Cost-Effective Technologies to Study the Arctic Ocean Environment †

 ,
, 
 , ,
, ,  ,
,  , ,
, ,
Abstract
:1. Introduction
2. Technology Description
2.1. State of the Art of Marine Probes and Sensors
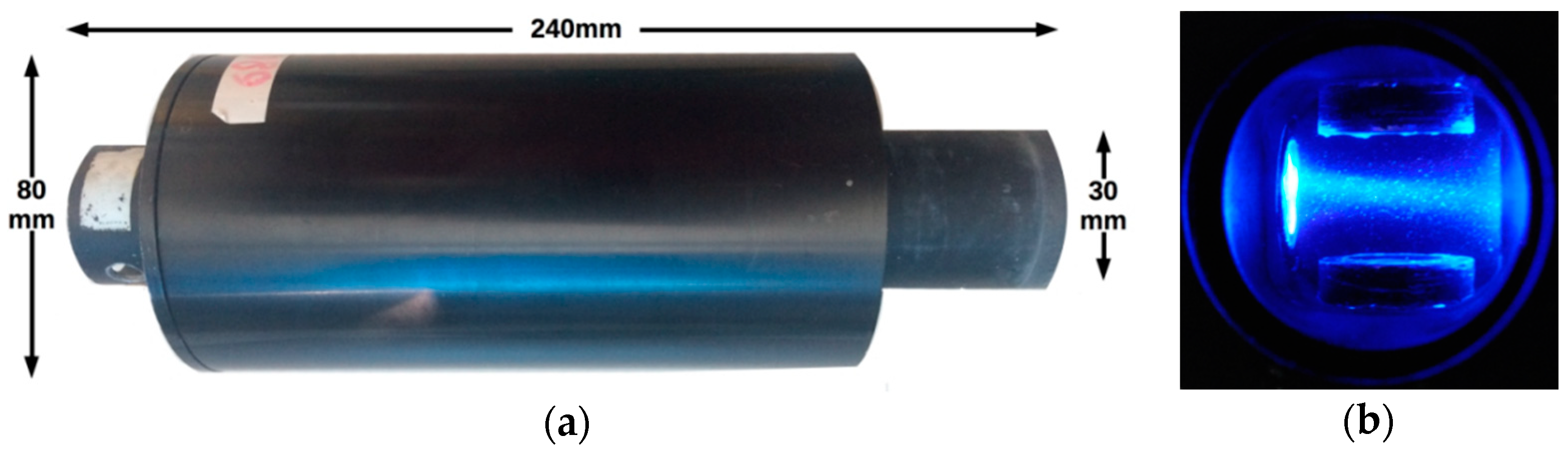
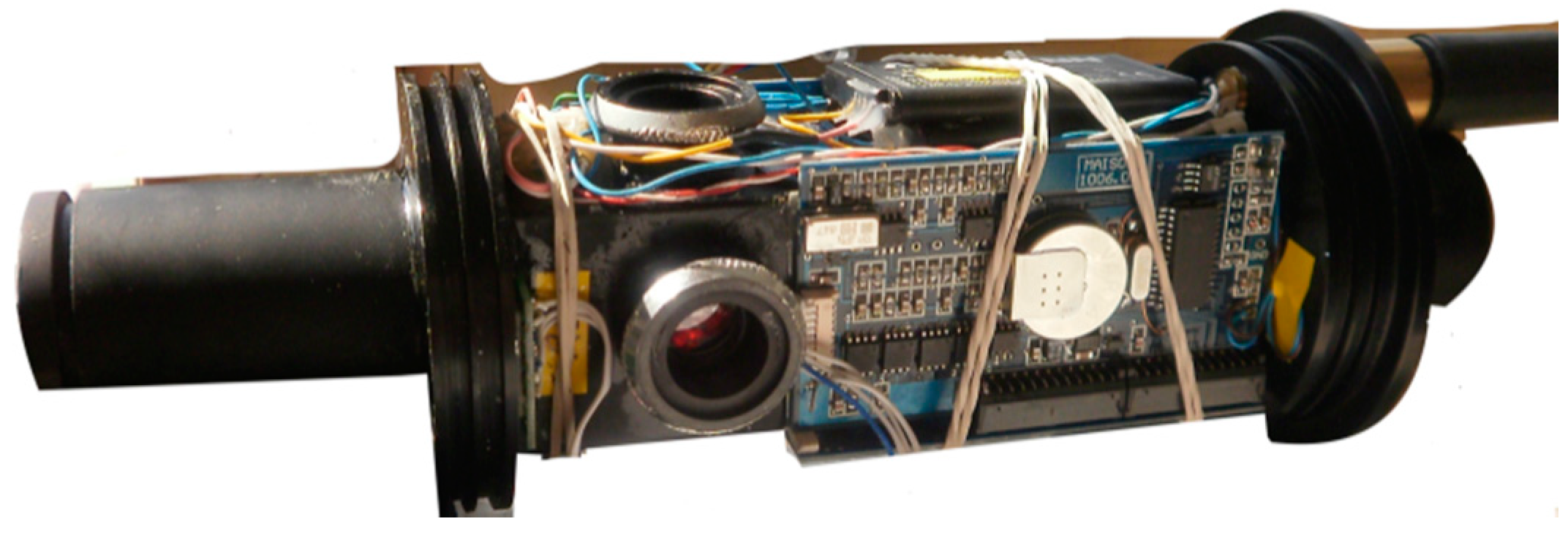
2.2. The ArLoC Probe
2.3. PROTEUS Platform
3. Data Acquisition and Analysis
3.1. Campaign Description
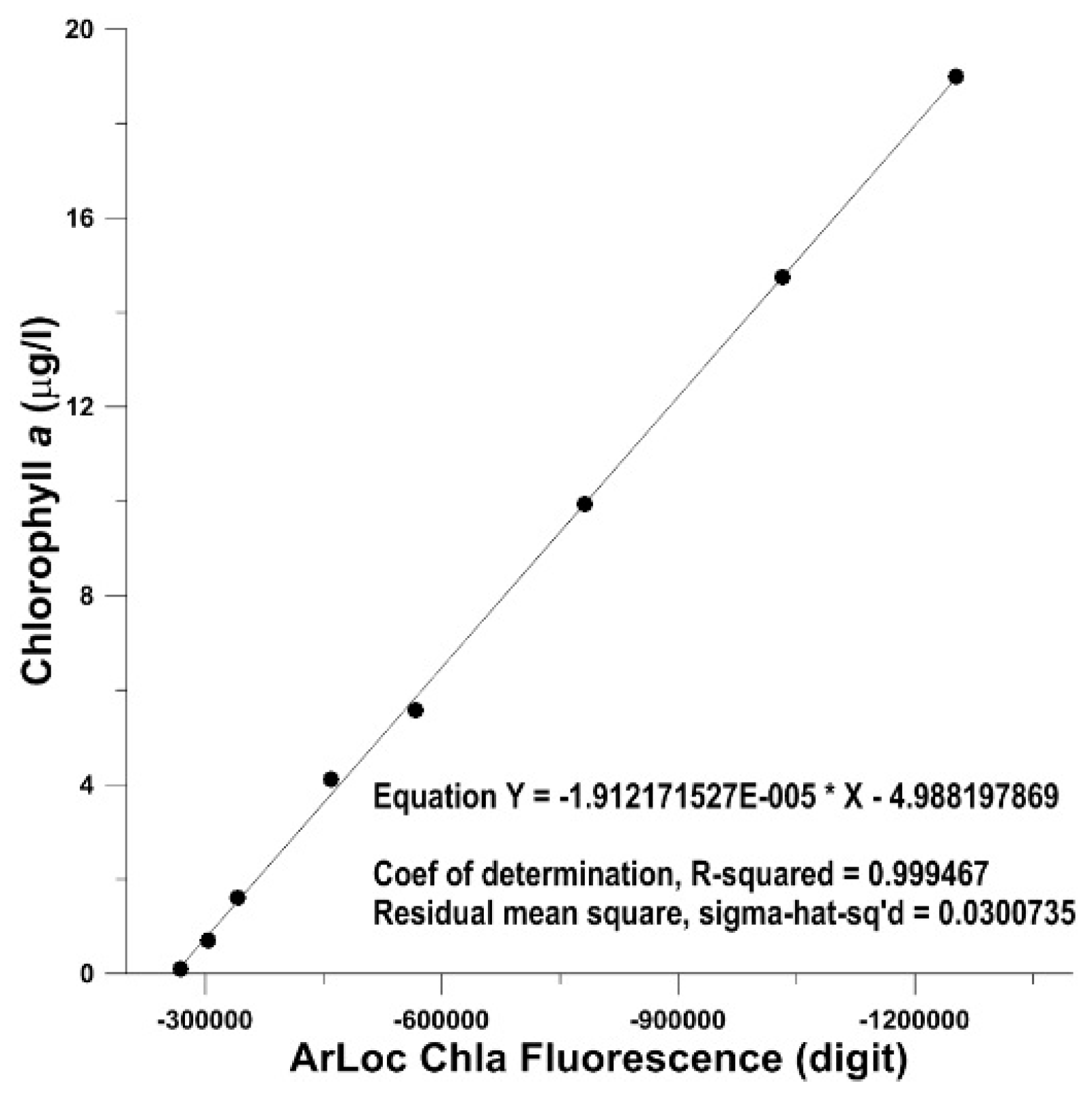
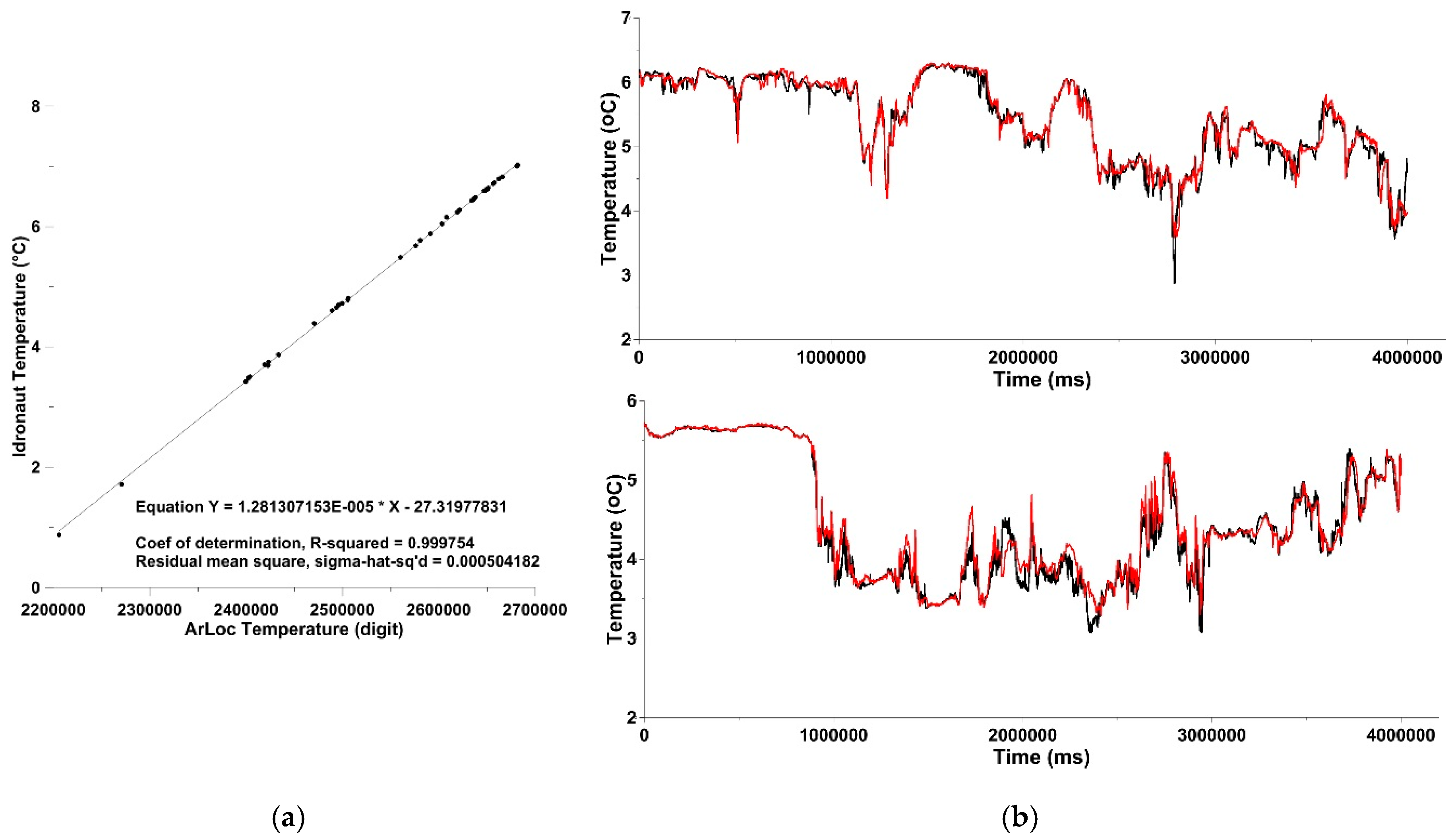
3.2. ArLoc In Situ Testing
3.3. Application of ArLoC as Sea-Truth of Remote Sensing
4. Discussion and Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Hansen, J.; Sato, M.; Ruedy, R.; Lo, K.; Lea, D.W.; Medina-Elizade, M. Global temperature change. Proc. Natl. Acad. Sci. USA 2006, 103, 14288–14293. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wadhams, P. A Farewell to Ice: A Report from the Arctic; Oxford University Press: Oxford, UK, 2017. [Google Scholar]
- Popova, E.E.; Yool, A.; Coward, A.C.; Dupont, F.; Deal, C.; Elliott, S.; Hunke, E.; Jin, M.; Steele, M.; Zhang, J. What controls primary production in the Arctic Ocean? Results from an intercomparison of five general circulation models with biogeochemistry. J. Geophys. Res. 2012, 117, C00D12. [Google Scholar] [CrossRef]
