Wireless Positioning in IoT: A Look at Current and Future Trends



Abstract
:1. Introduction
2. Related Work
3. Designing an IoT Positioning System
3.1. Positioning Domains
- Power or signal strength-based;
- Time-based;
- Space-based.
3.1.1. Power Domain
3.1.2. Time Domain
3.1.3. Space Domain
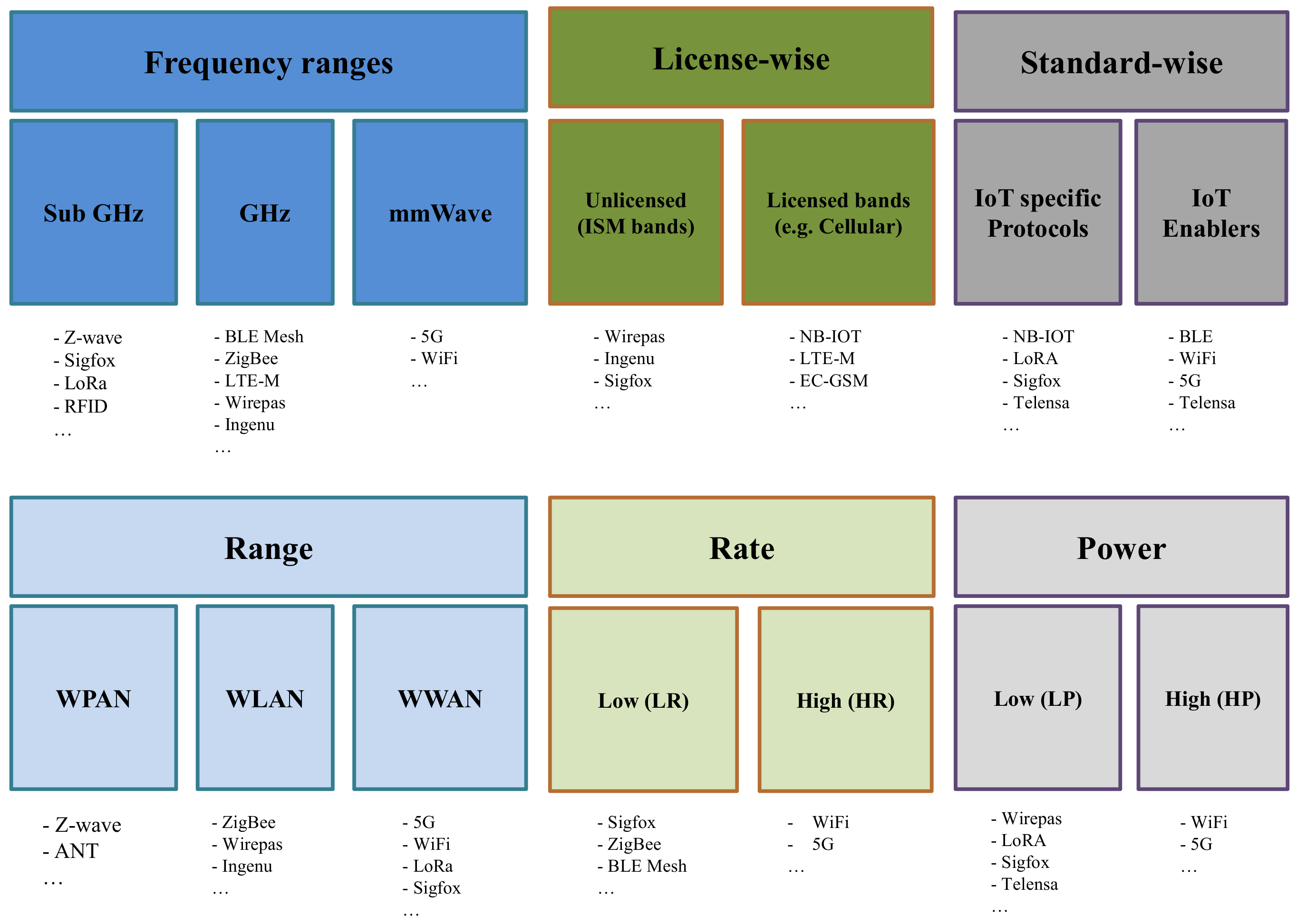
3.2. IoT Classifications
- Licensed versus unlicensed: which refers to the operation in a protected band, such as cellular bands versus operation in unlicensed bands, such as industrial, scientific and medical (ISM) bands;
- Operating frequency bands: which refers to the carrier frequency of each IoT technology; here, we divide the frequency spectrum into three parts: sub-GHz, GHz, and mmWave bands. Some IoT technologies spread over multiple ranges;
- Protocols versus enablers: which refers to whether a technology is seen as a specific IoT communication protocol or a possible wireless positioning enabler;
- Range-based classification: which refers to short-, medium-, or long-range operation;
- Rate-based classification: which refers to Low-Rate (LR) or High-Rate (HR) data rates. Typically, most IoT connectivity solutions are meant for LR high delay applications, while solutions such as WiFi and 5G cover HR and low latency applications;
- Power-based classification: which refers to Low-Power (LP) versus High-Power (HP) operation. Typically, LP approaches go hand in hand with LR approaches, while HP approaches go hand in hand with HP approaches. In LP operation, the devices can function for several years on batteries.
