1. Introduction
GPS is susceptible to a variety of interferences due to the low signal power. For GPS receivers, there are two major types of interferences at present: jamming and spoofing. Strong interferences are used in jamming, usually resulting in loss of lock and positioning failure of the target receiver. Hence the concealment of this interference is poor. On the other hand, spoofing is a structural interference, the counterfeit signals rebroadcasted by spoofers are very similar to the authentic signals from satellites and can gradually induce the positioning results of the target receiver to a false location [
1,
2,
3,
4]. Compared with jamming, spoofing is less likely to be found by the target receiver and hence is more sinister.
The early spoofing is simplistic. Specifically, one simply attaches a power amplifier and a transmitting antenna to a satellite signal simulator and broadcasts the counterfeit signals toward the target receiver. However, the simplistic spoofing usually needs the cooperation of jamming to bring the target receiver into the reacquisition first. In 2008, Humphreys et al. successfully developed a repeater based on a software receiver, which can directly deceive the target receiver at the tracking stage. It reminds people of the threat of spoofing once again [
1]. Correspondingly, research on anti-spoofing began to develop rapidly. In 2012, Jafarnia-Jahromi et al. made a comprehensive study of spoofing threats and briefly introduced different techniques for two main categories, namely spoofing detection and spoofing mitigation [
5]. According to the description of related papers, common spoofing countermeasures can be categorized to four groups: signal power anomaly detection [
2,
3], time-of-arrival anomaly detection [
6,
7,
8], space processing [
9,
10,
11,
12], and correlation peak distortion detection [
13,
14,
15,
16,
17]. Daneshmand [
12] proposed adaptive antenna array beamforming null steering method, which can directly shield the counterfeit signals from a single interference source. However, it is difficult in deploying multiple antennas. In view of the diversity of spoofing, Broumandan used multiple anti-spoofing methods simultaneously on the receiver and achieved the mitigation of simplistic spoofing [
18]. However, on the whole, most of the current anti-spoofing techniques are merely able to detect the spoofing. This means that the target receiver can ensure that the positioning results are not affected by closing the corresponding channels after detecting the spoofing only when the number of the authentic signals spoofed with the counterfeit signals is small.
Based on the discussions above, the spoofing mitigation needs to be further researched in anti-spoofing. Multipath and spoofing share the similarity that they distort the correlation peaks of the composite signals. In particular, if the carrier frequency of the counterfeit signal deviates from that of its corresponding authentic signal, the distortion of the correlation peak of the composite signal will be serious. Instead, if the carrier frequency of the counterfeit signal is consistent with that of its corresponding authentic signal, the correlation peak of the composite signal of spoofing will be similar to that of multipath, which is the most difficult situation to detect and handle. Hence, the carrier frequencies of the counterfeit signal and its corresponding authentic signal are set to be the same (frequency lock mode) [
19]. As a result, multipath mitigation approaches can be applied to anti-spoofing [
20]. However, the counterfeit signals rebroadcasted by spoofers and the multipath signals are significantly different. The major differences are as follows [
21]:
- (1)
Except for the special case that the direct signal is blocked, multipath signals from a satellite are typically weaker than its direct signal, while the counterfeit signals for spoofing are usually slightly higher in power than the authentic signals.
- (2)
The correlation peaks of multipath signals lag behind the correlation peak of the corresponding direct signal. The distance between these two kinds of peaks is commonly considered to be quite close. The effective overlapping of these two kinds of peaks indicates a quite close distance. By contrast, the counterfeit signals for spoofing can be aligned with the authentic signals, even ahead of the authentic signals. The distance between the correlation peaks of these two kinds of signals may be either far or close.
It means that not all multipath mitigation methods can be generalized to anti-spoofing. For example, the code phase discriminators of the multipath mitigation methods represented by early/late slope technique are specifically designed for the characteristics of multipath effects and cannot be applied to anti-spoofing. Multipath estimation is another type of important multipath mitigation methods. The composite signals are corrected to restore the direct signals on the basis of estimating the specific parameters of multipath signals. Such methods are usually based on least squares estimation, ML estimation, or Bayesian estimation and require fewer assumptions on multipath signals. Hence, such methods are promising in anti-spoofing.
The rest of this paper is organized as follows.
Section 2 briefly introduces the characteristics of a repeater and the spoofing rebroadcasted by it.
Section 3 starts from the concepts of ML estimation and constructs the tracking channels with multi-correlators.
Section 4 designs a set of corresponding steps of detecting and removing the counterfeit signals.
