Damage Identification for Underground Structure Based on Frequency Response Function


Abstract
:1. Introduction
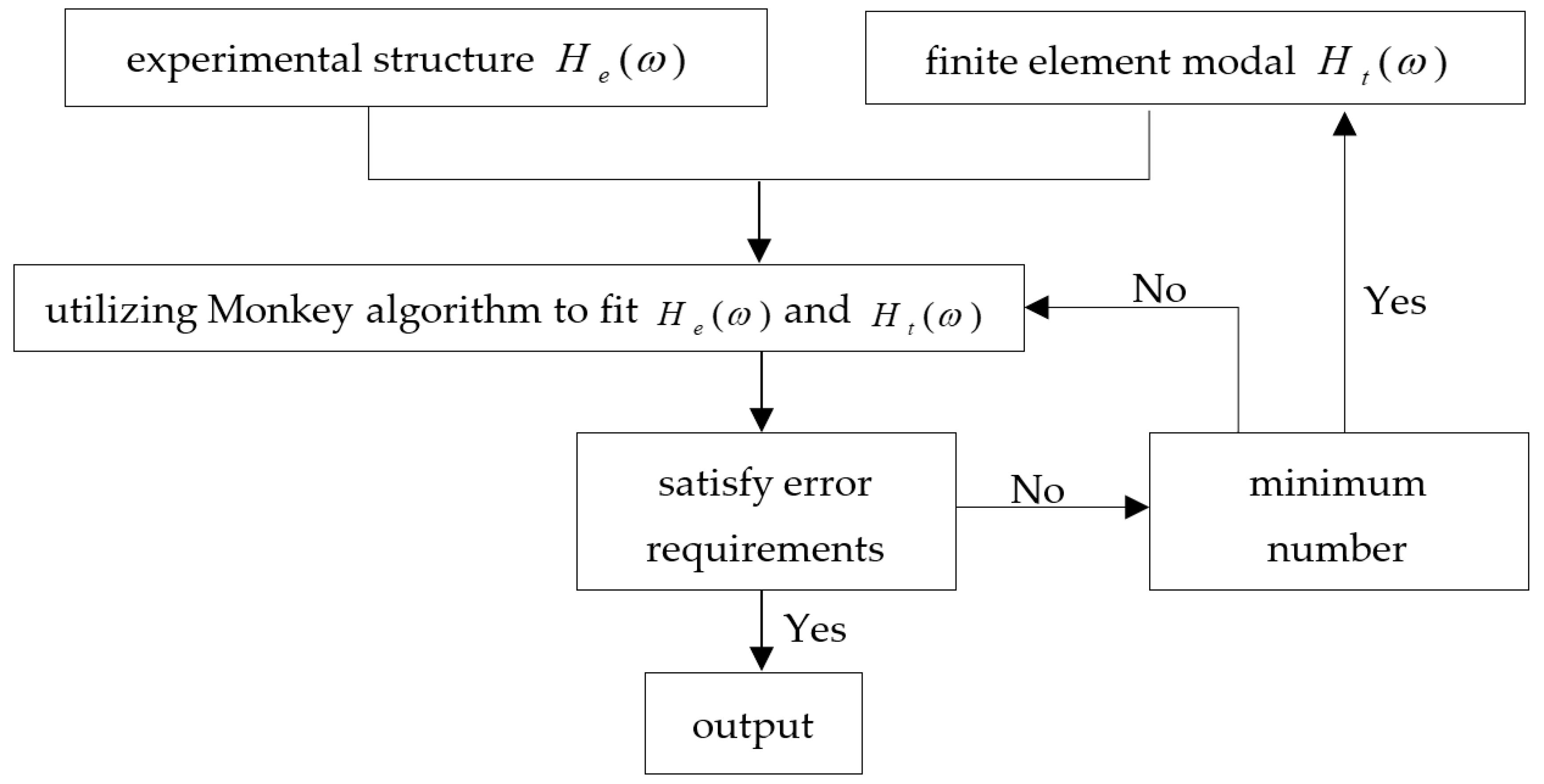
2. Damage Identification Theory based on Acceleration Frequency Response Function
3. Experimental Study
3.1. Similarity Analysis
- (1)
- Geometry
- (2)
- Mass and mass distribution
- (3)
- Gravity and inertial forces
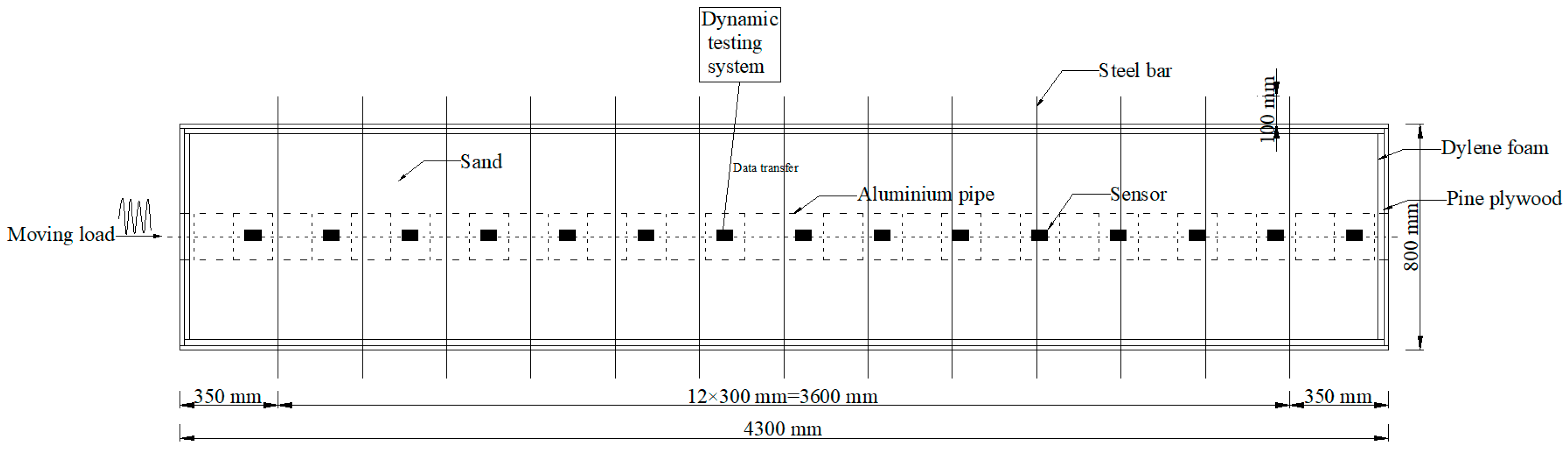
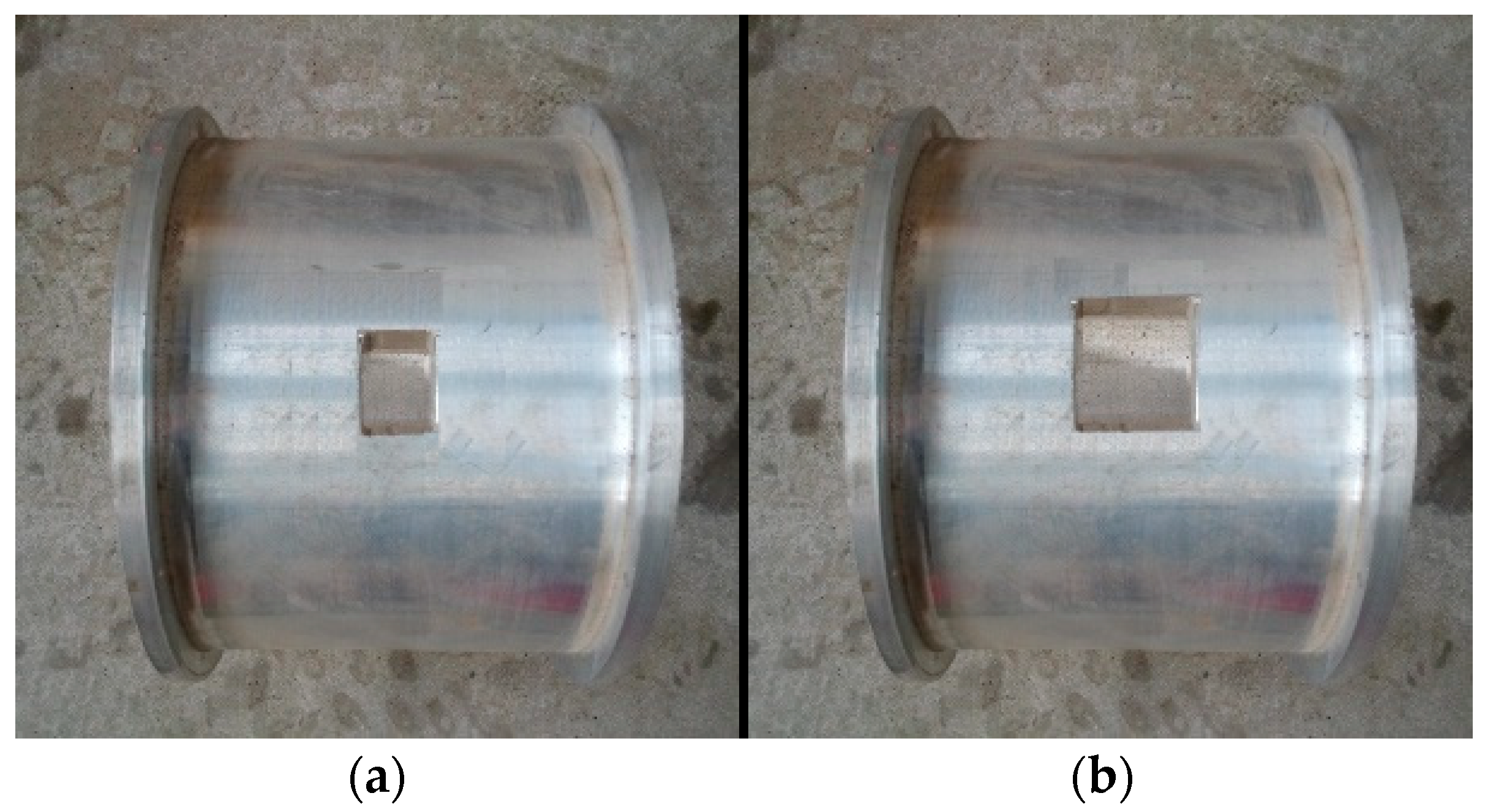
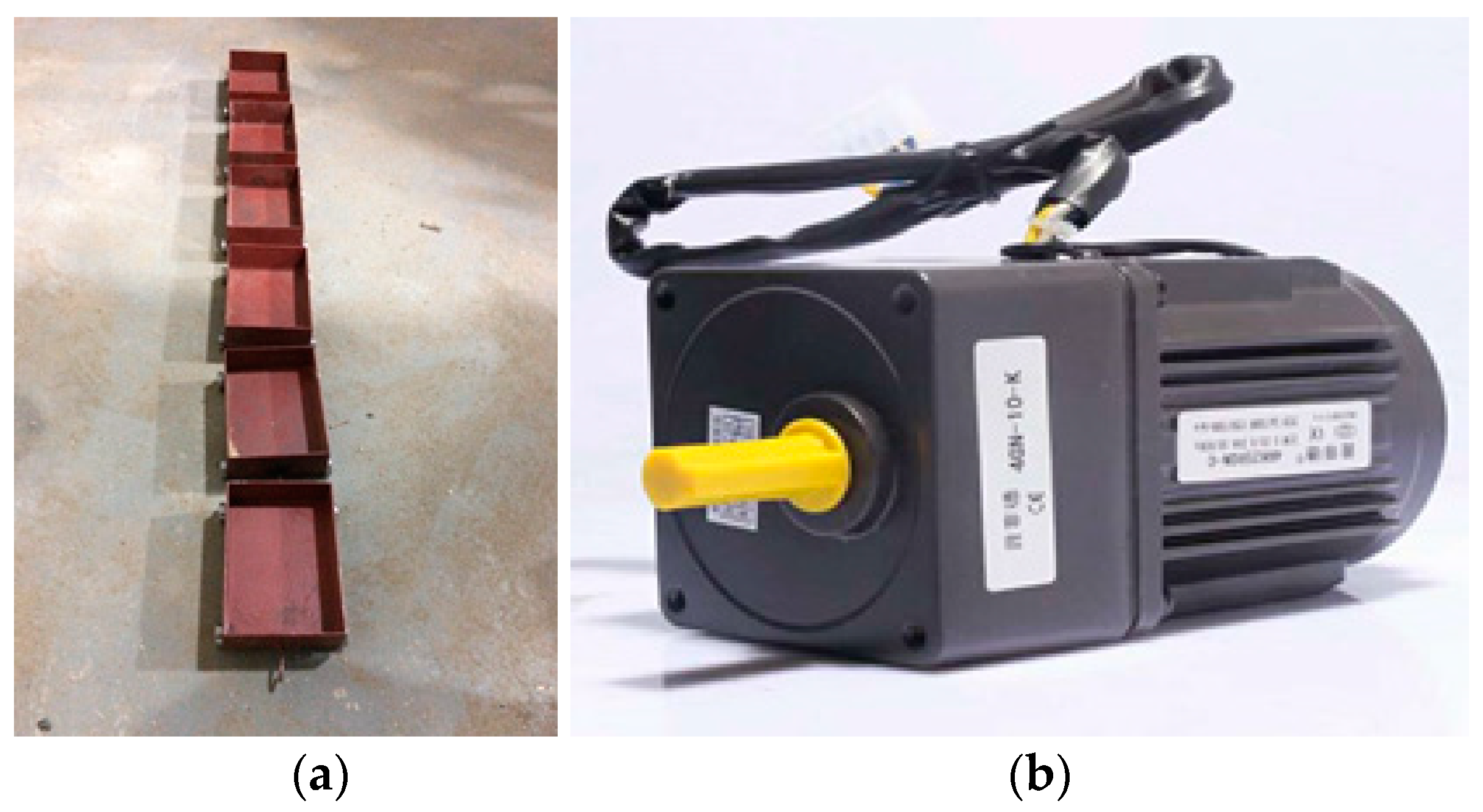
3.2. Description of Tested Structures
3.3. Experimental Results and Analysis
4. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Feng, L.; Yi, X.H.; Zhu, D.P.; Xie, X.Y.; Wang, Y. Damage detection of metro tunnel structure through transmissibility function and cross correlation analysis using local excitation and measurement. Mech. Syst. Signal Process. 2015, 60–61, 59–74. [Google Scholar] [CrossRef]
- Li, H.N.; Li, D.S.; Ren, L.; Yi, T.H.; Jia, Z.G.; Li, K.P. Structural health monitoring of innovative civil engineering structures in Mainland China. Struct. Monit. Maint. 2016, 3, 1–32. [Google Scholar] [CrossRef]
- Li, H.N.; Ren, L.; Jia, Z.G.; Yi, T.H.; Li, D.S. State-of-the-art in structural health monitoring of large and complex civil infrastructures. J. Civ. Struct. Health Monit. 2016, 6, 3–16. [Google Scholar] [CrossRef]
- Sadhu, A.; Narasimhan, S.; Antoni, J. A review of output-only structural mode identification literature employing blind source separation methods. Mech. Syst. Signal Process. 2017, 94, 415–431. [Google Scholar] [CrossRef]
- Dora, F.; Vincenzo, G.; Francesco, P. Output-Only Identification and Model Updating by Dynamic Testing in Unfavorable Conditions of a Seismically Damaged Building. Comput. Aided Civ. Infrastruct. Eng. 2014, 29, 659–675. [Google Scholar]
