Position Estimation and Compensation Based on a Two-Step Extended Sliding-Mode Observer for a MSFESS


Abstract
:1. Introduction
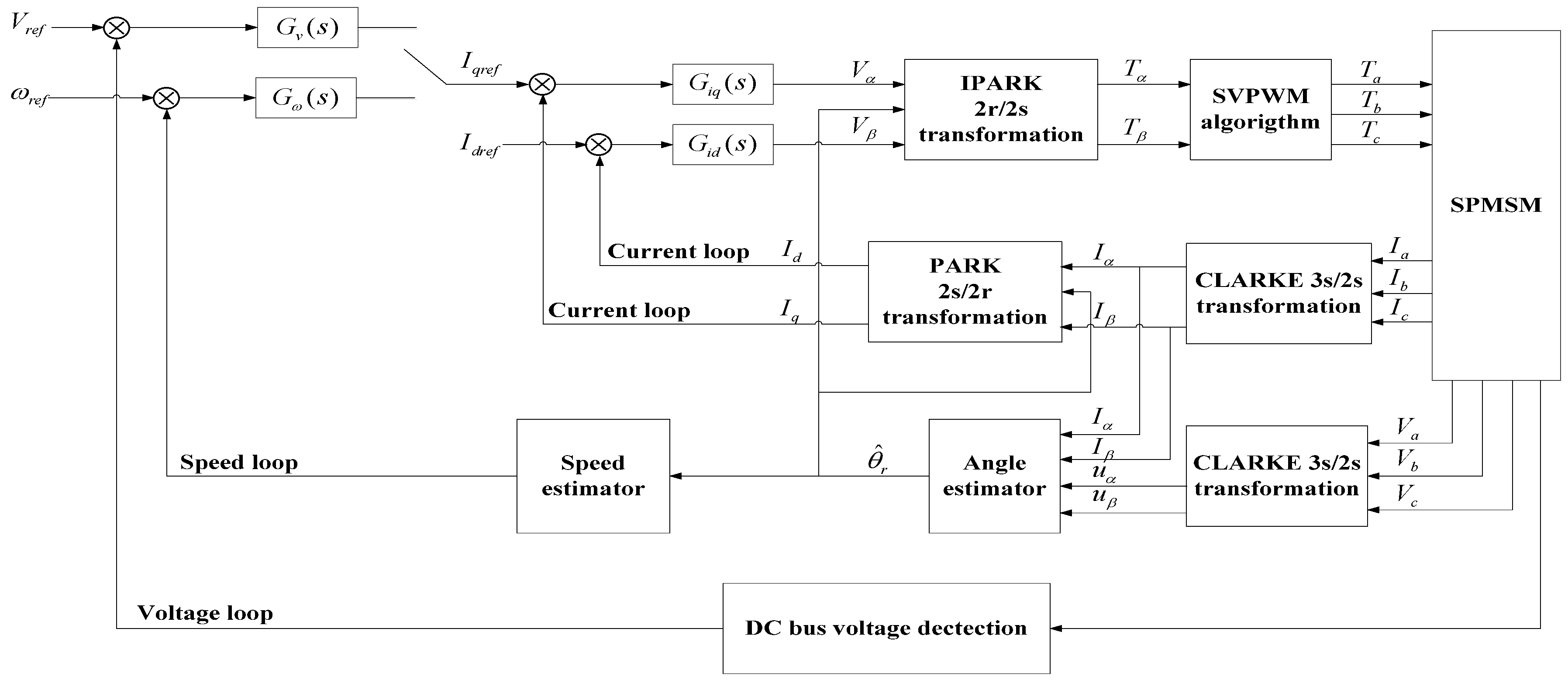
2. System Modeling and Description
3. Basic Idea of This Work
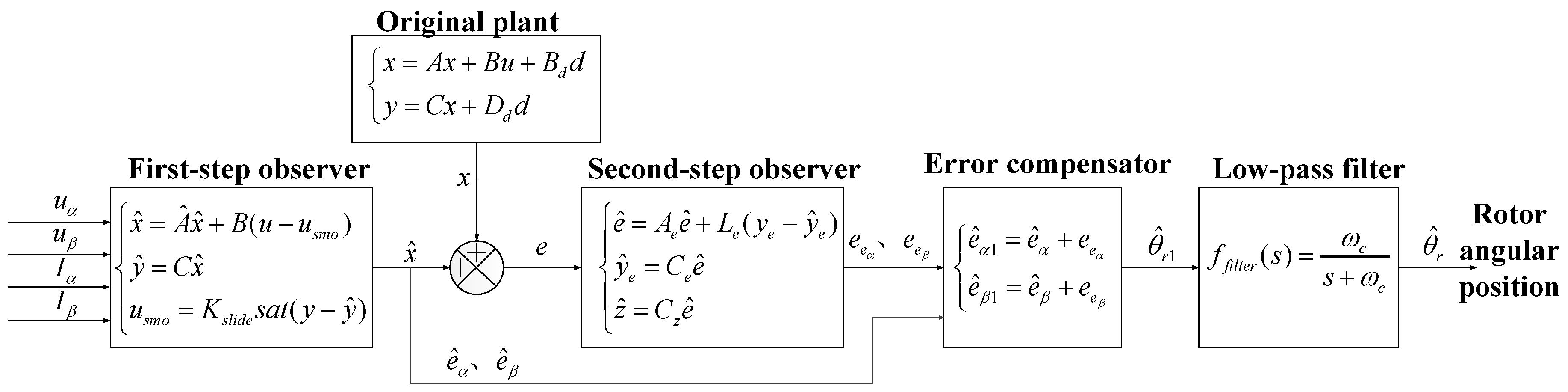
4. Design of Sensorless Estimation System
4.1. H∞ Optimization-Based Sensorless Estimation
4.2. Back Electromotive Force Error Compensation
| Algorithm 1. Given the original system (5) and a sampling period Ts, set computational number and initial time . The observer gain matrix and have been calculated based on formulation (14) and Lemma 1. |
| Step 1. Sample the Hall sensor to refresh the measurements . Step 2. Substitute into (2) to calculate the parameters in the α/β coordinate. Step 3. Put into (6) to calculate the estimation parameters . Step 4. Substitute into (15) to calculate the error estimation parameters . Step 5. Combine into (19) to obtain the error compensation parameters . Step 6. Design the low-pass filter in (22) to compensate the error compensation parameters to accomplish the position estimation and compensation according to (24). |
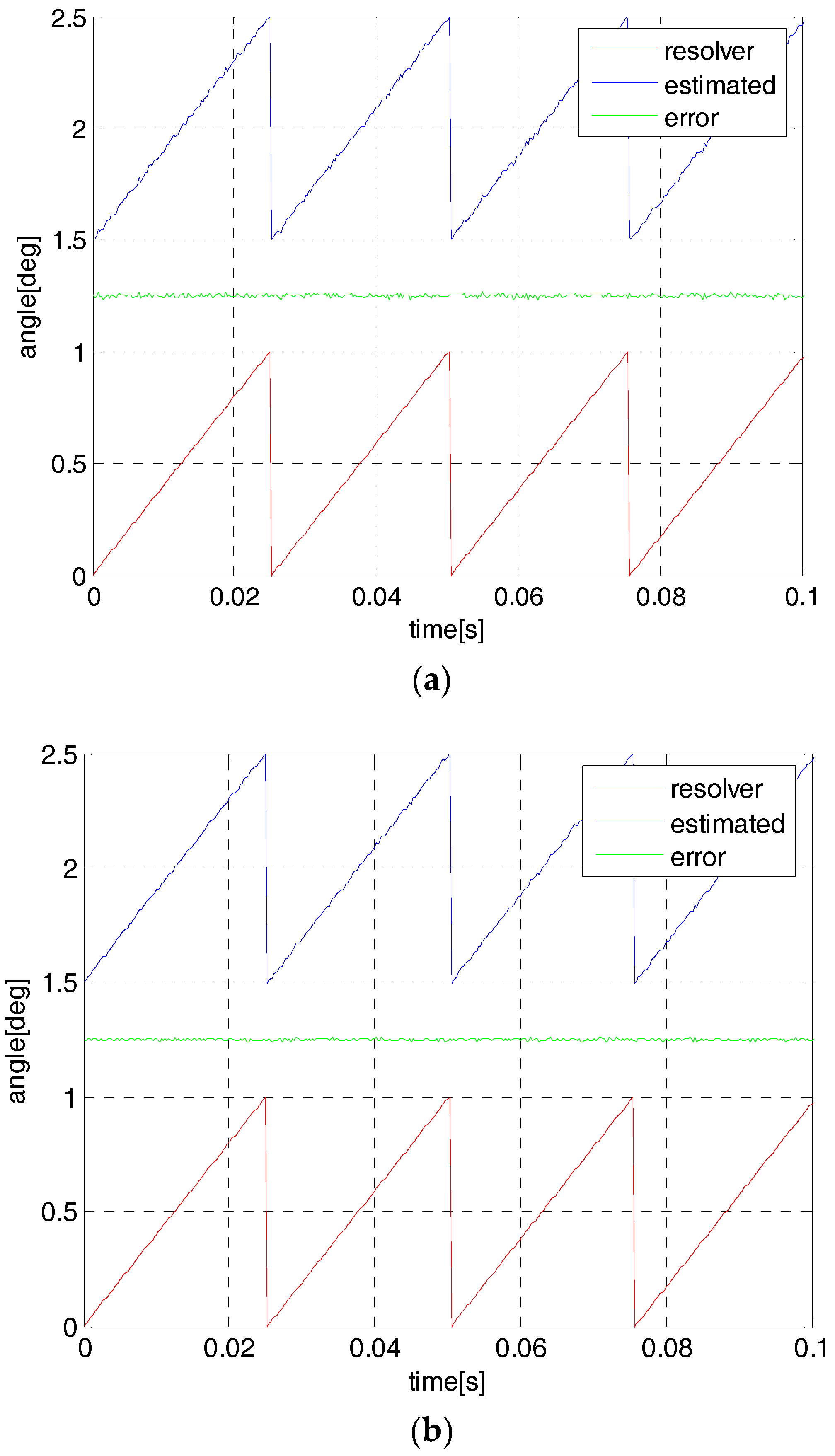
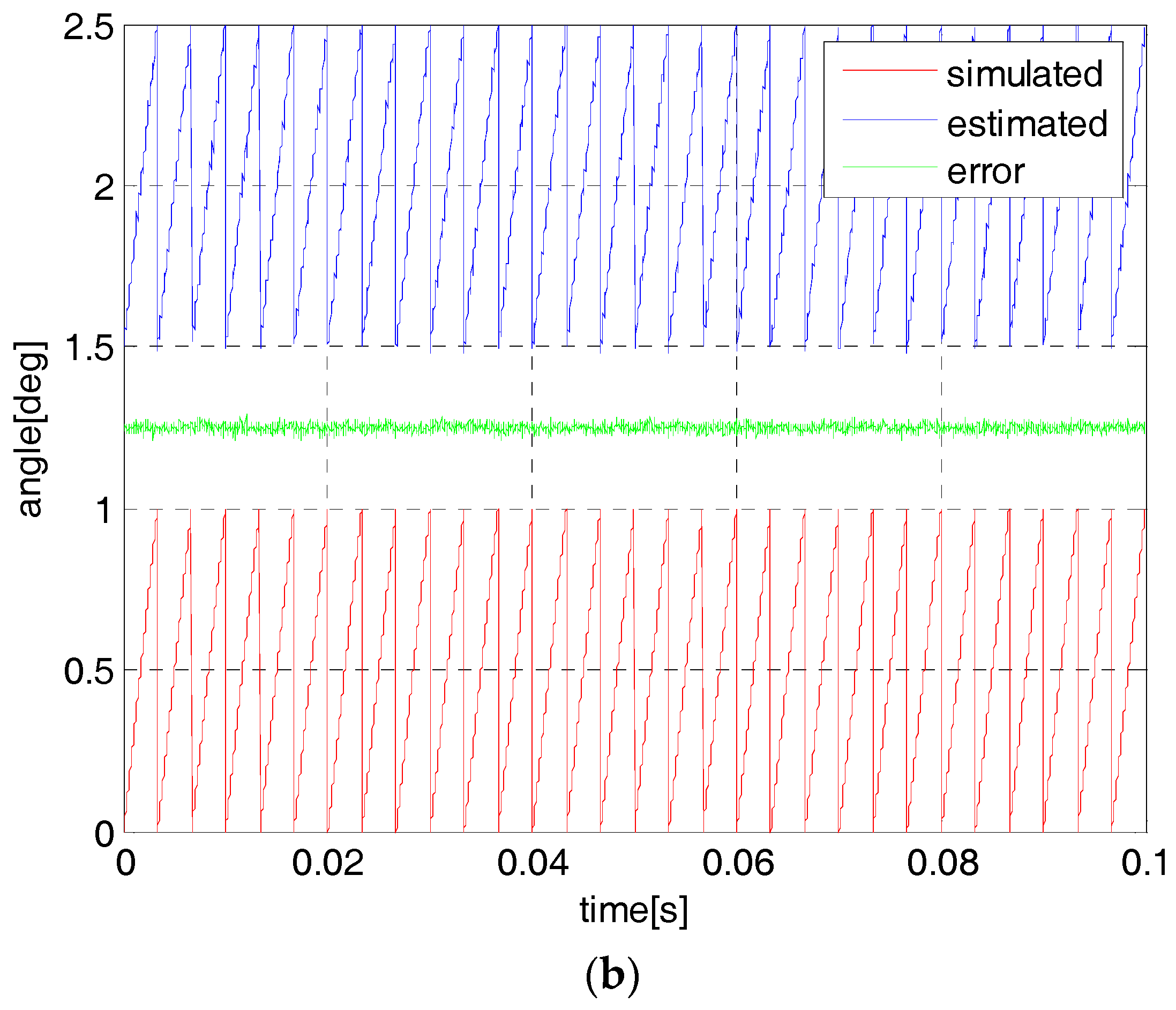
5. Experimental Results
5.1. Experimental Setup
5.2. Angular Position Estimation Results
5.3. Control Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dai, X.J.; Deng, Z.F.; Liu, G. Review on advanced flywheel energy storage system with large scale. Trans. China Electrotech. Soc. 2011, 26, 133–140. [Google Scholar]
- Wang, C.D. Development of flywheel battery. Power Technol. 2014, 37, 732–745. [Google Scholar]
