Fractional-Order PID Control Strategy on Hydraulic-Loading System of Typical Electromechanical Platform

Abstract
:1. Introduction
2. Hydraulic Loading System
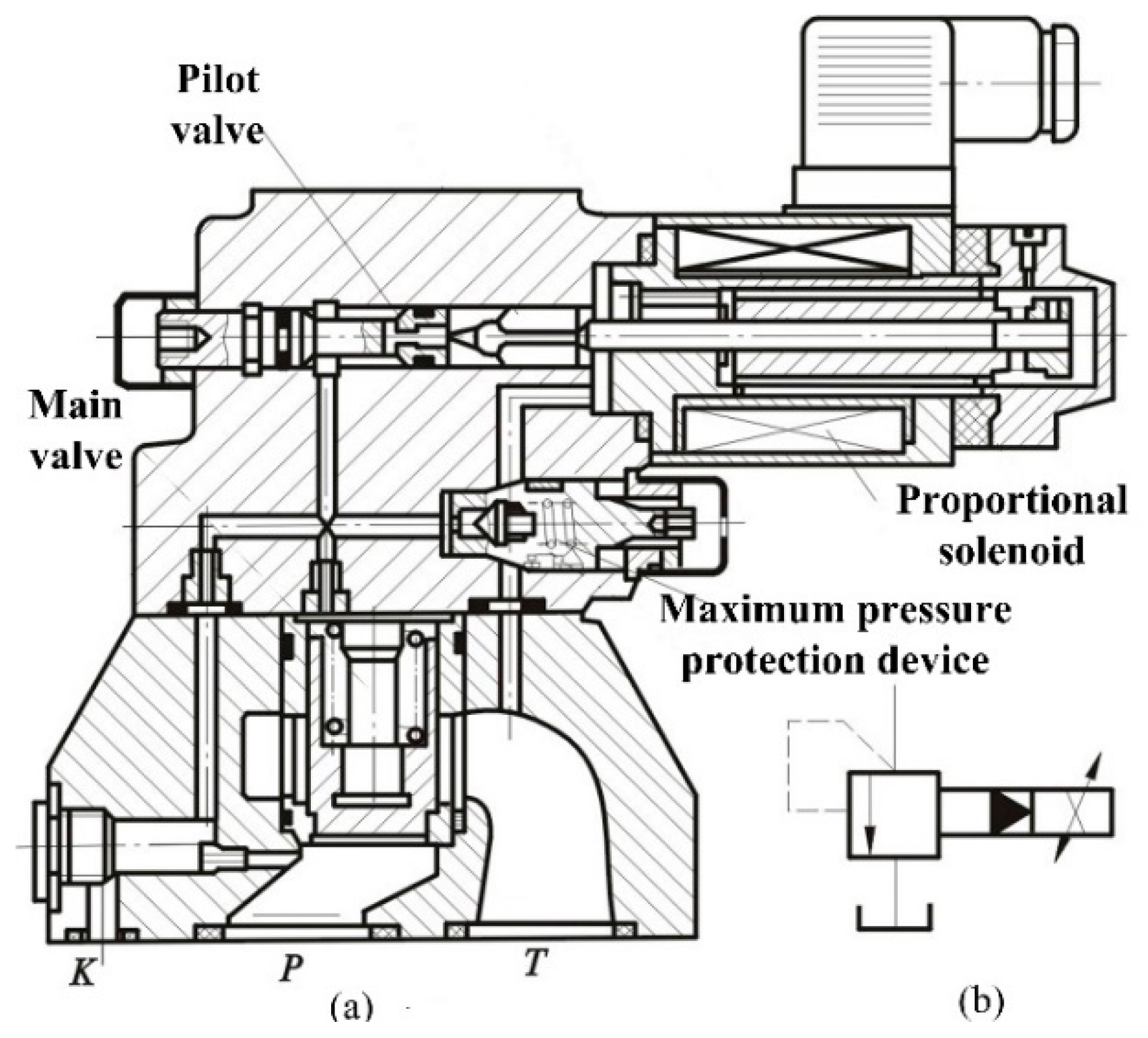
2.1. Working Principles of System
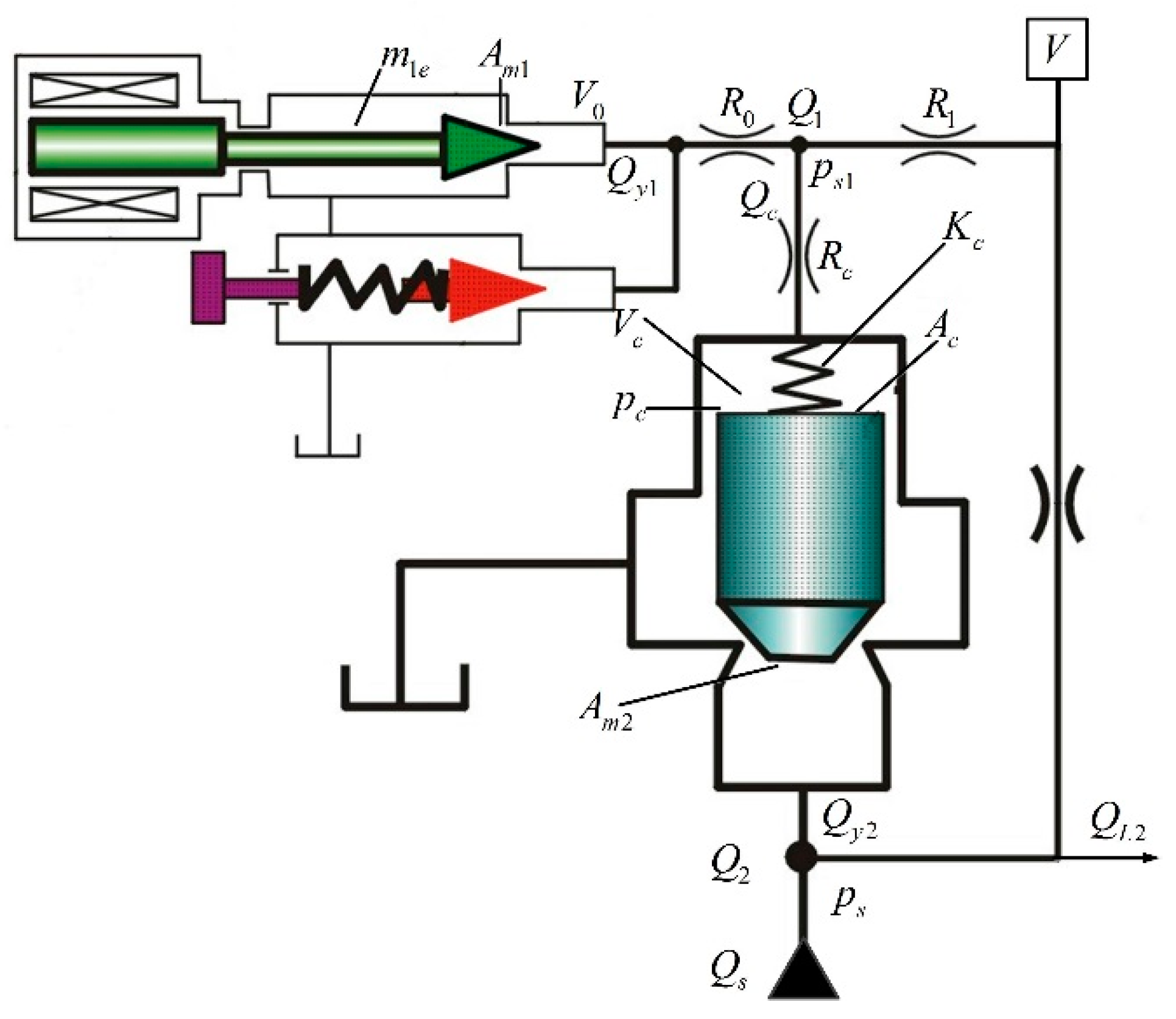
2.2. Model of Hydraulic Loading System
- (1).
