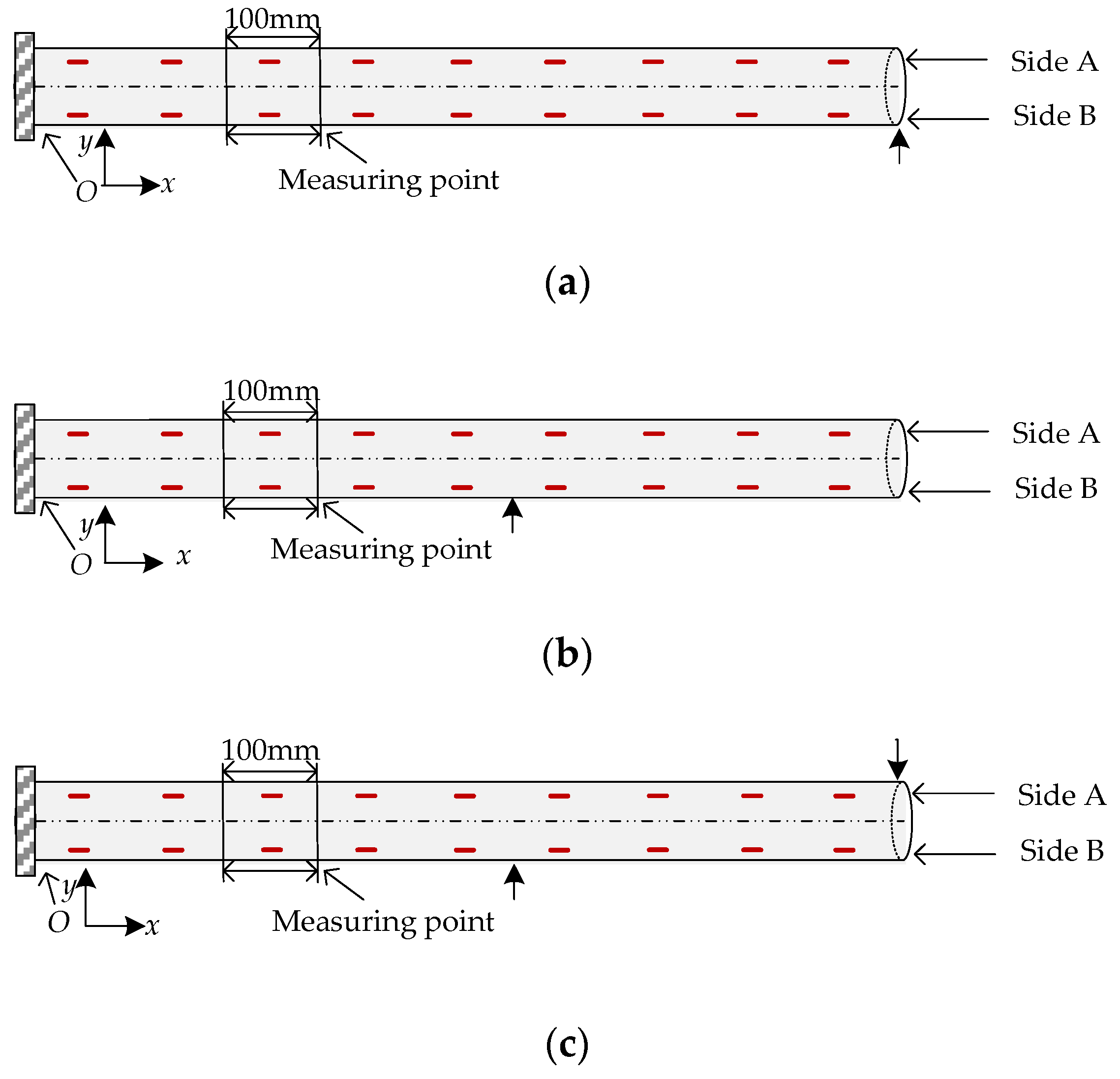
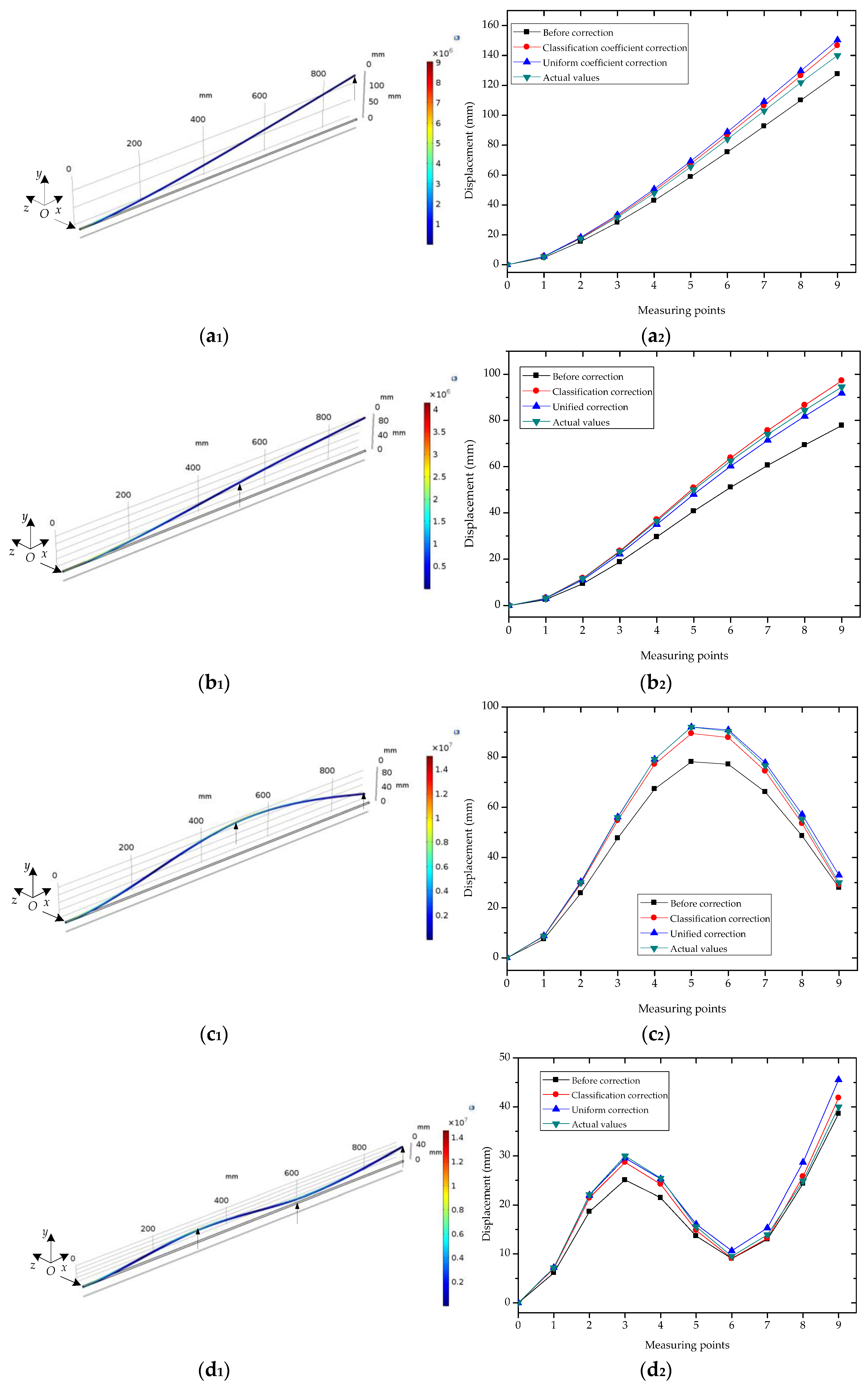
In this study, a finite element method was applied to simulate the bending shapes of the FBG implantable flexible morphological sensor, and to compare the morphological sensing effects which had been obtained by the unified coefficient and classification coefficient corrections. First, a cylinder model with a length of 900 mm and a diameter of 5 mm was established, as shown in
Figure 9a
1,b
1,c
1,d
1,e
1. The initial end center coordinates of the cylinder model was
O (0, 0, 0), and the cylinder model was divided into nine segments along the
x-axis. Each segment was taken as a detecting unit of the proposed FBG implantable flexible morphological sensor. The column material was ABS, and its mechanical property parameters were shown in
Table 4. In this study’s simulation, the cylinder model had a total of 4379 meshes with minimum unit masses of 0.351. Then, with consideration given to the geometrical nonlinearity of the material used in the simulation, an elastic model was selected.
