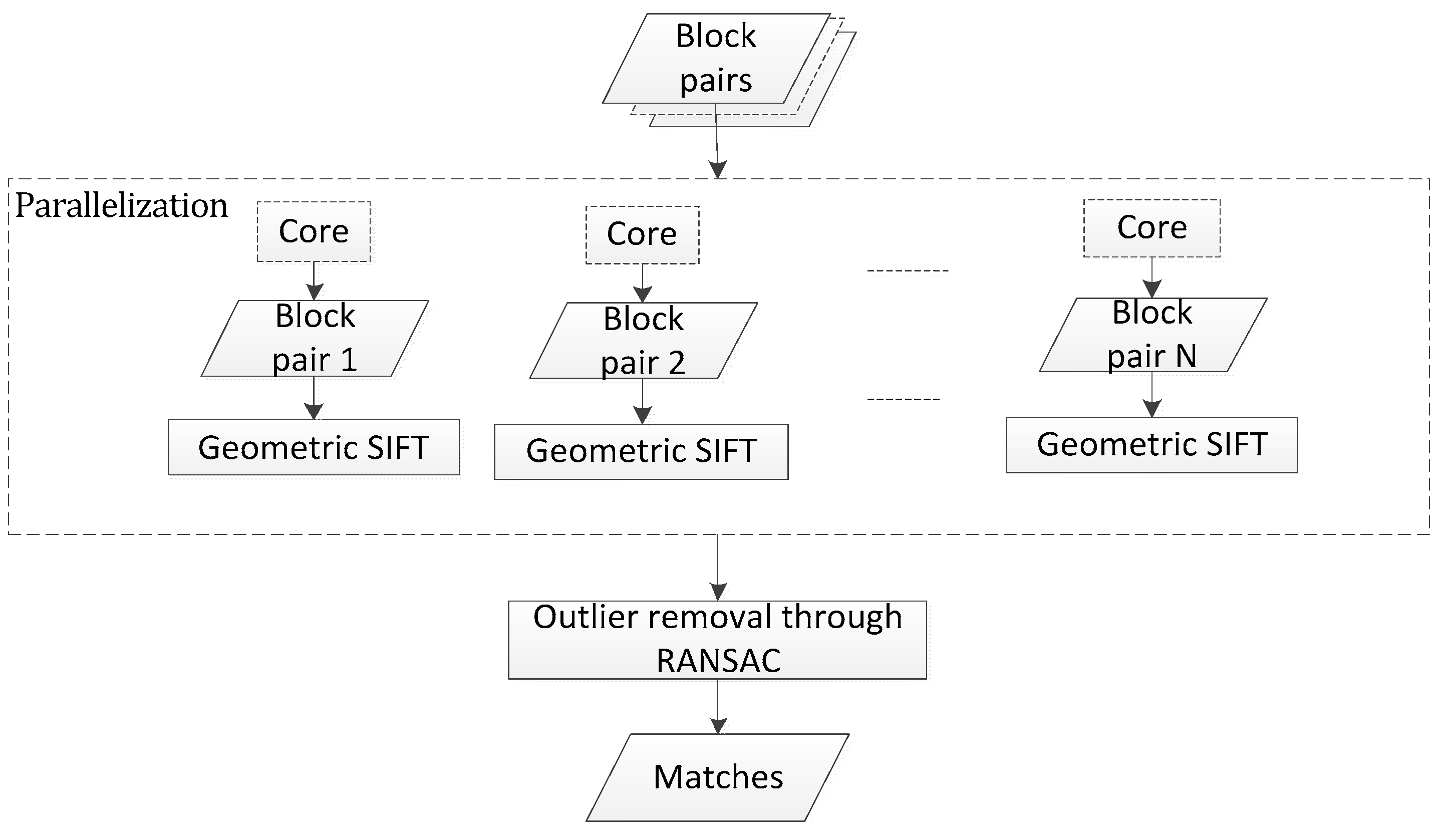
2.2.3. Parallelization
for (int n = 0; n < N; n++)
Geometric_SIFT(block, corresponding_block);
With OpenMP, this code can be parallelized as:
#pragma omp parallel for
for (int n = 0; n < N; n++)
Geometric_SIFT (block, corresponding_block);
2.3. Image Rectification
3. Results
3.1. Test the Performance of The Proposed Geometric SIFT
3.2. Efficiency
3.3. Comparison with Other HR Registration Methods
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zitov, B.; Flusser, J. Image registration methods: A survey. Image Vis. Comput. 2003, 21, 977–1000. [Google Scholar] [CrossRef]
- Huo, C.; Pan, C.; Huo, L.; Zhou, Z. Multilevel SIFT Matching for Large-Size VHR Image Registration. IEEE Geosci. Remote Sens. Lett. 2012, 9, 171–175. [Google Scholar] [CrossRef]
- Xiong, Z.; Zhang, Y. A Novel Interest-Point-Matching Algorithm for High-Resolution Satellite Images. IEEE Trans. Geosci. Remote Sens. 2009, 47, 4189–4200. [Google Scholar] [CrossRef]
- Salvi, J.; Matabosch, C.; Fofi, D.; Forest, J. A review of recent range image registration methods with accuracy evaluation. Image Vis. Comput. 2007, 25, 578–596. [Google Scholar] [CrossRef]
- Kern, J.P.; Pattichis, M.S. Robust multispectral image registration using mutual-information models. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1494–1505. [Google Scholar] [CrossRef]