3.3. IoT System Parameters
- Topology relates to a message passing from one node to another and the possibility to discover new nodes in the network. The network topology, illustrated in Figure 5, has a significant impact on how nodes with known locations are discovered by others. On a mesh topology, any node can be set as a reference node, whereas, on a star topology, only the access nodes can be defined as such. The density of the fixed nodes also plays an important role in the location accuracy. For example, a denser network with a well-spread distribution of nodes is likely to provide a better location accuracy than a network with few reference nodes all placed in the same direction from the device to be located. An IoT network typically has a star or mesh topology. In a star topology, devices can only talk to their parent device, while, in a mesh topology, nodes can exchange messages between each other. Star topologies are susceptible to single points of failure, since losing the connection to the parent means that the node will be outside the network. In a mesh topology, if a link fault occurs, the device can look for any other neighbor to connect to. Thus, mesh networks provide better coverage and, implicitly, they are likely to offer better positioning accuracy than star networks;
- Range of an IoT system is important in the sense that it defines an upper bound of the positioning error, which cannot be larger than the communication range. In this aspect, mesh-capable networks have a better footing for positioning purposes as any device can extend service without the need to have specific and dedicated infrastructure;
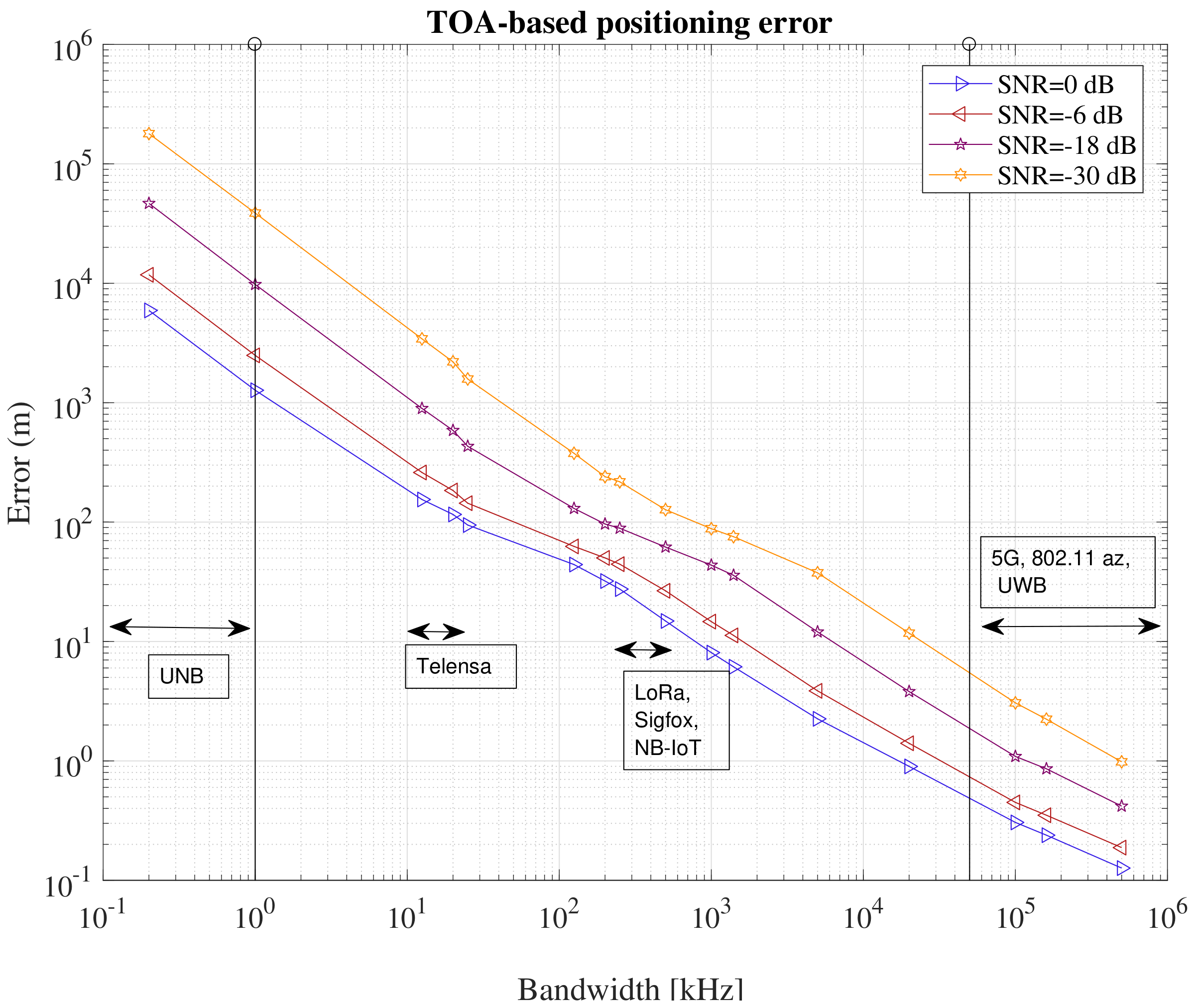
- Channel bandwidth is directly related to the achievable accuracy in positioning when a TOA-based estimation is used. The Crámer–Rao lower bound for any unbiased estimator [12] of a time delay of a signal S is given aswhere is the signal energy, the noise spectral density and is the mean square bandwidth of the signal. However, since we have do not have all the necessary information to accurately determine each IoT signal’s spectrum density, we provide instead the multipath resolution or time-frequency resolution defined as follows:Equation (7) determines how the time duration and the spectral bandwidth relate to each other. The spectral bandwidth is defined as the bandwidth that includes most of the signal’s energy. In this study, we assume it to be equal to the channel bandwidth. Overall, what both Equations (6) and (7) show is that, for time-based approaches, it is favorable to have signals with high SNR and short time duration (i.e., higher bandwidth);