- Doney, S.C. Plankton in a warmer world. Nature 2006, 444, 695–696. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hallegraeff, G.M. Ocean climate change, phytoplankton community responses, and harmful algal blooms: A formidable predictive challenge. J. Phycol. 2010, 46, 220–235. [Google Scholar] [CrossRef]
- Hop, H.; Pearson, T.; Hegseth, E.N.; Kovacs, K.M.; Wiencke, C.; Kwasniewski, S.; Eiane, K.; Mehlum, F.; Gulliksen, B.; Wlodarska-Kowalczuk, M.; et al. The marine ecosystem of Kongsfjorden, Svalbard. Polar Res. 2002, 21, 167–208. [Google Scholar] [CrossRef]
- Calleja, M.L.; Kerhervé, P.; Bourgeois, S.; Kędra, M.; Leynaert, A.; Devred, E.; Morata, N. Effects of increase glacier discharge on phytoplankton bloom dynamics and pelagic geochemistry in a high Arctic fjord. Prog. Oceanogr. 2017, 159, 195–210. [Google Scholar] [CrossRef]
- IOC/UNESCO. Why Monitor the Arctic Ocean? Services to Society from a Sustained Ocean Observing System; IOC/UNESCO: Paris, France, 2010. [Google Scholar]
- Cisek, M.; Colao, F.; Demetrio, E.; Di Cicco, A.; Drotzdowska, V.; Fiorani, L.; Goszczko, I.; Lazic, V.; Okladnikov, I.G.; Palucci, A.; et al. Remote and local monitoring of dissolved and suspended fluorescent organic matter off the Svalbard. J. Optoelectron. Adv. Mater. 2010, 12, 1604–1618. [Google Scholar]