- Haque, M.N.; Biswas, M.; Pickering, M.R.; Frater, M.R. A Low-Complexity Image Registration Algorithm for Global Motion Estimation. IEEE Trans. Circ. Syst. Video Technol. 2012, 22, 426–433. [Google Scholar] [CrossRef]
- Mikolajczyk, K.; Schmid, C. A performance evaluation of local descriptors. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1615–1630. [Google Scholar] [CrossRef] [PubMed]
- Chen, M.; Shao, Z.; Li, D.; Liu, J. Invariant matching method for different viewpoint angle images. Appl. Opt. 2013, 52, 96–104. [Google Scholar] [CrossRef] [PubMed]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Ke, Y.; Sukthankar, R. PCA-SIFT: A more distinctive representation for local image descriptors. In Proceedings of the 2004 IEEE Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 27 June–2 July 2004; IEEE Computer Soc.: Los Alamitos, CA, USA, 2004; pp. 506–513. [Google Scholar]
- Christophe, E.; Michel, J.; Inglada, J. Remote Sensing Processing: From Multicore to GPU. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 4, 643–652. [Google Scholar] [CrossRef]
- Wu, C. SiftGPU: A GPU Implementation of Scale Invariant Feature Transform (SIFT). 2007. Available online: https://www.researchgate.net/publication/319770614_SiftGPU_A_GPU_Implementation_of_Scale_Invariant_Feature_Transform_SIFT (accessed on 24 April 2018).
