Time-Frequency Energy Sensing of Communication Signals and Its Application in Co-Channel Interference Suppression

Abstract
:1. Introduction
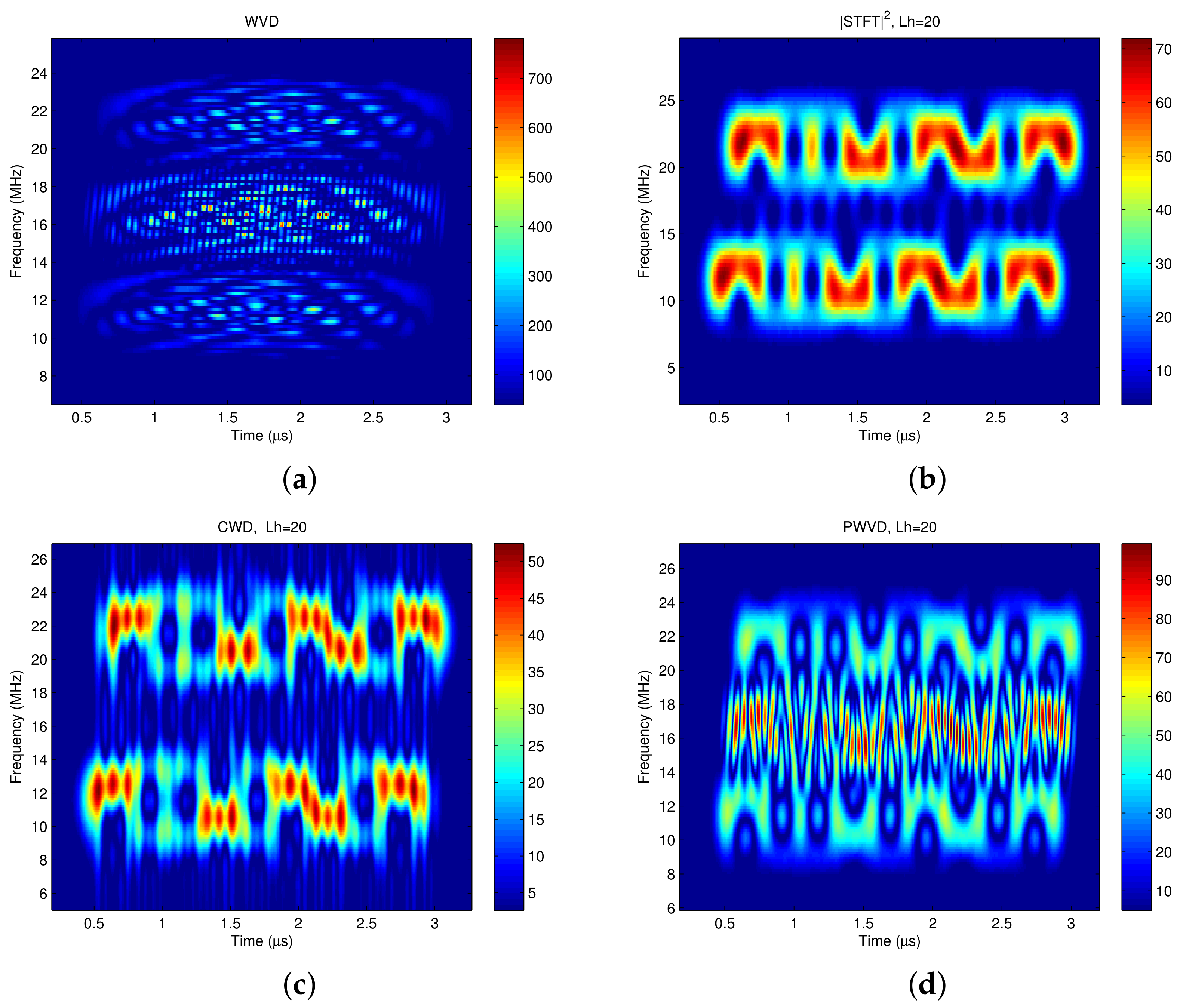
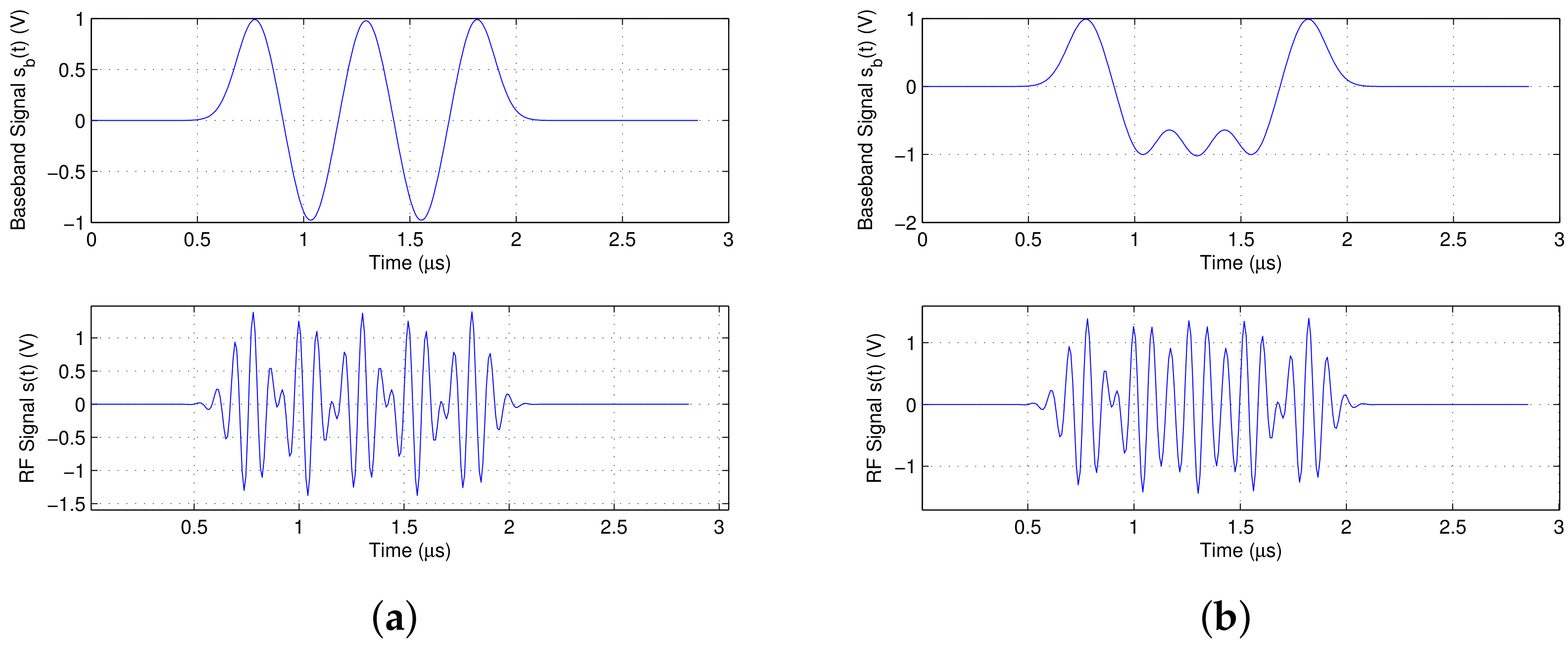
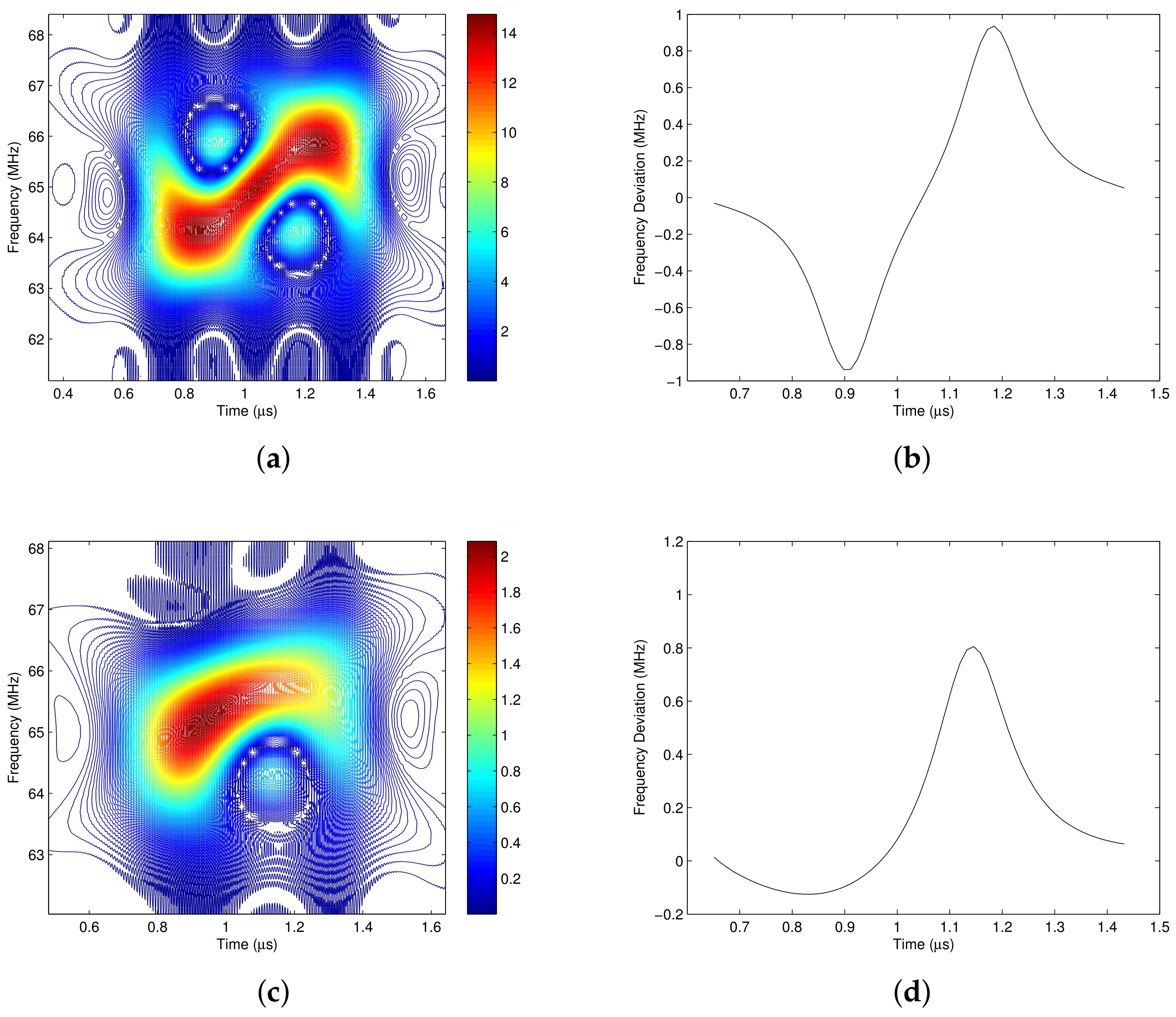
- The time frequency distributions of various communication signals are first analyzed via Choi-Williams analysis. The quadrature modulated signals’ center frequency and bandwidth are not constant, but vary with time in the passband, and their distributions are irregular. Hence, it is a challenge to design the pass region for the time-varying filter. Fortunately, the distributions of the baseband and the binary modulated pulse shaping signals are regularly time-varying, which facilitates the pass region generation procedure.