Section 5 simulates the spoofing and verifies the effectiveness of the proposed algorithm. Finally, the work in this paper is summarized in
Section 6.
2. A Repeater and the Spoofing Rebroadcasted by It
In most cases, the counterfeit signals generated by a satellite signal simulator are not overlapped effectively with the authentic signals present in the space in which the receiver is located. If the counterfeit signal and the authentic signal correspond to the same satellite, and the code phase difference between them is less than
chips, then the overlapping of the two signals is considered to be effective in this paper, where
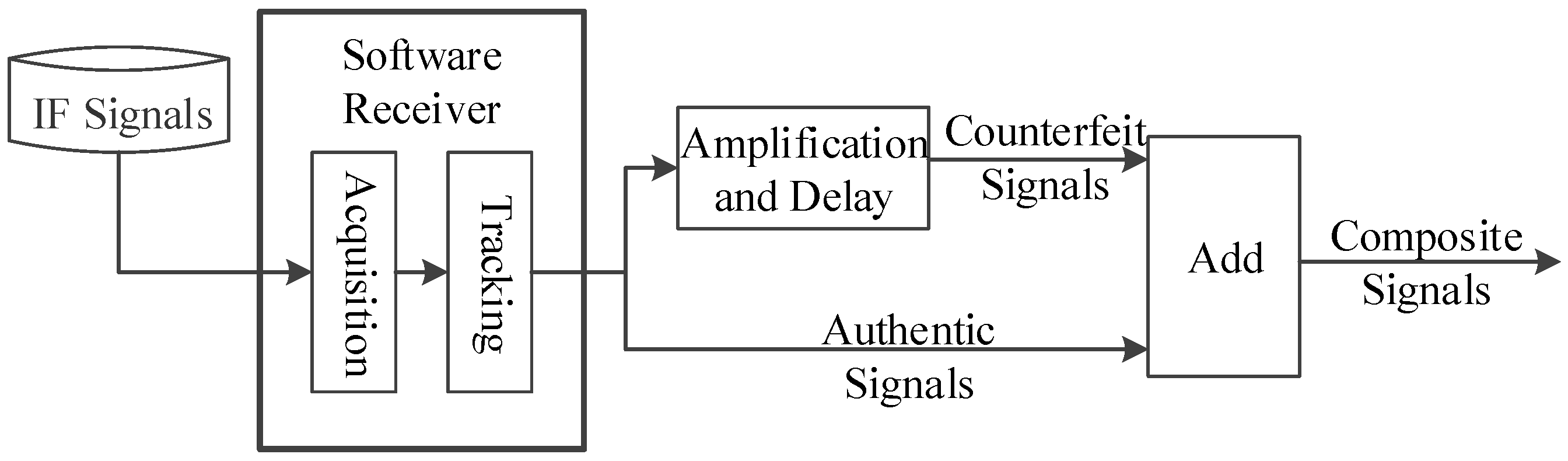
is the spacing between early and prompt correlators (or the spacing between prompt and late correlators) of the code loop. The autocorrelation and cross-correlation properties of C/A codes mean that the counterfeit signal is equivalent to the noise for the receiver channel which locks the authentic signal, i.e., it is difficult for the simplistic spoofing to affect the positioning results of the tracking receiver. By contrast, the spoofing executed by the repeater can affect the positioning results of the target receiver without reacquisition. As shown in
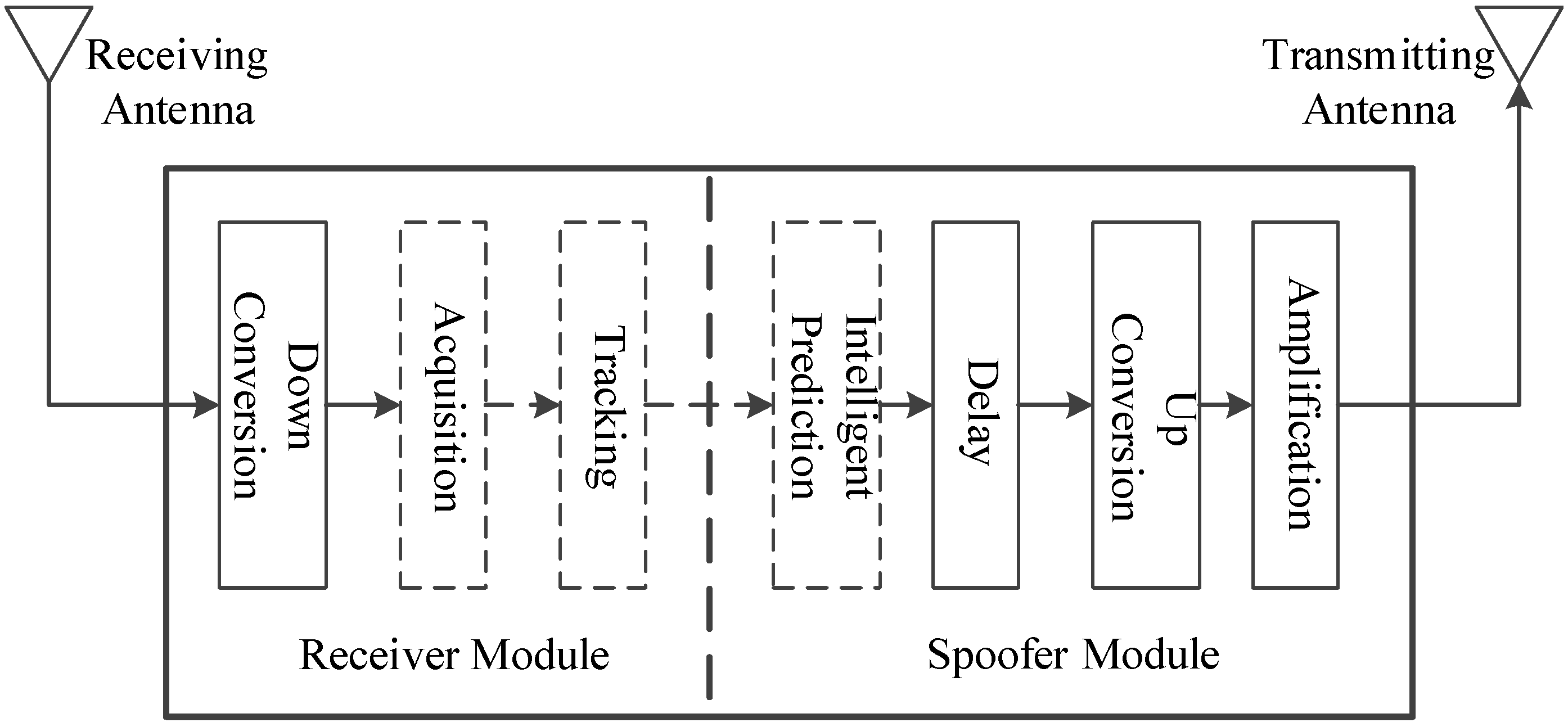