- The flow generated by the main valve movement is minimal compared to the flow of the valve port. Therefore, its channel is negligible.
- (2).
- The flow of orifice is far less than the valve port flow, so its channel can be ignored.
- (3).
- Compared with the turning frequency formed in the closed volume V of the pump outlet and the natural frequency of the main valve, the turning frequency of the proportional electromagnet, the natural frequency of the pilot valve, and the turning frequency of the B half-bridge are larger. Therefore, the proportional amplifier and proportional electromagnet can be considered as a proportional component.
- (4).
- In order to simplify the model, the tiny disturbing force of the main valve spool is negligible.
- (5).
- The pilot valve is controlled by electric signal. V1 and Vc are very small. Therefore, the integral effect of the two links can be omitted.
- (1).
- The proportional amplifier can handle the input signal according to the actual needs, which belongs to the driving device. It is considered as a proportional component and its coefficient of proportionality is Ka.
- (2).
- The proportional electromagnet has a high response frequency compared to the hydraulic system. Therefore, the proportional electromagnet is also regarded as a proportional component. Its gain is Ki.
- (3).
- The simplified transfer function of the pilot valve is: .
- (4).
- is an instruction signal for the output of the pilot valve. is the driving force of the output of the proportional electromagnet.
- (5).
- The main valve is the core part of the whole system. According to hydraulic related knowledge, the following equation can be obtained from the flow equation, continuity equation and force balance equation of the hydraulic system.
3. Simulation and Experiment
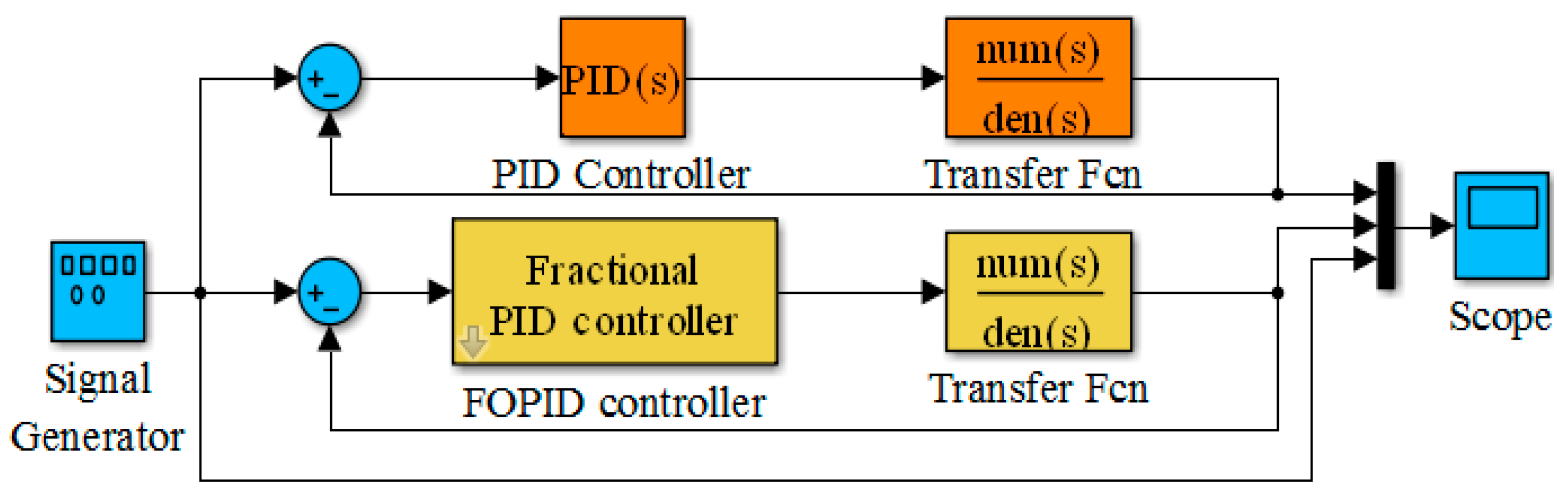
3.1. Simulation
- (1).