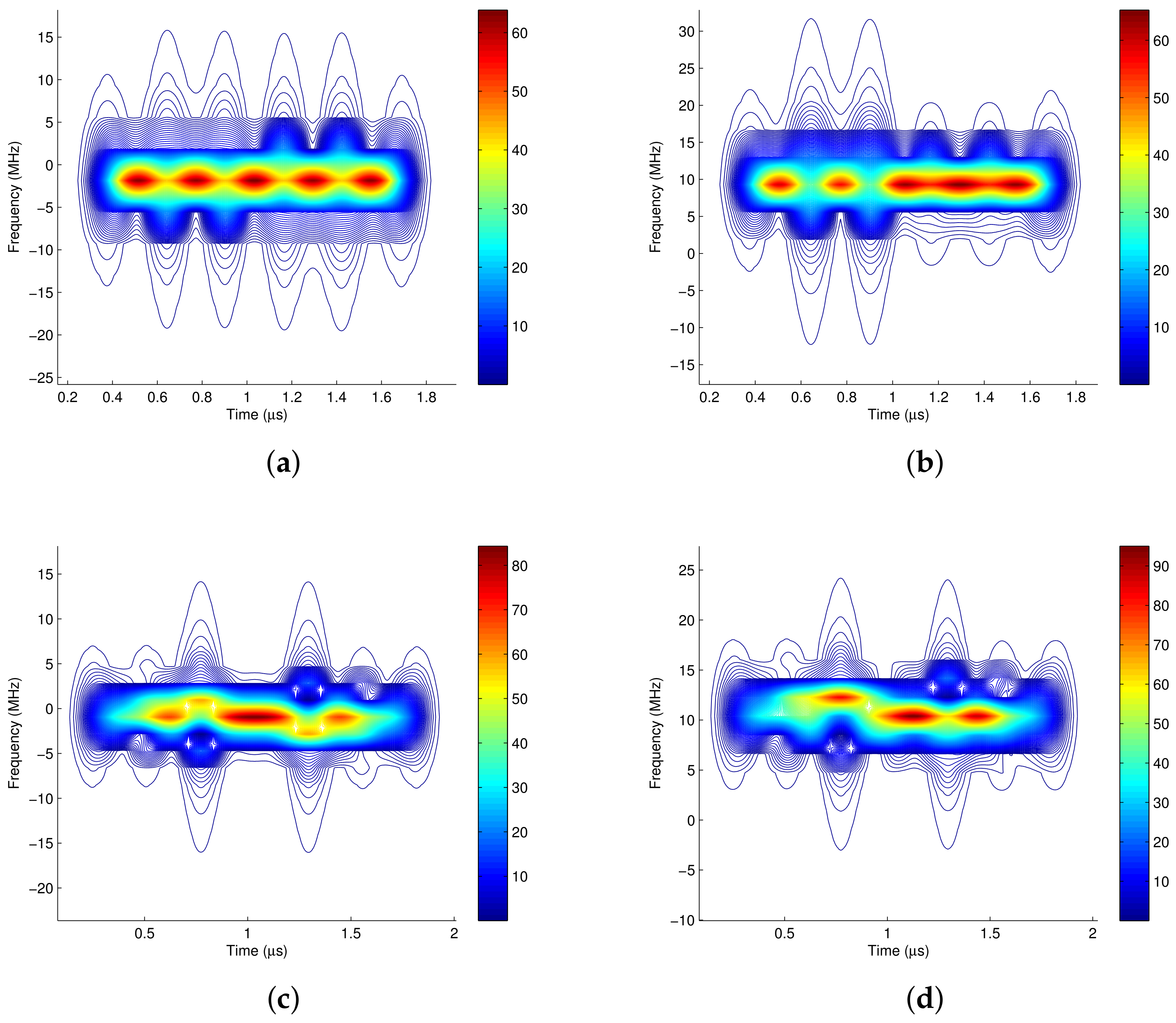
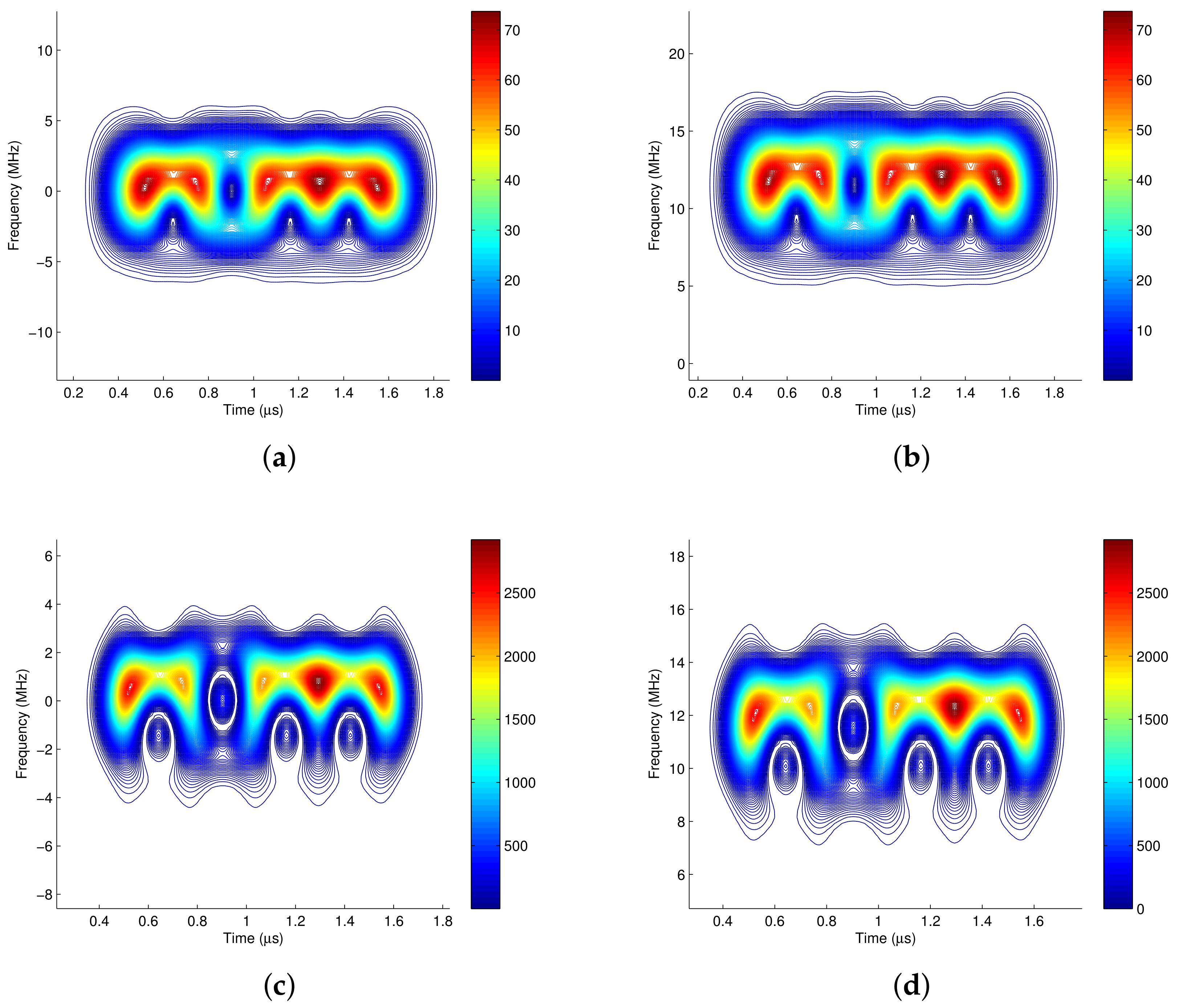
- The equivalence of baseband and RF power spectrum is obvious with Fourier transform. However, since the time frequency distribution is preprocessed by the analysis window, the window length will affect the equivalence of the time frequency distribution of the baseband and RF signals. Two methods are proposed to guarantee the consistence of the time frequency distribution of the baseband and RF signals by adjusting the window length and zero padding.