Figure 1, the repeater consists of two modules, namely the receiver module and the spoofer module. The receiver module is the same with an ordinary GPS receiver. The spoofer module properly delays and amplifies the received authentic signals and rebroadcasts the resulting counterfeit signals toward the target receiver. In order to ensure that counterfeit signals are effectively overlapped with the authentic signals, the repeater needs to know the approximate location of the target receiver to determine the appropriate time delay. Since the size of the repeater is usually small, it can be inconspicuously deployed near the target receiver, which facilitates the execution of spoofing [
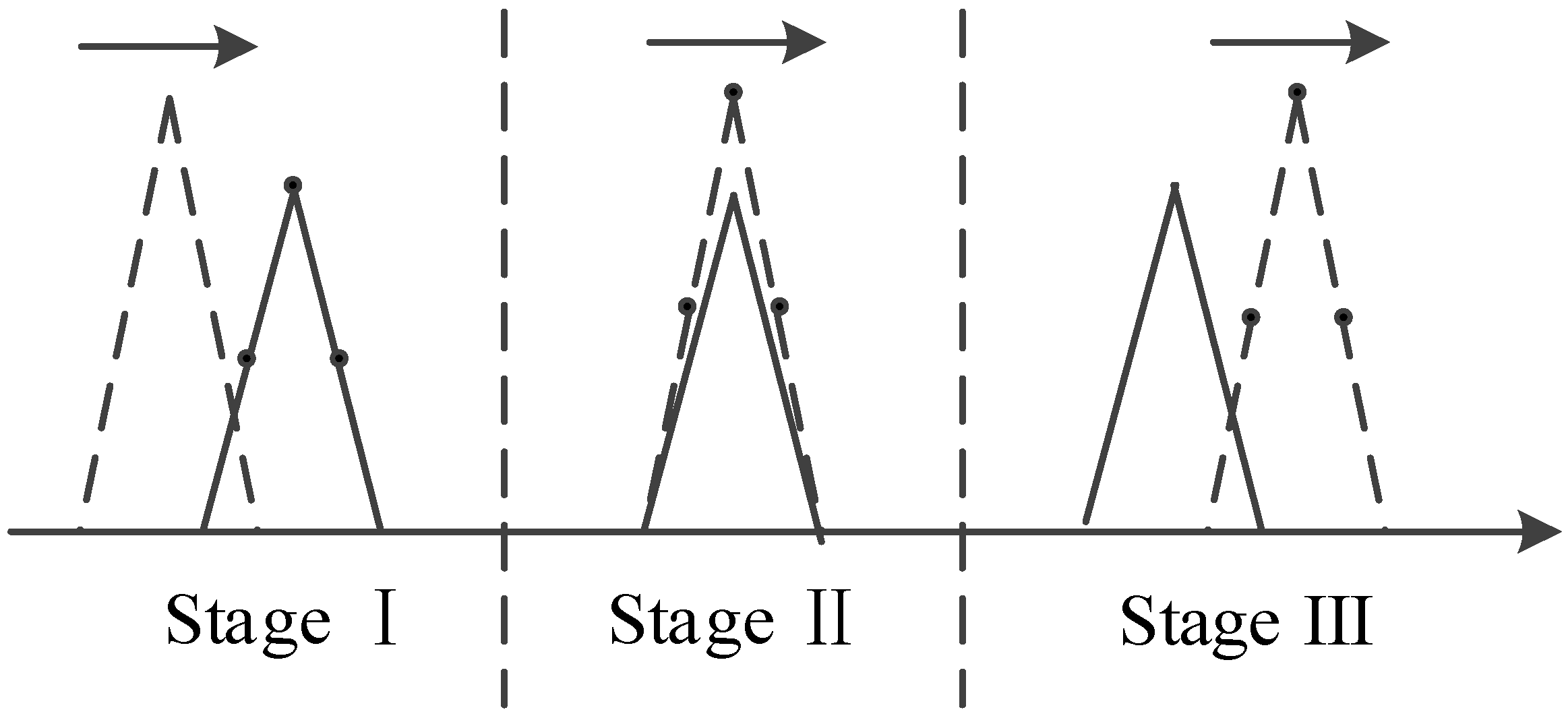
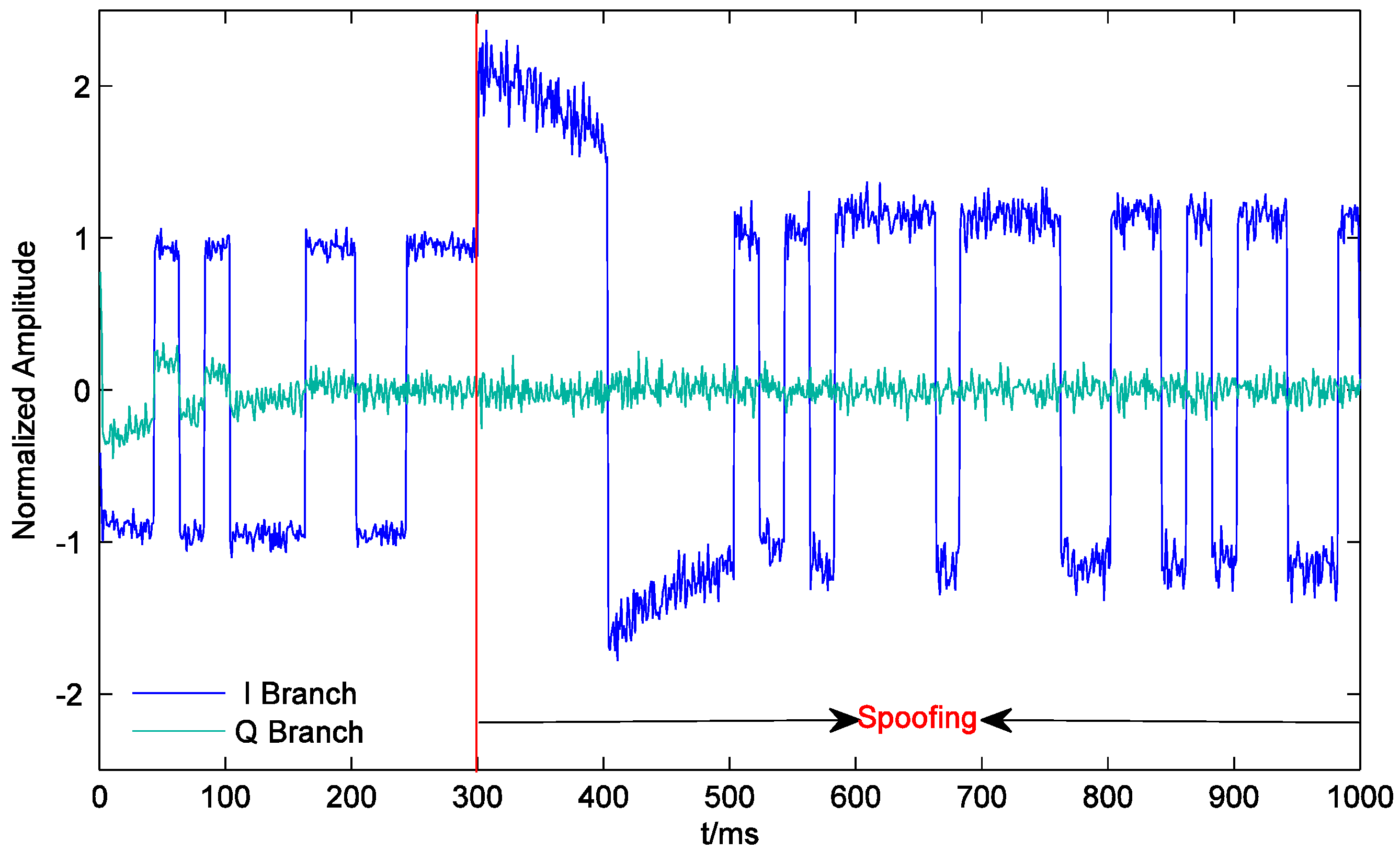
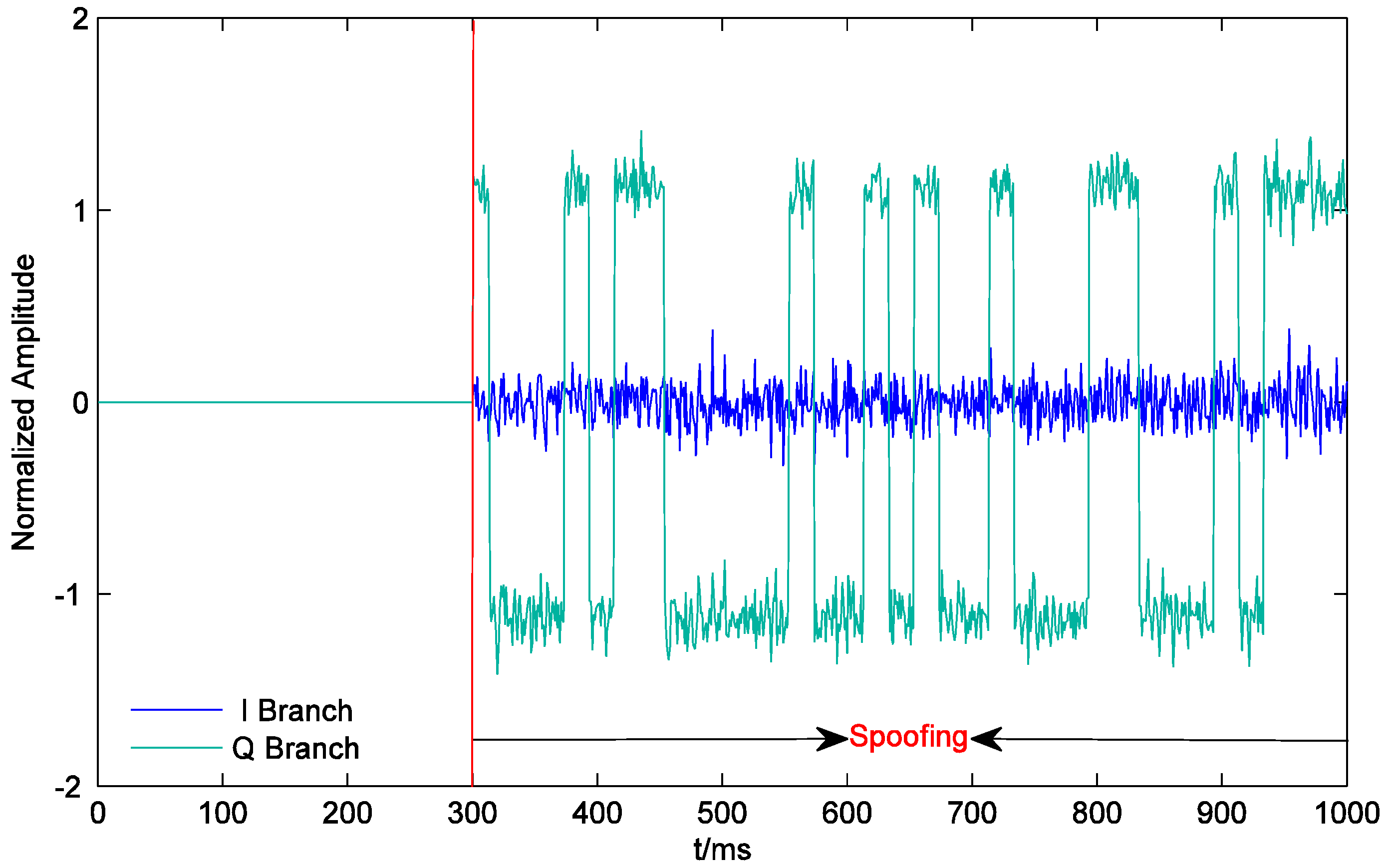
1]. Since it is easy for the simplistic spoofing to be handled, the spoofing mentioned subsequently in this paper is always executed by the repeater and has the form shown in
Figure 2. The correlation peaks of the counterfeit signal and the authentic signal have successively gone through three stages: approaching, effective overlapping, and moving away. The amplitude of the counterfeit signal is higher than that of the authentic signal throughout the process. In fact, as long as
is greater than 1.1, the target receiver will gradually lose its lock on the authentic signal [
16].
