Author Contributions
Conceptualization, E.A., C.B. and V.A.; Data curation, E.A.; Formal analysis, E.A., K.J.K., C.B. and V.A.; Funding acquisition, I.G.; Investigation, E.A., V.A. and C.B.; Methodology, E.A., C.B., I.G., K.J.K., and V.A.; Project administration, R.G.; Software, E.A., K.J.K. and C.B.; Supervision, R.G.; Validation, E.A., K.J.K., I.G., C.B. and V.A.; Visualization, E.A. and K.J.K.; Writing-original draft, E.A., K.J.K. and V.A.; Writing-review & editing, E.A., K.J.K., C.B., R.G. and I.G.
Figure 1.
Depiction of MAPR system after donning by a subject (left); MAPR IMUs embedded in knee sleeves (middle); and circuit board of MAPR IMU (right).
Figure 1.
Depiction of MAPR system after donning by a subject (left); MAPR IMUs embedded in knee sleeves (middle); and circuit board of MAPR IMU (right).
Figure 2.
Flowchart of the complimentary filter method to calculate knee joint angle [
8]. Alignment algorithm rotates the measured angular velocities
g to be aligned with the joint axis
j (orientation vector of the joint axis in the sensor reference frame).
a, acceleration measured by the accelerometer;
o, displacement vector of the joint axis in the sensor reference frame;
v, acceleration due to gravity;
Ψ’, knee angular velocity;
Ψ, knee angle.
Figure 2.
Flowchart of the complimentary filter method to calculate knee joint angle [
8]. Alignment algorithm rotates the measured angular velocities
g to be aligned with the joint axis
j (orientation vector of the joint axis in the sensor reference frame).
a, acceleration measured by the accelerometer;
o, displacement vector of the joint axis in the sensor reference frame;
v, acceleration due to gravity;
Ψ’, knee angular velocity;
Ψ, knee angle.
Figure 3.
Flowchart of the GO algorithm. j, orientation vector of the joint axis in the sensor reference frame; g, measured angular velocity; Ψ’, knee angular velocity; Ψ, knee angle; NZC, Noise-Zero Crossing; LPF, Low Pass Filter; ZKA, Zero Knee Angle.
Figure 3.
Flowchart of the GO algorithm. j, orientation vector of the joint axis in the sensor reference frame; g, measured angular velocity; Ψ’, knee angular velocity; Ψ, knee angle; NZC, Noise-Zero Crossing; LPF, Low Pass Filter; ZKA, Zero Knee Angle.
Figure 4.
Swing and stance flexion intervals in the Vicon KAV. Zero-crossing in the Vicon KAV signal prior to swing flexion was used to delimit strides by the dashed lines. This zero-crossing was always found between MSt and TO. Blue area, Vicon KAV signal; Red line, MAPR SAV used to identify HS, MSt, and TO. HS, Heel-Strike; MSt, Mid-stance; TO, Toe-Off; MSw, Mid-swing; KAV, Knee Angular Velocity; dps, degrees per second.
Figure 4.
Swing and stance flexion intervals in the Vicon KAV. Zero-crossing in the Vicon KAV signal prior to swing flexion was used to delimit strides by the dashed lines. This zero-crossing was always found between MSt and TO. Blue area, Vicon KAV signal; Red line, MAPR SAV used to identify HS, MSt, and TO. HS, Heel-Strike; MSt, Mid-stance; TO, Toe-Off; MSw, Mid-swing; KAV, Knee Angular Velocity; dps, degrees per second.
Figure 5.
Swing and stance flexion time intervals. Times between zero-crossings in the Vicon KAV signal are delimited by the dashed lines and correspond to the physical time intervals of stance and swing flexion and extension. Blue area, Vicon KAV signal; Red line, MAPR SAV signal used to identify HS, MSt, and TO.
Figure 5.
Swing and stance flexion time intervals. Times between zero-crossings in the Vicon KAV signal are delimited by the dashed lines and correspond to the physical time intervals of stance and swing flexion and extension. Blue area, Vicon KAV signal; Red line, MAPR SAV signal used to identify HS, MSt, and TO.