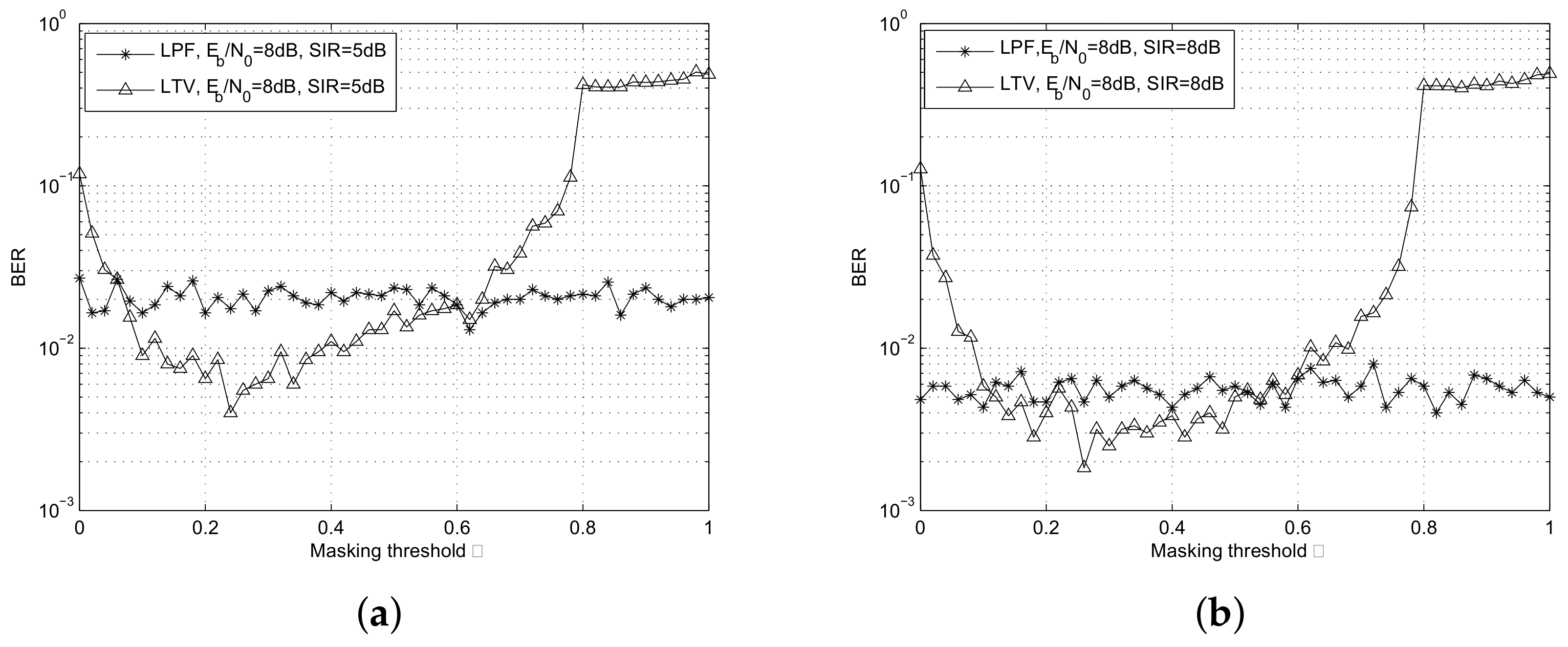
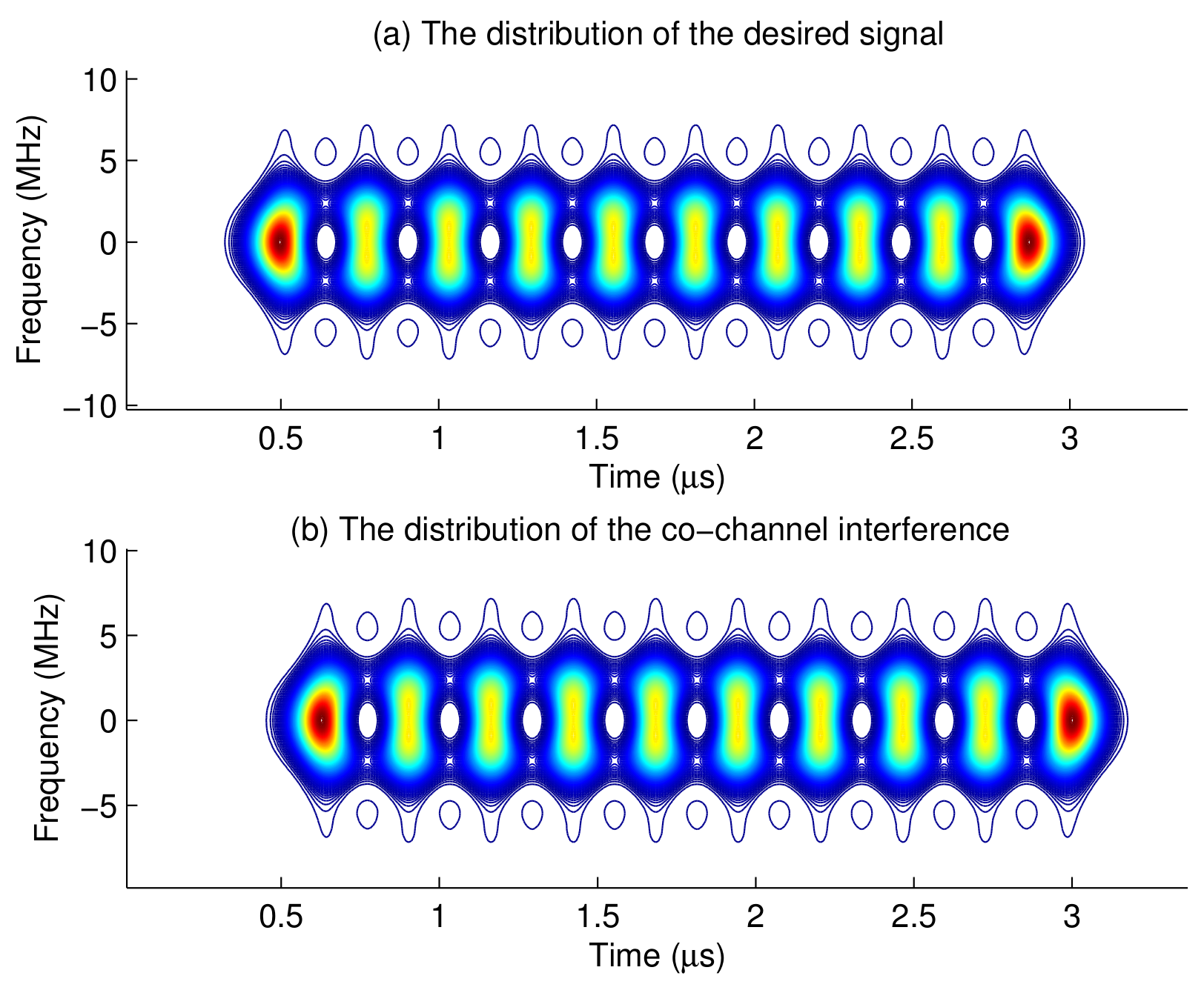
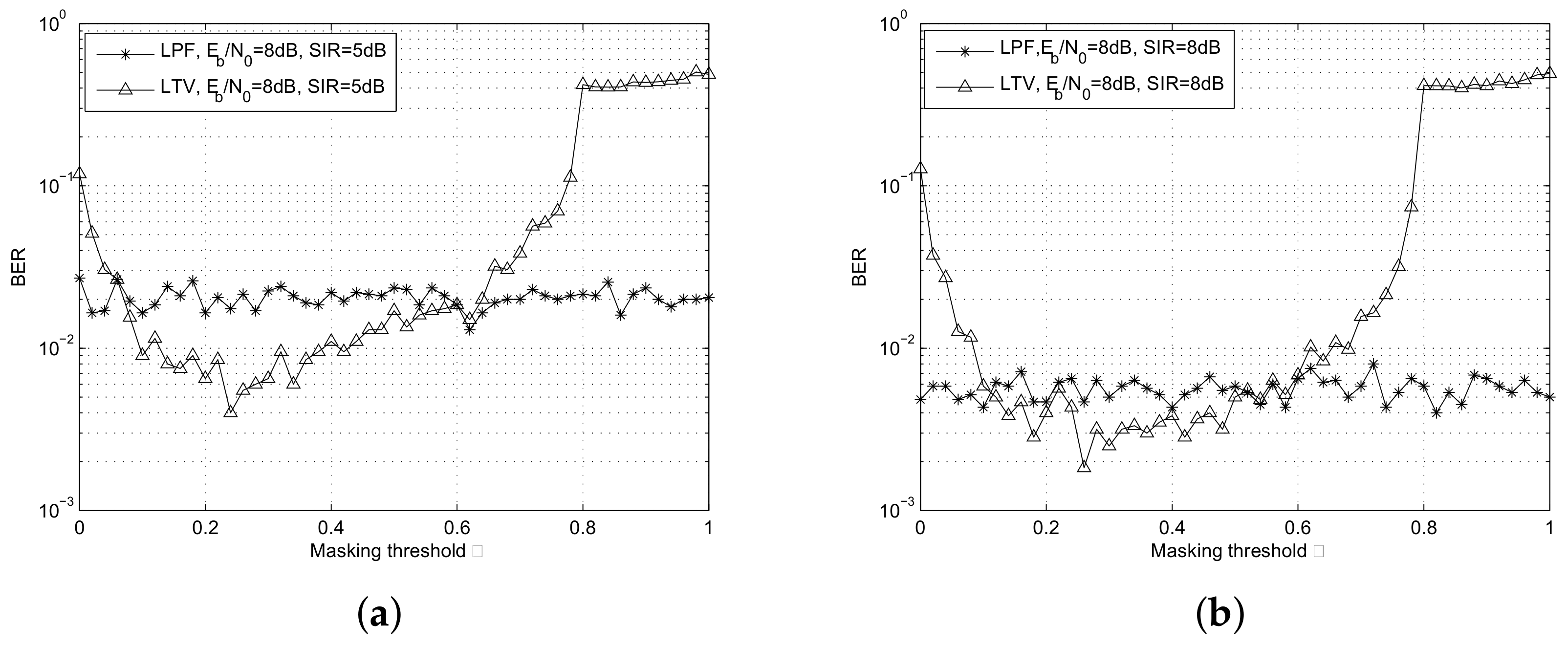
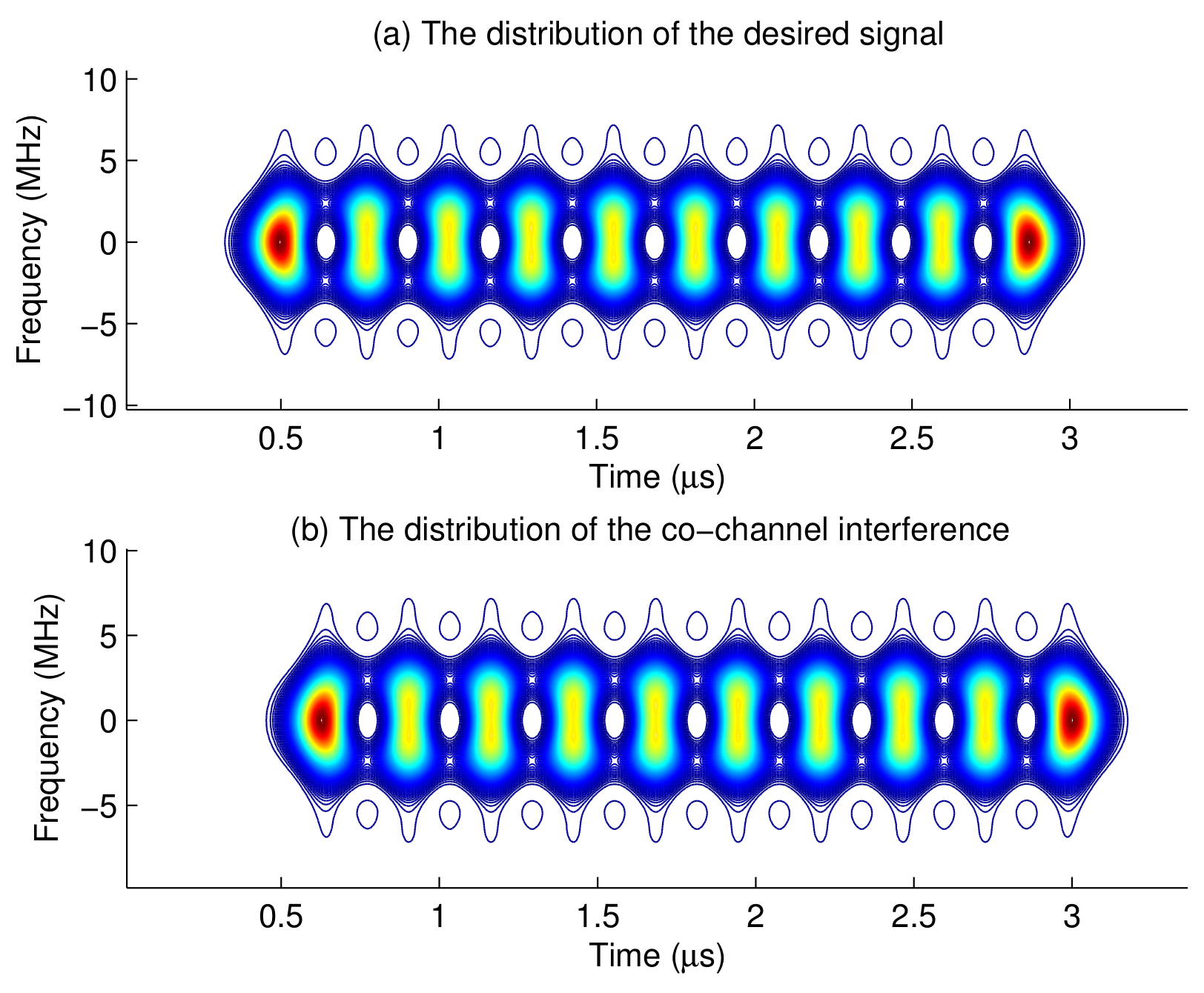
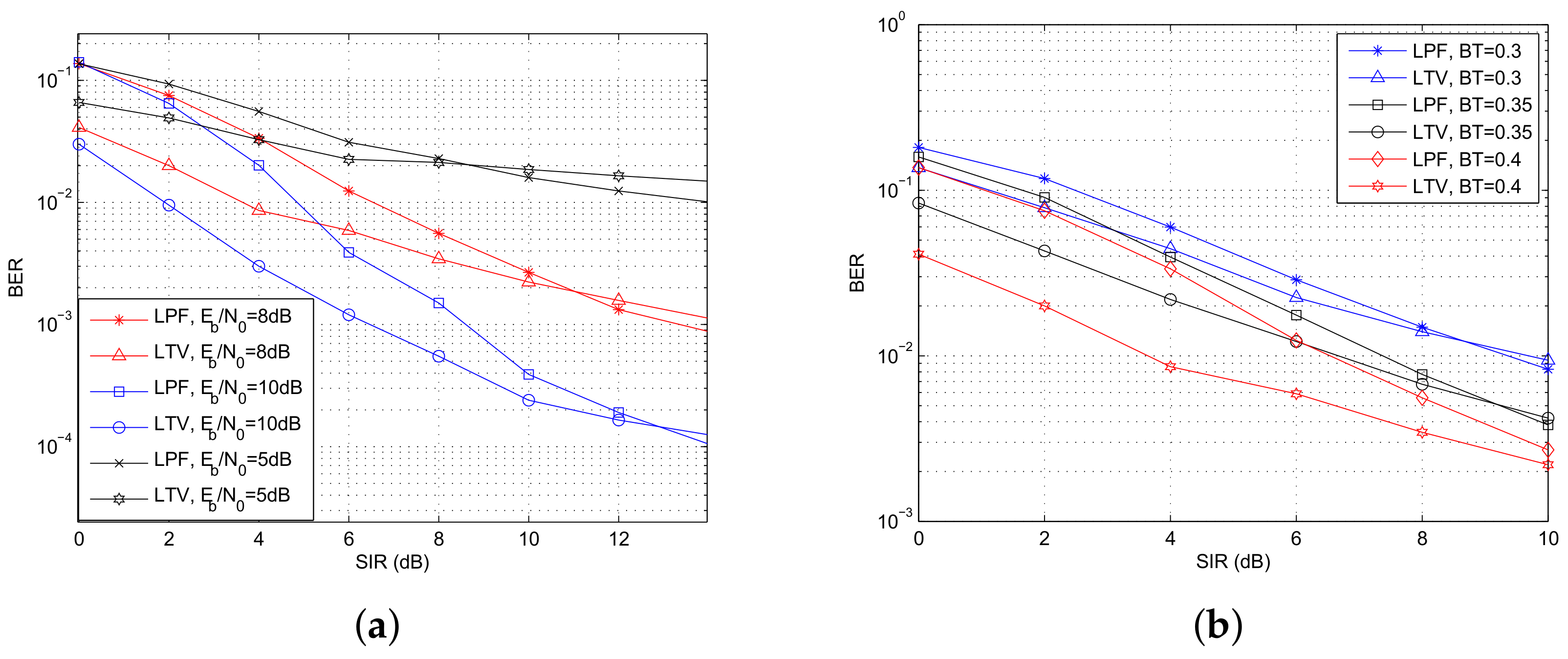
- To suppress the non-orthogonal or co-channel interference, the explicit linear time varying filter is applied to mitigate the interference according to the energy distribution of the desired signal. Correspondingly, a masking threshold constrained time varying filter is developed with the optimal masking threshold determined by the minimum BER criterion.