- Stevens, L.A.; Straneo, F.; Das, S.B.; Plueddemann, A.J.; Kukulya, A.L.; Morlighem, M. Linking glacially modified waters to catchment-scale subglacial discharge using autonomous underwater vehicle observations. Cryosphere 2016, 10, 417–432. [Google Scholar] [CrossRef] [Green Version]
- Cui, S.; He, J.; He, P.; Zhang, F.; Lin, L.; Ma, Y. The adaptation of Arctic phytoplankton to low light and salinity in Kongsfjorden (Spitsbergen). Adv. Polar Sci. 2012, 23, 19–24. [Google Scholar] [CrossRef]
- Albaladejo, C.; Sánchez, P.; Iborra, A.; Soto, F.; López, J.A.; Torres, R. Wireless sensor networks for oceanographic monitoring: A systematic review. Sensors 2010, 10, 6948–6968. [Google Scholar] [CrossRef] [PubMed]
- Lockridge, G.; Dzwonkowski, B.; Nelson, R.; Powers, S. Development of a low-cost Arduino-based sonde for coastal applications. Sensors 2016, 16, 528. [Google Scholar] [CrossRef] [PubMed]
- Alippi, C.; Camplani, R.; Galperti, C.; Roveri, M. A robust, adaptive, solar-powered WSN framework for aquatic environmental monitoring. IEEE Sens. J. 2011, 11, 45–55. [Google Scholar] [CrossRef]