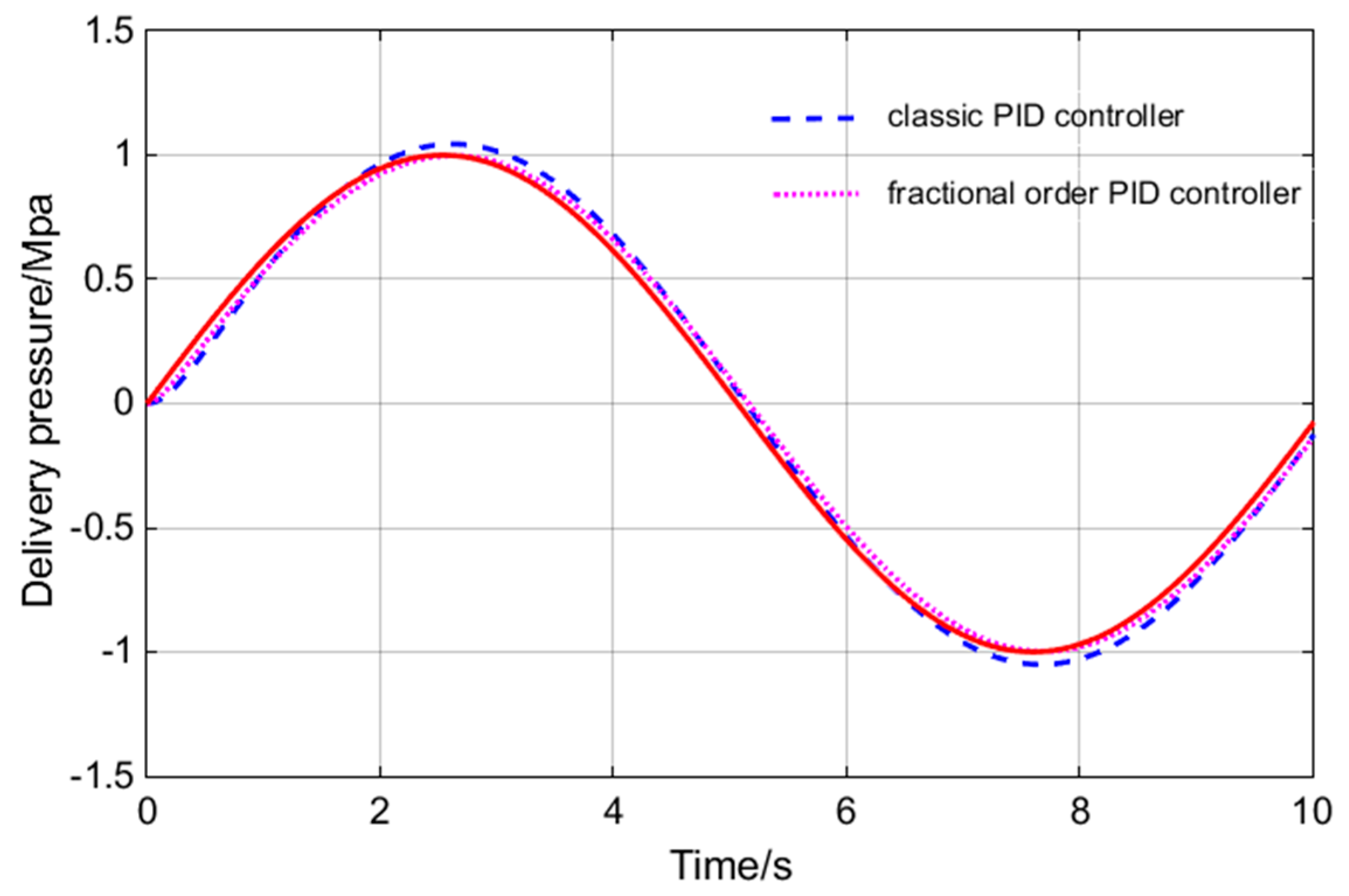
- The FOPID controller has many similarities with the traditional PID control.
- (2).
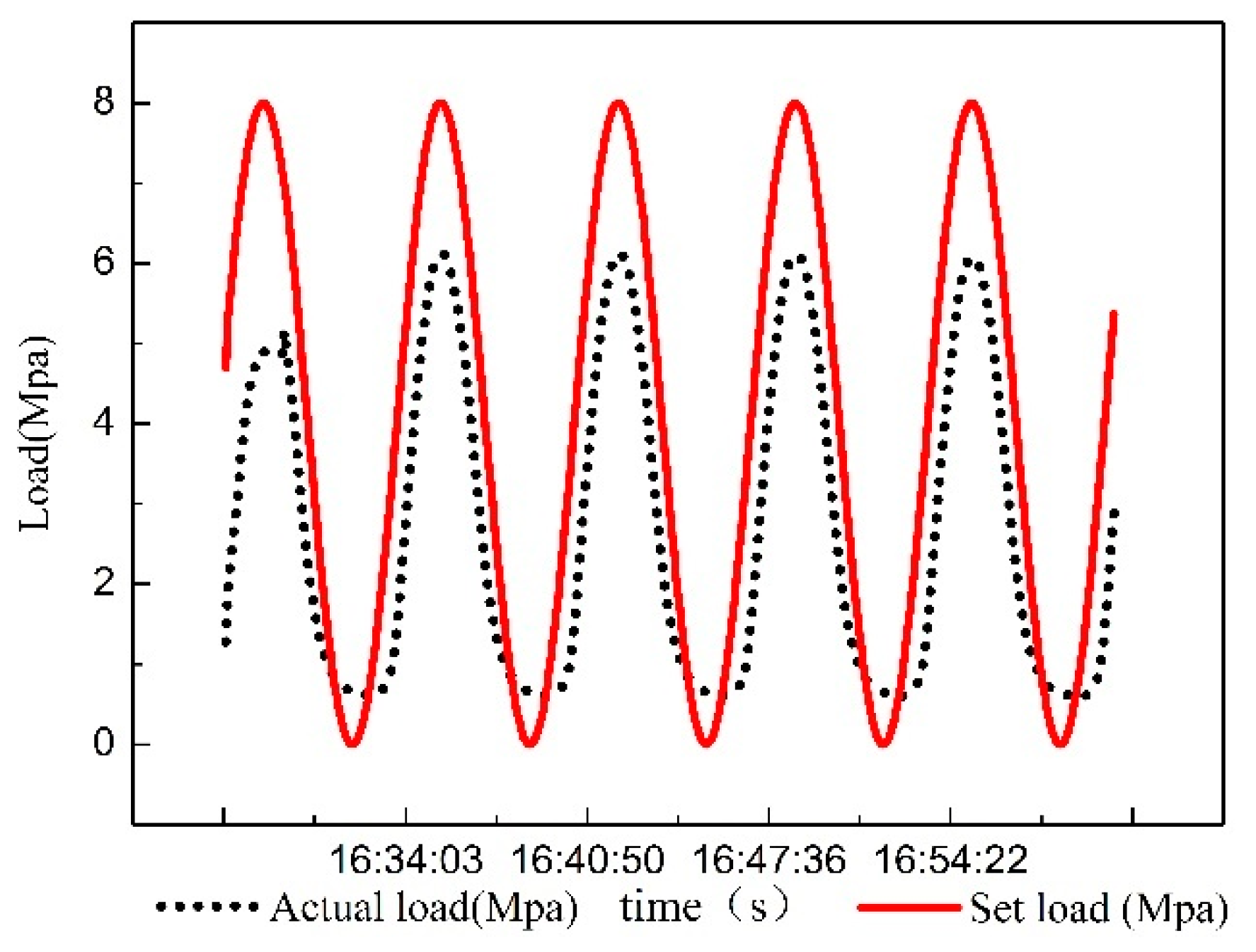
- The loading system of the test rig is used to simulate the rolling force in the industrial rolling process.
