Design of a Novel MEMS Microgripper with Rotatory Electrostatic Comb-Drive Actuators for Biomedical Applications

 ,
, 
Abstract
:1. Introduction
2. Design and Modeling
2.1. Microgripper Design
2.2. Modeling of the Microgripper Performance
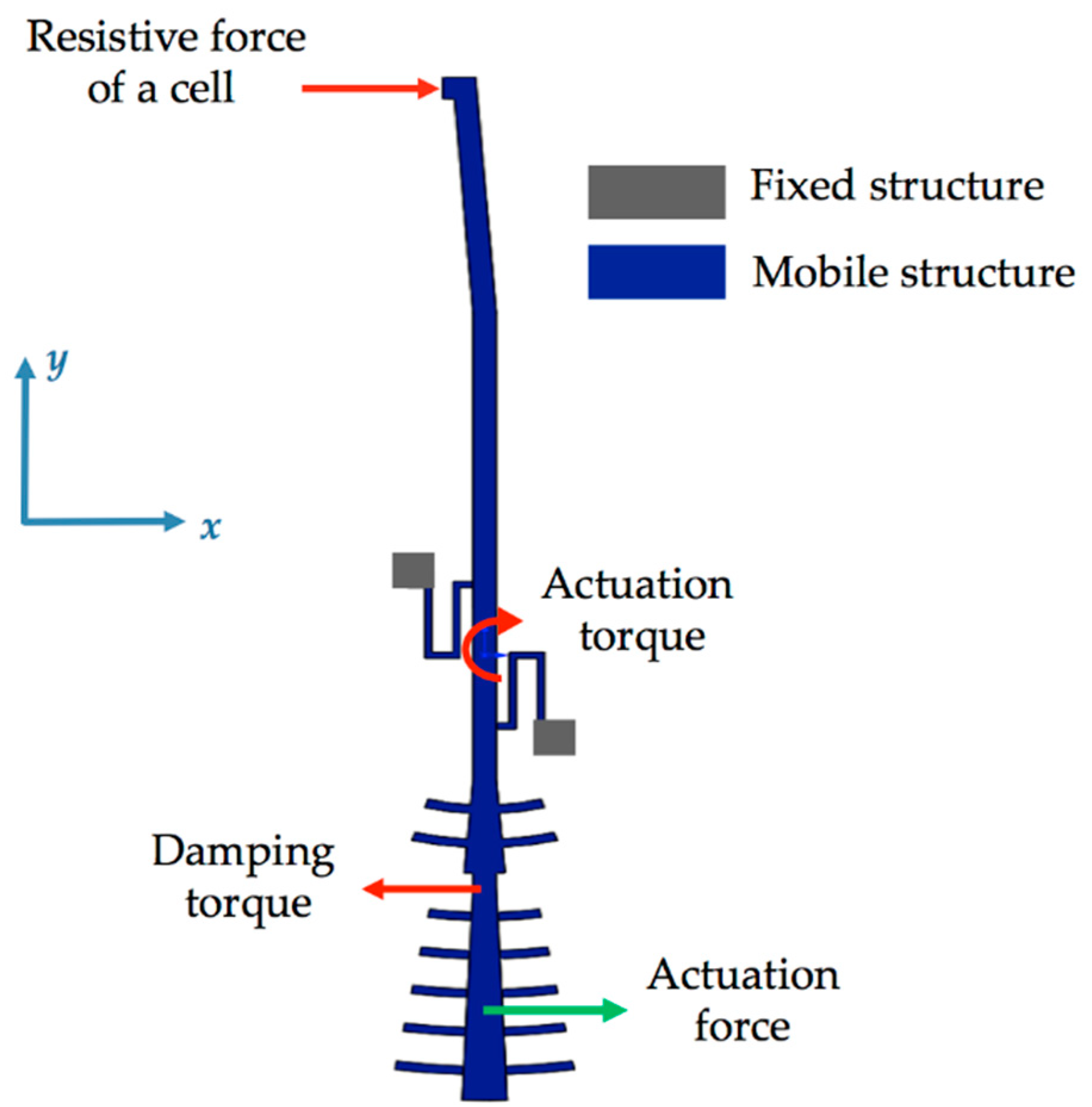
2.2.1. Modeling of the Mobile Arm
2.2.2. Modeling of the Electrostatic Actuation Torque
2.2.3. Modeling of the Damping Torque
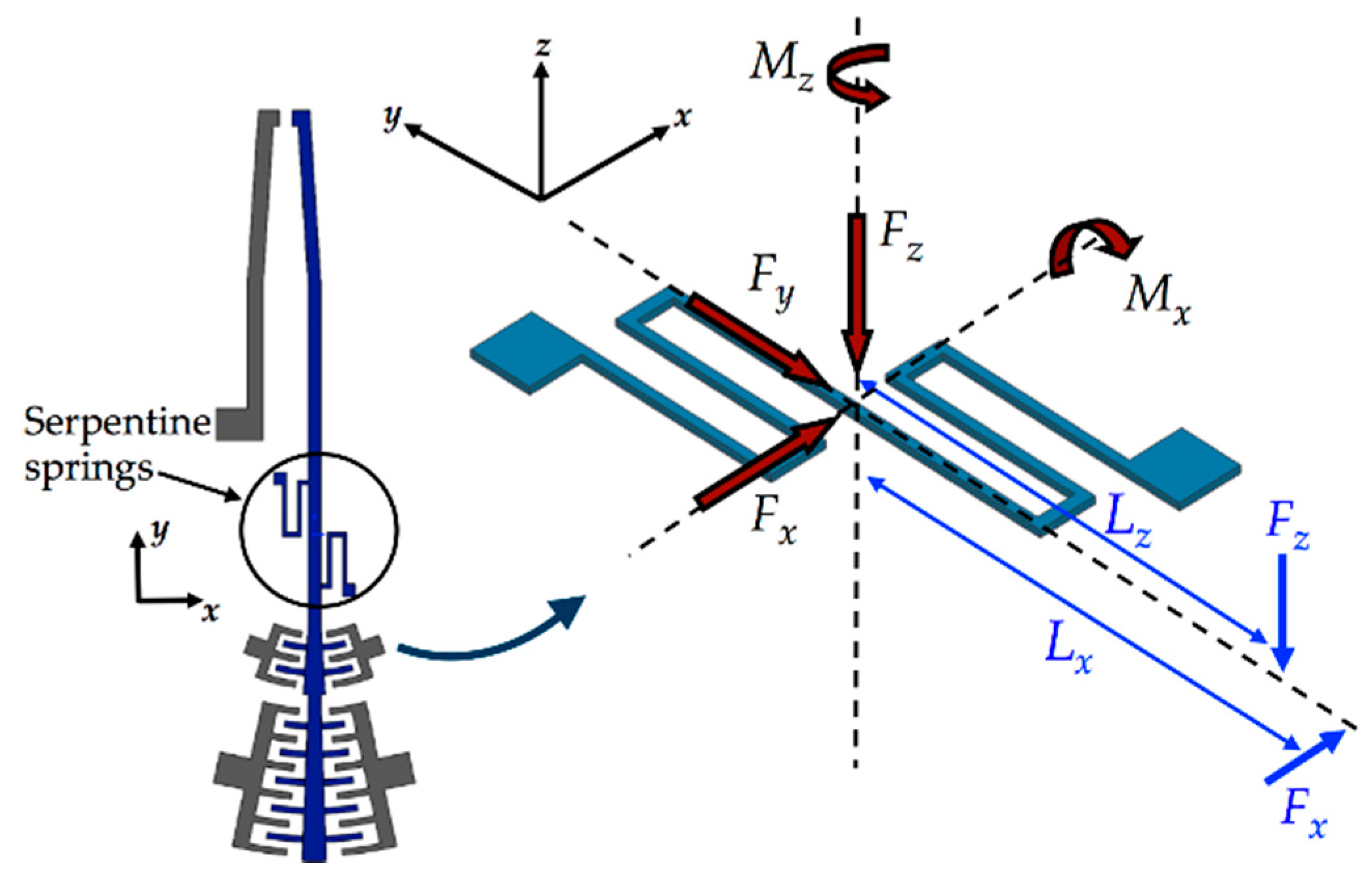