A displacement constraint was fixed on one side of the cylinder model, and five different types of displacement were applied in order to simulate five different typical bending shapes. For Type 1 (
Figure 9a
1), a 140 mm displacement was applied along the
y-axis at (900, −2.5, 0) in the cylinder model. For Type 2 (
Figure 9b
1), a 50 mm displacement was applied along the
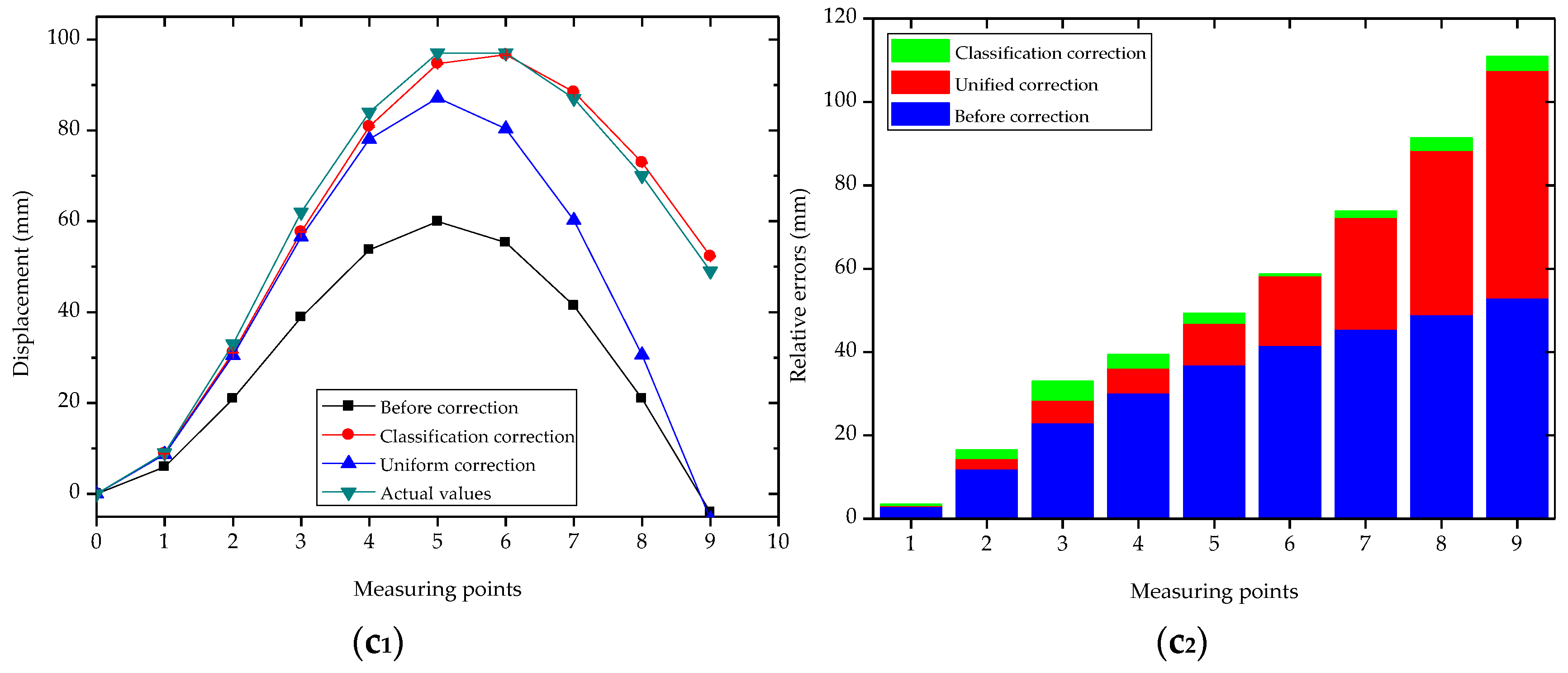
y-axis at (500, −2.5, 0). For Type 3 (
Figure 9c
1), 92 mm and 30 mm displacements were applied along the
y-axis at (500, −2.5, 0) and (900, −2.5, 0), respectively. For Type 4 (
Figure 9d
1), 30 mm, 9.5 mm, and 40 mm displacements were applied along the
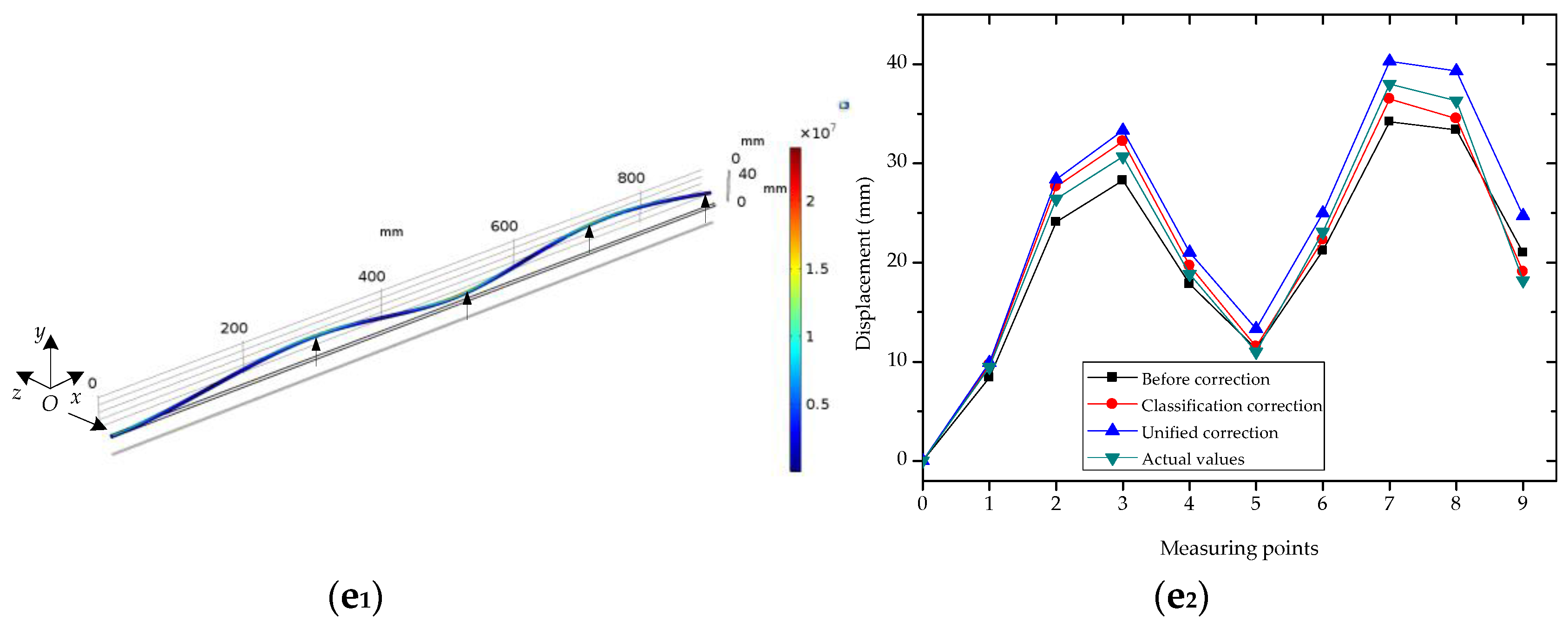
y-axis at (300, −2.5, 0), (600, −2.5, 0), and (900, −2.5, 0), respectively. For Type 5 (
Figure 9e
1), 30.7 mm, 11 mm, 38 mm, and 18.2 mm displacements were applied along the