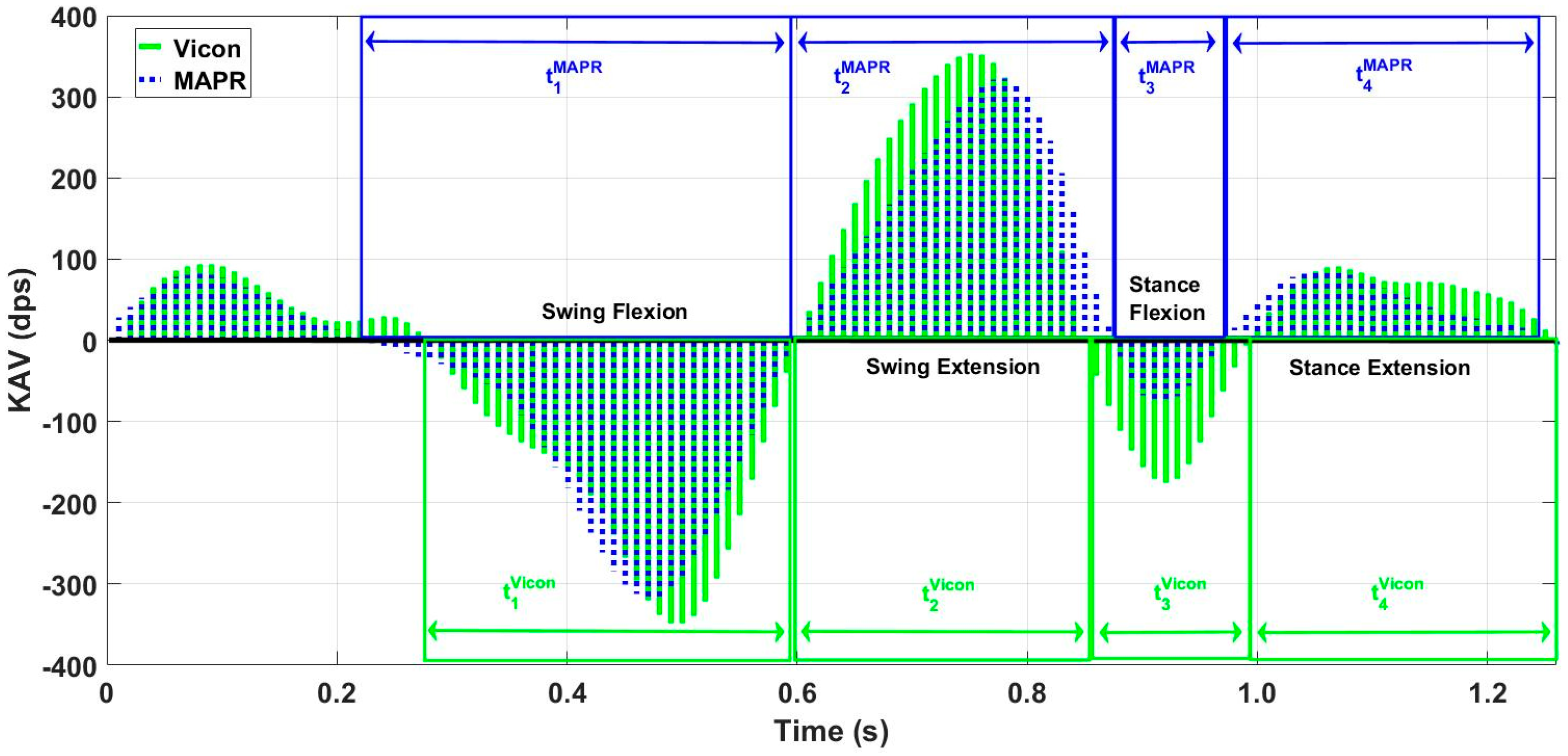
Figure 6.