- Chen, Y.; Gann, S.; Zhou, J. Flywheel energy storage technology. Power Technol. 2016, 40, 1718–1721. [Google Scholar]
- Li, S.S.; Fu, Y.Y.; Liu, P.; Wang, Z.Q. Research on Integrated Application and Charging-discharging Control Method for the Magnetically Suspended Flywheel Storage-based UPS System. Proc. CSEE 2017, 37, 170–176. [Google Scholar]
- Li, S.S.; Liu, P.; Fu, Y.Y. Research on problem of the transient charging-discharging switching for the magnetically suspended flywheel-based PMSM system. Small Spec. Electr. Mach. 2018, accepted. [Google Scholar]
- Silva-Saravia, H.; Pulgar-Painemal, H.; Mauricio, J.M. Flywheel energy storage model, control and location for improving stability: The Chilean case. IEEE Trans. Power Syst. 2017, 32, 3111–3119. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, J.Q. A robust flywheel energy storage system discharge strategy for wide speed range operation. IEEE Trans. Ind. Electron. 2017, 64, 7862–7873. [Google Scholar] [CrossRef]
- Müller, T.; See, C.; Ghani, A.; Bati, A.; Thiemann, P. Direct flux control—Sensorless control method of PMSM for all speeds—Basics and constraints. Electron. Lett. 2017, 53, 1110–1111. [Google Scholar] [CrossRef]
- Paitandi, S.; Sengupta, M. Analysis, design and implementation of sensorless V/f control in a surface-mounted PMSM without damper winding. Sadhana Acad. Proc. Eng. Sci. 2017, 42, 1317–1333. [Google Scholar] [CrossRef]
- Chaoui, H.; Okoye, O.; Khayamy, M. Current sensorless MTPA for IPMSM drives. IEEE-ASME Trans. Mechatron. 2017, 22, 1585–1593. [Google Scholar] [CrossRef]