is the power ratio of the counterfeit signal to the authentic signal.
3. Construction of Multi-Correlators and Maximum Likelihood Rstimation of Dignal Parameters
In order to achieve the mitigation of spoofing, we employ the idea of multipath estimation. Firstly, in the presence of spoofing, the composite signals for the in-phase (I) and quadrature (Q) branches of any channel of the target receiver can be modeled as
respectively, where
is the known amplitude of the authentic signal,
is the navigation data bit,
is the CA code,
is the number of counterfeit signals in the current channel,
,
and
denote the noises in the I and Q branches, respectively.
,
,
are the amplification coefficient of the amplitude, code delay (time delay) and carrier phase corresponding to the
n-th signal, respectively. If
, they correspond to the authentic signal and
. Otherwise, they correspond to the counterfeit signals and
. In reality, the repeater delays and amplifies the authentic signal, and then rebroadcasts it. This principle determines that there is usually only one counterfeit signal corresponding to each satellite, namely,
. Although the counterfeit signals for spoofing can be ahead of the authentic signal, we assume
by symmetry in order to facilitate the discussion.
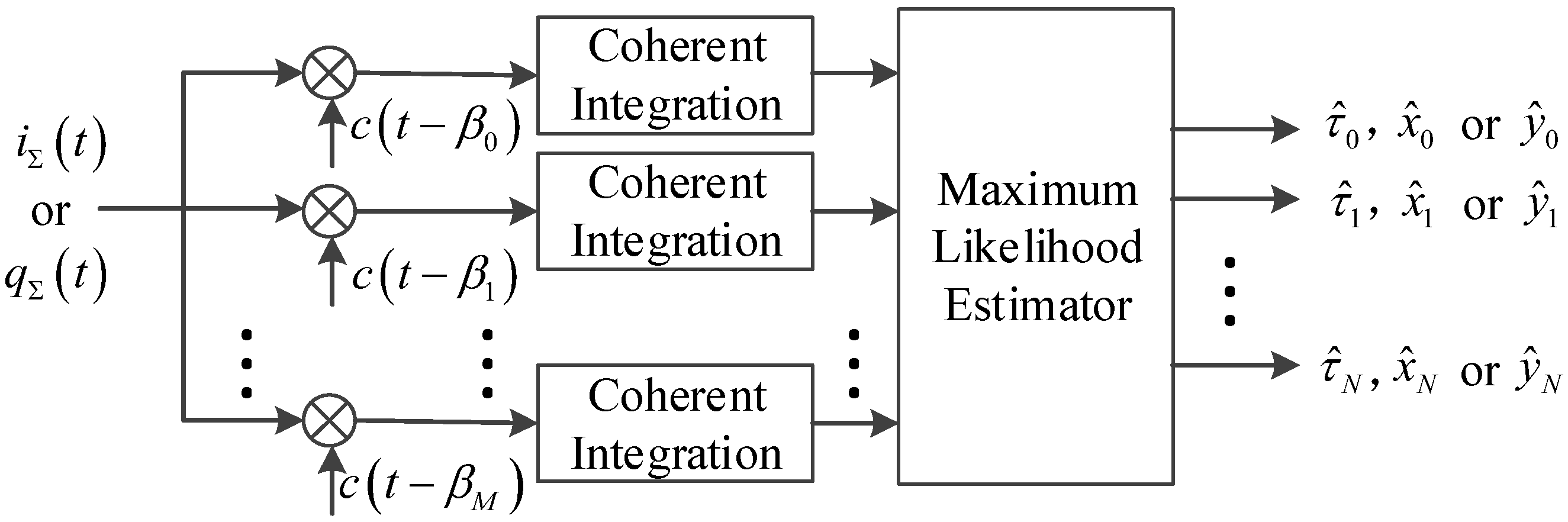
As shown in
Figure 3, a series of correlators whose time delays are