Time interval comparison of manually aligned Vicon and MAPR KAV Signals. While areas and signal profiles are similar, they differ in length of flexion and extension intervals. Boxes delimit the flexion and extension intervals of swing and stance determined by each KAV. Difference in length of time interval was used in Bland–Altman analysis. Blue, MAPR KAV signal; Green, Vicon KAV signal.
Figure 6.
Time interval comparison of manually aligned Vicon and MAPR KAV Signals. While areas and signal profiles are similar, they differ in length of flexion and extension intervals. Boxes delimit the flexion and extension intervals of swing and stance determined by each KAV. Difference in length of time interval was used in Bland–Altman analysis. Blue, MAPR KAV signal; Green, Vicon KAV signal.
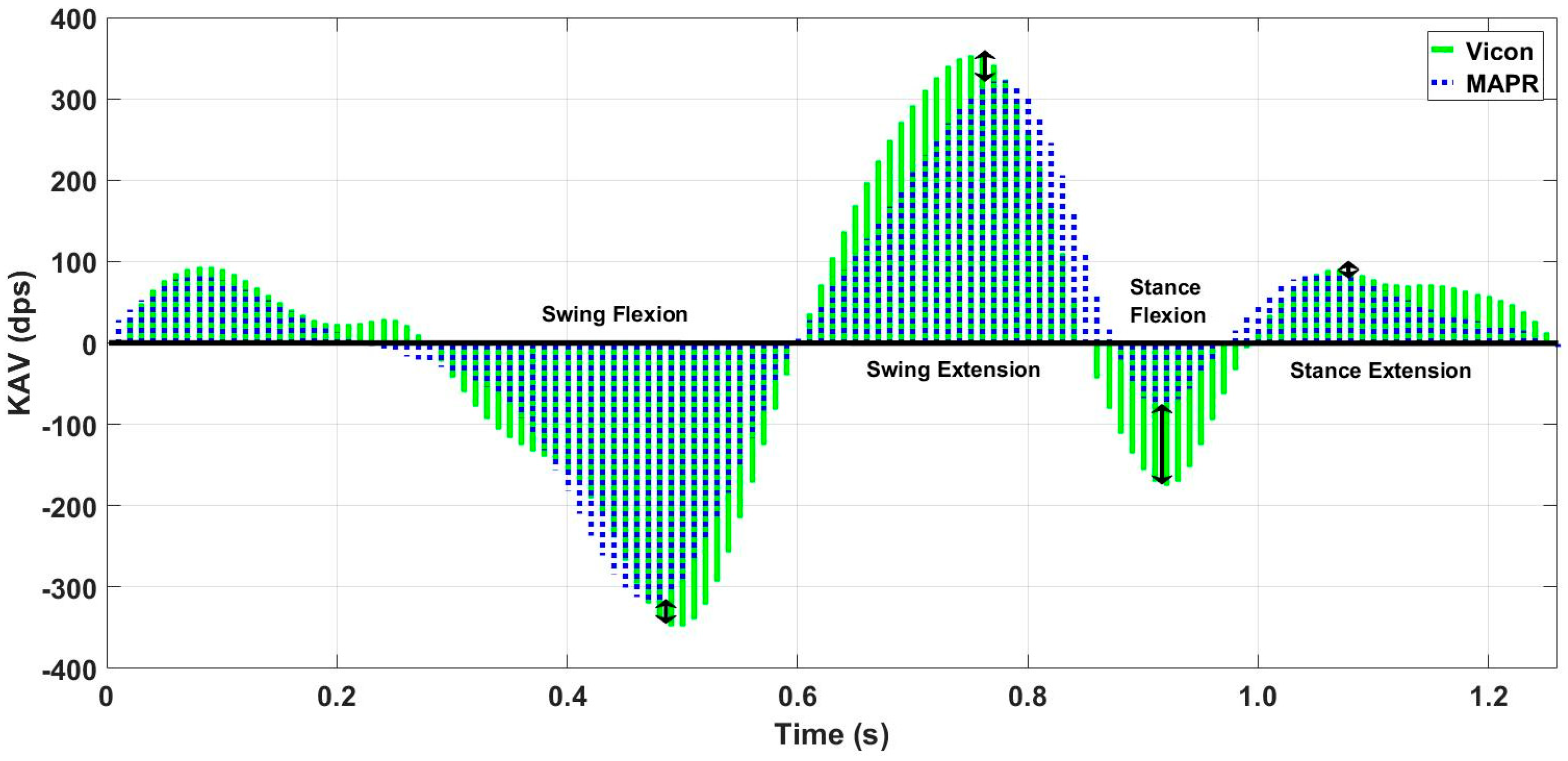
Figure 7.