y-axis at (300, −2.5, 0), (500, −2.5, 0), (700, −2.5, 0), and (900, −2.5, 0), respectively. For the five typical bending shapes, the strain value at
i = 0, 1, ... 8 in the coordinate points of
Si (50 + 100*
i, −2.5, 0) were extracted from the cylinder model. Meanwhile, the displacement at
j = 1, 2, ... 9 in the coordinate points of
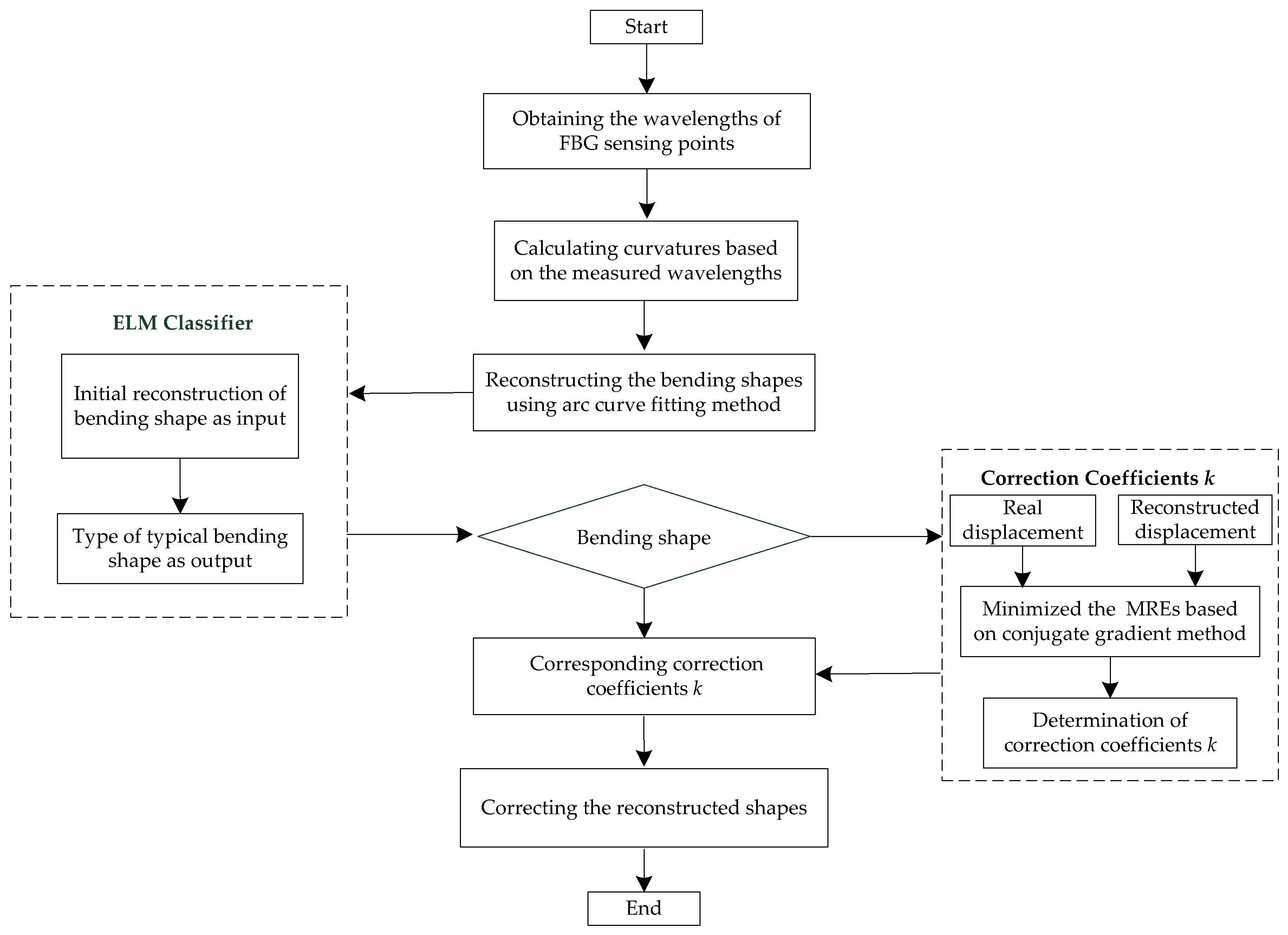
Pj (100*
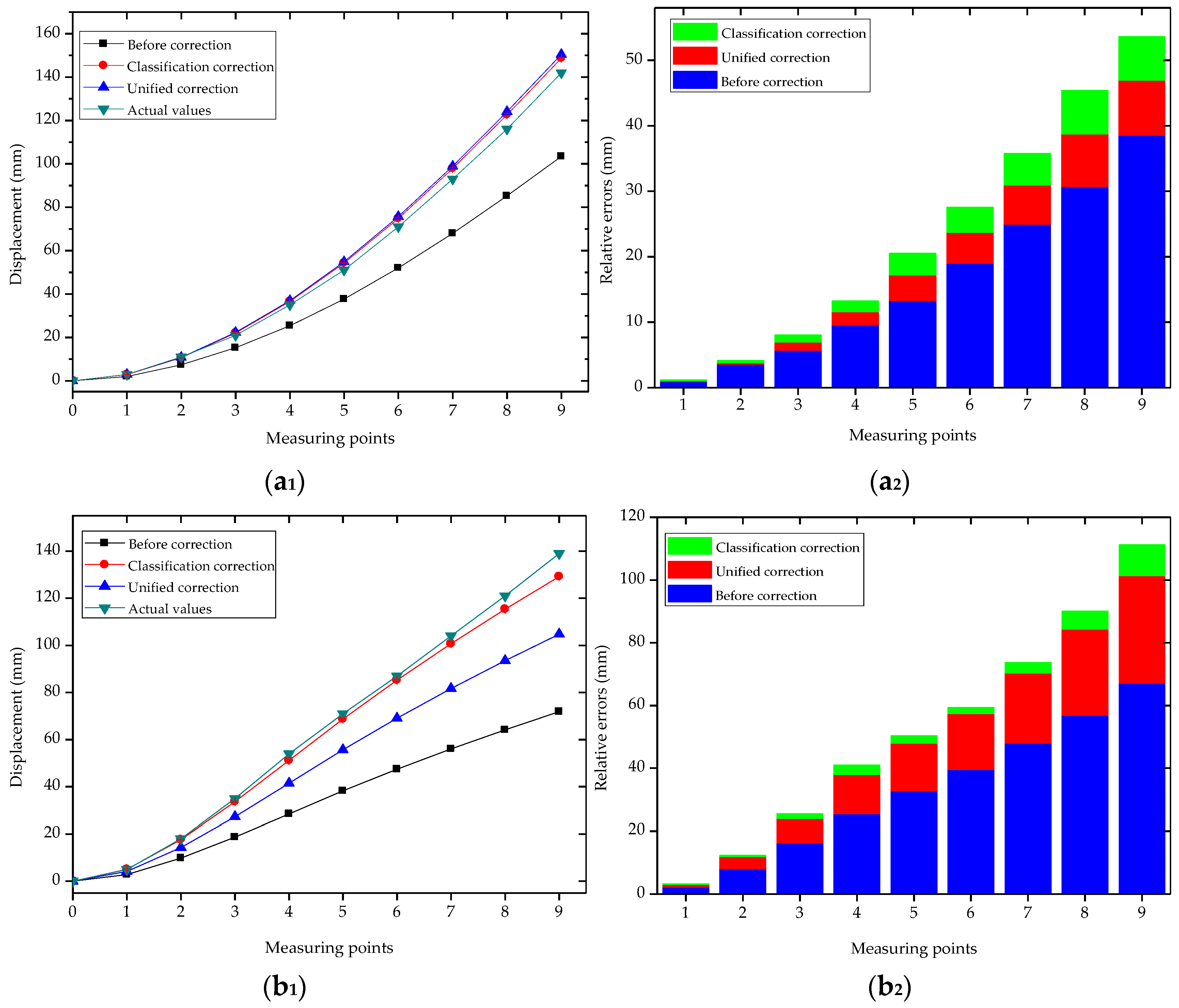
j, −2.5, 0) were extracted as the standard displacement values. The strain values which had been extracted were used for the first reconstruction of the different bending shapes of the cylinder model by arc curve fitting method, in order to obtain the displacement of the measuring points under different bending shapes, as shown in
Figure 9a
2,b
2,c
2,d
2,e