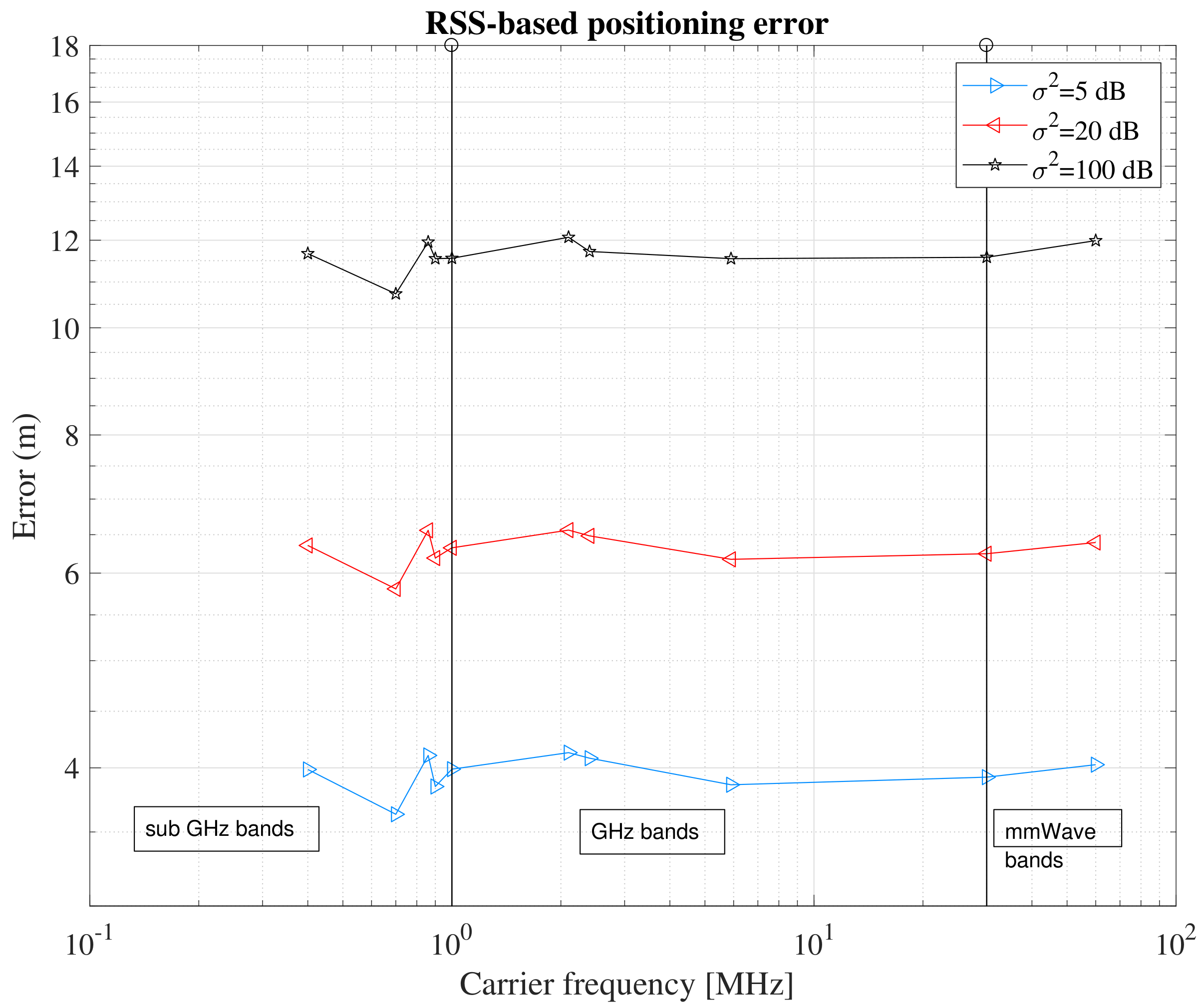
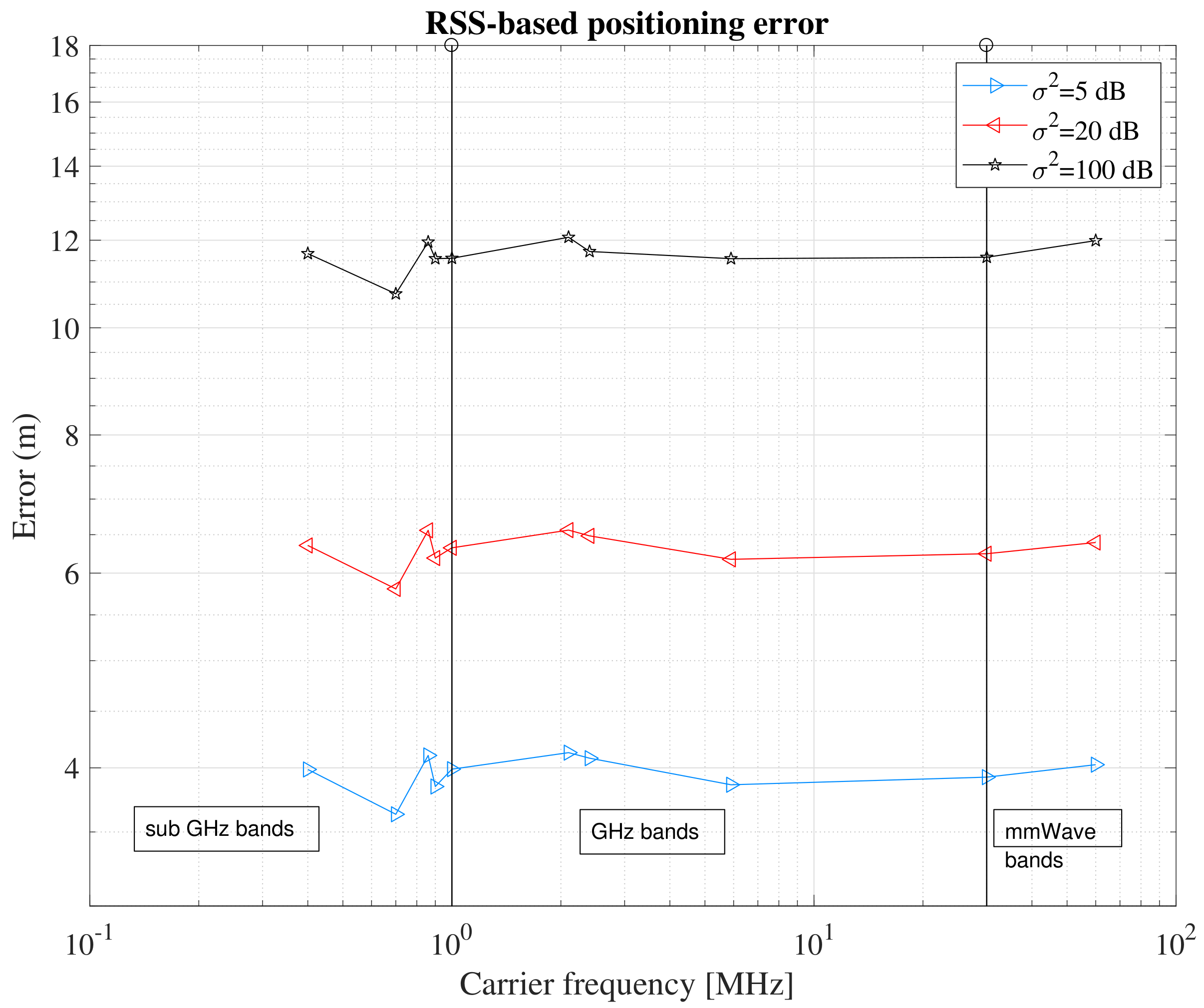
- Carrier frequency is inversely proportional to the signal wavelength and to the path losses exhibited by the signal. As we move from sub-GHz carriers towards mmWave carriers, the path losses are stronger and stronger, which results in smaller communication ranges. The differences in path losses are due to a multitude of phenomena, but, as frequency increases, they are especially due to the smaller effective area of the devices’ antennae. Overall, combining lower carrier frequencies and mesh topologies results in an enhanced service coverage;
- Modulation types in IoT systems rely on various digital modulation types, from Ultra Narrow Band (UNB), defined as systems with bandwidths below 1 kHz, to Ultra Wide Band (UWB) modulations, i.e., bandwidths above 500 MHz. In addition, spread spectrum (SS) or Orthogonal Frequency Division Multiplexing (OFDM) modulations are also widely encountered. The modulation type plays a big role in the achievable positioning accuracy when TOA, TDOA, or AOA methods are used, but it has little or no impact when RSS methods are used. Certain modulation-based characteristics can be exploited for positioning purposes. For example, this is the case of SS signals (e.g., LoRa, ZigBee, etc.), where the spreading pseudo-random sequence can be used to infer the signal’s travel time in a similar fashion to GNSS;
- Positioning signaling or data exchange is the ability to use either pilot signals or sequences of data packets to provide the location of nearby devices. However, few of the existing IoT technologies support positioning-related signaling, except for most of the cellular IoT technologies (e.g., NB-IoT), which rely on the observed time difference of arrival (OTDOA), introduced in the LTE radio. Apart from the cellular IoT technologies, the future WiFi 802.11az standards also showcase a dedicated data exchange regarding the time-of-flight information to determine the location of its devices;
- Roaming is the ability to provide continuity of service across multiple networks, owned or not by a single entity. As mobility is a keystone of most positioning applications, it is important to take note of this when looking at IoT systems. In this aspect, protocols such as Sigfox or Ingenu are at an advantage, as they operate similarly to cellular systems and they offer service across multi continents. Despite that, even proprietary solutions start to provide open application interface specifications and open guest periods in the radio access, which facilitate the exchange of data across multiple vendors and technologies;