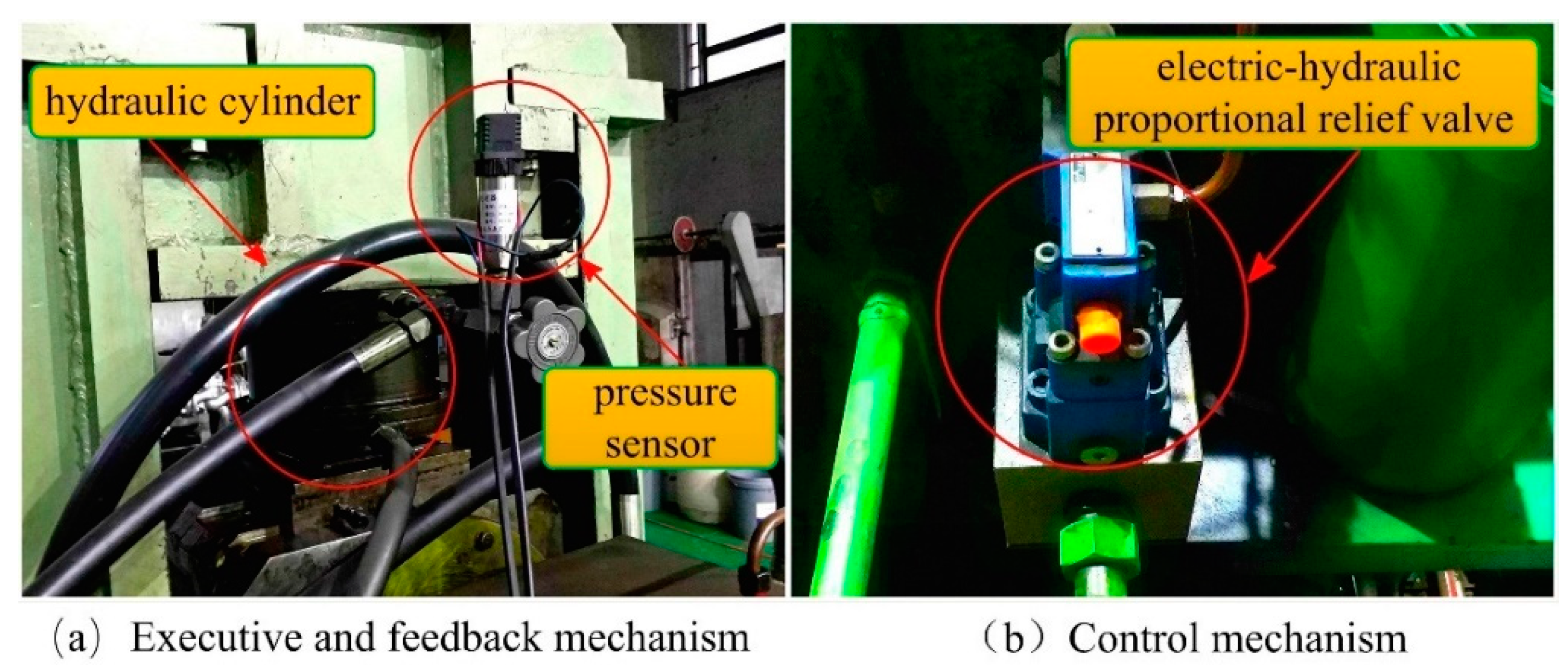
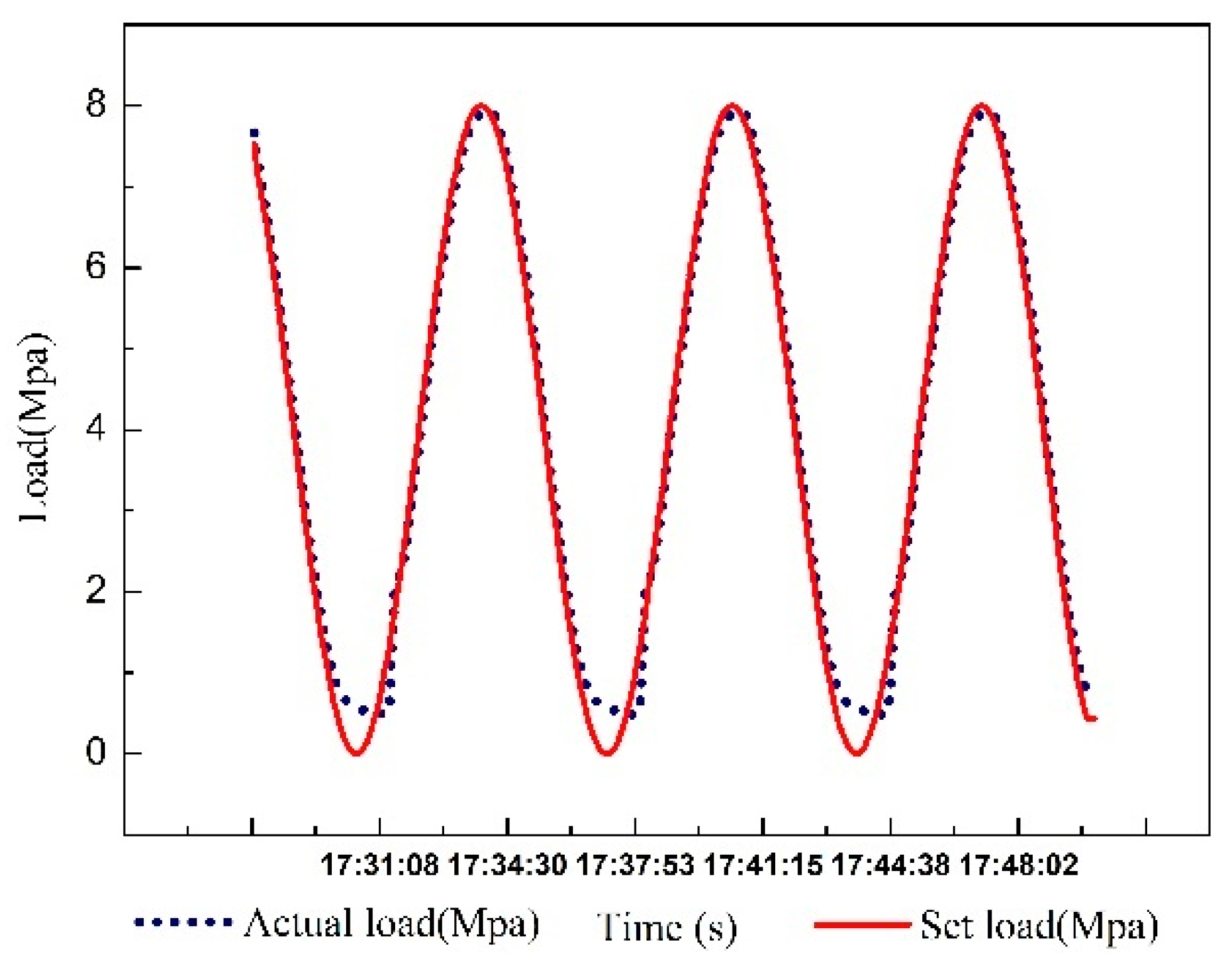
3.2. Experiment
4. Results and Discussion
5. Conclusions
- (1).