2. Concept of Time Frequency Analysis and Processing
2.1. Choi-Williams Distribution
2.2. Explicit Time-Varying Filter Implementations
3. Time-Frequency Distribution of Communication Signals
3.1. Time-Frequency Distribution of the Binary Modulated Signal
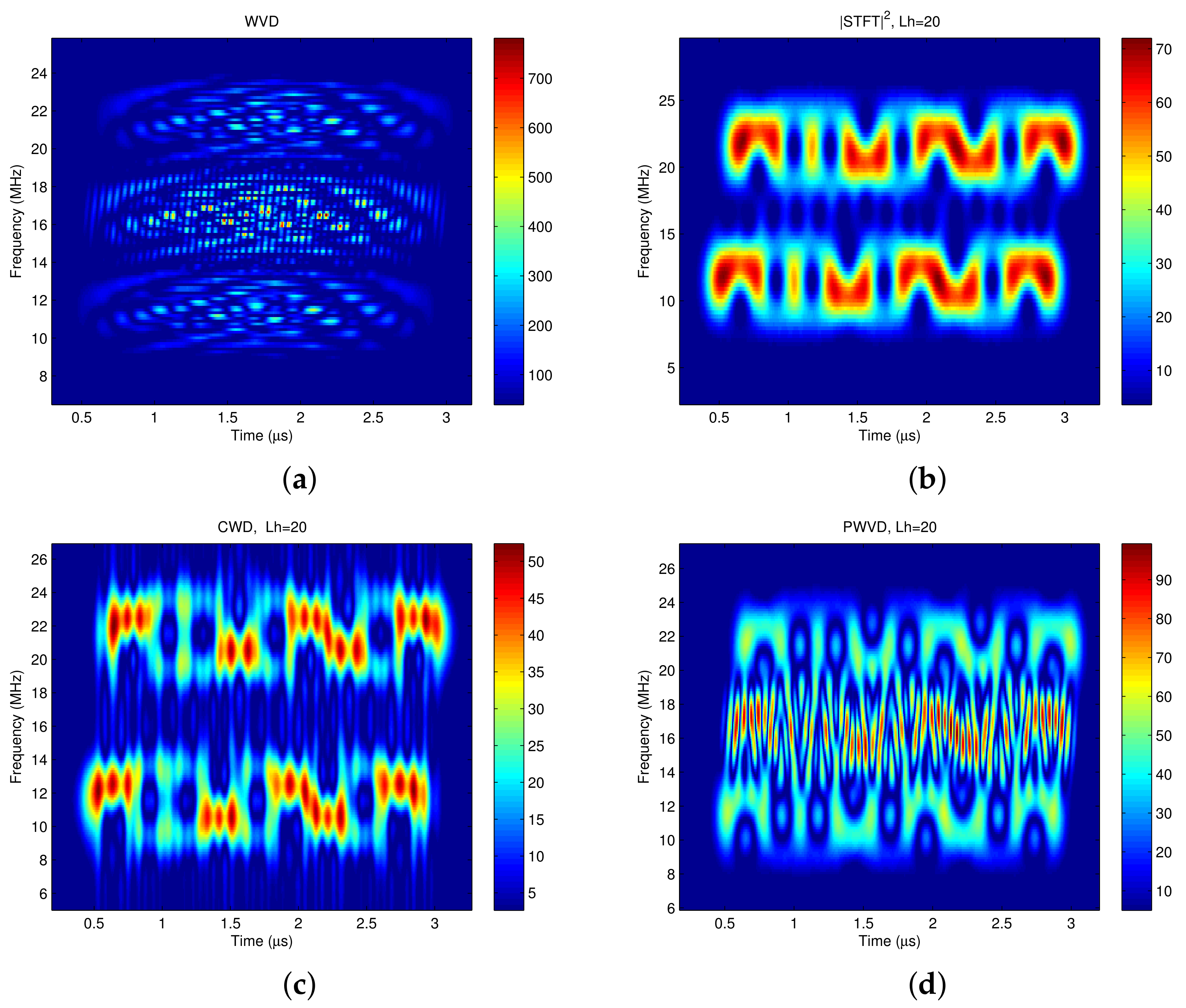
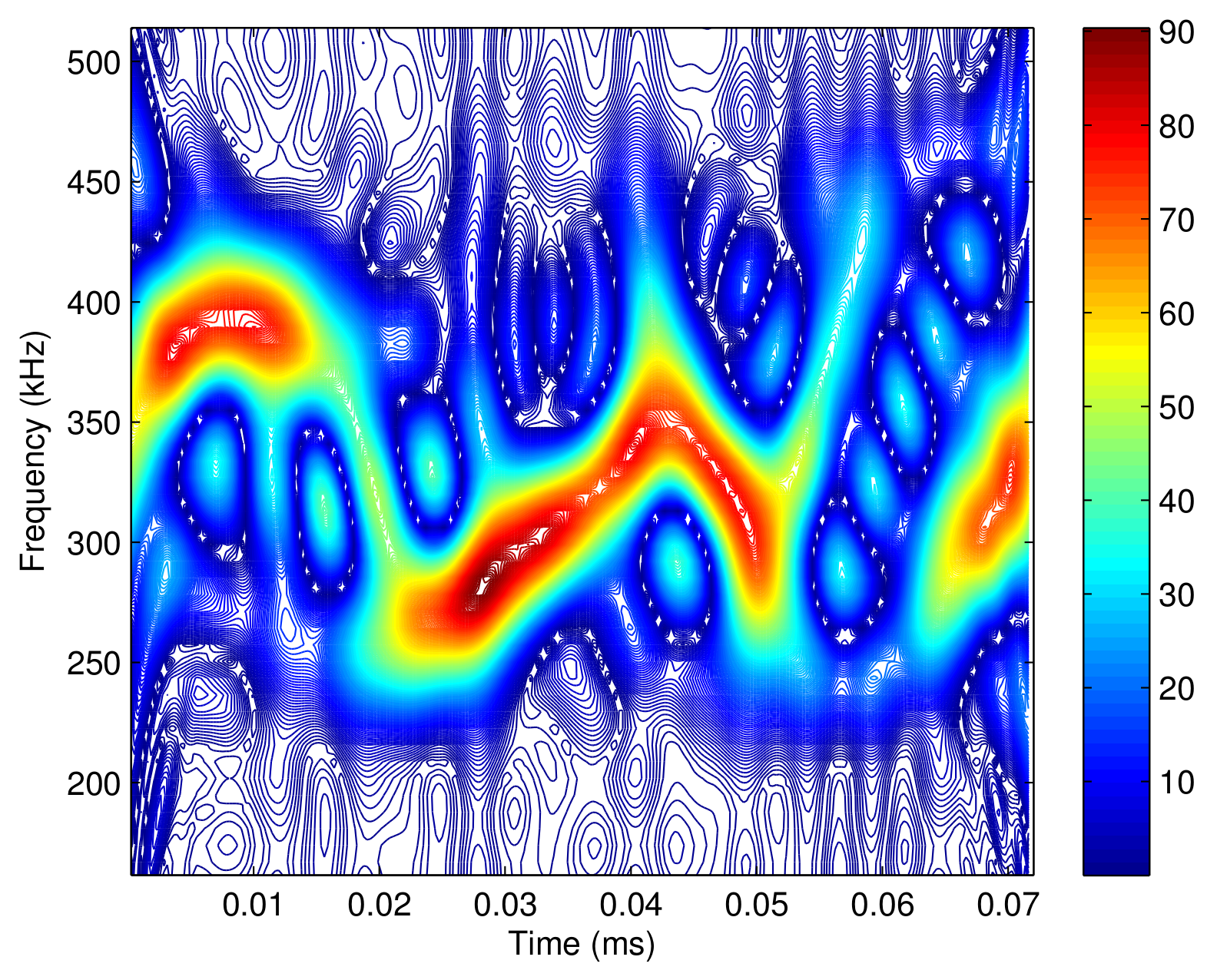
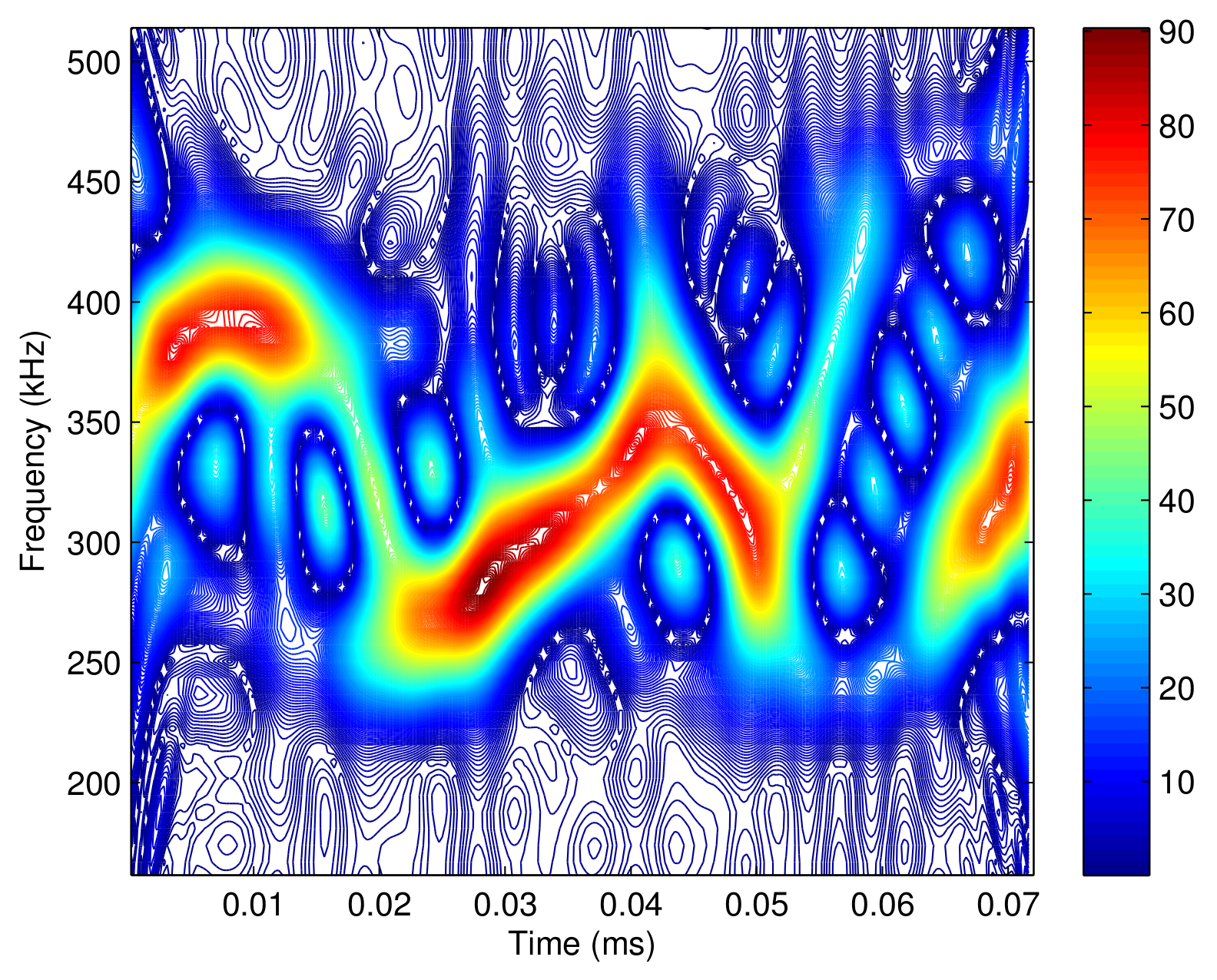