2.2.4. Modeling of the Reaction Torque of the Serpentine Springs
2.2.5. Modeling of the Resistive Torque of the Cell
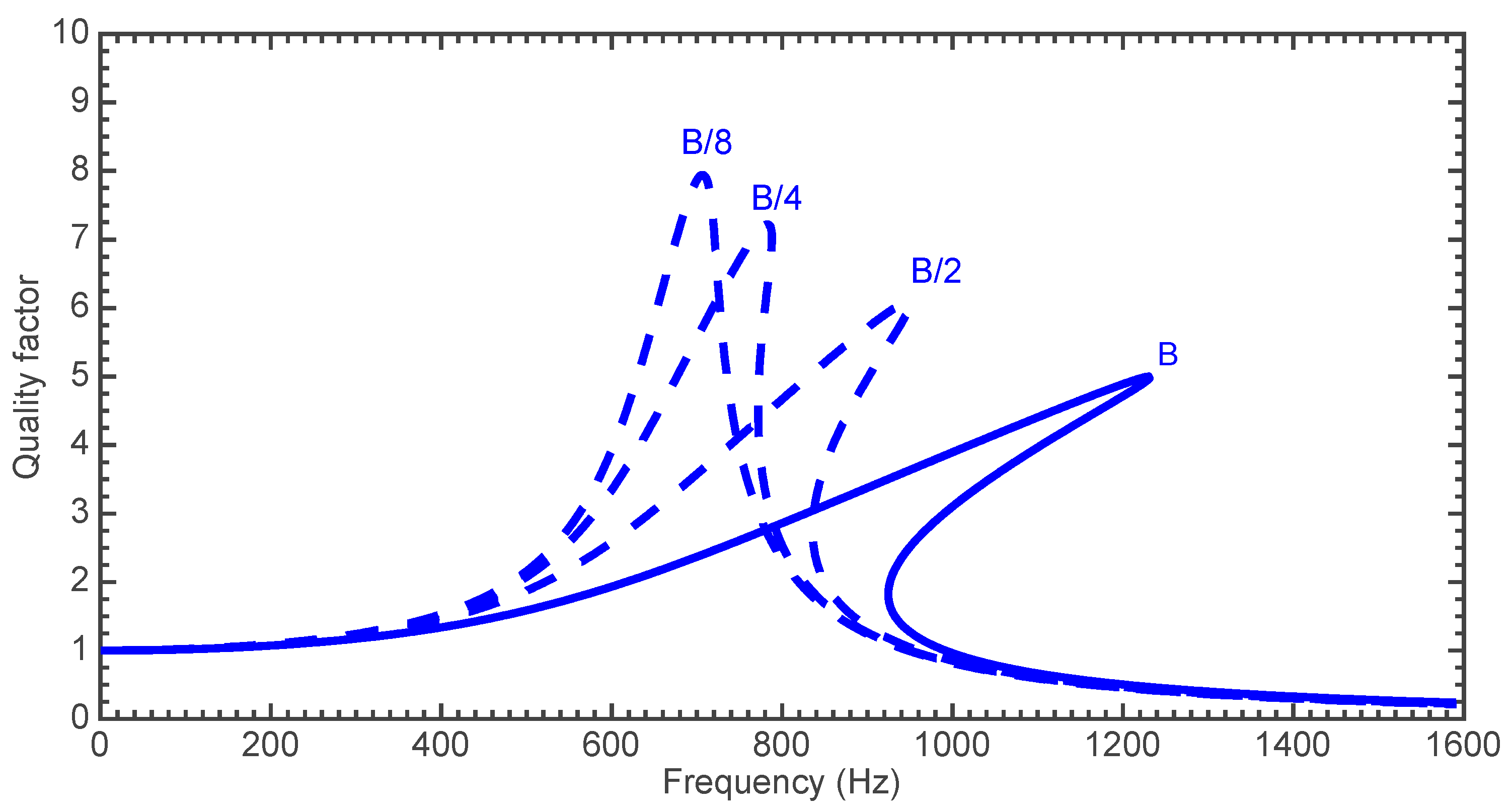
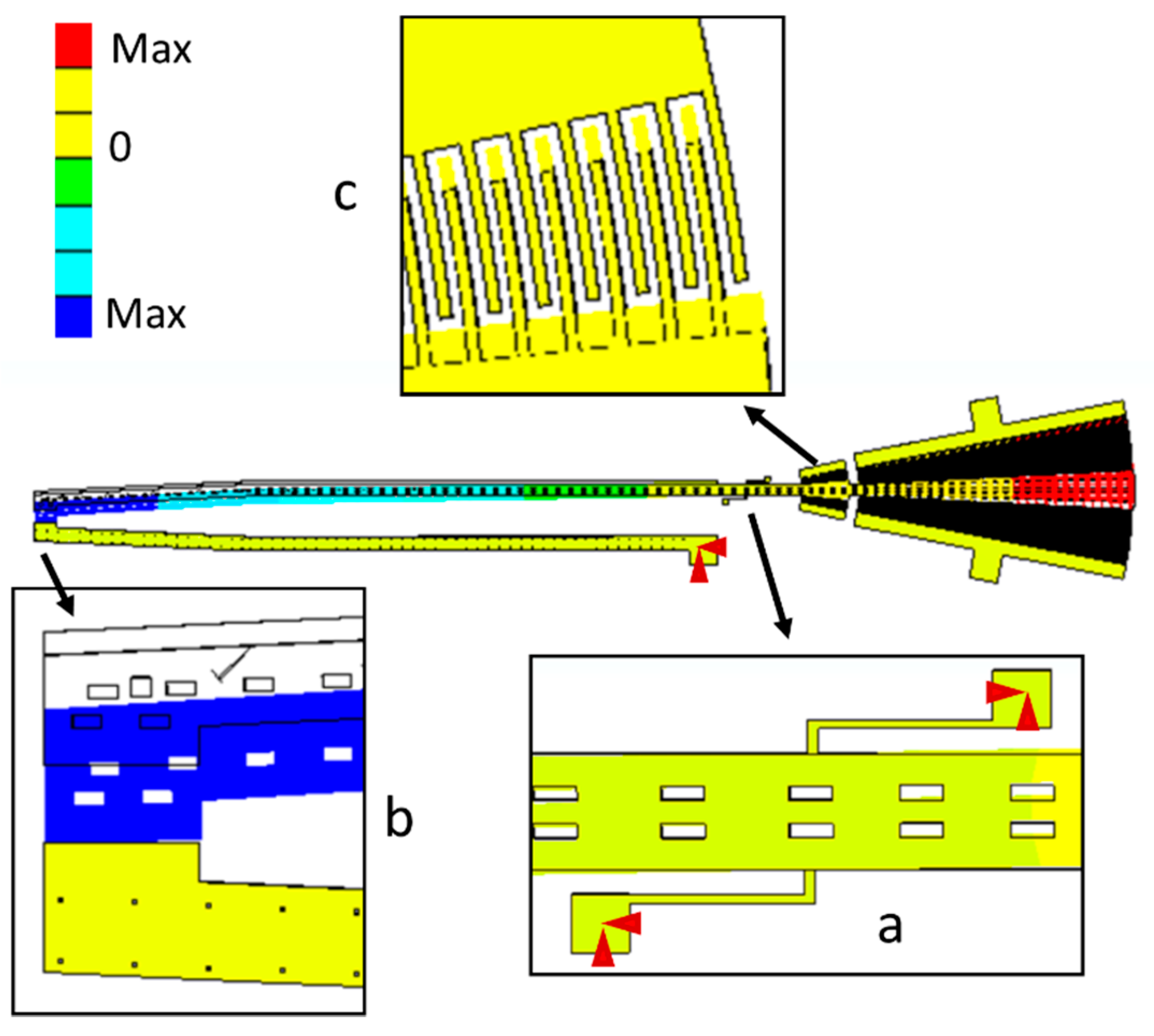
2.3. Modeling of the Resonant Frequency
3. Results and Discussions
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- World Health Organization. Available online: http://www.who.int/mediacentre/factsheets/fs297/en/ (accessed 16 December 2017).