Peak angular velocity comparison of manually aligned Vicon and MAPR KAV Signals. While areas and signal profiles are similar, they differ in location of peaks and depth of peak near HS. Arrows show difference in peak angular velocity for each phase being analyzed using Bland–Altman. Blue, MAPR KAV signal; Green, Vicon KAV signal.
Figure 7.
Peak angular velocity comparison of manually aligned Vicon and MAPR KAV Signals. While areas and signal profiles are similar, they differ in location of peaks and depth of peak near HS. Arrows show difference in peak angular velocity for each phase being analyzed using Bland–Altman. Blue, MAPR KAV signal; Green, Vicon KAV signal.
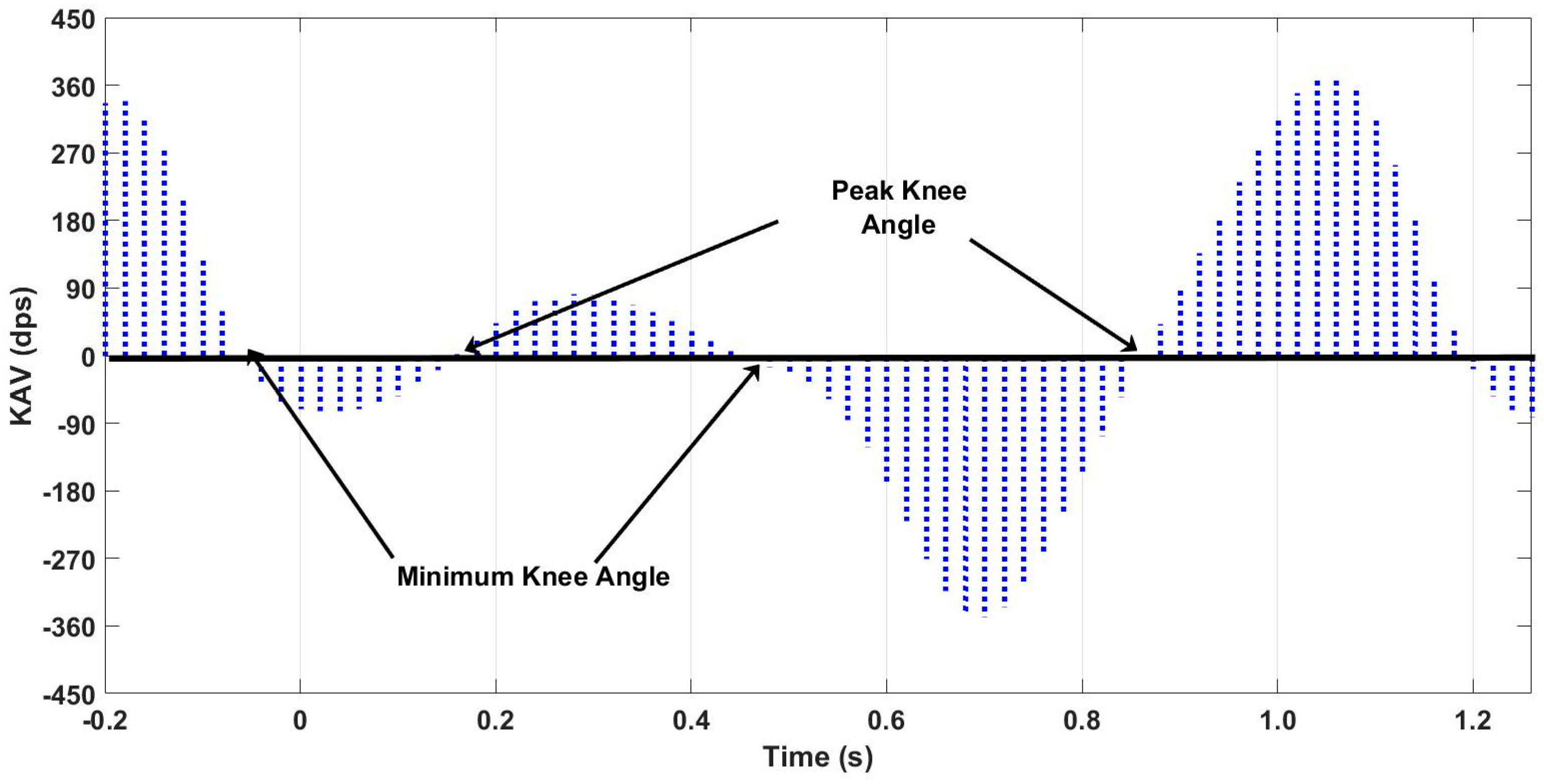
Figure 8.
Peaks and troughs in the knee angular velocity signal and its relationship to knee angle.
Figure 8.
Peaks and troughs in the knee angular velocity signal and its relationship to knee angle.
Figure 9.
Comparison of GO algorithm with Vicon for peak swing flexion.
Figure 9.
Comparison of GO algorithm with Vicon for peak swing flexion.
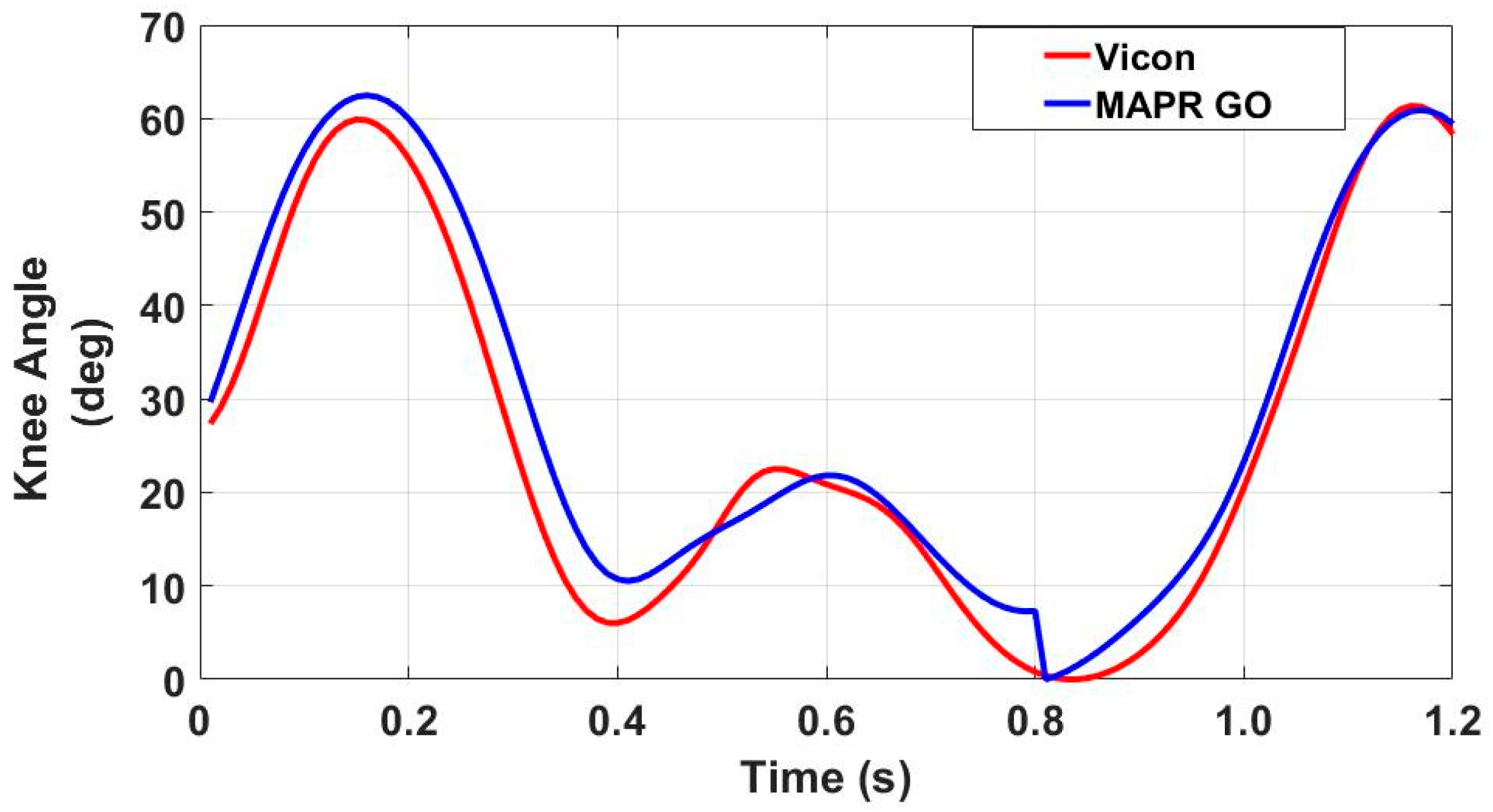