3.2. Time Frequency Distribution of Quadrature Modulated Signal
3.3. The Time Frequency Distribution of I/Q Separated Signals
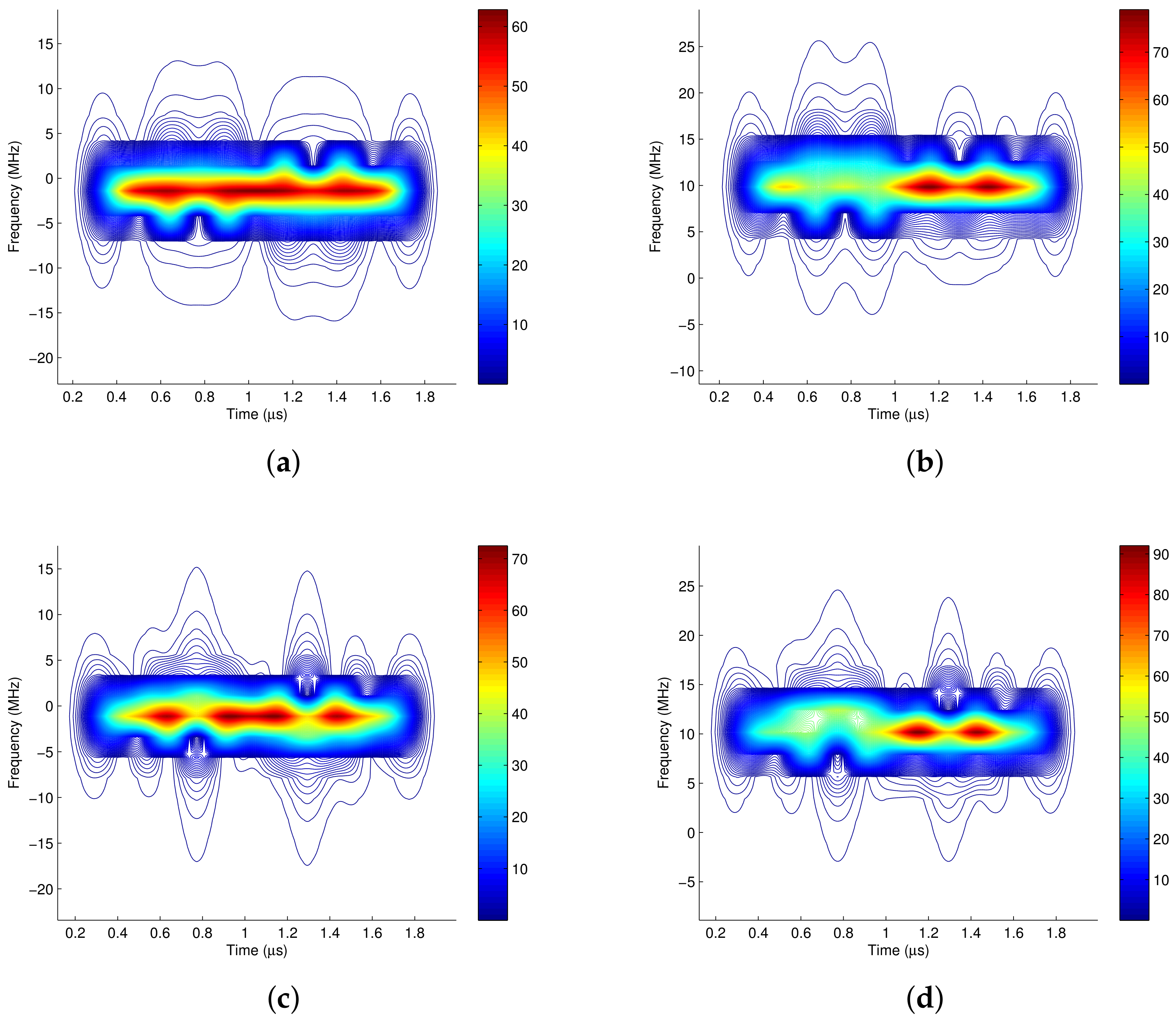
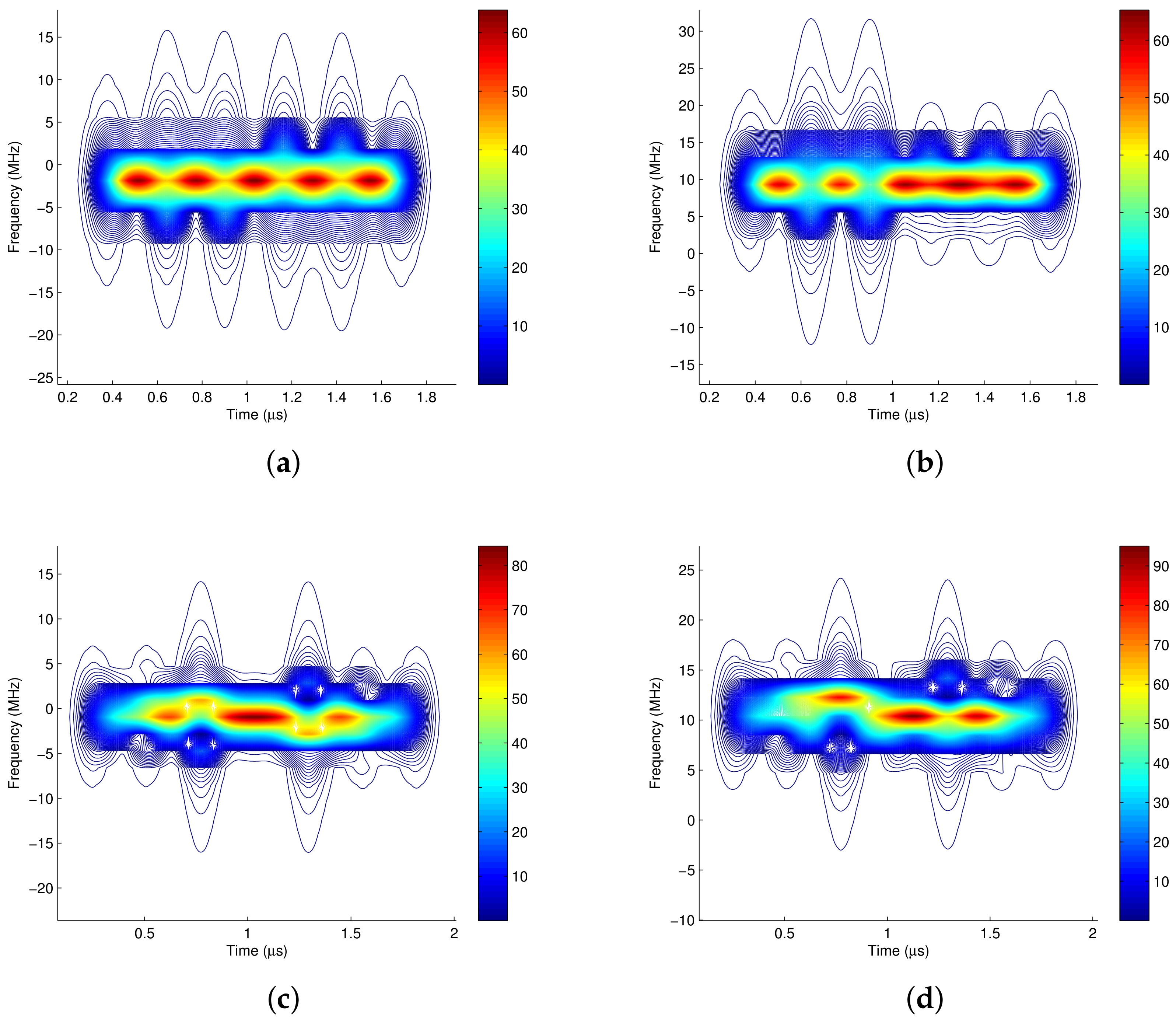
3.4. The Equivalence of RF and Baseband Analysis
4. Masking Threshold Constrained Time-Varying Filter
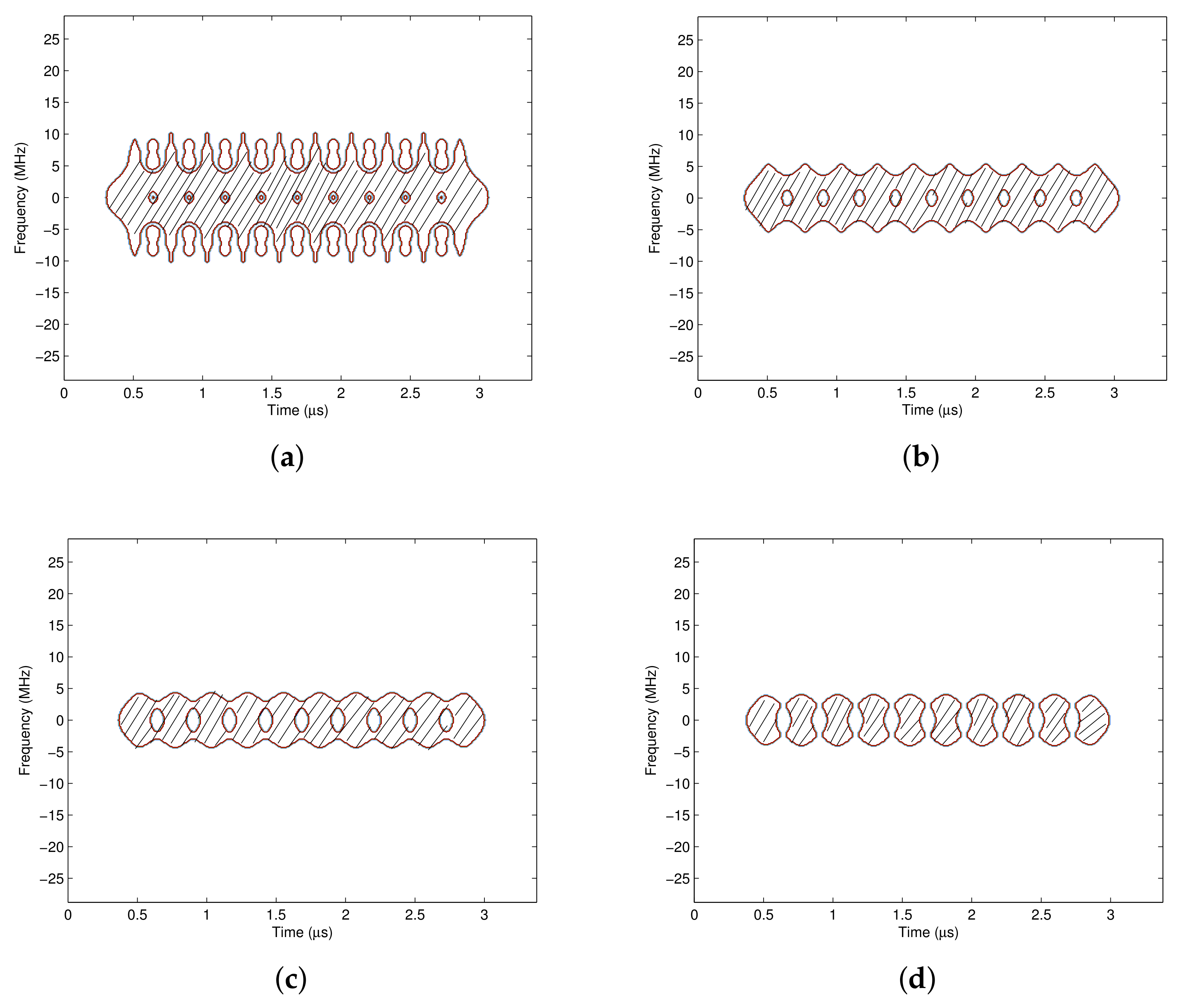
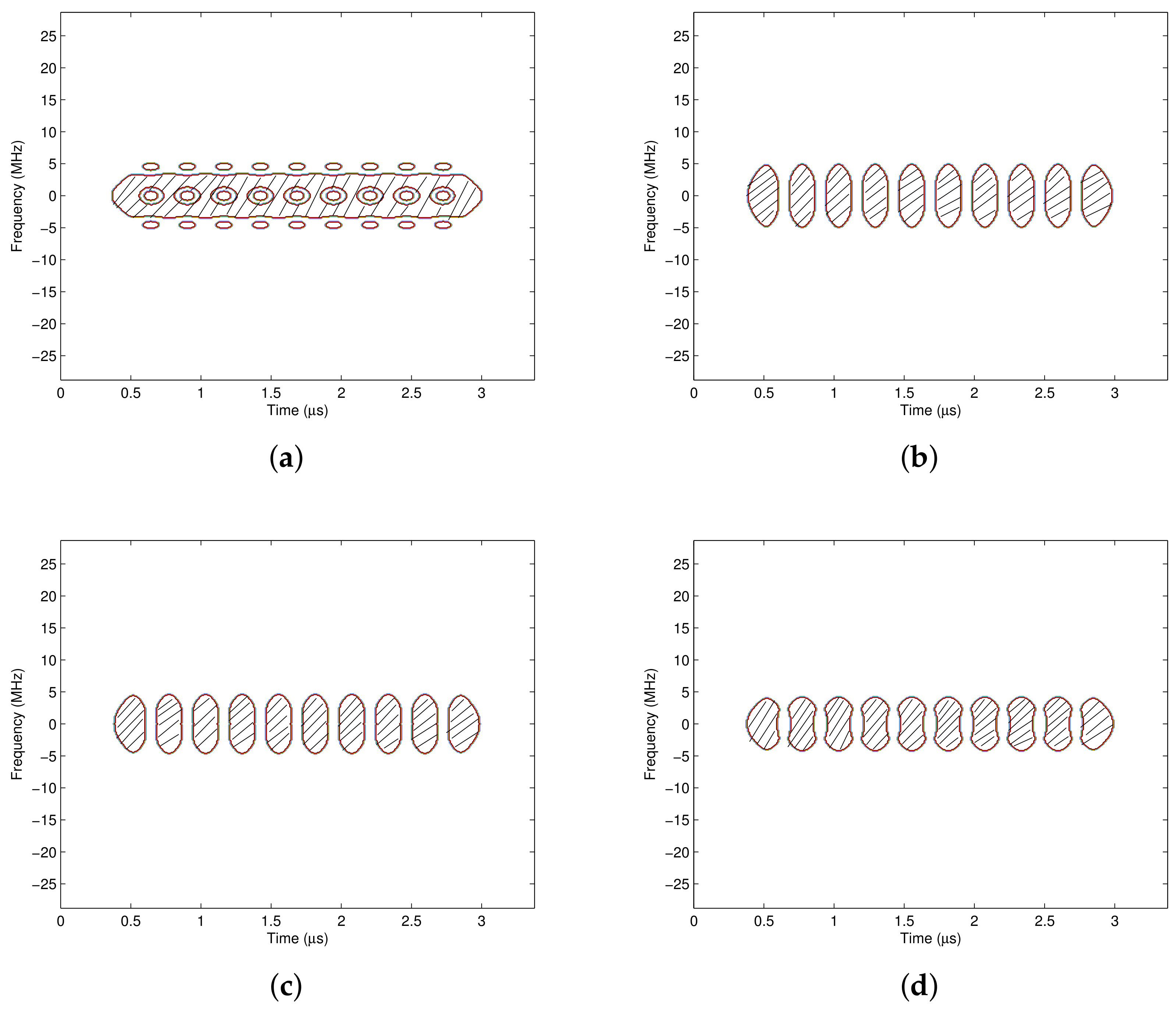