2. It was observed that, having been influenced by multiple factors (such as the accumulated errors of detecting units), there were certain errors between the first reconstructed displacement and the simulated displacement. For Types 1 and 2, the relative errors of the measuring points away from the fixed end had gradually increased (with maximum errors of 12.36 mm and 16.66 mm, respectively), and both were located at the ninth measuring point. This was determined to be due to the fact that the cylinder model had undergone uniaxial stress conditions for Types 1 and 2, and each measuring point displayed the same displacement error direction. The displacement errors of the measuring points tended to accumulate point by point. However, for Types 3, 4, and 5, the measuring points with the maximum relative errors were located in the fifth, third, and seventh points, with relative error values of 13.81 mm, 4.93 mm, and 3.79 mm, respectively. These results may be due to the fact that the cylinder model had undergone multidirectional stress conditions for Types 3, 4, and 5, and the displacement errors of the measuring points displayed the phenomena of positive and negative error offsets.
During this study’s experimental process, based on the actual applied displacement as the benchmark, weighted corrections were conducted on the first reconstructed morphology. Then, a conjugate gradient method was adopted to define the correction coefficient of each morphology. As detailed in
Table 5, correction coefficients for Types 1 and 2 were determined to be
k1 = 1.15 and
k2 = 1.25, respectively. For Types 3, 4, and 5, the correction coefficients of the extracted positive and negative strain values were
k3+ = 1.15 and
k3− = 1.17,
k4+ = 1.14,
k4− = 1.18,
k5+ = 1.19,
k5− = 1.21, respectively. The unified correction coefficient was the average of
k1,
k2,
k3+,
k3−,
k4+,
k4−,
k5+, and
k5−, and denoted as
= 1.18.