- Martin, S.; Marcus, G.; Steffen, M. OA precisenon-destructivedamageidentification technique of long and slender structures based on modal data. J. Sound Vib. 2016, 365, 89–101. [Google Scholar]
- Jiaze, H.; Fuh-Gwo, Y. Damage identification for composite structures using a cross-correlation reverse-time migration technique. Struct. Health Monit. 2015, 14, 558–570. [Google Scholar]
- Yang, Q.W.; Sun, B.X. Structural damage identification based on best achievable flexibility change. Appl. Math. Model. 2011, 35, 5217–5224. [Google Scholar] [CrossRef]
- Zou, Y.; Tong, L.; Steven, G.P. Vibration-based model-dependent damage (delamination) identification and health monitoring for composite strucures. J. Sound Vib. 2000, 230, 357–378. [Google Scholar] [CrossRef]
- Daniele, D.; Gabriele, C. Damage identification techniques via modal curvature analysis: Overview and comparison. Mech. Syst. Signal Process. 2015, 52–53, 181–205. [Google Scholar]
- Chang, P.C.; Flatau, A.; Liu, S.C. Review Paper: Health Monitoring of Civil Infrastructure. Struct. Health Monit. 2003, 2, 257–267. [Google Scholar] [CrossRef] [Green Version]
- Park, J.H.; Kim, J.T.; Hong, D.S.; Mascarenas, D.; Lynch, J.P. Autonomous smart sensor nodes for global and local damage detection of prestressed concrete bridges based on accelerations and impedance measurements. Smart Struct. Syst. 2010, 6, 711–730. [Google Scholar] [CrossRef]
- Seyedpoor, S.M.; Yazdanpanah, O. An efficient indicator for structural damage localization using the change of strain energy based on static noisy data. Appl. Math. Model. 2014, 38, 2661–2672. [Google Scholar] [CrossRef]
- Cao, M.; Xu, W.; Ostachowicz, W.; Su, Z.Q. Damage identification for beams in noisy conditions based on Teager energy operator-wavelet transform modal curvature. J. Sound Vib. 2014, 233, 1543–1553. [Google Scholar] [CrossRef]
- Yoon, M.K.; Heider, D.; Gillespie, J.W., Jr.; Ratcliffe, C.P.; Crane, R.M. Local damage detection using the two-dimensional gapped smoothing method. J. Sound Vib. 2005, 279, 119–139. [Google Scholar] [CrossRef]