- Siegel, R.L.; Miller, K.D.; Jemal, A. Cancer statistics. CA Cancer J. Clin. 2017, 67, 7–30. [Google Scholar] [CrossRef] [PubMed]
- Lianidou, E.D.; Markou, A. Circulating tumor cells in breast cancer: Detection systems, molecular characterization, and future challenges. Clin. Chem. 2011, 57, 1242–1255. [Google Scholar] [CrossRef] [PubMed]
- Maheswaran, S.; Haber, D.A. Circulating tumor cells: A window into cáncer biology and metástasis. Curr. Opin. Genet. Dev. 2010, 20, 96–99. [Google Scholar] [CrossRef] [PubMed]
- Autebert, J.; Coudert, B.; Bidard, F.-C.; Pierga, J.-Y.; Descroix, S.; Malaquin, L.; Viovy, J.-L. Microfluidic: An innovative tool for efficient cell sorting. Methods 2012, 57, 297–307. [Google Scholar] [CrossRef] [PubMed]
- Rack, B.K.; Schindlbeck, C.; Undergassen, U.; Schneeweiss, A.; Zwingers, T.; Lichtenegger, W.; Beckmann, M.; Sommer, H.L.; Pantel, K.; Janni, W. Use of circulating tumor cells (CTC) in peripheral blood of breast cancer patients before and after adjuvant chemotherapy to predict risk for relapse: The success trial. J. Clin. Oncol. 2010, 28, 1003. [Google Scholar] [CrossRef]
- Pierga, J.-Y.; Bidard, F.-C.; Mathiot, C.; Brain, E.; Delaloge, S.; Giachetti, S.; De Cremoux, P.; Salmon, R.; Vicent-Salomon, A.; Marty, M. Circulating tumor cell detection predicts early metastatic relapse after neoadjuvant chemotherapy in large operable and locally advanced breast cancer in a phase II ramdomized trial. Clin. Cancer Res. 2008, 14, 7004–7010. [Google Scholar] [CrossRef] [PubMed]
- Bidard, F.-C.; Mathiot, C.; Delaloge, S.; Brain, E.; Giachetti, S.; de Cremoux, P.; Marty, M.; Pierga, J.-Y. Single circulating tumor cell detection and overall survival in nonmetastatic breast cancer. Ann. Oncol. 2010, 21, 729–733. [Google Scholar] [CrossRef] [PubMed]
- Cristofanilli, M.; Budd, G.T.; Ellis, M.J.; Stopeck, A.; Matera, J.; Miller, M.C.; Reuben, J.M.; Doyle, G.V.; Allard, W.J.; Terstappen, L.V.M.M.M.; et al. Circulating Tumor Cells, Disease Progression, and Survival in Metastatic Breast Cancer. N. Engl. J. Med. 2004, 351, 781–791. [Google Scholar] [CrossRef] [PubMed]
- Cohen, S.J.; Punt, C.J.A.; Iannotti, N.; Saidman, B.H.; Sabbath, K.D.; Gabrail, N.Y.; Picus, J.; Morse, M.; Mitchell, E.; Miller, M.C.; et al. Relationship of circulating tumor cells to tumor response, progression-free survival, and overall survival in patients with metastatic colorectal cáncer. J. Clin. Oncol. 2008, 26, 3213–3221. [Google Scholar] [CrossRef] [PubMed]
- Scher, H.I.; Jia, X.; de Bono, J.S.; Fleisher, M.; Pienta, K.J.; Raghavan, D.; Heller, G. Circulating tumour cells as prognostic markers in progressive, castration-resistant prostate cancer: A reanalysis of IMMC38 trial data. Lancet Oncol. 2009, 10, 233–239. [Google Scholar] [CrossRef]
- Li, P.; Stratton, Z.S.; Dao, M.; Ritz, J.; Huang, T.J. Probing circulating tumor cells in microfluidics. Lab Chip 2013, 13, 602–609. [Google Scholar] [CrossRef] [PubMed]
- Dong, Y.; Skelley, A.M.; Merdek, K.D.; Sprott, K.M.; Jiang, C.; Pierceall, W.E.; Lin, J.; Stocum, M.; Carney, W.P.; Smirnov, D.A. Microfluidics and circulating tumor cells. J. Mol. Diagn. 2013, 15, 149–157. [Google Scholar] [CrossRef] [PubMed]
- Li, P.; Mao, Z.; Peng, Z.; Zhou, L.; Chen, Y.; Huang, P.-H.; Truica, C.I.; Drabick, J.J.; El-Deiry, W.S.; Dao, M.; et al. Acoustic separation of circulating tumor cells. Proc. Natl. Acad. Sci. USA 2015, 112, 4970–4975. [Google Scholar] [CrossRef] [PubMed]