- Ho, C.K.; Robinson, A.; Miller, D.R.; Davis, M.J. Overview of sensors and needs for environmental monitoring. Sensors 2005, 5, 4–37. [Google Scholar] [CrossRef]
- Trevathan, J.; Johnstone, R.; Chiffings, T.; Atkinson, I.; Bergmann, N.; Read, W.; Theiss, S.; Myers, T.; Stevens, T. SEMAT—The next generation of inexpensive marine environmental monitoring and measurement systems. Sensors 2012, 12, 9711–9748. [Google Scholar] [CrossRef] [PubMed]
- Piermattei, V.; Madonia, A.; Bonamano, S.; Martellucci, R.; Bruzzone, G.; Ferretti, R.; Odetti, A.; Azzaro, M.; Zappalà, G.; Marcelli, M. Application of a low-cost instrumentation in Arctic extreme conditions. In Proceedings of the 4th International Electronic Conference on Sensors and Applications, 15–30 November 2017. [Google Scholar] [CrossRef]
- Werdell, P.J.; Bailey, S.W. An improved in-situ bio-optical data set for ocean color algorithm development and satellite data product validation. Remote Sens. Environ. 2005, 98, 122–140. [Google Scholar] [CrossRef]
- Marcelli, M.; Pannocchi, A.; Piermattei, V.; Mainardi, U. New technological developments for oceanographic observations. In Oceanography; IntechOpen: Rijeka, Croatia, 2012. [Google Scholar]