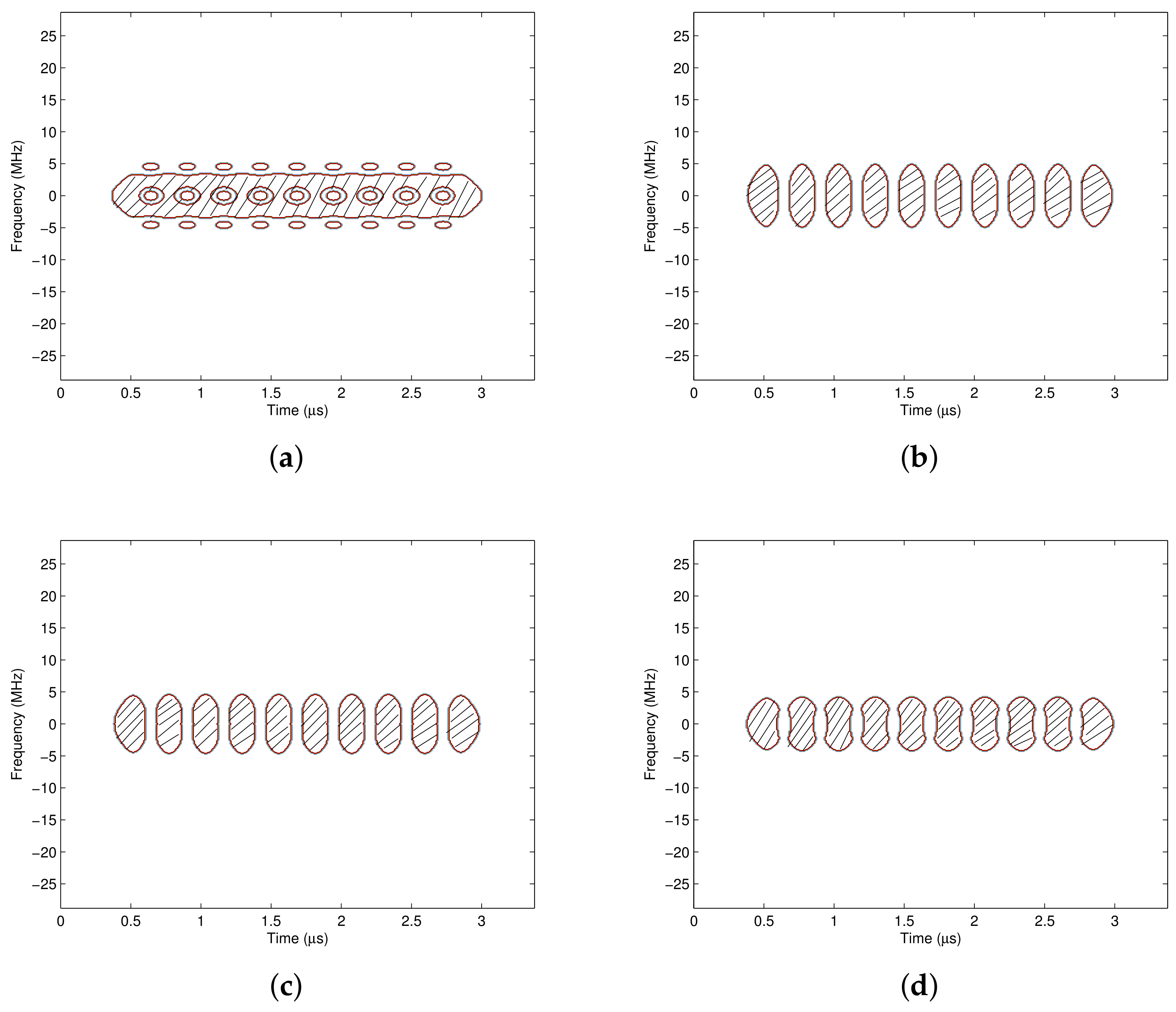
4.1. The Pass Region Generation
- Step 1: Generate the 1/−1 alternate data sequence. If the processing window length of the time-varying filter is , the number of the generated data is N.
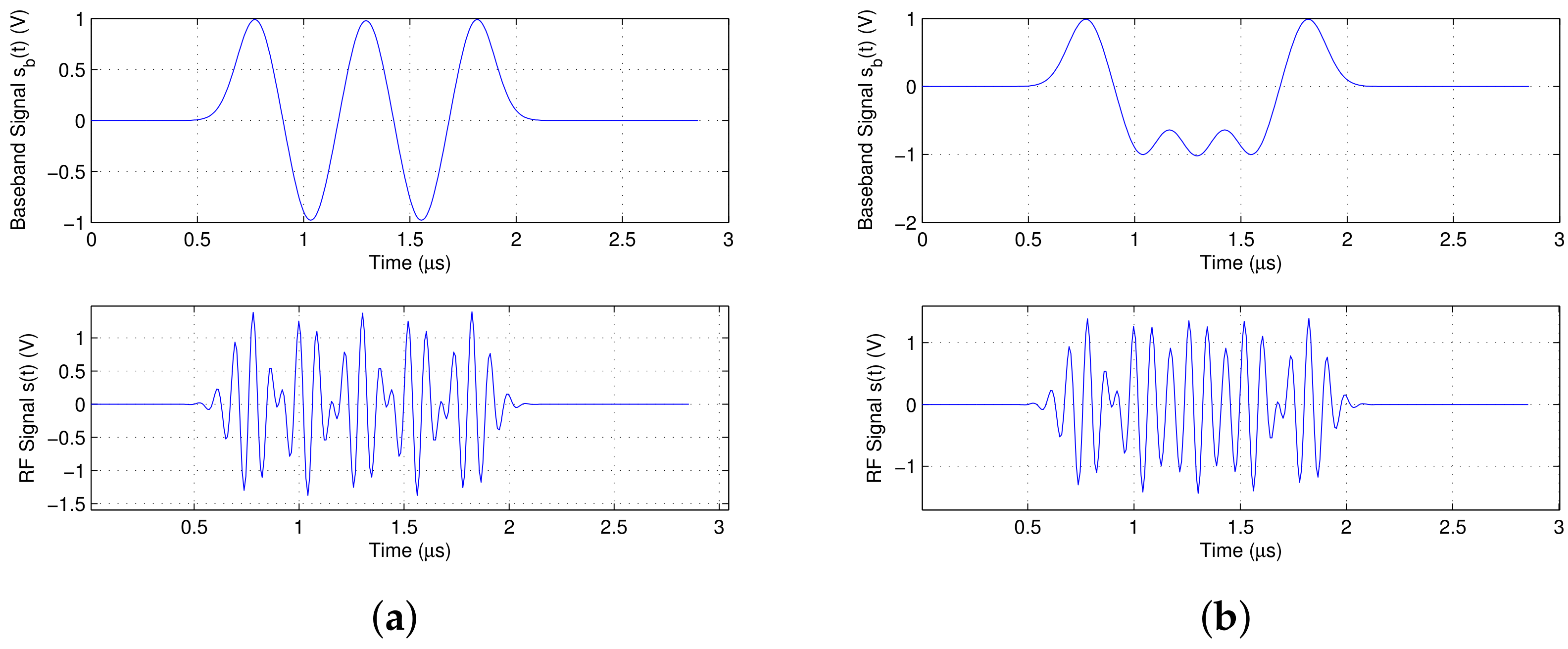
- Step 2: The data sequence passes through the pulse shaping filter, and the pulse shaped baseband signal is generated.