- Katunin, A. Stone impact damage identification in composite plates using modal data and quincunx wavelet analysis. Arch. Civ. Mech. 2015, 15, 251–261. [Google Scholar] [CrossRef]
- Ulriksen, M.D.; Tcherniak, D.; Kirkegaard, P.H.; Damkilde, L. Operational modal analysis and wavelet transformation for damage identification in wind turbine blades. Struct. Health Monit. 2016, 15, 381–388. [Google Scholar] [CrossRef] [Green Version]
- Katunin, A.; Dragan, K.; Dziendzikowski, M. Damage identification in aircraft composite structures: A case study using various non-destructive testing techniques. Compos. Struct. 2015, 127, 1–9. [Google Scholar] [CrossRef]
- Palaez, M.; Krawczuk, M. Vibration parameters for damage detection in structures. J. Sound Vib. 2002, 249, 999–1010. [Google Scholar]
- Amezquita-Sanchez, J.P.; Adeli, H. Signal Processing Techniques for Vibration-Based Health Monitoring of Smart Structures. Arch. Comput. Methods Eng. 2016, 23, 1–15. [Google Scholar] [CrossRef]
- Qu, W.L.; Chen, W. Seismic damage diagnosis of frame structure using artificial neural network. Earthq. Eng. Eng. Vib. 2002, 22, 43–48. [Google Scholar]
- Yang, Q.W.; Liu, J.K. Structural damage identification with flexibility changed: A review. J. Vib. Shock. 2011, 30, 147–153. [Google Scholar]
- Zong, Z.H.; Huang, D.Z. Damage diagnosis of a steel-concrete composite bridge by ETR index. China Civ. Eng. J. 2011, 37, 59–69. [Google Scholar]
- Cha, Y.J. Structural damage detection using modal strain energy and hybrid multiobjective optimization. Comput. Aided Civ. Infrastruct. Eng. 2015, 30, 347–358. [Google Scholar] [CrossRef]
- Moradipour, P.; Tommy, H.T.; Chaminda, G. An improved modal strain energy method for structural damage detection, 2D simulation. Struct. Eng. Mech. 2015, 54, 105–119. [Google Scholar] [CrossRef]