- Network ownership raises security and privacy concerns. Security is becoming a strong requirement in IoT systems, especially as the data access, transport and storage become more and more regulated by international and European bodies [13]. Technologies such as Ingenu and Sigfox own the entirety of the network, meaning that the transportation of data is under their full responsibility. Thus, positioning solutions enabled by such systems will be protected by the system provider, as the infrastructure device’s location will not be known to the user;
- Power consumption is a main topic for all IoT technologies. For positioning applications, low-power consumption is crucial for the viability of several systems, especially when the goal is to continuously track and monitor inexpensive items. For example, low-power consumption is mandatory in several use cases from the logistics and construction sectors.
3.4. Comparing IoT Technologies and IoT Enablers
4. Simulation-Based Performance Metrics
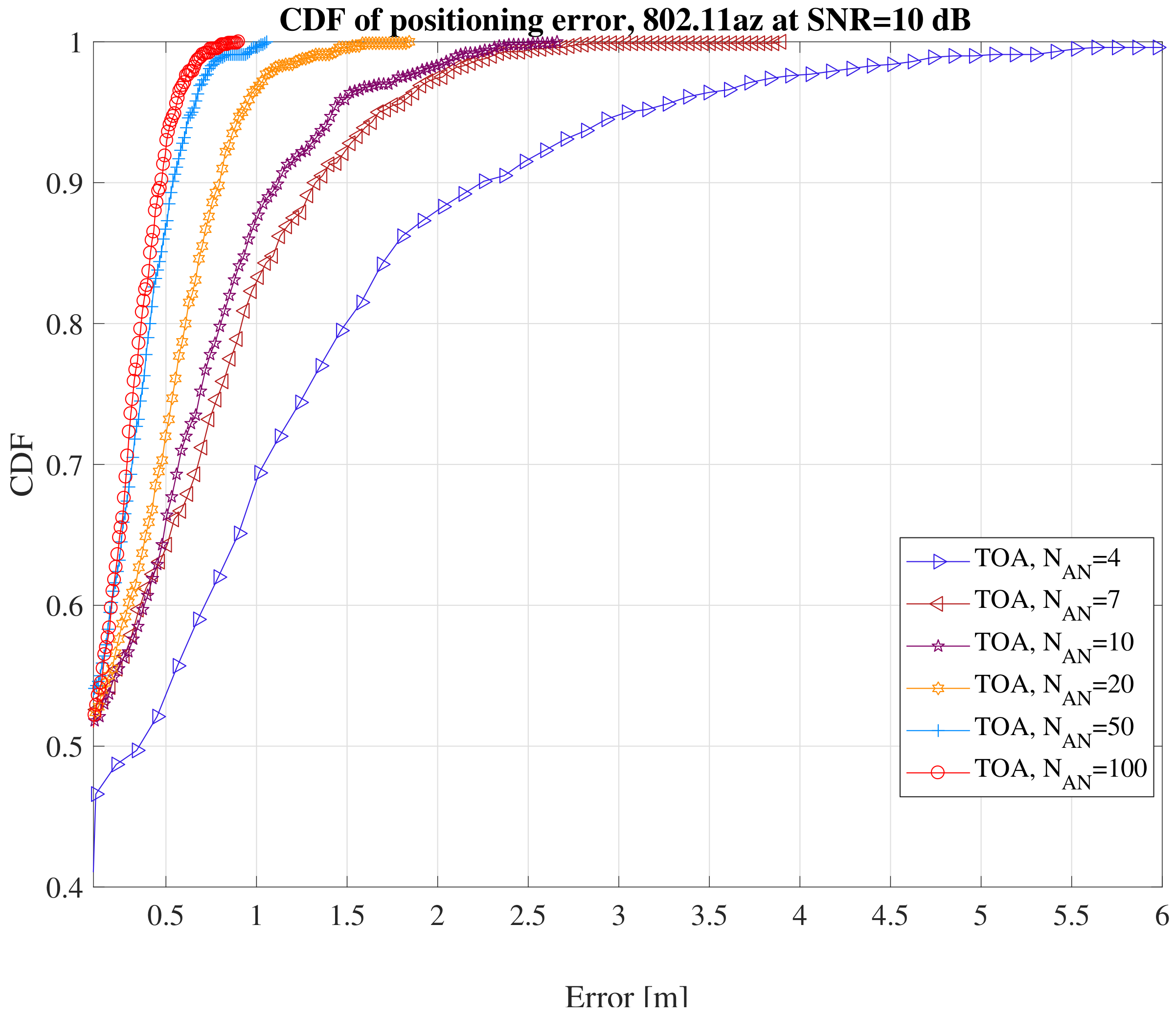
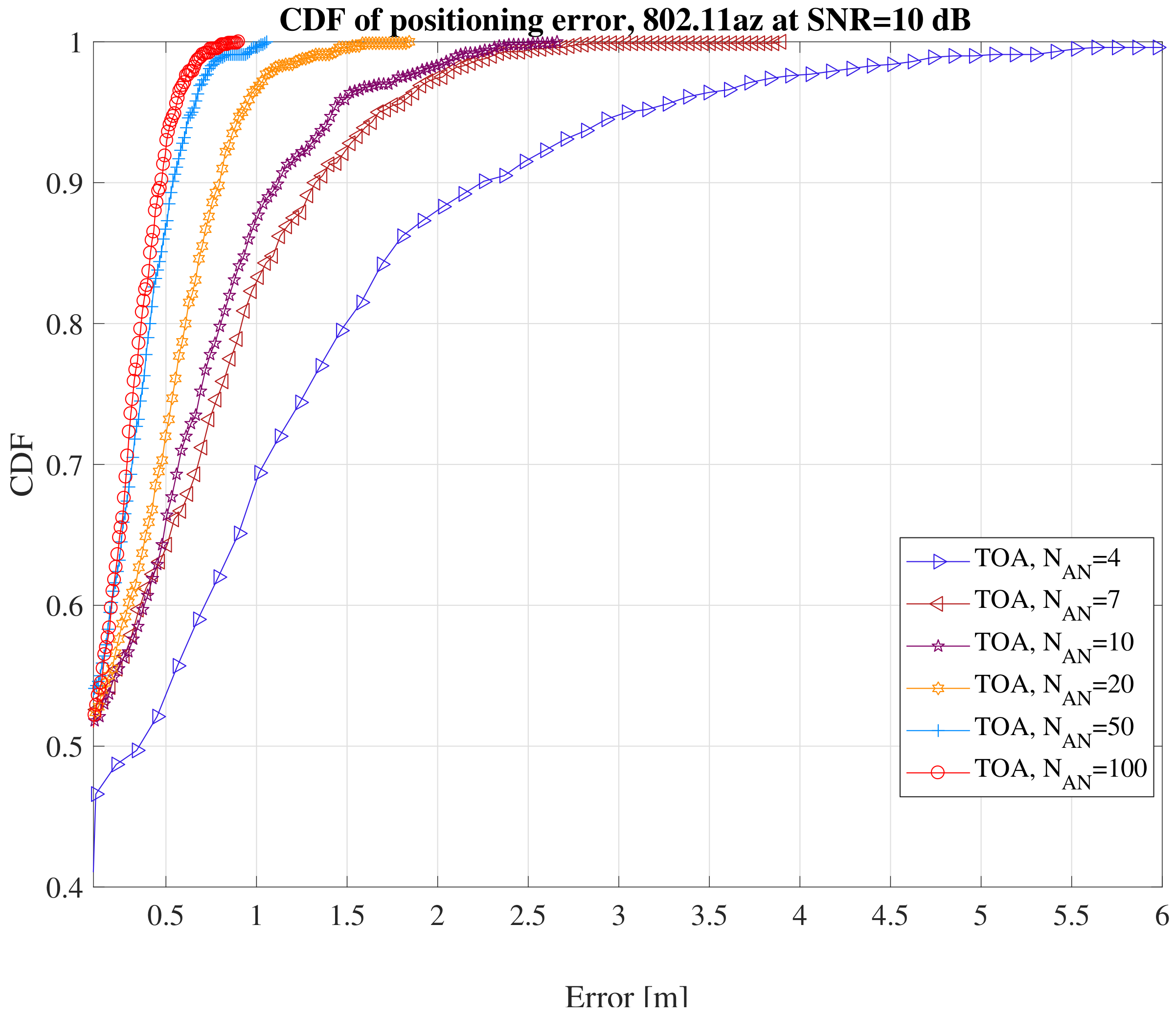
4.1. Case Study 1: 802.11az IoT Enabler, Simulation-Based Results, Time Domain
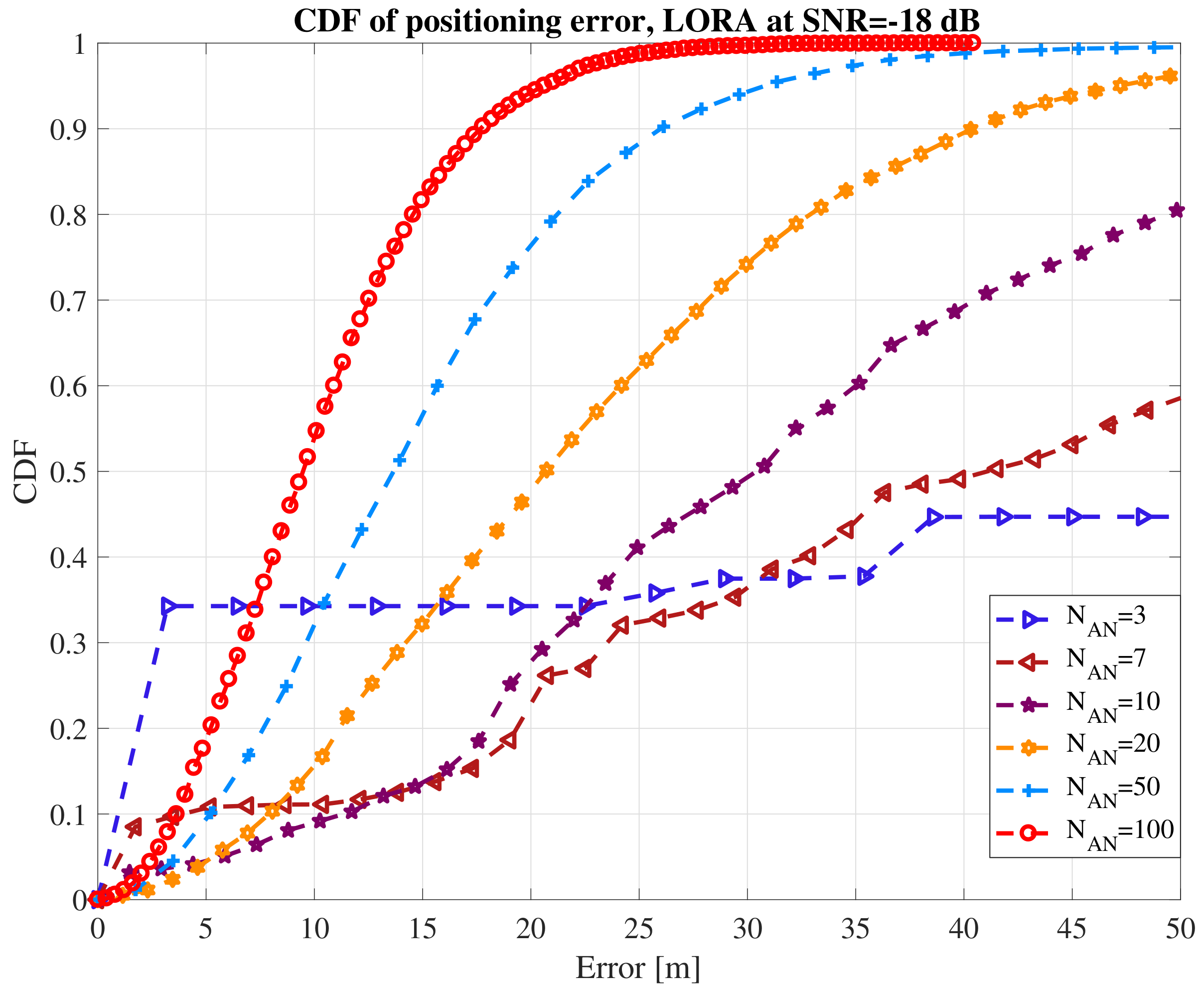
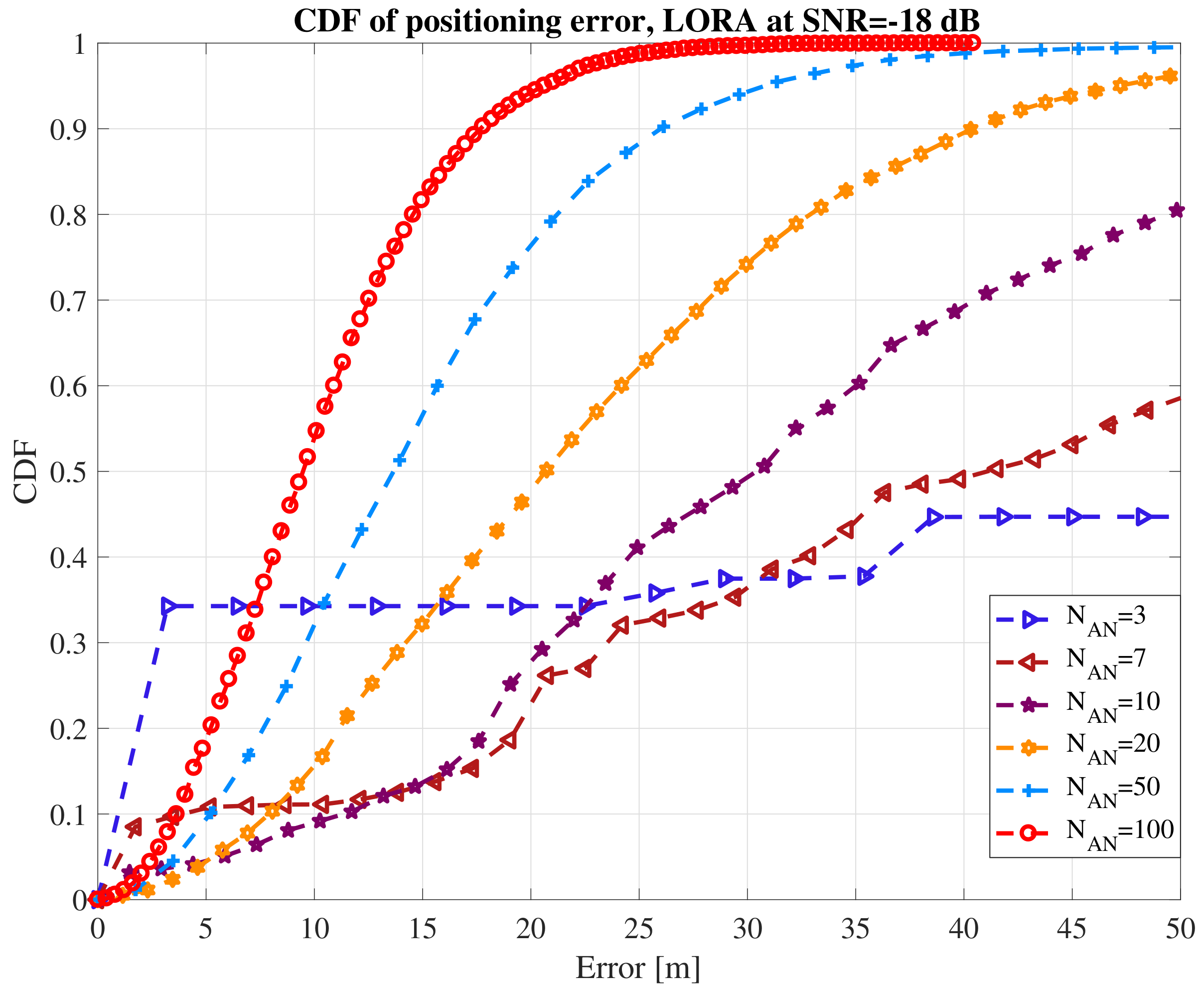
4.2. Case-Study 2: LoRa, Simulation-Based Results, Time Domain
5. Measurement-Based Performance Metrics with Wirepas IoT Platform
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pedersen, T.; Fleury, B.H. Whitepaper on New Localization Methods for 5G Wireless Systems and the Internet-of-Things. COST Action CA15104; Danish National Research Database: Aalborg, Denmark, 2018. [Google Scholar]
- Lin, X.; Bergman, J.; Gunnarsson, F.; Liberg, O.; Razavi, S.M.; Razaghi, H.S.; Rydn, H.; Sui, Y. Positioning for the Internet of Things: A 3GPP Perspective. IEEE Commun. Mag. 2017, 55, 179–185. [Google Scholar] [CrossRef] [Green Version]
- Lin, K.; Chen, M.; Deng, J.; Hassan, M.M.; Fortino, G. Enhanced Fingerprinting and Trajectory Prediction for IoT Localization in Smart Buildings. IEEE Trans. Autom. Sci. Eng. 2016, 13, 1294–1307. [Google Scholar]
- del Peral-Rosado, J.A.; López-Salcedo, J.A.; Seco-Granados, G. Impact of frequency-hopping NB-IoT positioning in 4G and future 5G networks. In Proceedings of the 2017 IEEE International Conference on Communications Workshops (ICC Workshops), Paris, France, 21–25 May 2017; pp. 815–820. [Google Scholar]