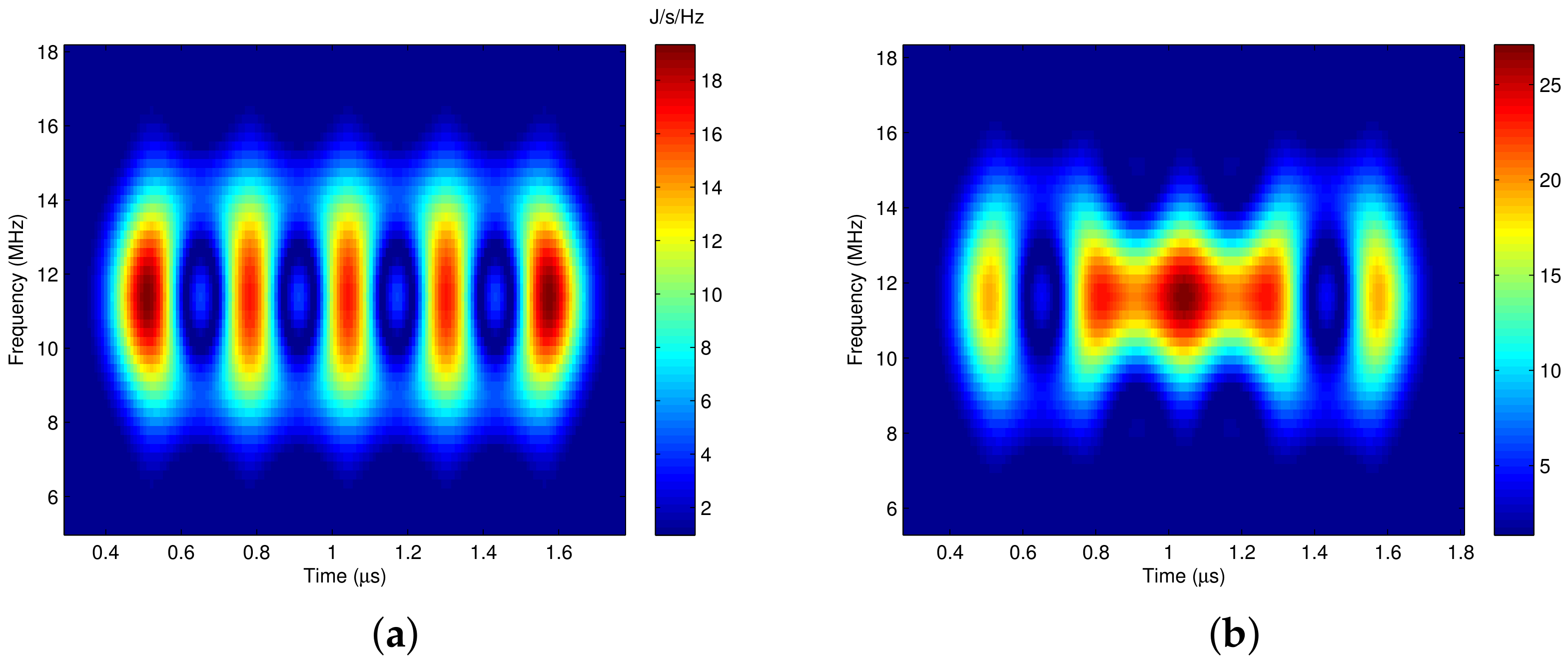
- Step 3: Calculate the time frequency distribution of , and obtain .
- Step 4: Generate the pass region R with the pre-defined masking threshold . , where is the maximum value of , i.e., .
- Step 5: Construct the time frequency weighting function according to the pass region R, which is shown in (11).
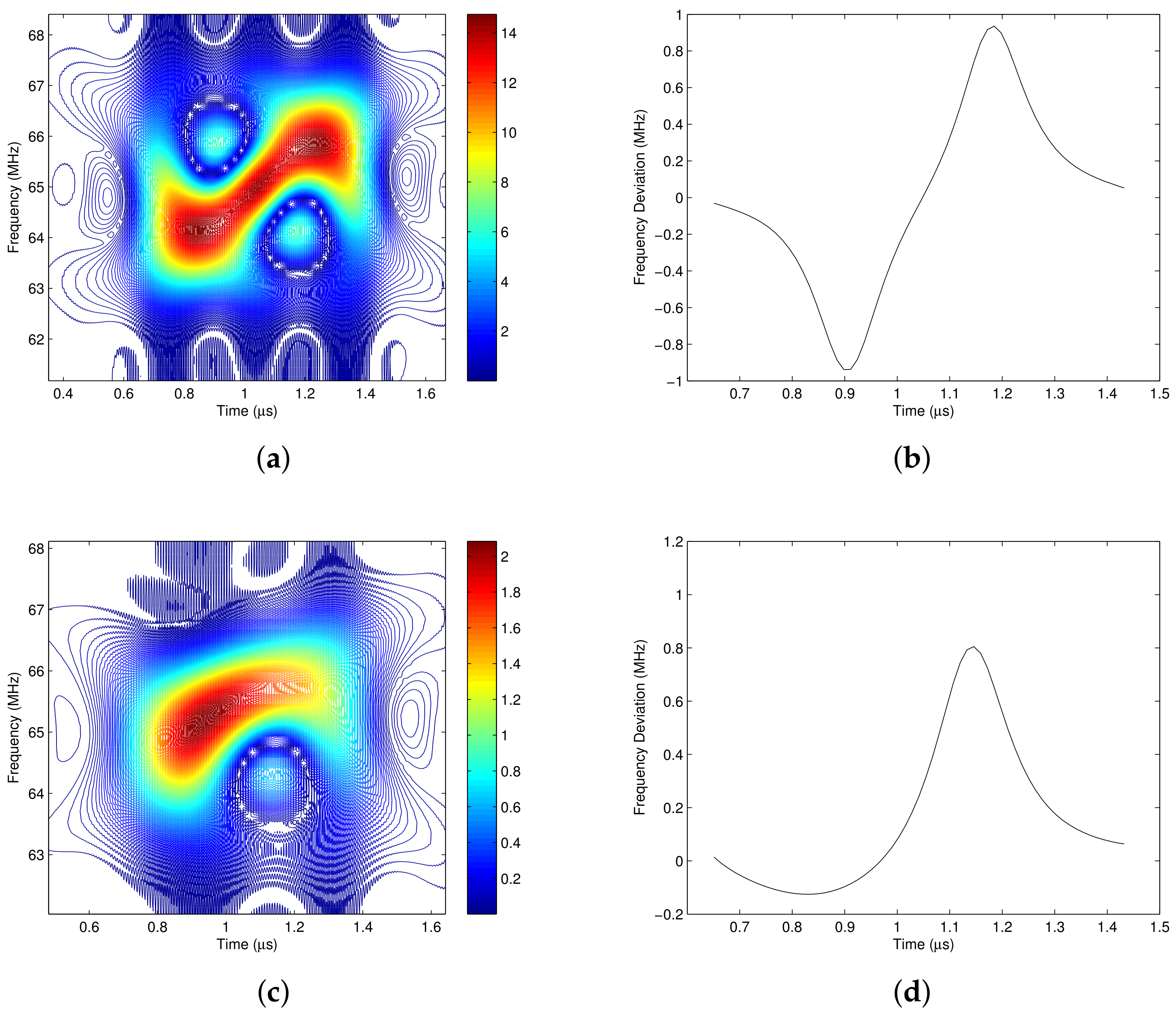
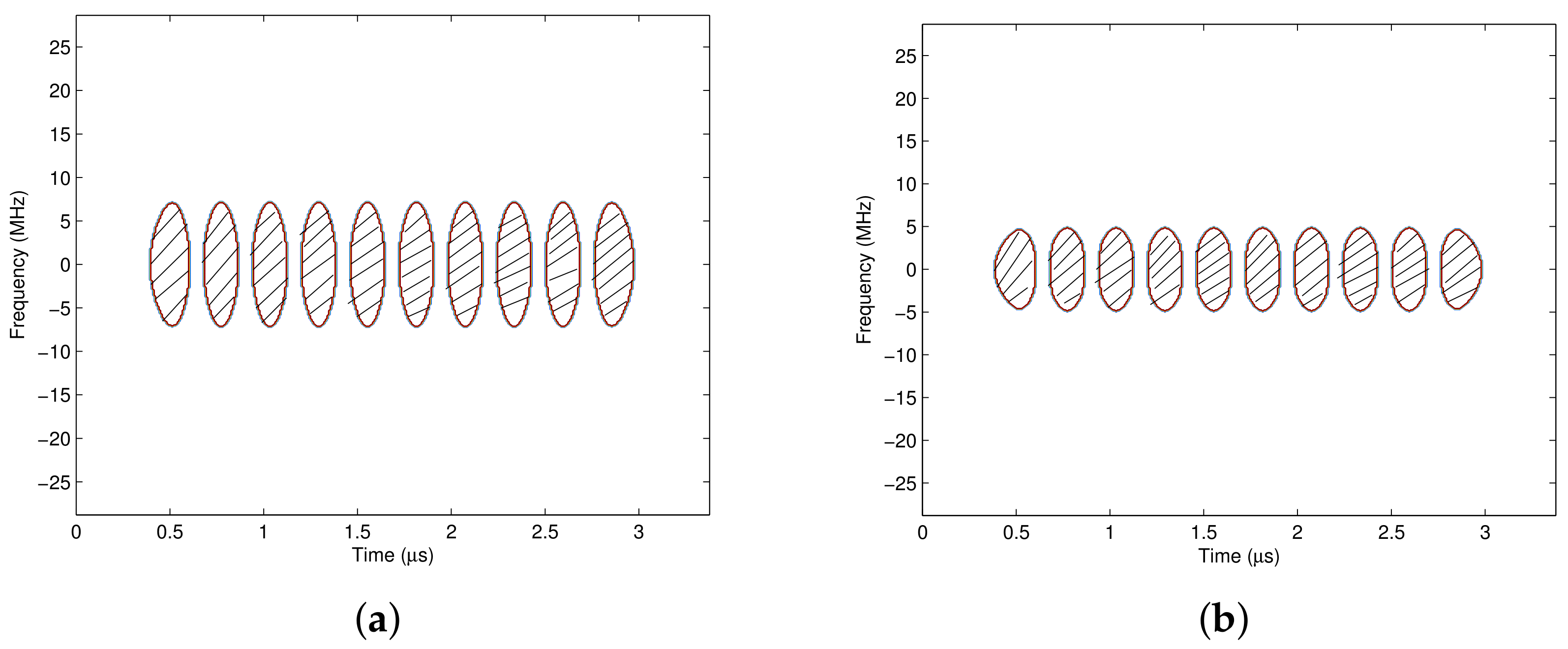
4.2. Pass Region with Different Time Frequency Analysis Windows
5. Time Frequency Distribution Based Co-Channel Interference Suppression
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| 4-QAM | 4th order Quadrature Amplitude Modulation |
| BER | Bit Error Rate |
| BPSK | Binary Phase Shift Keying |
| BT | Bandwidth Time product |
| CWD | Choi-Williams Distribution |
| D2D | Device-to-Device communications |
| Bit energy to noise spectral density ratio | |
| GNSS | Global Navigation Satellite System |
| GWS | General Weyl Synbol |
| LPF | Low Pass Filter |
| LTV | Linear Time Varying |
| M-QAM | Mth order Quadrature Amplitude Modulation |
| QPSK | Quadrature Phase Shift Keying |
| SC-FDMA | Single Carrier-Frequency Division Multiple Access |
| SIR | Signal to Interference Ratio |
| SINR | Signal to Interference and Noise Ratio |
| SNR | Signal to Noise Ratio |
| STFT | Short Time Fourier Transform |
| WVD | Wigner-Ville Distribution |
References
- Lu, W.D.; Gong, Y.; Liu, X.; Wu, J.; Peng, H. Collaborative Energy and Information Transfer in Green Wireless Sensor Networks for Smart Cities. IEEE Trans. Ind. Inf. 2018, 14, 1585–1593. [Google Scholar] [CrossRef]
- Yin, R.; Yu, G.; Maaref, A.; Li, G.Y. A Framework for Co-Channel Interference and Collision Probability Tradeoff in LTE Licensed-Assisted Access Networks. IEEE Trans. Wirel. Commun. 2016, 15, 6078–6090. [Google Scholar] [CrossRef]
- Mosleh, S.; Ashdown, J.D.; Matyjas, J.D.; Medley, M.J.; Zhang, J.Z.; Liu, L.J. Interference Alignment for Downlink Multi-Cell LTE-Advanced Systems With Limited Feedback. IEEE Trans. Wirel. Commun. 2016, 15, 8107–8121. [Google Scholar] [CrossRef]
- Nunes, I.O.; Celes, C.; Nunes, I.; Vaz de Melo, P.O.S.; Loureiro, A.A.F. Combining Spatial and Social Awareness in D2D Opportunistic Routing. IEEE Commun. Mag. 2018, 1, 128–135. [Google Scholar] [CrossRef]
- Whitelonis, N.; Ling, H. Radar Signature Analysis Using a Joint Time-Frequency Distribution Based on Compressed Sensing. IEEE Trans. Antennas Propag. 2014, 62, 755–763. [Google Scholar] [CrossRef]
- Wang, P.; Cetin, E.; Dempster, A.G.; Wang, Y.; Wu, S. GNSS Interference Detection Using Statistical Analysis in the Time-Frequency Domain. IEEE Trans. Aerosp. Electron. Syst. 2017. [Google Scholar] [CrossRef]
- Amin, M.G.; Borio, D.; Zhang, Y.D.; Galleani, L. Time-Frequency Analysis for GNSSs From interference mitigation to system monitoring. IEEE Signal Proc. Mag. 2017, 85–95. [Google Scholar] [CrossRef]
- Sun, K.W.; Jin, T.; Yang, D.K. An Improved Time-Frequency Analysis Method in Interference Detection for GNSS Receivers. Sensors 2015, 15, 9404–9426. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.Y.; Jiang, Y.C. Real-time Parameter Estimation for SAR Moving Target based on WVD Slice and FrFT. Electron. Lett. 2018, 54, 47–49. [Google Scholar] [CrossRef]
- Ouelha, S.; Bey, A.A.S.E.; Boashash, B. Improving DOA Estimation Algorithms Using High-Resolution Quadratic Time-Frequency Distributions. IEEE Trans. Signal Process. 2017, 65, 5179–5190. [Google Scholar] [CrossRef]
- Zhang, M.; Liu, L.T.; Diao, M. LPI Radar Waveform Recognition Based on Time-Frequency Distribution. Sensors 2016, 16, 1682. [Google Scholar] [CrossRef] [PubMed]
- Cohen, L. Time Frequency Distribution—A Review. Proc. IEEE 1989, 77, 941–981. [Google Scholar] [CrossRef]
- Boashash, B. Linear Time Varying Filter. In Time Frequency Signal Analysis and Processing—A Comprehensive Reference; Elsevier: New York, NY, USA, 2003; pp. 472–473. [Google Scholar]
- Lee, H.; Bien, Z. Bandpass Variable-bandwidth Filter for Reconstruction of Signals with Known Boundary in Time-frequency Domain. IEEE Signal Proc. Lett. 2004, 11, 160–163. [Google Scholar] [CrossRef]
- Gerald, M.; Franz, H. Time-frequency Projection Filters: Online Implementation, Subspace Tracking, and Application to Interference Excision. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Orlando, FL, USA, 13–17 May 2002. [Google Scholar]
- Ivanovic, Y.; Jovanovski, S.; Radovic, N. Superior Execution Time Design of Optimal Wiener Time-frequency Filter. Electron. Lett. 2016, 52, 1440–1442. [Google Scholar] [CrossRef]
- Wang, Y.; Veluvolu, K.C. Time-frequency Decomposition of Band-limited Signals with BMFLC and Kalman Filter. In Proceedings of the 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012; pp. 582–587. [Google Scholar]
- Rout, N.K.; Das, D.P.; Panda, G. Particle Swarm Optimization Based Active Noise Control Algorithm without Secondary Path Identification. IEEE Trans. Instrum. Meas. 2012, 61, 554–563. [Google Scholar] [CrossRef]
- Chang, C.Y.; Chen, D.R. Active Noise Cancellation Without Secondary Path Identification by Using an Adaptive Genetic Algorithm. IEEE Trans. Instrum. Meas. 2010, 59, 2315–2327. [Google Scholar] [CrossRef]