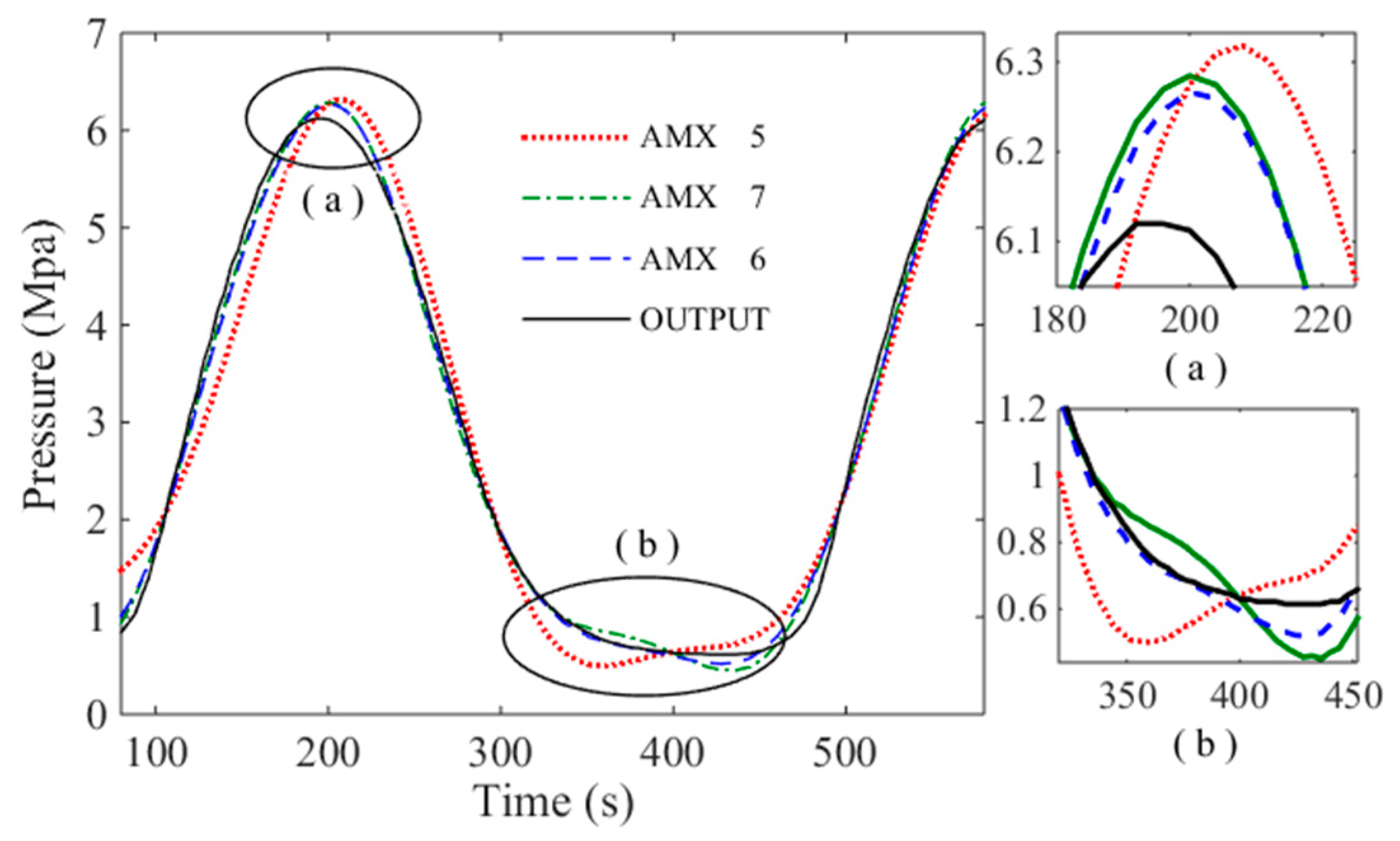
- The transfer function model was obtained by system parameter identification based on the ARMAX model. The 6th order transfer function has the best fit. The mathematical model of the hydraulic loading system was set up through theoretical analysis, which is also a 6-order transfer function.
- (2).
- In order to adapt to the hydraulic loading system, the FOPID controller and traditional PID controller were designed respectively using the tuning method based on the ITAE performance index. A series of parameters, such as , , , and were optimized.
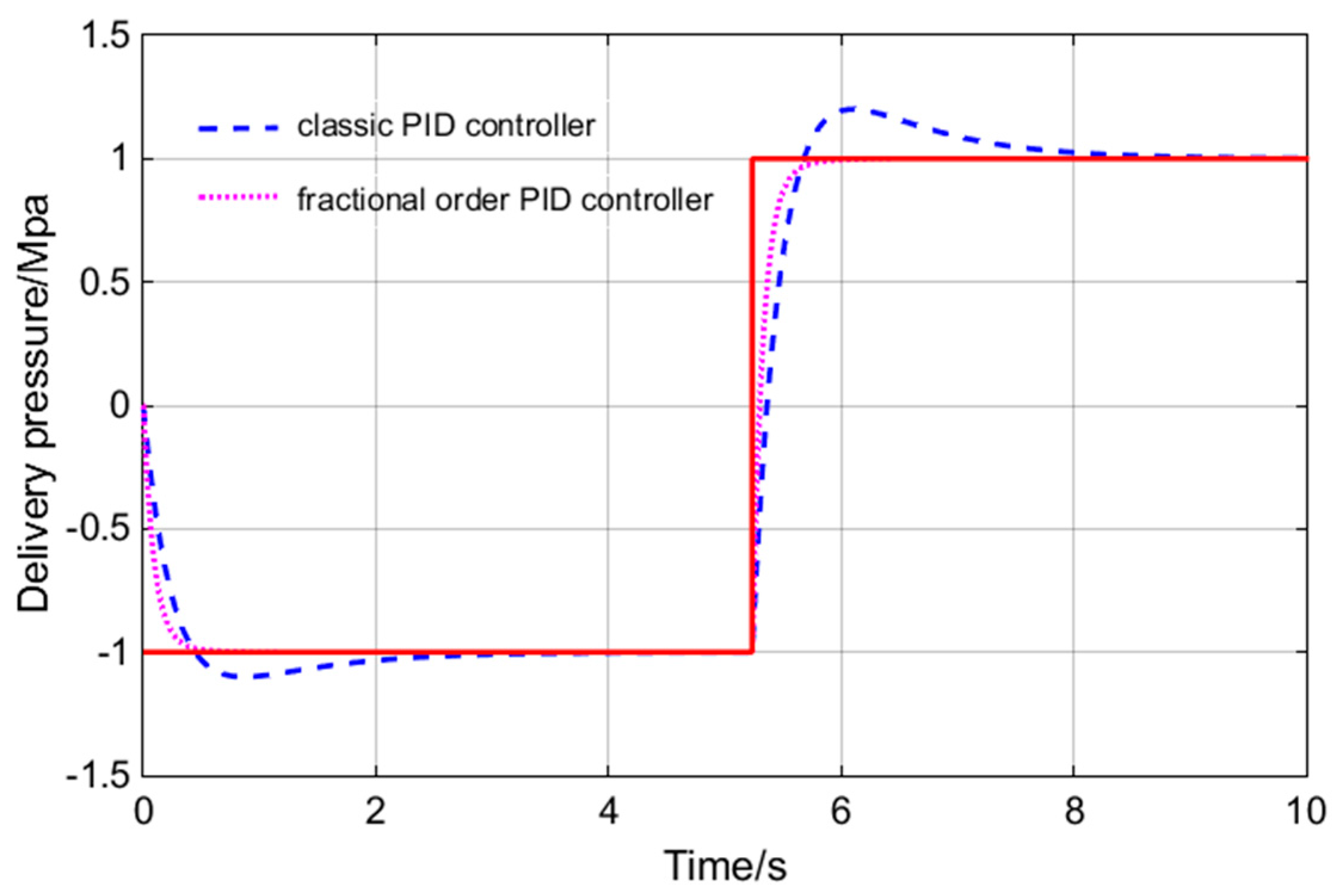
- (3).