- TaeKim, J.; Ryu, Y.S.; Cho, H.M.; Stubbs, N. Damage identification in beam-type structures: Frequency-based method vs mode-shape-based method. Eng. Struct. 2003, 25, 57–67. [Google Scholar]
- Feng, D.M.; Feng, M.Q. Output-only damage detection using vehicle-induced displacement response and mode shape curvature index. Struct. Control Health Monit. 2016, 23, 1088–1107. [Google Scholar] [CrossRef]
- Feng, D.M.; Feng, M.Q. Experimental validation of cost-effective vision-based structural health monitoring. Mech. Syst. Signal Process. 2017, 88, 199–211. [Google Scholar] [CrossRef]
- Yi, W.J. Damage diagnosis of structures by genetic algorithms. Eng. Mech. 2001, 18, 64–71. [Google Scholar]
- Wang, D.S.; Zhou, P.; Jin, T.; Zhu, H.P. Damage Identification for beam atructures using the Laplace Transform-based spectral element method and strain statistical moment. J. Aerosp. Eng. 2018, 31. [Google Scholar] [CrossRef]
- Sun, H.; Feng, D.M.; Liu, Y.; Feng, M.Q. Statistical regularization for identification of structural parameters and external loadings using state space models. Comput. Aided Civ. Infrastruct. Eng. 2015, 30, 843–858. [Google Scholar] [CrossRef]
- Gabriele, C.; Filipe, M.; Filippo, U.; Alvaro, C. On vibration-based damage detection by multivariate statistical techniques: Application to a long-span arch bridge. Struct. Health Monit. 2016, 15, 505–524. [Google Scholar]
- Wang, D.S.; Xiang, W.; Zhu, H.P. Damage identification in beam type structures based on statistical moment using a two step method. J. Sound Vib. 2014, 333, 745–760. [Google Scholar] [CrossRef]
- Imregun, M.; Visser, W.J.; Ewins, D.J. Finite element model updating using frequency response function data: I. Theory and initial investigation. Mech. Syst. Signal Process. 1995, 9, 187–202. [Google Scholar] [CrossRef]