- Chen, L.; Thombre, S.; Järvinen, K.; Lohan, E.; Alén-Savikko, A.; Leppäkoski, H.; Bhuiyan, M.; Bu-Pasha, S.; Ferrara, G.; Honkala, S.; et al. Robustness, Security and Privacy in Location-Based Services for Future IoT: A Survey. IEEE Access 2017, 5, 8956–8977. [Google Scholar] [CrossRef]
- Singh, K.; Kapoor, D. Create Your Own Internet of Things: A survey of IoT platforms. IEEE Consum. Electron. Mag. 2017, 6, 57–68. [Google Scholar] [CrossRef]
- Zhang, P.; Nagarajan, S.G.; Nevat, I. Secure Location of Things (SLOT): Mitigating Localization Spoofing Attacks in the Internet of Things. IEEE Internet Things J. 2017, 4, 2199–2206. [Google Scholar] [CrossRef]
- Al-Sarawi, S.; Anbar, M.; Alieyan, K.; Alzubaidi, M. Internet of Things (IoT) communication protocols: Review. In Proceedings of the 2017 8th International Conference on Information Technology (ICIT), Amman, Jordan, 17 May 2017; pp. 685–690. [Google Scholar]
- Raza, U.; Kulkarni, P.; Sooriyabandara, M. Low Power Wide Area Networks: An Overview. IEEE Commun. Surv. Tutor. 2017, 19, 855–873. [Google Scholar] [Green Version]
- Zanella, A. Best Practice in RSS Measurements and Ranging. IEEE Commun. Surv. Tutor. 2016, 18, 2662–2686. [Google Scholar] [CrossRef]
- Lohan, E.S.; Talvitie, J.; e Silva, P.F.; Nurminen, H.; Ali-Löytty, S.; Piché, R. Received signal strength models for WLAN and BLE-based indoor positioning in multi-floor buildings. In Proceedings of the 2015 International Conference on Location and GNSS (ICL-GNSS), Gothenburg, Sweden, 22–24 June 2015; pp. 1–6. [Google Scholar]
- Kay, S. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- European Union. EUR-Lex General Data Protection Regulation; European Union: Brussels, Belgium, 1998–2018. [Google Scholar]
- Koivisto, M.; Costa, M.; Hakkarainen, A.; Leppanen, K.; Valkama, M. Joint 3D Positioning and Network Synchronization in 5G Ultra-Dense Networks Using UKF and EKF. In Proceedings of the 2016 IEEE Globecom Workshops, Washington, DC, USA, 4–8 December 2016; pp. 1–7. [Google Scholar]
- Levanen, T.; Talvitie, J.; Wichman, R.; Syrjälä, V.; Renfors, M.; Valkama, M. Location-aware 5G communications and Doppler compensation for high-speed train networks. In Proceedings of the 2017 European Conference on Networks and Communications (EuCNC), Oulu, Finland, 12–15 June 2017; pp. 1–6. [Google Scholar]
- Faragher, R.; Harle, R. Location Fingerprinting With Bluetooth Low Energy Beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar]