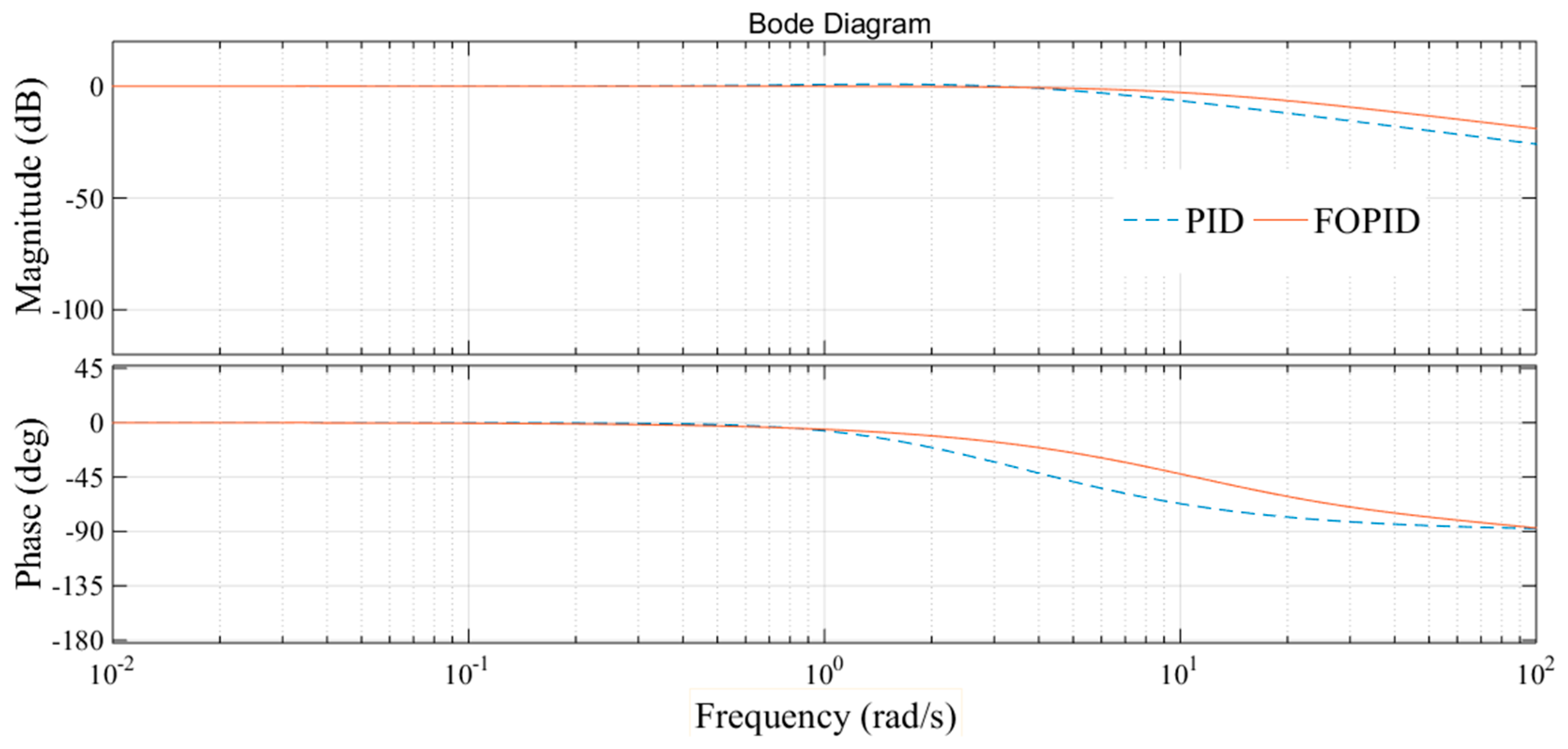
- The FOPID controller and PID controller were compared in time domain and frequency. It was found that the FOPID controller has a faster response speed and lower overshoot, which can better meet the control needs of the hydraulic loading system. In order to verify the performance of the FOPID controller on the electro-hydraulic system, experiments were carried out on the journal bearing test rig. The experimental results also prove that the FOPID controller has great control performance.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Elbayomy, K.M.; Jiao, Z.; Zhang, H. PID Controller Optimization by GA and Its Performances on the Electro-Hydraulic Servo Control System. Chin. J. Aeronaut. 2008, 21, 378–384. [Google Scholar] [CrossRef]
- Guan, C.; Pan, S. Adaptive sliding mode control of electro-hydraulic system with nonlinear unknown parameters. Control Theory Appl. 2008, 16, 1275–1284. [Google Scholar] [CrossRef]
- Toscano, R. A simple robust PI/PID controller design via numerical optimization approach. J. Process Control. 2005, 15, 81–88. [Google Scholar] [CrossRef]
- Mohanty, A.; Yao, B. Indirect Adaptive Robust Control of Hydraulic Manipulators with Accurate Parameter Estimates. IEEE Trans. Control Syst. Technol. 2011, 19, 567–575. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J.; Le, G.; Ma, D. Adaptive integral robust control of hydraulic systems with asymptotic tracking. Mechatronics 2016, 40, 78–86. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Yao, B.; Shang, Y. Nonlinear adaptive robust force control of hydraulic load simulator. Chin. J. Aeronaut 2012, 25, 766–775. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Yao, B. Nonlinear adaptive robust backstepping force control of hydraulic load simulator: Theory and experiments. J. Mech. Sci. Technol. 2014, 28, 1499–1507. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K. Force control for hydraulic load simulator using self-tuning grey predictor-fuzzy PID. Mechatronics 2009, 19, 233–246. [Google Scholar] [CrossRef]
- Niksefat, N.; Sepehri, N. Design and experimental evaluation of a robust force controller for an electro-hydraulic actuator via quantitative feedback theory. Control Eng. Pract. 2000, 8, 1335–1345. [Google Scholar] [CrossRef]
- Nam, Y.; Hong, S.K. Force control system design for aerodynamic load simulator. Control Eng. Pract. 2002, 10, 549–558. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K. Parallel control for electro-hydraulic load simulator using online self-tuning fuzzy pid technique. Asian J. Control 2011, 13, 522–541. [Google Scholar] [CrossRef]
- Yao, J.; Wang, X.; Hu, S.; Fu, W. Adaline neural network-based adaptive inverse control for an electro-hydraulic servo system. J. Vibr. Control. 2011, 17, 2007–2014. [Google Scholar] [CrossRef]
- Milić, V.; Šitum, Ž.; Essert, M. Robust ∞ position control synthesis of an electro-hydraulic servo system. ISA Trans. 2010, 49, 535–542. [Google Scholar] [CrossRef] [PubMed]
- Shen, G.; Zhu, Z.C.; Han, J.W. Adaptive feed-forward compensation for hybrid control with acceleration time waveform replication on electro-hydraulic shaking table. Control Eng. Pract. 2013, 21, 1128–1142. [Google Scholar]
- Karer, G.; Mušic, G.; Igor, Š. Feedforward control of a class of hybrid systems using an inverse model. Math. Comput. Simul. 2011, 82, 414–427. [Google Scholar] [CrossRef]
- Shen, G.; Zhu, Z.C.; Li, X. Real-time electro-hydraulic hybrid system for structural testing subjected to vibration and force loading. Mechatronics 2016, 33, 49–70. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional-order systems and fractional-order controllers. Inst. Exp. Phys. Slovak Acad. Sci. Kosice 1994, 12, 1–18. [Google Scholar]
- Xue, D.; Chen, Y. A comparative introduction of four fractional order controllers. In Proceedings of the 4th World Congress on Intelligent Control and Automation, Shanghai, China, 10–14 June 2002. [Google Scholar]
- Hamamci, S.E. An algorithm for stabilization of fractional-order time delay systems using fractional-order PID controllers. IEEE Trans. Autom. Control 2007, 52, 1964–1969. [Google Scholar] [CrossRef]
- Hamamci, S.E. Stabilization using fractional-order PI and PID controllers. Nonlinear Dyn. 2008, 51, 329–343. [Google Scholar] [CrossRef]
- Caponetto, R.; Dongola, G.; Fortuna, L.; Gallo, A. New results on the synthesis of FO-PID controllers. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 997–1007. [Google Scholar] [CrossRef]