- Almarhoon, A.H.; Zhu, Z.Q.; Xu, P.L. Improved pulsating signal injection using zero-sequence carrier voltage for sensorless control of dual three-phase PMSM. IEEE Trans. Energy Convers. 2017, 32, 436–446. [Google Scholar] [CrossRef]
- Ni, R.; Xu, D.; Blaabjerg, F.; Lu, K.; Wang, G.; Zhang, G. Square-wave voltage injection algorithm for PMSM position sensorless control with high robustness to voltage errors. IEEE Trans. Power Electron. 2017, 32, 5425–5437. [Google Scholar] [CrossRef]
- Tian, L.S.; Yu, Q. Wide-speed-range sensorless control scheme for IPMSMs based on super-twisting observer and HF signal injection. Int. J. Appl. Electromagn. Mech. 2017, 54, 367–387. [Google Scholar] [CrossRef]
- Urbanski, K. A new sensorless speed control structure for PMSM using reference model. Bull. Pol. Acad. Sci. Tech. Sci. 2017, 65, 489–496. [Google Scholar] [CrossRef] [Green Version]
- Jung, T.U.; Jang, J.H.; Park, C.S. A back-EMF estimation error compensation method for accurate rotor position estimation of surface mounted permanent magnet synchronous motors. Energies 2017, 10, 1160. [Google Scholar] [CrossRef]
- Feng, G.D.; Lai, C.Y.; Kar, N.C. Expectation-maximization particle-filer-and Kalman-filter-based permanent magnet temperature estimation for PMSM condition monitoring using high-frequency signal injection. IEEE Trans. Ind. Inform. 2017, 13, 261–1270. [Google Scholar]
- Chang, X.J.; Liu, L.; Ding, W. Novel nonsingular fast terminal sliding mode control for a PMSM chaotic system with extended state observer and tracking differentiator. J. Vib. Control 2017, 23, 2478–2493. [Google Scholar] [CrossRef]