- Davidson, P.; Piché, R. A Survey of Selected Indoor Positioning Methods for Smartphones. IEEE Commun. Surv. Tutor. 2017, 19, 1347–1370. [Google Scholar] [CrossRef]
- Fargas, B.C.; Petersen, M.N. GPS-free geolocation using LoRa in low-power WANs. In Proceedings of the 2017 Global Internet of Things Summit (GIoTS), Geneva, Switzerland, 6–9 June 2017; pp. 1–6. [Google Scholar]
- Basheer, M.R.; Jagannathan, S. Localization of RFID Tags Using Stochastic Tunneling. IEEE Trans. Mob. Comput. 2013, 12, 1225–1235. [Google Scholar] [CrossRef]
- Hasani, M.; Talvitie, J.; Sydänheimo, L.; Lohan, E.S.; Ukkonen, L. Hybrid WLAN-RFID Indoor Localization Solution Utilizing Textile Tag. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 1358–1361. [Google Scholar] [CrossRef]
- Liu, T.; Liu, Y.; Yang, L.; Guo, Y.; Wang, C. BackPos: High Accuracy Backscatter Positioning System. IEEE Trans. Mob. Comput. 2016, 15, 586–598. [Google Scholar]
- Ma, H.; Wang, K. Fusion of RSS and Phase Shift Using the Kalman Filter for RFID Tracking. IEEE Sens. J. 2017, 17, 3551–3558. [Google Scholar] [CrossRef]
- Ma, H.; Wang, Y.; Wang, K.; Ma, Z. The Optimization for Hyperbolic Positioning of UHF Passive RFID Tags. IEEE Trans. Autom. Sci. Eng. 2017, 14, 1590–1600. [Google Scholar] [CrossRef]
- Sallouha, H.; Chiumento, A.; Pollin, S. Localization in long-range ultra narrow band IoT networks using RSSI. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Janssen, T.; Weyn, M.; Berkvens, R. Localization in Low Power Wide Area Networks Using Wi-Fi Fingerprints. Appl. Sci. 2017, 7, 936. [Google Scholar] [CrossRef]
- Cruz, S.B.; Abrudan, T.E.; Xiao, Z.; Trigoni, N.; Barros, J. Neighbor-Aided Localization in Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2693–2702. [Google Scholar] [CrossRef]
- Kalverkamp, G.; Schaffer, B.; Biebl, E. OFDM-Based Ranging Approach for Vehicular Safety Applications. In Proceedings of the 2013 IEEE 78th Vehicular Technology Conference (VTC Fall), Las Vegas, NV, USA, 2–5 September 2013; pp. 1–5. [Google Scholar]
- Ou, C.W.; Chao, C.J.; Chang, F.S.; Wang, S.M.; Liu, G.X.; Wu, M.R.; Cho, K.Y.; Hwang, L.T.; Huan, Y.Y. A ZigBee position technique for indoor localization based on proximity learning. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; pp. 875–880. [Google Scholar]
- Dong, Z.; Mengjiao, C.; Wenjuan, L. Implementation of indoor fingerprint positioning based on ZigBee. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 2654–2659. [Google Scholar]