- Ferreira, M.M.; Ramani, V.C.; Jeffrey, S.S. Circulating tumor cell tecnologies. Mol. Oncol. 2016, 10, 374–394. [Google Scholar] [CrossRef] [PubMed]
- Antfolk, M.; Magnusson, C.; Augustsson, P.; Lilja, H.; Laurell, T. Acoustofluidic, label-free separation and simultaneous concentration of rare tumor cells from White bllod cells. Anal. Chem. 2015, 87, 9322–9328. [Google Scholar] [CrossRef] [PubMed]
- Wang, K.; Zhou, W.; Lin, Z.; Cai, F.; Li, F.; Wu, J.; Meng, L.; Niu, L.; Zheng, H. Sorting of tumor cells in a microfluidic device by multi-stage Surface acoustic waves. Sens. Actuators B Chem. 2018, 258, 1174–1183. [Google Scholar] [CrossRef]
- Kojić, N.; Milošević, M.; Petrović, D.; Isailović, V.; Sarioglu, A.F.; Haber, D.A.; Kojić, M.; Tone, M. A computational study of circulating large tumor cells traversing microvessels. Comput. Biol. Med. 2015, 63, 187–195. [Google Scholar] [CrossRef] [PubMed]
- Meng, S.; Tripathy, D.; Frenkel, E.P.; Shete, S.; Naftalis, E.Z.; Huth, J.F.; Beitsch, P.D.; Leitch, M.; Hoover, S.; Euhus, D.; et al. Circulating tumor cells in patients with breast cancer dormancy. Clin. Cancer Res. 2004, 10, 8152–8162. [Google Scholar] [CrossRef] [PubMed]
- Moreno, J.G.; O’Hara, S.M.; Gross, S.; Doyle, G.; Fritsche, H.; Gomella, L.G.; Terstappen, L.W.M.M. Changes in circulating carcinoma cells in patients with metastatic prostate cancer correlate with disease status. Urology 2001, 58, 386–392. [Google Scholar] [CrossRef]
- Zheng, S.; Lin, H.; Liu, J.Q.; Balic, M.; Datar, R.; Cote, R.J.; Tai, Y.C. Membrane microfilter device for selective capture, electrolysis and genomic analysis of human circulating tumor cells. J. Chromatogr. A 2007, 1162, 154–161. [Google Scholar] [CrossRef] [PubMed]
- Lentner, C.; Lentner, C.; Wink, A. Geigy Scientific Tables; CIBA-Geigy: Basel, Switzerland, 1981. [Google Scholar]
- Shapiro, H.M.; Schildkraut, E.R.; Curbelo, R.; Laird, C.W.; Turner, R.B.; Hirschfeld, T. Combined blood cell counting and classification with fluorochrome stains and flow instrumentation. J. Histochem. Cytochem. 1976, 24, 396–411. [Google Scholar] [CrossRef] [PubMed]
- Xu, W.; Mezencev, R.; Kim, B.; Wang, L.; McDonald, J.; Sulchek, T. Cell stiffness is a biomarker of the metastatic potential of ovarian cancer cells. PLoS ONE 2012, 7, e46609. [Google Scholar] [CrossRef] [PubMed]
- Kumar, S.; Weaver, V.M. Mechanics, malignancy, and metastasis: The force journey of a tumor cell. Cancer Metastasis Rev. 2009, 28, 113–127. [Google Scholar] [CrossRef] [PubMed]
- Swaminathan, V.; Mythreye, K.; O’Brien, E.T.; Berchuck, A.; Blobe, G.C.; Superfine, R. Mechanical stiffness grades metastatic potential in patient tumor cells and in cancer cell lines. Cancer Res. 2011, 71, 5075–5080. [Google Scholar] [CrossRef] [PubMed]
- Alibert, C.; Goud, B.; Manneville, J.B. Are cancer cells really softer than normal cells? Biol. Cell 2017, 109, 167–189. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.S.; Lee, G.Y.; Ong, C.N.; Lim, C.T. AFM indentation study of breast cancer cells. Biochem. Biophys. Res. Commun. 2008, 374, 609–613. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Zhong, Y.; Ye, T.; Wand, D.; Mao, B. Discrimination between cervical cancer cells and normal cervical cells based on longitudinal elasticity using atomic force microscopy. Nanoscale Res. Lett. 2015, 10, 482. [Google Scholar] [CrossRef] [PubMed]