- Lin, R.M.; Zhu, J. Model updating of damped structures using FRF data. Mech. Syst. Signal Process. 2006, 20, 2200–2218. [Google Scholar] [CrossRef]
- Li, M.W.; Hong, J.Z. Research on model updating method based on frequency response functions. Shanghai Jiaotong Univ. 2011, 45, 1455–1459. [Google Scholar] [CrossRef]
- García-Palencia, A.J.; Santini-Bel, E. Structural model updating using dynamic data. J. Civ. Struct. Health Monit. 2014, 5, 115–127. [Google Scholar] [CrossRef]
- Arora, V.; Singh, S.P.; Kundra, T.K. On the use of damped updated FE model for dynamic design. Mech. Syst. Signal Process. 2009, 23, 580–587. [Google Scholar] [CrossRef]
- Lin, R.M. Identification of modal parameters of unmeasured modes using multiple FRF modal analysis method. Mech. Syst. Signal Process. 2011, 25, 151–162. [Google Scholar] [CrossRef]
- Shadan, F.; Khoshnoudian, F.; Esfandiari, A. A frequency response-based structural damage identification using model updating method. Struct. Control Health Monit. 2015. [Google Scholar] [CrossRef]
- TranXuan, D.; He, J.; Choudhury, R. Damage detection of truss structures using measured frequency response function data. In Proceedings of the 15th International Modal Analysis Conference, Orlando, FL, USA, 3–6 February 1997; pp. 961–967. [Google Scholar]
- Balls Crema, L.; Mastroddi, F. A direct approach for updating and damage detection by using FRF data. In Proceedings of the 16th International Seminar on Modal Analysis, Leuven, Belgium, 16–18 September 1998; pp. 159–166. [Google Scholar]
- Zou, W.; Qu, W. Structural damage identification based on frequency response function and genetic algorithm. J. Vib. Shock 2008, 27, 28–30. [Google Scholar]
- Khoshnoudian, F.; Esfandiari, A. Structural damage diagnosis using modal data. Sci. Iranica 2011, 18, 853–860. [Google Scholar] [CrossRef]
- Yang, Y.; Song, Y. A method of truss structural damage identification based on principal component analysis and frequency response function. Eng. Mech. 2007, 24, 105–110. [Google Scholar] [CrossRef]