- Cheon, J.; Hwang, H.; Kim, D.; Jung, Y. IEEE 802.15.4 ZigBee-Based Time-of-Arrival Estimation for Wireless Sensor Networks. Sensors 2016, 16, 203. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Impact on (Battery, Device Cost) per Domain 1 | ||||||||
|---|---|---|---|---|---|---|---|---|
| Technology | Network Topology | Network Type | Time-Based Positioning | Power-Based Positioning | Space-Based Positioning | Achievable Positioning Accuracy 2 | Most Suitable Domain | Accuracy Studies |
| 5G | star | HR/HP-Short range | +, + | +,+ | +,+ | High | Time | [14,15] |
| ANT+ | mesh | LR/LP-Short range | +,+++ | +,+ | ++,++ | Low | Power | |
| BLEmesh | mesh | LR/LP-Short range | +,+++ | +,+ | ++,+ | Medium | Power | [11,16,17] |
| Dash7 | star | LR/LP-Long range | +,+++ | +,+ | ++,++ | Low | Power or Space | |
| EC-GSM-IOT | star | HR/LP-Long range | +,+++ | +,+ | ++,++ | Low | Power | |
| EnOcean | mesh | LR/LP-Long range | +,+++ | +,+ | ++,++ | Low | Power or Space | |
| Ingenu /RPMA | star | LR/LP-Long range | +,+++ | +,+ | ++,++ | Medium | Power or Space | |
| ISA101.11a | mesh | LR/LP-Short range | +,+++ | +,+ | ++,++ | Medium | Power or Space | |
| LoRa | star | LR/LP-Long range | +,++ | +,+ | ++,++ | Medium | Power | [18] |
| LTE-M | star | LR/LP-Long range | +,+ | +,+ | ++,++ | Medium | Time | [2] |
| MiWi | mesh | LR/LP-Long range | +,+++ | +,+ | ++,++ | Medium | Power | |
| NB-IoT | star | LR/LP-Long range | +,+ | +,+ | ++,++ | Medium | Time | [2] |
| RFID | star | LR/LP-Short range | +,+++ | +,+ | ++,++ | Medium | Power | [19,20,21,22,23] |
| Sigfox | star | LR/LP-Long range | +,+++ | +,+ | ++,++ | Medium | Power | [24,25] |
| Telensa | star | LR/LP-Long range | +,+++ | +,+ | ++,++ | Low | Power or Space | |
| Thread | mesh | LR/LP-Short range | +,+++ | +,+ | ++,++ | Medium | Power | |
| Weightless-N | star | LR/LP-Long range | +,+++ | +,+ | ++,++ | Medium | Power or Space | |
| Weightless-P | star | LR/LP-Long range | +,+++ | +,+ | ++,++ | Low | Power or Space | |
| Weightless-W | star | LR/LP-Long range | +,+++ | +,+ | ++,++ | Medium | Power | |
| WirelessHART | mesh | LR/LP-Short range | +,+++ | +,+ | ++,++ | Medium | Power | |
| WiFi802.11af | star | HR/HP-Long range | +,+ | +,+ | ++,++ | High | Time | |
| WiFi802.11ah/HaLoW | star | LR/LP-Long range | +,+ | +,+ | ++,++ | High | Time | |
| WiFi802.11az | star | HR/HP-Short range | +,+ | +,+ | ++,++ | High | Time | |
| WiFi802.11p (V2X) | mesh | HR/HP-Short range | +,+ | +,+ | ++,++ | High | Time | [26,27] |
| Wirepas | mesh | HR-Long range | +,+++ | +,+ | ++,++ | Medium | Power | |