Figure 10.
Representative knee angle waveform extracted from a single pass using a motion capture system and IMU-based gyroscope only algorithm. Similar waveforms were observed between the two signals, with comparable peak heights and the largest difference in the signal set in a trough in between peaks.
Figure 10.
Representative knee angle waveform extracted from a single pass using a motion capture system and IMU-based gyroscope only algorithm. Similar waveforms were observed between the two signals, with comparable peak heights and the largest difference in the signal set in a trough in between peaks.
Figure 11.
Representative knee angle waveform under each condition. GO and CF performance were distinct from each other. GO consistently overestimated knee angle compared to CF.
Figure 11.
Representative knee angle waveform under each condition. GO and CF performance were distinct from each other. GO consistently overestimated knee angle compared to CF.
Table 1.
Bland–Altman Analysis Comparing Interval Times of MAPR and OMCS KAV during Flexion and Extension in Stance and Swing.
Table 1.
Bland–Altman Analysis Comparing Interval Times of MAPR and OMCS KAV during Flexion and Extension in Stance and Swing.
| Time (s) |
|---|
| Mean | LoA | CV |
|---|
| Stance | Flexion (t3) | 0.013 | [−0.043, 0.068] | 17% |
| Extension (t4) | 0.01 | [−0.075, 0.095] | 17% |
| Swing | Flexion (t1) | −0.013 | [−0.055, 0.029] | 6% |
| Extension (t2) | −0.015 | [−0.043, 0.014] | 5.3% |
| GCT | −0.0049 | [−0.052, 0.043] | 2.3% |
Table 2.
Bland–Altman Comparing Peak Values of MAPR and OMCS KAV during Flexion and Extension in Stance and Swing.
Table 2.
Bland–Altman Comparing Peak Values of MAPR and OMCS KAV during Flexion and Extension in Stance and Swing.
| Peak Angular Velocity (Deg/s) |
|---|
| Mean | LoA | CV |
|---|
| Stance | Flexion (t3) | 51 | [−1.4, 103] | 27% |
| Extension (t4) | 19 | [−5, 43] | 16% |
| Swing | Flexion (t1) | 61 | [−11, 130] | 12% |
| Extension (t2) | 41 | [−16, 98] | 9.6% |
Table 3.
Average value of angular displacement obtained by integrating knee angular velocity for inertial measurement units and optical motion capture systems. * significant difference.
Table 3.