- Karaboga, N.; Cetinkaya, B. A Novel and Efficient Algorithm for Adaptive Filtering: Artificial Bee Colony Algorithm. Turk. J. Elec. Eng. Comput. Sci. 2011, 19, 175–190. [Google Scholar]
- Quadri, A.; Manesh, M.R.; Kaabouch, N. Denoising Signals in Cognitive Radio Systems using an Evolutionary Algorithm based Adaptive Filter. In Proceedings of the 2016 IEEE 7th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 20–22 October 2016; pp. 1–6. [Google Scholar]
- Quadri, A.; Manesh, M.R.; Kaabouch, N. Noise Cancellation in Cognitive Radio Systems: A Performance Comparison of Evolutionary Algorithms. In Proceedings of the IEEE 7th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 9–11 January 2017; pp. 1–7. [Google Scholar]
- Schimmel, M.; Gallart, J. The Inverse S-transform in Filters with Time-frequency Localization. IEEE Trans. Signal Process. 2005, 53, 4417–4422. [Google Scholar] [CrossRef]
- Yin, B.; He, Y.; Li, B. An Adaptive SVD Method for Solving the Pass-region Problem in S-transform Time-frequency Filters. Chin. J. Electron. 2015, 24, 115–123. [Google Scholar] [CrossRef]
- Wang, D.; Wang, J.; Liu, Y. An Adaptive Time-frequency Filtering Algorithm for Multi-component LFM Signals Based on Generalized S-transform. In Proceedings of the 21st International Conference on Automation and Computing (ICAC), Grenobe, France, 7–10 July 2015; pp. 1–6. [Google Scholar]
- Lee, H.; Bien, Z. Linear Time-varying Filter with Variable Bandwidth. In Proceedings of the IEEE International Symposium on Circuits and Systems, Island of Kos, Greece, 21–24 May 2006; pp. 2493–2496. [Google Scholar]
- Lee, H.; Bien, Z. A Variable Bandwidth Filter for Estimation of Instantaneous Frequency and Reconstruction of Signals with Time-varying Spectral Content. IEEE Trans. Signal Process. 2011, 59, 2052–2071. [Google Scholar] [CrossRef]
- Hlawatsch, F.; Kozek, W. Time-frequency Projection Filters and Time-frequency Signal Expansions. IEEE Trans. Signal Process. 1994, 42, 3321–3334. [Google Scholar] [CrossRef]
- Hlawatsch, F.; Matz, G.; Kirchauer, H. Time-frequency Formulation, Design, and Implementation of Time-varying Optimal Filters for Signal Estimation. IEEE Trans. Signal Process. 2000, 48, 1417–1432. [Google Scholar] [CrossRef]
- Yang, B. A Study of Inverse Short-time Fourier Transform. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Las Vegas, NV, USA, 30 March–4 April 2008; pp. 3541–3544. [Google Scholar]
- Gabor, D. Theory of Communication. J. Inst. Electr. Eng. 1946, 93, 429–457. [Google Scholar] [CrossRef]
- Choi, H.I.; Williams, W.J. Improved Time-frequency Representation of Multicomponent Signals Using Exponential Kernels. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 862–871. [Google Scholar] [CrossRef]
- Tan, R.; Lim, H.S.; Smits, A.B.; Harmanny, R.I.A.; Cifola, L. Improved Micro-Doppler Features Extraction using Smoothed-Pseudo Wigner-Ville Distribution. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 730–733. [Google Scholar]
- Li, Y.; Sha, X.J.; Ye, L.; Fang, X.J. Time-frequency Analysis and Filtering for Pulse Shaping Signals. Inf. Technol. J. 2016, 15, 91–98. [Google Scholar] [CrossRef]
- Li, Y.; Sha, X.J.; Ye, L. An SC-FDMA Inter-cell Interference Suppression Method Based on a Time-varying Filter. In Proceedings of the IEEE International Conference on Computer Communications (INFOCOM) on 5G Workshops, San Francisco, CA, USA, 10–15 April 2016; pp. 909–914. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Pulse shaping filter | raised cosine roll-off filter |
| Raised cosine roll-off factor | 0.22 |
| Modulation type | 4-QAM |
| Symbol time period | 0.26042 s |
| Truncated length of Raised cosine pulse | |
| Center frequency of the first signal | 11.52 MHz |
| Center frequency of the second signal | 21.52 MHz |
| Analysis window type | Hamming |
| Analysis window length | |
| for Choi-Williams distribution | 1 |
| Parameters | Values |
|---|---|
| Gaussian pulse parameter BT | 0.4 |
| Truncated length of the Gaussian pulse | |
| Center frequency of the expected signal | 800 MHz |
| Center frequency of the interference signals | 800 MHz |
| Symbol time period | 0.26042 s |
| Parameters | LTV Filter | LPF Filter |
|---|---|---|
| BER performance when = 10 dB, SIR = 4 dB | ||
| Complexity | O() | O(N) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Ye, L.; Sha, X. Time-Frequency Energy Sensing of Communication Signals and Its Application in Co-Channel Interference Suppression. Sensors 2018, 18, 2378. https://doi.org/10.3390/s18072378
Li Y, Ye L, Sha X. Time-Frequency Energy Sensing of Communication Signals and Its Application in Co-Channel Interference Suppression. Sensors. 2018; 18(7):2378. https://doi.org/10.3390/s18072378
Chicago/Turabian StyleLi, Yue, Liang Ye, and Xuejun Sha. 2018. "Time-Frequency Energy Sensing of Communication Signals and Its Application in Co-Channel Interference Suppression" Sensors 18, no. 7: 2378. https://doi.org/10.3390/s18072378
APA StyleLi, Y., Ye, L., & Sha, X. (2018). Time-Frequency Energy Sensing of Communication Signals and Its Application in Co-Channel Interference Suppression. Sensors, 18(7), 2378. https://doi.org/10.3390/s18072378