- Staszewski, W.J.; Wallace, D.M. Wavelet-based Frequency Response Function for time-variant systems—An exploratorystudy. Mech. Syst. Signal Process. 2014, 47, 35–49. [Google Scholar] [CrossRef]
- Belleri, A.; Moaveni, B.; Restrepo, J.I. Damage assessment through structural identification of a three-story large-scale precast concrete structure. Earthq. Eng. Struct. Dyn. 2014, 43, 61–76. [Google Scholar] [CrossRef]
- Zhu, H.P.; Mao, L.; Weng, S. Calculation of Dynamic Response Sensitivity to Substructural Damage Identification under Moving Load. Adv. Struct. Eng. 2016, 16, 1621–1631. [Google Scholar] [CrossRef]
- Li, J.; Law, S.S.; Zhu, H.P. Improved damage identification in bridge structures subject to moving loads: Numerical and experimental studies. Int. J. Mech. Sci. 2013, 74, 99–111. [Google Scholar] [CrossRef] [Green Version]
- Alvandi, S.A.; Cremona, C. Assessment of vibration-based damage identification techniques. J. Sound Vib. 2006, 292, 179–202. [Google Scholar] [CrossRef]
- Zhang, J.B. Dynamic analysis of structures based on spectral element method. Huazhong Univ. Sci. Technol. 2001. [Google Scholar]
- Zhang, R.Q.; Tang, W.S. Monkey algorithm for global numerical optimization. J. Uncertain. Syst. 2008, 2, 165–176. [Google Scholar]
- Zhang, T.; Xia, Y.; Zong, M.L. Optimization of gas filling station project scheduling problem based on monkey algorithm. Value Eng. 2010, 8, 90–92. [Google Scholar]
- Zhang, J.J.; Zhang, Y.P.; Sun, J.Z. Intrusion detection technology based on monkey algorithm. Comput. Eng. 2011, 37, 131–133. [Google Scholar]
- Yi, T.H.; Li, H.N.; Zhang, X.D. Sensor placement on Canton Tower for health monitoring using asynchronous-climb monkey algorithm. Smart Mater. Struct. 2012, 21, 125023. [Google Scholar] [CrossRef]