- Tavakoli-Kakhki, M.; Haeri, M. Fractional order model reduction approach based on retention of the dominant dynamics: Application in IMC based tuning of FOPI and FOPID controllers. ISA Trans. 2011, 50, 432–442. [Google Scholar] [CrossRef] [PubMed]
- Barbosa, R.S.; Machado, J.T.; Galhano, A.M. Performance of fractional PID algorithms controlling nonlinear systems with saturation and backlash phenomena. J. Vib. Control 2007, 13, 1407–1418. [Google Scholar] [CrossRef]
- Yin, C.; Dadras, S.; Zhong, S.M.; Chen, Y.Q. Control of a novel class of fractional-order chaotic systems via adaptive sliding mode control approach. Appl. Math. Model. 2013, 37, 2469–2483. [Google Scholar] [CrossRef]
- Baleanu, D.; Machado, J.A.T.; Albert, C.; Luo, J. Fractional Dynamics and Control; Springer: New York, NY, USA, 2012. [Google Scholar]
- Rădac, M.B.; Precup, R.E.; Petriu, E.M.; Preitl, S. Iterative Data-Driven Tuning of Controllers for Nonlinear Systems with Constraints. IEEE Trans. Ind. Electr. 2014, 61, 6360–6368. [Google Scholar] [CrossRef]
- Sayyaf, N.; Tavazoei, M.S. Desirably Adjusting Gain Margin, Phase Margin, and Corresponding Crossover Frequencies Based on Frequency Data. IEEE Trans. Ind. Inf. 2017, 13, 2311–2321. [Google Scholar] [CrossRef]
- Zouari, F.; Boubellouta, A. Adaptive Neural Control for Unknown Nonlinear Time-Delay Fractional-Order Systems with Input Saturation. Adv. Synchron. Control Bifurc. Chaotic Fract.-Order Syst. 2018, 45, 54–98. [Google Scholar]
- Valerio, D.; da Costa, J.S. Tuning of fractional PID controllers with ziegler–nichols-type rules. Signal Process. 2006, 86, 2771–2784. [Google Scholar] [CrossRef]
- Zhao, C.; Xue, D.; Chen, Y. A fractional order PID tuning algorithm for a class of fractional order plants. In Proceedings of the 2005 IEEE International Conference Mechatronics and Automation, Niagara Falls, ON, Canada, 29 July–1 August 2005. [Google Scholar]
- Domingues, J.; Valerio, D.; Costa, J.S.D. Rule-based fractional control of an irrigation canal. In Proceedings of the 2009 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009. [Google Scholar]
- Muresan, C.I.; Folea, S.; Mois, G.; Dulf, E.H. Development and implementation of an FPGA based fractional order controller for a DC motor. Mechatronics 2013, 23, 798–804. [Google Scholar] [CrossRef]
- Pan, I.; Das, S. Chaotic multi-objective optimization based design of fractional order PIkDl controller in AVR system. Int. J. Electr. Power Energy Syst. 2012, 43, 393–407. [Google Scholar] [CrossRef]
- Pan, I.; Das, S. Frequency domain design of fractional order PID controller for AVR system using chaotic multi-objective optimization. Int. J. Electr. Power Energy Syst. 2013, 51, 106–118. [Google Scholar] [CrossRef] [Green Version]
- Zamani, M.; Karimi-Ghartemani, M.; Sadati, N.; Parniani, M. Design of a fractional order PID controller for an AVR using particle swarm optimization. Control Eng. Pract. 2009, 17, 1380–1387. [Google Scholar] [CrossRef]
- Taher, S.A.; Fini, M.H.; Aliabadi, S.F. Fractional order PID controller design for LFC in electric power systems using imperialist competitive algorithm. Ain Shams Eng. J. 2014, 5, 121–135. [Google Scholar] [CrossRef]
- Sondhi, S.; Hote, Y.V. Fractional order PID controller for load frequency control. Energy Convers. Manag. 2014, 85, 343–353. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, J.; Wang, S. Fractional order control to the electro-hydraulic system in insulator fatigue test device. Mechatronics 2013, 23, 828–839. [Google Scholar] [CrossRef]
- Xu, Y. Analysis and Design of Electro-Hudraulic Proportional Control System, 1st ed.; China Machine Press: Beijing, China, 2005. [Google Scholar]
- Bedoui, S.; Abderrahim, K. ARMAX Time Delay Systems Identification Based on Least Square Approach. IFAC-PapersOnLine 2015, 48, 1100–1105. [Google Scholar] [CrossRef]
- Xin, B.; Bai, Y.; Chen, J. Two-stage ARMAX Parameter Identification Based on Bias-eliminated Least Squares Estimation and Durbin s Method. Acta Autom. Sin. 2012, 38, 491–496. [Google Scholar] [CrossRef]
- Hernández-Alvarado, R.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Fonseca-Navarro, F. Neural Network-Based Self-Tuning PID Control for Underwater Vehicles. Sensors 2016, 16, 1429. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.; Chen, R. Optimal Self-Tuning PID Controller Based on Low Power Consumption for a Server Fan Cooling System. Sensors 2015, 15, 11685–11700. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Podlubny, I. Fractional order systems and PIλDμ-controllers. IEEE Trans. Autom. Control. 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Podlubny, I. The Laplace Transform Method for Linear Differential equations of the Fractional Order. arXiv, 1997; arXiv:funct-an/9710005. [Google Scholar]