is deployed in the channel. Take the I branch for example, the composite signal is correlated with these correlators. It is assumed that the variations of
,
and
are negligible and
does not flip in the coherent integration time of
. Then the result of this coherent integration can be expressed as
where
is the index of the discretized sampling time
,
is the autocorrelation function of the CA code,
, and
Similarly, the expressions for the quadrature branch are written as
Assume that
and
are white Gaussian noises with zero mean and variance
, then
and
are white Gaussian noises with
where
,
.
Take the I branch for instance and ignore
. Equation (3) can be extended to a matrix form as
where
and the covariance matrix of
is
, where
It is handy that the observation vector follows a Gauss distribution, namely .
It can be assumed that
is known to facilitate the estimation of signal parameters. In this case, only linear problems need to be solved. Actually,
can hardly be consistent with our assumption. In this case, some additional strategies are needed to estimate
. See Step 3 in
Section 4 for more details. The probability distribution function (PDF) of
given
can be expressed as
Furthermore, we select the following ML function
Then, the ML estimate of
[
22] is
Similarly, the ML estimate of
for the quadrature branch can be obtained as
where
.
It can be drawn from the above derivations that
must be no less than
. In particular, it is possible that
and
are equal to
, respectively. In this setting, Equations (18) and (19) can be simplified as
When the time delay of a counterfeit signal equals , only the sum of squares of and is not obviously close to 0 regardless of the authentic signal. Other cases and the specific deployment of multiple-correlators will be explained in detail in the next section.
4. Detection and Removal of Counterfeit Signals
Since a wide correlator with 0.5 chips spacing between early and prompt correlators (or the spacing between prompt and late correlators) of the code loop is vulnerable to multipath effects or similar spoofing, the spacing
is typically set to 0.5 chips to validate the effectiveness of the proposed anti-spoofing method. It is assumed that the target receiver has locked authentic signals before spoofing is applied. It is well-known that the carrier frequency difference between the counterfeit signal and its corresponding authentic signal makes spoofing very easy to be detected. Since the repeater and the target receiver are usually very close, the repeater obtains the carrier frequency of the authentic signal before delaying and amplifying the authentic signal. As a result, the carrier frequency of the counterfeit signal rebroadcasted by the repeater is close to that of the authentic signal received by the target receiver. Hence, the carrier frequencies of the counterfeit signal and its corresponding authentic signal are set to be the same [
19]. The counterfeit signal is effectively overlapped with the authentic signal only when the distance between the correlation peaks of the two signals is less than 1.5 chips. If the distance between the correlation peaks of the counterfeit signal and the authentic signal is greater than 1.5 chips, then the counterfeit signal is considered to have a long delay. This kind of counterfeit signal cannot directly affect the result of the code phase discriminator, but the partial energy of its correlation peak may stimulate a number of correlators with long time delays in the multi-correlator structure. Accordingly, this will adversely affect the estimation of signal parameters and lead to erroneous restoring of the authentic signal. Therefore, the multi-correlator structure should have self-checking capabilities, i.e., it should be able to detect whether the counterfeit signal has a long delay to help the receiver to take reasonable countermeasures in the face of spoofing at different stages (see
Figure 2). For these reasons, we let
and note that
are equal to
, respectively.
are set to
chips, respectively, where
.