- Wang, J.R.; Yun, Y.X.; Zeng, Y. Discrete monkey algorithm and its application in transmission network expansion planning. J. Tianjin Univ. 2010, 43, 798–803. [Google Scholar]
- Faug, T.; Naaim, M.; Bertrand, D.; Lachamp, P.; Naaim-Bouvet, F. Varying Dam Height to Shorten the Run-Out of Dense Avalanche Flows: Developing a Scaling Law from Laboratory Experiments. Surv. Geophys. 2003, 24, 555–569. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Scale | Prototype | Desired Model | Adopted Model | |
|---|---|---|---|---|---|
| Soil model | Length | ||||
| Height | |||||
| Depth | |||||
| Bulk density | |||||
| Shield tunnel model | Inner diameter | ||||
| Outer diameter | |||||
| Length |
| Label | Segment No. | Damage Location | Group A | Group B | Damage Severity | ||
|---|---|---|---|---|---|---|---|
| Damage Scenario | Damage Type | Damage Scenario | Damage Type | ||||
| 0 | Null | Null | UDMa | Bar | UDMb | Block | Null |
| 1 | S10 | x = 9 m~10 m | DMG1a | bar | DMG1b | block | |
| 2 | S10 | x = 9 m~10 m | DMG2a | bar | DMG2b | block | |
| 3 | S15 | x = 14 m~15 m | DMG3a | bar | DMG3b | block | |
| 4 | S20 | x = 19 m~20 m | DMG4a | bar | DMG4b | block | |
| 5 | S10 | x = 9 m~10 m | DMG5a | bar | DMG5b | block | |
| S20 | x = 19 m~20 m | bar | block | ||||
| 6 | S10 | x = 9 m~10 m | DMG6a | bar | DMG6b | block | |
| S20 | x = 19 m~20 m | bar | block | ||||
| 7 | S10 | x = 9 m~10 m | DMG7a | bar | DMG7b | block | |
| S15 | x = 14 m~15 m | bar | block | ||||
| 8 | S10 | x = 9 m~10 m | DMG8a | bar | DMG8b | block | |
| S15 | x = 14 m~15 m | bar | block | ||||
| S20 | x = 19 m~20 m | bar | block | ||||
| Range (g) | |
| Sensitivity (mV/g) | |
| Frequency Response (Hz) | 0–600 |
| Output Noise, Differential [Root Mean Square, typical] () | |
| Max Shock [()] () | |
| Non-Linearity () | |
| Bias Tem. Shift () | |
| Type | Micro-machined capacitive sense element |
| Excitation Voltage (VDC) | |