- Vinagre, B.M.; Podlubny, I.; Hernández, A.; Feliu, V. Some approximations of fractional order operators used in control theory and applications. Fract. Calculus Appl. Anal. 2000, 3, 231–248. [Google Scholar]
- Oustaloup, A.; Levron, F.; Mathieu, B.; Nanot, F.M. Frequency-band complex noninteger differentiator: Characterization and synthesis. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2002, 47, 25–39. [Google Scholar] [CrossRef]
- Xu, F.; Li, D.; Xue, Y. Comparing and optimum seeking of pid tuning methods base on itae index. Proc. Chin. Soc. Electr. Eng. 2003, 23, 206–210. [Google Scholar]
- Åström, K.; Hägglund, T. PID Controllers: Theory, Design, and Tuning; Instrument Society of America: Research Triangle Park, NC, USA, 1995. [Google Scholar]
- Wang, J.; Kang, J.; Zhang, Y.; Huang, X. Viscosity monitoring and control on oil-film bearing lubrication with ferrofluids. Tribol. Int. 2014, 75, 61–68. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity |
|---|---|
| Proportional amplifier coefficient (A/V) | |
| Proportion electro-magnet gain (A/V) | |
| Equivalent damping coefficient on armature. | |
| Equivalent spring stiffness (N/m) | |
| Leakage coefficient of pilot valve | |
| Bulk modulus of elasticity of oil (N/m2) | |
| Total mass of poppet valve Spool and armature (kg) | |
| The action area of the liquid pressure on the end of poppet valve (m2) | |
| The cavity of Pilot valve | |
| The flow to cavity (m3/s) | |
| Liquid resistance | |
| The cavity in pilot liquid bridge | |
| the load flow of the pilot relief valve (m3/s) | |
| Output pressure of pilot valve (Pa) | |
| Liquid resistance | |
| Liquid resistance | |
| Spring stiffness (N/m) | |
| The volume between the damping hole and the upper chamber of the main valve. (m3) | |
| Pilot hydraulic bridge output pressure. (Pa) | |
| The pressure measurement area of the main valve spool on (m2) | |
| Pressure measuring surface of system pressure (m2) | |
| Flow of the main valve port (m3/s) | |
| Oil inlet cavity of the main valve | |
| Output pressure of the system (Pa) | |
| Load flow (m3/s) | |
| The output flow of Quantitative pump (m3/s) |
| Symbol | Quantity |
|---|---|
| Load volume of the pilot level (m3) | |
| The volume between the damping hole and the upper chamber of the main valve (m3) | |
| The pressure measurement area of the main valve spool on (m2) | |
| Pilot hydraulic bridge output pressure (Pa) | |
| Quality of main valve spool (kg) | |
| Displacement of the main valve spool (m) | |
| The spring stiffness on the main valve spool (N/m) | |
| The output pressure of the main stage of the relief valve (Pa) | |
| The output flow of Quantitative pump (m3/s) | |
| Damping ratio of main valve spool | |
| Load flow (m3/s) | |
| Closed volume of pump outlet pressure zone (m3) | |
| Flow of the main valve port (m3/s) | |
| Discharge coefficient of main valve port (m2/s) | |
| Flow-pressure coefficient of main valve port (m5/(N·s)) | |
| Disturbance power on the main valve spool (N) | |
| Input current (A) | |
| Leakage coefficient of main valve | |
| Pressure sensor coefficient | |
| Flow gain of the valve port of cone valve (m2/s) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, N.; Wang, J.; Li, Z.; Tang, X.; Hou, D. Fractional-Order PID Control Strategy on Hydraulic-Loading System of Typical Electromechanical Platform. Sensors 2018, 18, 3024. https://doi.org/10.3390/s18093024
Wang N, Wang J, Li Z, Tang X, Hou D. Fractional-Order PID Control Strategy on Hydraulic-Loading System of Typical Electromechanical Platform. Sensors. 2018; 18(9):3024. https://doi.org/10.3390/s18093024
Chicago/Turabian StyleWang, Ning, Jianmei Wang, Zhixiong Li, Xuefeng Tang, and Dingbang Hou. 2018. "Fractional-Order PID Control Strategy on Hydraulic-Loading System of Typical Electromechanical Platform" Sensors 18, no. 9: 3024. https://doi.org/10.3390/s18093024
APA StyleWang, N., Wang, J., Li, Z., Tang, X., & Hou, D. (2018). Fractional-Order PID Control Strategy on Hydraulic-Loading System of Typical Electromechanical Platform. Sensors, 18(9), 3024. https://doi.org/10.3390/s18093024