Average value of angular displacement obtained by integrating knee angular velocity for inertial measurement units and optical motion capture systems. * significant difference.
| MAPR | Vicon |
|---|
| Mean ± SD (Deg) | p-Value | Mean ± SD (Deg) | p-Value |
|---|
| Swing | 0.795 ± 4.22 | 0.3283 | −0.12 ± 1.39 | 0.9005 |
| Stance | −1.88 ± 4.93 | 0.0536 | −0.065 ± 2.72 | 0.6494 |
| Stride | 2.67 ± 3.72 * | <0.001 | −0.56 ± 2.78 | 0.9158 |
Table 4.
Comparison of GO Algorithm with Vicon KAV Integral. Bland–Altman analysis of peak swing flexion detected from GO and Vicon.
Table 4.
Comparison of GO Algorithm with Vicon KAV Integral. Bland–Altman analysis of peak swing flexion detected from GO and Vicon.
| Angular Displacement (Deg) |
|---|
| Mean | LoA | CV |
|---|
| Trial | 5.2 | [−4.8, 15] | 9.6% |
| Subject | 5.0 | [−5.3, 15] | 9.9% |
Table 5.
Bland–Altman analysis of peak swing flexion within algorithms across IMU systems.
Table 5.
Bland–Altman analysis of peak swing flexion within algorithms across IMU systems.
| Level of Analysis | Peak Swing Flexion (Deg) |
|---|
| Mean | LoA | CV |
|---|
| CFMAPR vs. CFOpal | Stride | −0.66 | [−11, 9.5] | 9.6% |
| Trial | −0.56 | [−10, 8.9] | 9% |
| Subject | −0.065 | [−9.9, 8.6] | 8.9% |
| GOMAPR vs. GOOpal | Stride | −1.3 | [−9.3, 6.7] | 6.9% |
| Trial | −1.1 | [−8.4, 6.2] | 6.3% |
| Subject | −1.1 | [−8, 5.9] | 6.0% |
Table 6.
Bland–Altman analysis of peak swing flexion within algorithms across IMU Systems.
Table 6.
Bland–Altman analysis of peak swing flexion within algorithms across IMU Systems.
| Level of Analysis | Peak Swing Flexion (Deg) |
|---|
| Mean | LoA | CV |
|---|
| GOMAPR vs. CFMAPR | Stride | −5.5 | [−14, 2.5] | 7.2% |
| Trial | −5.5 | [−12, 0.81] | 5.7% |
| Subject | −5.4 | [−11, 0.54] | 5.4% |
| GOOpal vs. CFOpal | Stride | −4.9 | [−12, 2] | 6.3% |
| Trial | −5.0 | [−11, 1.4] | 5.8% |
| Subject | −5.0 | [−11, 1.1] | 5.6% |
| GOMAPR vs. EKFMAPR | Stride | −2.4 | [−11, 6] | 7.4% |
| Trial | −2.7 | [−11, 5.3] | 7.0% |
| Subject | −3.6 | [−10, 3.1] | 6.6% |
Table 7.
RMSE (deg) between CF and GO for each subject.
Table 7.
RMSE (deg) between CF and GO for each subject.
| Subject |
|---|
| 1 | 2 | 3 | 4 | 5 | 6 | Mean |
|---|
| GOMAPR vs. CFMAPR | 4.45 | 6.50 | 5.33 | 9.60 | 7.53 | 6.88 | 6.72 |
| GOOpal vs. CFOpal | 10.99 | 5.74 | 7.57 | 4.13 | 6.29 | 5.16 | 6.32 |
| GOMAPR vs. EKFMAPR | 4.37 | 6.77 | 6.45 | 4.39 | 6.42 | - | 5.68 |
Table 8.
CV (%) for peak swing flexion across IMU systems and knee angle algorithms.
Table 8.
CV (%) for peak swing flexion across IMU systems and knee angle algorithms.
| MAPR | Opal |
|---|
| GO | 4.48 | 3.79 |
| CF | 5.13 | 4.26 |

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}