| Output Impedance | |
| Operating Current | |
| Differential Output | |
| Cross Axis Sensitivity | |
| Operating Temperature | |
| Damping | Nitrogen Gas Damped |
| Overal Size () | |
| Weight (g) | |
| Housing | 6061 Aluminunum, IP67 rated |
| Cable | BDI-RC-187 (specify length) |
| Element Number | Unmodified | Modified | |
|---|---|---|---|
| 5 | 2.71 × 109 | 2.09 × 109 | 6.20 × 108 |
| 7 | 2.71 × 109 | 2.38 × 109 | 3.33 × 108 |
| 10 | 2.71 × 109 | 2.21 × 109 | 5.00 × 108 |
| 13 | 2.71 × 109 | 2.53 × 109 | 1.80 × 108 |
| 14 | 2.71 × 109 | 2.49 × 109 | 2.11 × 108 |
| 17 | 2.71 × 109 | 1.89 × 109 | 8.25 × 108 |
| 20 | 2.71 × 109 | 2.07 × 109 | 6.40 × 108 |
| Element Number | Undamaged | Damaged | (%) | |
|---|---|---|---|---|
| 5 | 2.09 × 109 | 2.03 × 109 | 6.48 × 107 | |
| 7 | 2.38 × 109 | 2.35 × 109 | 3.33 × 107 | |
| 10 | 2.21 × 109 | 1.73 × 109 | 4.81 × 108 | |
| 13 | 2.53 × 109 | 2.43 × 109 | 9.87 × 107 | |
| 14 | 2.49 × 109 | 2.44 × 109 | 4.73 × 107 | |
| 17 | 1.89 × 109 | 1.68 × 109 | 2.08 × 107 | |
| 20 | 2.07 × 109 | 1.98 × 109 | 8.90 × 107 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Long, X.; Luo, H.; Zhu, H. Damage Identification for Underground Structure Based on Frequency Response Function. Sensors 2018, 18, 3033. https://doi.org/10.3390/s18093033
Wang S, Long X, Luo H, Zhu H. Damage Identification for Underground Structure Based on Frequency Response Function. Sensors. 2018; 18(9):3033. https://doi.org/10.3390/s18093033
Chicago/Turabian StyleWang, Shengnan, Xiaohong Long, Hui Luo, and Hongping Zhu. 2018. "Damage Identification for Underground Structure Based on Frequency Response Function" Sensors 18, no. 9: 3033. https://doi.org/10.3390/s18093033
APA StyleWang, S., Long, X., Luo, H., & Zhu, H. (2018). Damage Identification for Underground Structure Based on Frequency Response Function. Sensors, 18(9), 3033. https://doi.org/10.3390/s18093033