- Gong, M.; Zhao, S.; Jiao, L.; Tian, D.; Wang, S. A Novel Coarse-to-Fine Scheme for Automatic Image Registration Based on SIFT and Mutual Information. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4328–4338. [Google Scholar] [CrossRef]
- Sharma, K.; Goyal, A. Very High Resolution Image Registration Based on Two Step Harris-Laplace Detector and SIFT Descriptor. In Proceedings of the 2013 Fourth International Conference On Computing, Communications and Networking Technologies (ICCCNT), Tiruchengode, India, 4–6 July 2013. [Google Scholar]
- Zhang, Y.; Zhou, P.; Ren, Y.; Zou, Z. GPU-accelerated large-size VHR images registration via coarse-to-fine matching. Comput. Geosci. 2014, 66, 54–65. [Google Scholar] [CrossRef]
- Chen, Q.; Wang, S.; Wang, B.; Sun, M. Automatic Registration Method for Fusion of ZY-1-02C Satellite Images. Remote Sens. 2014, 6, 157–179. [Google Scholar] [CrossRef]
- Wang, X.; Li, Y.; Wei, H.; Liu, F. An ASIFT-Based Local Registration Method for Satellite Imagery. Remote Sens. 2015, 7, 7044–7061. [Google Scholar] [CrossRef]
- Lee, I.; Choi, T. Accurate Registration Using Adaptive Block Processing for Multispectral Images. IEEE Trans. Circ. Syst. Video Technol. 2013, 23, 1491–1501. [Google Scholar] [CrossRef]
- Long, T.; Jiao, W.; He, G.; Zhang, Z. A Fast and Reliable Matching Method for Automated Georeferencing of Remotely-Sensed Imagery. Remote Sens. 2016, 8, 56. [Google Scholar] [CrossRef]
- Han, Y.; Choi, J.; Byun, Y.; Kim, Y. Parameter Optimization for the Extraction of Matching Points Between High-Resolution Multisensor Images in Urban Areas. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5612–5621. [Google Scholar]
- Han, Y.K.; Byun, Y.G.; Choi, J.W.; Han, D.Y.; Kim, Y.I. Automatic Registration of High-Resolution Images Using Local Properties of Features. Photogramm. Eng. Remote Sens. 2015, 78, 211–221. [Google Scholar] [CrossRef]
- Yi, Z.; Zhiguo, C.; Yang, X. Multi-spectral remote image registration based on SIFT. Electron. Lett. 2008, 44, 107–108. [Google Scholar] [CrossRef]
- Slabaugh, G.G.; Boyes, R.; Yang, X. Multicore Image Processing with openmp [Applications Corner]. IEEE Signal Proc. Mag. 2010, 27, 134–138. [Google Scholar] [CrossRef]
- Geospatial Data Abstraction Library (GDAL). Available online: http://www.gdal.org/ (accessed on 24 April 2018).
- Li, Y.; Qiao, W.; Jin, H.; Jing, J.; Fan, C. Reliable and Fast Mapping of Keypoints on Large-Size Remote Sensing Images by Use of Multiresolution and Global Information. IEEE Trans. Geosci. Remote Sens. 2015, 12, 1983–1987. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TMP | CMP | CMR | Runtime(s) | |
|---|---|---|---|---|
| SIFT | 451 | 282 | 62.5% | 6.2 |
| Geometric SIFT | 610 | 510 | 85% | 4.1 |
| CMP | CMR | RMSE (Pixel) | Runtime(s) | |
|---|---|---|---|---|
| Lee’s method | 3431 | 73.1% | 0.51 | 1006 |
| Li’s method | 4621 | 79.2% | 0.42 | 931 |
| Proposed method | 6123 | 85.1% | 0.31 | 72 |
| CMP | CMR | RMSE (Pixel) | Runtime(s) | |
|---|---|---|---|---|
| Lee’s method | 5612 | 75.1% | 1.27 | 1461 |
| Li’s method | 8821 | 82.3% | 0.87 | 1131 |
| Proposed method | 10,123 | 87.2% | 0.69 | 84 |
| CMP | CMR | RMSE (Pixel) | Runtime(s) | |
|---|---|---|---|---|
| Lee’s method | 4209 | 70.4% | 0.96 | 1607 |
| Li’s method | 5322 | 76.5% | 0.74 | 1408 |
| Proposed method | 7533 | 79.4% | 0.52 | 102 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, X.; Du, S.; Li, Y.; Fang, S. A Coarse-to-Fine Geometric Scale-Invariant Feature Transform for Large Size High Resolution Satellite Image Registration. Sensors 2018, 18, 1360. https://doi.org/10.3390/s18051360
Chang X, Du S, Li Y, Fang S. A Coarse-to-Fine Geometric Scale-Invariant Feature Transform for Large Size High Resolution Satellite Image Registration. Sensors. 2018; 18(5):1360. https://doi.org/10.3390/s18051360
Chicago/Turabian StyleChang, Xueli, Siliang Du, Yingying Li, and Shenghui Fang. 2018. "A Coarse-to-Fine Geometric Scale-Invariant Feature Transform for Large Size High Resolution Satellite Image Registration" Sensors 18, no. 5: 1360. https://doi.org/10.3390/s18051360