| WiSUN | mesh | LR/LP-Long range | +,+++ | +,+ | ++,++ | Medium | Power | |
| ZigBee/ZigBee-NaN | mesh | LR/LP-Long range | +,+++ | +,+ | ++,++ | Medium | Power | [28,29,30] |
| Z-Wave | mesh | LR/LP-Long range | +,+++ | +,+ | ++,++ | Medium | Power or Space | |
| Technology | Frequency Bands | Channel Bandwidth (MHz) | Modulation Type (UNB/NB/ SS/OFDM/UWB) |
|---|---|---|---|
| 5G | GHz, mmWave | <100 | OFDM |
| ANT+ | GHz | 1 | NB |
| BLE mesh | GHz | 1 | NB |
| Dash7 | sub-GHz | 0.025, 0.200 | NB |
| EC-GSM-IOT | sub-GHz | 0.2 | NB |
| EnOcean | sub-GHz | 0.0625 | NB |
| Ingenu | sub-GHz and GHz | 1 | SS |
| ISA101.11a | GHz | 5 | SS |
| LoRa | sub-GHz | 0.125, 0.500 | SS |
| LTE-M | sub-GHz and GHz | 1.08, 1.4 | OFDM |
| MiWi | sub-GHz and GHz | 0.040, 0.250 | NB |
| NB-IoT | sub-GHz and GHz | 0.18 | NB, OFDM |
| RFID | sub-GHz and GHz | 0.2 | NB |
| Sigfox | sub-GHz | 0.2 | UNB |
| Telensa | sub-GHz | 0.1 | NB |
| Thread | GHz | 5 | NB |
| Weightless-N | sub-GHz | 0.2 | UNB |
| Weightless-P | sub-GHz | 0.0125 | NB |
| Weightless-W | sub-GHz | 5 | SS |
| WirelessHART | GHz | 0.25 | SS |
| WiFi802.11af | sub-GHz | 8 | OFDM |
| WiFi802.11ah | sub-GHz | 1, 2, 4, 8, 16 | OFDM |
| WiFi802.11az | GHz, mmWave | 20, 40, 60, 80, 160 | OFDM |
| WiFi802.11p (V2X) | GHz | 10 | OFDM |
| Wirepas | sub-GHz and GHz | 0.126, 0.5 | NB |
| WiSUN | sub-GHz and GHz | 0.2–1.2 | NB, SS and OFDM |
| ZigBee | sub-GHz and GHz | 0.6, 1.2, 2 | SS |
| ZigBee-NaN | sub-GHz | 0.6, 1.2, 2 | SS |
| Z-Wave | sub-GHz | 0.2 | NB |
| Area (m2) | Office Hours | Outside Office Hours | All Day |
|---|---|---|---|
| % of Correct Location Area Classification | |||
| 10 | |||
| 10 | |||
| 2 | |||
| 3 | |||
| Mean | |||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Figueiredo e Silva, P.; Kaseva, V.; Lohan, E.S. Wireless Positioning in IoT: A Look at Current and Future Trends. Sensors 2018, 18, 2470. https://doi.org/10.3390/s18082470
Figueiredo e Silva P, Kaseva V, Lohan ES. Wireless Positioning in IoT: A Look at Current and Future Trends. Sensors. 2018; 18(8):2470. https://doi.org/10.3390/s18082470
Chicago/Turabian StyleFigueiredo e Silva, Pedro, Ville Kaseva, and Elena Simona Lohan. 2018. "Wireless Positioning in IoT: A Look at Current and Future Trends" Sensors 18, no. 8: 2470. https://doi.org/10.3390/s18082470
APA StyleFigueiredo e Silva, P., Kaseva, V., & Lohan, E. S. (2018). Wireless Positioning in IoT: A Look at Current and Future Trends. Sensors, 18(8), 2470. https://doi.org/10.3390/s18082470