- Faria, E.C.; Ma, N.; Gazi, E.; Gardner, P.; Brown, M.; Clarke, N.W.; Snook, R.D. Measurement of elastic properties of prostate cancer cells using AFM. Analyst 2008, 133, 1498–1500. [Google Scholar] [CrossRef] [PubMed]
- Prabhune, M.; Belge, G.; Dotzauer, A.; Bullerdiek, J.; Radmacher, M. Comparison of mechanical properties of normal and malignant thyroid cells. Micron 2012, 43, 1267–1272. [Google Scholar] [CrossRef] [PubMed]
- Lekka, M. Discrimination between normal and cancerous cells using AFM. Bionanoscience 2016, 6, 65–80. [Google Scholar] [CrossRef] [PubMed]
- Runge, J.; Reichert, T.E.; Fritsch, A.; Kas, J.; Bertolini, J.; Remmerbach, T.W. Evaluation of single-cell biomechanics as potential marker for oral squamous cell carcinomas: A pilot study. Oral Dis. 2014, 20, e120–e127. [Google Scholar] [CrossRef] [PubMed]
- Guck, J.; Schinkinger, S.; Lincoln, B.; Wottawah, F.; Ebert, S.; Romeyke, M.; Lenz, D.; Erickson, H.M.; Ananthakrishnan, R.; Mitchell, D.; et al. Optical deformability as an inherent cell marker for testing malignant transformation and metastatic competence. Biophys. J. 2005, 88, 3689–3698. [Google Scholar] [CrossRef] [PubMed]
- Ameneh, M. Mechanical Properties of Cancer Cells: A Possible Biomarker for Stemness. Ph.D. Dissertation, Ohio University, Athens, OH, USA, 2015. [Google Scholar]
- Lim, C.T.; Zhou, E.H.; Li, A.; Vedula, S.R.K.; Fu, H.X. Experimental techniques for single cell and single molecule biomechanics. Mater. Sci. Eng. C 2006, 26, 1278–1288. [Google Scholar] [CrossRef]
- Loh, O.; Vaziri, A.; Espinosa, H.D. The potential of MEMS for advancing experiments and modeling in cell mechanics. Exp. Mech. 2009, 49, 105–124. [Google Scholar] [CrossRef]
- Qu, J.; Zhang, W.; Jung, A.; Silva-Da Cruz, S.; Liu, X. A MEMS Microgripper with Two-Axis Actuators and Force Sensors for Microscale Mechanical Characterization of Soft Materials. In Proceedings of the 2015 IEEE International Conference on Automation Science and Engineering (CASE), Gothenburg, Sweden, 24–28 August 2015; pp. 1620–1625. [Google Scholar] [CrossRef]
- Kim, K.; Liu, X.; Zhang, Y.; Sun, Y. Nanonewton force-controlled manipulation of biological cells using a monolithic MEMS microgripper with two-axis force feedback. J. Micromech. Microeng. 2008, 18, 055013. [Google Scholar] [CrossRef]
- Chang, H.; Zhao, H.; Ye, F.; Yuan, G.; Xie, J.; Kraft, M.; Yuan, W. A rotary comb-actuated microgripper with a large displacement range. Microsyst. Technol. 2014, 20, 119–126. [Google Scholar] [CrossRef]
- Yuan, G.; Yuan, W.; Hao, Y.; Li, X.; Chang, H. A microgripper with a post-assembly self-locking mechanism. Sensors 2015, 15, 20140–20151. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.M.; Liu, A.Q.; Lu, C.; Tan, D.Y. A real pivot structure for MEMS tunable lasers. J. Microelectromech. Syst. 2007, 16, 269–278. [Google Scholar] [CrossRef]
- Amin, T.M.F.; Huda, M.Q.; Tulip, J.; Jäger, W. A virtual pivot point MEMS actuator with externally mounted mirror, design, fabrication and characterization. Sens. Transducers 2014, 183, 65–71. [Google Scholar]
- Sandia National Laboratories. Available online: http://www.sandia.gov/mstc/mems/ (accessed on 21 December 2017).