- Bruzzone, G.; Odetti, A.; Caccia, M. Remote data collection near marine glacier fronts—Unmanned vehicles for autonomous sensing, sampling in the North Pole. Sea Technol. 2018, 59, 22–26. [Google Scholar]
- The Cave Pearl Project. Available online: https://edwardmallon.wordpress.com/about/about-me/ (accessed on 11 July 2018).
- Jiang, P.; Xia, H.; He, Z.; Wang, Z. Design of a water environment monitoring system based on wireless sensor networks. Sensors 2009, 9, 6411–6434. [Google Scholar] [CrossRef] [PubMed]
- Davis, J. A Novel Aquatic Sensor and Network. Ph.D. Thesis, Rensselaer Polytechnic Institute, New York, NY, USA, 2016. [Google Scholar]
- O’Flynn, B.; Regan, F.; Lawlor, A.; Wallace, J.; Torres, J.; O’Mathuna, C. Experiences and recommendations in deploying a real-time, water quality monitoring system. Meas. Sci. Technol. 2010, 21, 124004. [Google Scholar] [CrossRef] [Green Version]
- Busch, J.A.; Engel, J.; Zielinski, O.; Friedrichs, A.; UNIOL. Review of State of the Art in Affordable Fluorescence Sensors. D2.2 Work Package 2 Crowdsourcing Technologies for the Monitoring of the Colour, Transparency & Fluorescence of the Sea. Available online: www.Citclops.eu (accessed on 11 July 2018).