- Liang, D.L.; Li, J.; Qu, R.H. Sensorless control of permanent magnet synchronous machine based on second-order sliding-mode observer with online resistance estimation. IEEE Trans. Ind. Appl. 2017, 53, 3672–3682. [Google Scholar] [CrossRef]
- Sheng, L.C.; Li, W. Sensorless control of a shearer shor-range cutting interior permanent magnet synchronous motor based on a new sliding mode observer. IEEE Access 2017, 5, 18439–18450. [Google Scholar] [CrossRef]
- Bariša, T.; Sumina, D.; Pravica, L.; Čolović, I. Flying start and sensorless control of permanent magnet wind power generator using induced voltage measurement and phase-locked loop. Electr. Power Syst. Res. 2017, 152, 457–465. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L. Network-based H∞ filtering using a logic jumping-like trigger. Automatica 2013, 49, 1428–1435. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L.; Yu, X.H. Survey on Recent Advances in Networked Control Systems. IEEE Trans. Ind. Inform. 2016, 12, 1740–1752. [Google Scholar] [CrossRef]
- Zhong, M.Y.; Li, S.S. Robust optimal Hi/H∞ fault detection and its applications in a TGSCM system. Trans. Inst. Meas. Control 2018, 40, 719–732. [Google Scholar] [CrossRef]
- Li, S.S.; Fu, Y.Y.; Liu, P. Research on disturbance analysis and detection method for the magnetically suspended flywheel-based PMSM system. Energy Storage Sci. Technol. 2018, 7. [Google Scholar] [CrossRef]
- Zhang, B.L.; Han, Q.L.; Zhang, X.M. Recent advances in vibration control of offshore platforms. Nonlinear Dyn. 2017, 89, 755–771. [Google Scholar] [CrossRef]