- Bao, M. Analysis and Design Principles of MEMS Devices; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Tu, C.-C.; Fanchiang, K.; Liu, C.H. 1 × N rotary vertical micromirror for optical switching applications. Proc. SPIE MOEMS Miniat. Syst. V 2005, 5719. [Google Scholar] [CrossRef]
- Piriyanont, B.; Fowler, A.G.; Moheimani, S.O.R. Force-controlled MEMS rotary microgripper. J. Microelectromech. Syst. 2015, 24, 1164–1172. [Google Scholar] [CrossRef]
- Budynas, R.G.; Nisbett, J.K. Shigley’s Mechanical Engineering Design, 9th ed.; Mc Graw Hill: New York, NY, USA, 2008. [Google Scholar]
- Younis, M. MEMS Linear and Nonlinear Statics and Dynamics; Springer Science Business Media: New York, NY, USA, 2011. [Google Scholar]
- Lobontiu, N.; Ephrahim, G. Mechanics of Microelectromechanical Systems; Kluwer Academic Publishers: New York, NY, USA, 2005. [Google Scholar]
- Kim, K.; Cheng, J.; Liu, Q.; Wu, X.Y.; Sun, Y. Investigation of mechanical properties of soft hydrogel microcapsules in relation protein delivery using a MEMS force sensor. J. Biomed. Mater. Res. 2010, 92A, 103–113. [Google Scholar] [CrossRef] [PubMed]
- Tatara, Y. Large deformations of a rubber sphere under diametral compression. Part 1: Theoretical analysis of press approach, contact radius and lateral extension. JSME Int. J. Ser. A Mech. Mater. Eng. 1993, 36, 190–196. [Google Scholar] [CrossRef]
- Trickey, W.R.; Baaijens, F.P.; Laursen, T.A.; Alexopoulos, L.G.; Guilak, F. Determination of the Poisson’s ratio of the cell: Recovery properties of chondrocytes after release from complete micropipette aspiration. J. Biomech. 2006, 39, 78–87. [Google Scholar] [CrossRef] [PubMed]
- Nicolae, L. System Dynamics for Engineering Students; Elsevier: New York, NY, USA, 2010. [Google Scholar]
- Weaver, W., Jr.; Timoshenko, S.P.; Young, D.H. Vibration Problems in Engineering, 5th ed.; Wiley: New York, NY, USA, 1990. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| R0 | 400 μm |
| θ0 | 6° |
| g | 2 μm |
| h | 7 μm |
| Wf | 2 μm |
| Stiffness | Analytical Model | FEM Model Using Beam188 Elements | Relative Difference | FEM Model Using Solid187 Elements | Relative Difference |
|---|---|---|---|---|---|
| ktz | 49,557 μN μm rad−1 | 49,019 μN μm rad−1 | −1.1% | 49,901 μN μm rad−1 | 0.7% |
| ktx | 11,982 μN μm rad−1 | 11,737 μN μm rad−1 | −2.0% | 12,280 μN μm rad−1 | 2.5% |
| kFx | 25.74 μN μm−1 | 25.50 μN μm−1 | −0.9% | 26.01 μN μm−1 | 1.1% |
| kFy | 90.76 μN μm−1 | 90.30 μN μm−1 | −0.5% | 89.45 μN μm−1 | −1.4% |
| kFz | 10.14 μN μm−1 | 10.18 μN μm−1 | 0.4% | 10.32 μN μm−1 | 1.8% |
| Vibration Mode | Modal Shape | Resonant Frequency (Hz) |
|---|---|---|
| 1 | Rotational around x-axis | 238 |
| 2 | Rotational around z-axis | 463 |
| 3 | Rotational around x-axis | 2525 |
| 4 | Rotational around y-axis | 3179 |
| 5 | Rotational around x-axis | 7352 |
| Cell | Cell Type | Elastic Modulus (Pa) | Radius (μm) |
|---|---|---|---|
| BHP | Benign prostate cell | 2797 ± 491 | 10 |
| PC-3 | Malignant prostate cell | 1401 ± 162 | 10 |
| LNCaP | Malignant prostate cell | 287 ± 52 | 10 |
| Cell | Parameter of the Regression (αax3 + αb) | |
|---|---|---|
| αa | αb | |
| BHP | 5.69 × 10−8 | 19.39 × 10−3 |
| PC-3 | 2.85 × 10−8 | 9.69 × 10−3 |
| LNCaP | 5.83 × 10−9 | 19.87 × 10−4 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Velosa-Moncada, L.A.; Aguilera-Cortés, L.A.; González-Palacios, M.A.; Raskin, J.-P.; Herrera-May, A.L. Design of a Novel MEMS Microgripper with Rotatory Electrostatic Comb-Drive Actuators for Biomedical Applications. Sensors 2018, 18, 1664. https://doi.org/10.3390/s18051664
Velosa-Moncada LA, Aguilera-Cortés LA, González-Palacios MA, Raskin J-P, Herrera-May AL. Design of a Novel MEMS Microgripper with Rotatory Electrostatic Comb-Drive Actuators for Biomedical Applications. Sensors. 2018; 18(5):1664. https://doi.org/10.3390/s18051664
Chicago/Turabian StyleVelosa-Moncada, Luis A., Luz Antonio Aguilera-Cortés, Max A. González-Palacios, Jean-Pierre Raskin, and Agustin L. Herrera-May. 2018. "Design of a Novel MEMS Microgripper with Rotatory Electrostatic Comb-Drive Actuators for Biomedical Applications" Sensors 18, no. 5: 1664. https://doi.org/10.3390/s18051664