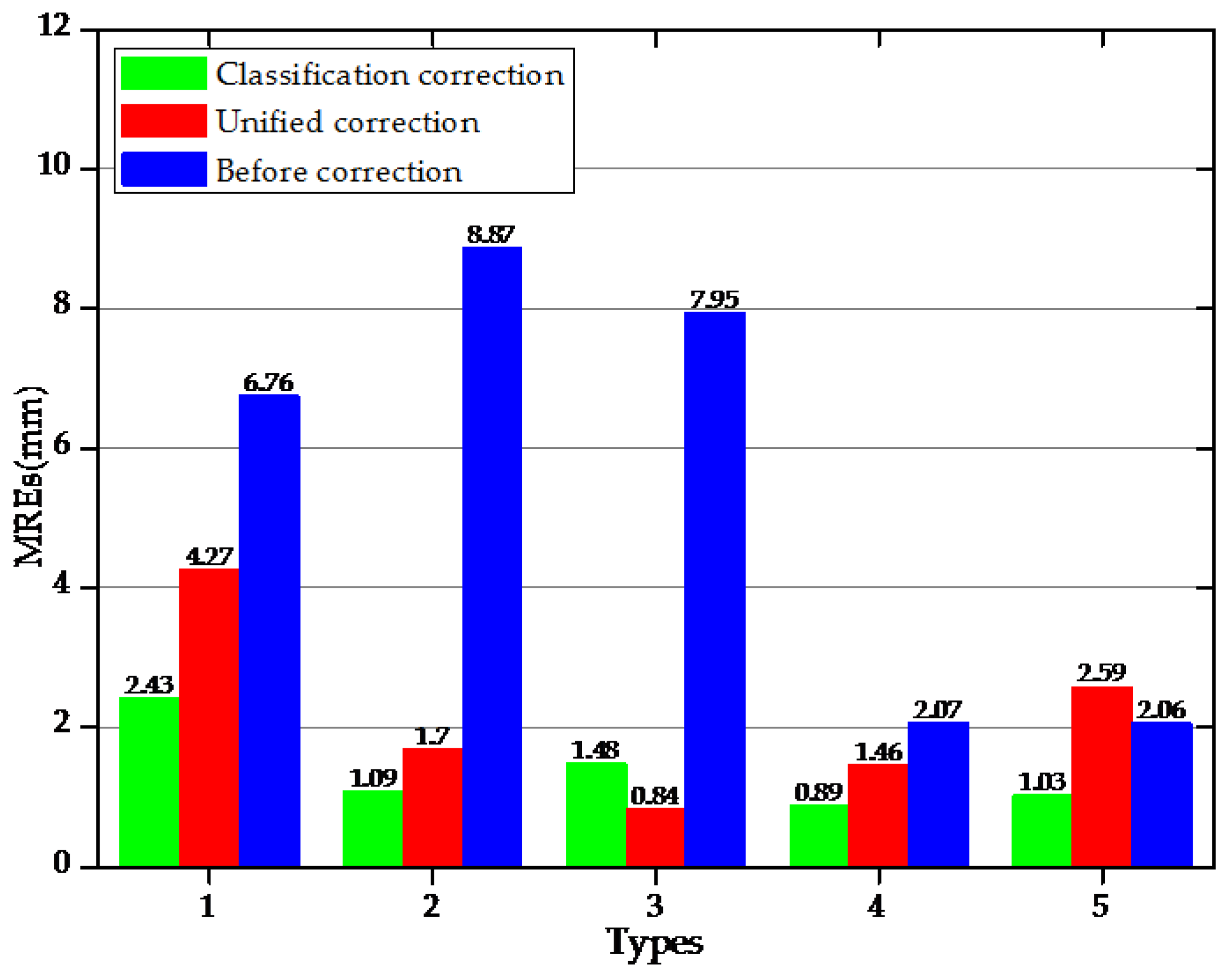
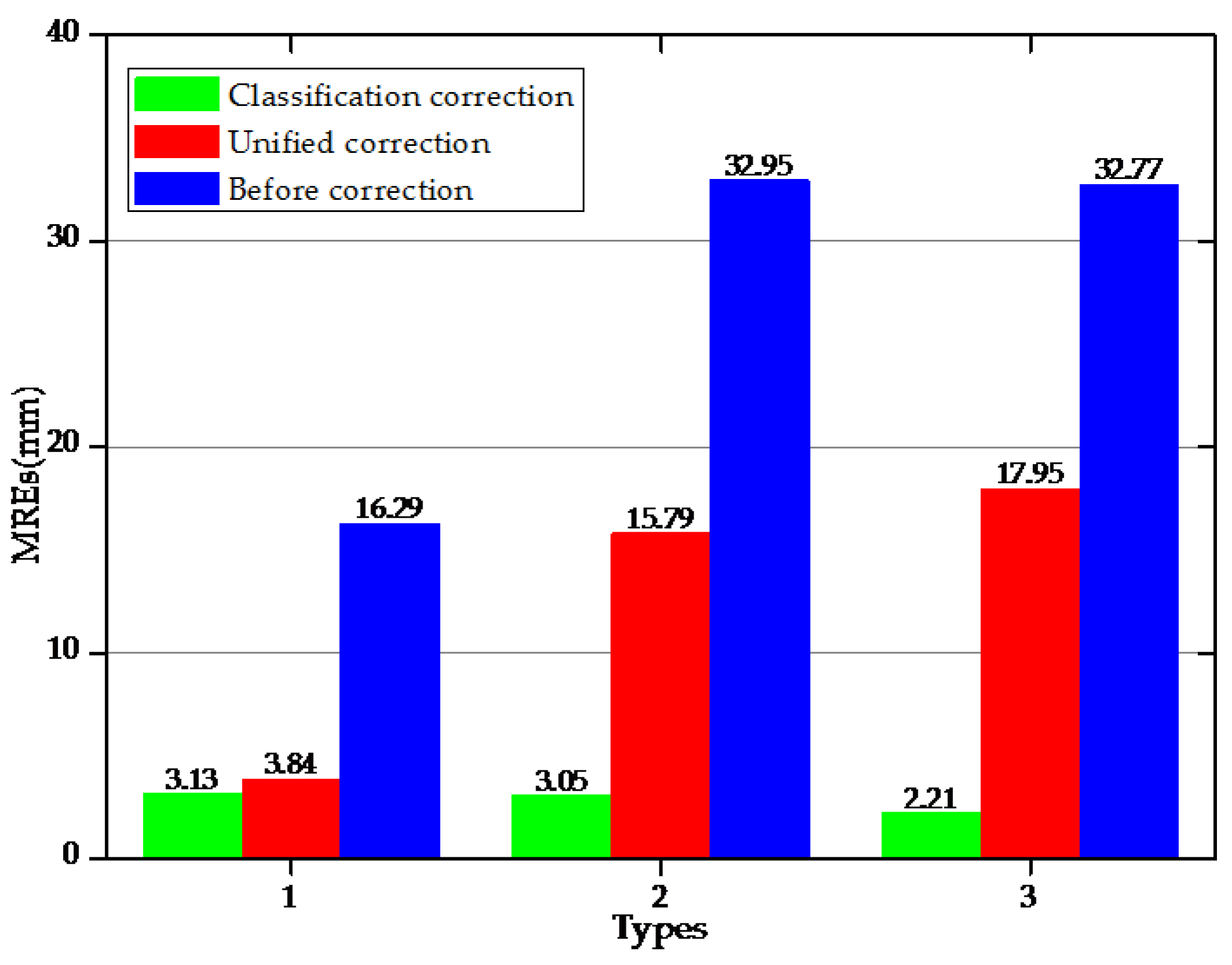
Figure 10 shows the MREs of the sensing displacement of the cylindrical model under the five bending shapes based on different correction methods. It was observed that under the different bending shapes, the MREs of the measuring points were significantly different when the strain values in the center of the detecting units were corrected using the unified coefficients. For Types 1, 2, 3, and 4, the MREs of the corrected measuring points were determined to decline, of which that of Type 3 displayed the minimum decline of 0.84 mm, while that of Type 1 displayed the maximum decline of 4.27 mm. For Type 5, the MREs had increased following the corrections of the unified coefficients. However, for the different bending shapes, the errors in the measuring points which had been corrected by the different coefficients had obviously decreased. The MREs had been reduced by 4.33 mm (Type 1), 7.78 mm (Type 2), 6.47 mm (Type 3), 1.18 mm (Type 4), and 1.03 mm (Type 5), respectively, after the classification corrections. These findings indicated that, when compared with the unified coefficient corrections, the classification corrections of the different bending shapes had improved the measurement precision of the displacements, which confirmed that it was necessary to use different coefficient corrections for the various bending shapes.

 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}