- Marcelli, M.; Piermattei, V.; Madonia, A.; Mainardi, U. Design and application of new low-cost instruments for marine environmental research. Sensors 2014, 14, 23348–23364. [Google Scholar] [CrossRef] [PubMed]
- International Organization for Standardization (ISO). Water Quality Measurement of Biochemical Parameters Spectrometric Determination of the Chlorophyll a Concentration; ISO: Geneva, Switzerland, 1992. [Google Scholar]
- Jeffrey, S.W.; Humphrey, G.F. New Spectrophotometric equations for determining chlorophylls a, b, c1 and c2 in higher plants, algae, and natural phytoplankton. Biochem. Physiol. Pflanz. 1975, 167, 191–194. [Google Scholar] [CrossRef]
- Odetti, A.; Bruzzone, G.; Caccia, M.; Spirandelli, E.; Bruzzone, G. P2-ROV a portable/polar ROV. In Proceedings of the OCEANS 2017, Aberdeen, UK, 19–22 June 2017. [Google Scholar] [CrossRef]
- Zappala, G.; Bruzzone, G.; Caruso, G.; Azzaro, M. Development of an automatic sampler for extreme polar environments: First in situ application in Svalbard Islands. Rend. Lincei 2016, 27, 251–259. [Google Scholar] [CrossRef]
- Bourgeois, S.; Kerhervé, P.; Calleja, M.L.L.; Many, G.; Morata, N. Glacier inputs influence organic matter composition and prokaryotic distribution in a high Arctic fjord (Kongsfjorden, Svalbard). J. Mar. Syst. 2016, 164, 112–127. [Google Scholar] [CrossRef]
- Hegseth, E.N.; Tverberg, V. Effect of Atlantic water inflow on timing of the phytoplankton spring bloom in a high Arctic fjord (Kongsfjorden, Svalbard). J. Mar. Syst. 2013, 113, 94–105. [Google Scholar] [CrossRef]
- Van De Poll, W.H.; Maat, D.S.; Fischer, P.; Rozema, P.D.; Daly, O.B.; Koppelle, S.; Visser, R.J.W.; Buma, A.G. Atlantic Advection Driven Changes in Glacial Meltwater: Effects on Phytoplankton Chlorophyll-a and Taxonomic Composition in Kongsfjorden, Spitsbergen. Front. Mar. Sci. 2016, 3, 200. [Google Scholar] [CrossRef]
- Schlitzer, R. Ocean Data View. Available online: https://odv.awi.de (accessed on 11 July 2018).
- Earth Explorer. USGS Science for a Changing World. Available online: https://earthexplorer.usgs.gov (accessed on 11 July 2018).
- Vanhellemont, Q.; Ruddick, K. Acolite for Sentinel-2: Aquatic applications of MSI imagery. In Proceedings of the 2016 ESA Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Tzortziou, M.; Subramaniam, A.; Herman, J.R.; Gallegos, C.L.; Neale, P.J.; Harding, L.W., Jr. Remote sensing reflectance and inherent optical properties in the mid Chesapeake Bay. Estuar. Coast. Shelf Sci. 2007, 72, 16–32. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor-Probe | Measure | Accuracy-MDL * | Resolution |
|---|---|---|---|
| SBE 37 MicroCAT (a) | Temperature (CTD) | ±0.002 °C | 0.0001 °C |
| YSI 600OMS (b) | Temperature (Multiparametric) | ±0.15 °C | 0.01 °C |
| Idronaut Ocean Seven CTD (c) | Temperature (CTD) | ±0.0015 °C | 0.0001 °C |
| Cyclops-7F Turner Design (d) | Chla Fluorescence | 0.03 µg/L | - |
| ECO FL Wetlabs (e) | Chla Fluorescence | 0.02 µg/L | - |
| SeaPoint (f) | Chla Fluorescence | 0.02 µg/L | - |
| UniLux Chelsea (g) | Chla Fluorescence | 0.01 µg/L | - |
| MicroFlu-chl Trios (h) | Chla Fluorescence | 0.02 µg/L | |
| EXO1 YSI (i) | Chla Fluorescence (Muliparametric) | 0.01 µg/L | - |
| ArLoC | Temperature | ±0.01 °C | 0.001 |
| Chla Fluorescence | 0.01 µg/L | - |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Piermattei, V.; Madonia, A.; Bonamano, S.; Martellucci, R.; Bruzzone, G.; Ferretti, R.; Odetti, A.; Azzaro, M.; Zappalà, G.; Marcelli, M. Cost-Effective Technologies to Study the Arctic Ocean Environment †. Sensors 2018, 18, 2257. https://doi.org/10.3390/s18072257
Piermattei V, Madonia A, Bonamano S, Martellucci R, Bruzzone G, Ferretti R, Odetti A, Azzaro M, Zappalà G, Marcelli M. Cost-Effective Technologies to Study the Arctic Ocean Environment †. Sensors. 2018; 18(7):2257. https://doi.org/10.3390/s18072257
Chicago/Turabian StylePiermattei, Viviana, Alice Madonia, Simone Bonamano, Riccardo Martellucci, Gabriele Bruzzone, Roberta Ferretti, Angelo Odetti, Maurizio Azzaro, Giuseppe Zappalà, and Marco Marcelli. 2018. "Cost-Effective Technologies to Study the Arctic Ocean Environment †" Sensors 18, no. 7: 2257. https://doi.org/10.3390/s18072257