- Zhang, B.L.; Han, Q.L.; Zhang, X.M.; Yu, X. Sliding mode control with mixed current and delayed states for offshore steel jacket platforms. IEEE Trans. Control. Syst. Technol. 2014, 22, 1769–1783. [Google Scholar] [CrossRef]
- Mohamed, G.; Sofiane, A.A.; Nicolas, L. Adaptive super twisting extended state observer based sliding mode control for diesel engine air path subject to matched and unmatched disturbance. Math. Comput. Simul. 2018, 151, 111–130. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Index | Symbol |
|---|---|---|
| Electric capacity | 3 kWh | EN |
| Rated speed | 10,500 rpm | nN |
| Rated power | 250 kVA | PN |
| Rated voltage | 600 V | VN |
| Rated current | 255 A | IN |
| Stator resistance | 0.1 Ω | Rs |
| Stator inductance | 300 μH | Ls |
| Pole-pairs | 2 | p |
| Rotor moment of inertia | 16.2 kg·m2 | JN |
| Bearing type | AMB | - |
| Vacuum value | <10 Pa | - |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Fu, Y.; Liu, P. Position Estimation and Compensation Based on a Two-Step Extended Sliding-Mode Observer for a MSFESS. Sensors 2018, 18, 2467. https://doi.org/10.3390/s18082467
Li S, Fu Y, Liu P. Position Estimation and Compensation Based on a Two-Step Extended Sliding-Mode Observer for a MSFESS. Sensors. 2018; 18(8):2467. https://doi.org/10.3390/s18082467
Chicago/Turabian StyleLi, Shusheng, Yongling Fu, and Ping Liu. 2018. "Position Estimation and Compensation Based on a Two-Step Extended Sliding-Mode Observer for a MSFESS" Sensors 18, no. 8: 2467. https://doi.org/10.3390/s18082467
APA StyleLi, S., Fu, Y., & Liu, P. (2018). Position Estimation and Compensation Based on a Two-Step Extended Sliding-Mode Observer for a MSFESS. Sensors, 18(8), 2467. https://doi.org/10.3390/s18082467