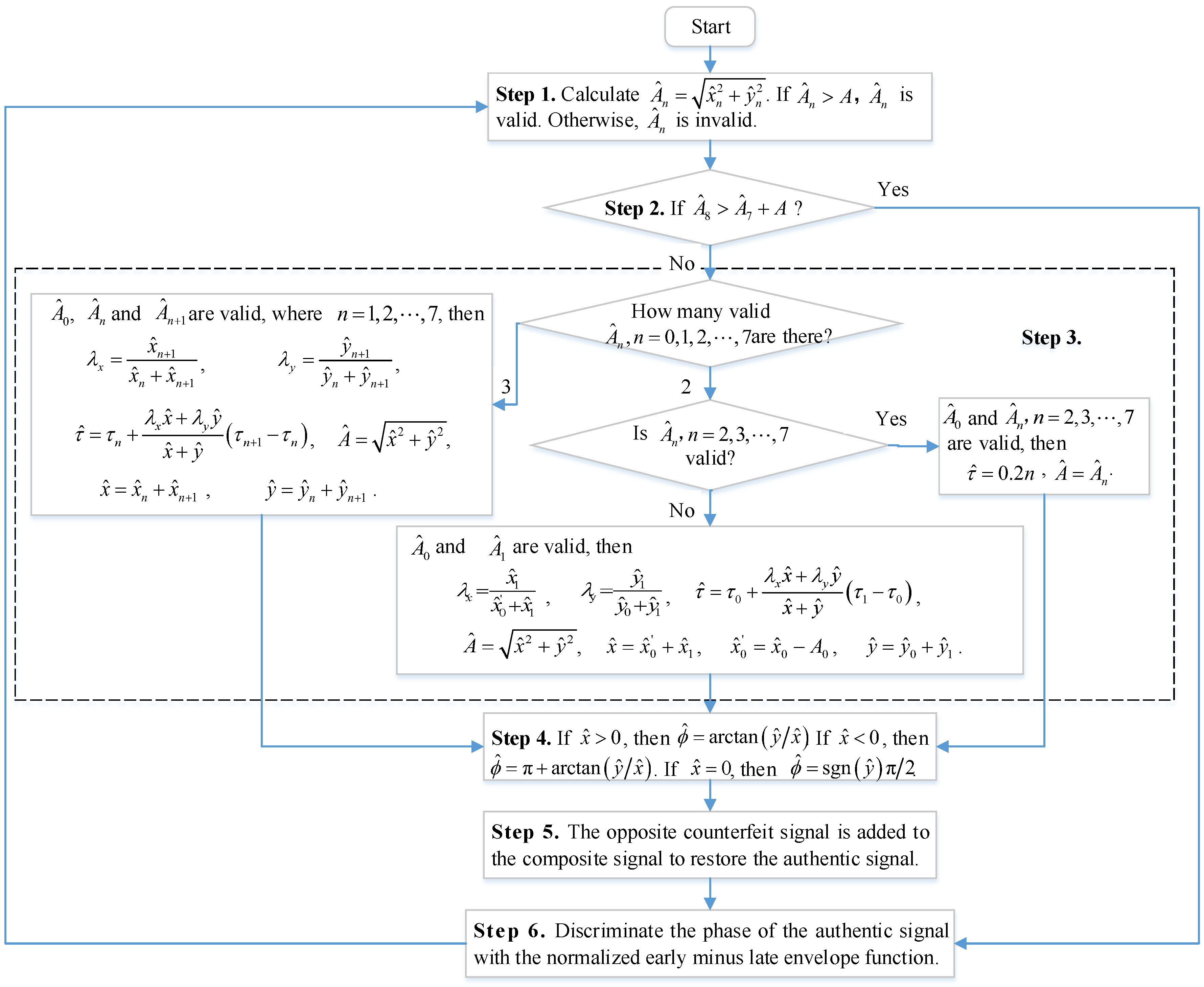
The time delays of the counterfeit signals for spoofing are usually not equal to those of the deployed multi-correlator. Detection and removal of counterfeit signals should be carried out according to the following steps.
Step 1: Determine whether the signal amplitude of the n-th correlator is valid.
According to Equations (20) and (21), the estimated and are obtained as and and denotes the estimate of . In order to facilitate the discussion, is termed as the signal amplitude of the n-th correlator. We choose the value of threshold based on the carrier-to-noise ratio of the authentic signal. That is, the value of is set according to , which can be obtained from the stimulation of the authentic signal to the first correlator based on the assumption that the target receiver locks authentic signals in advance. If , is valid. Otherwise, is invalid.
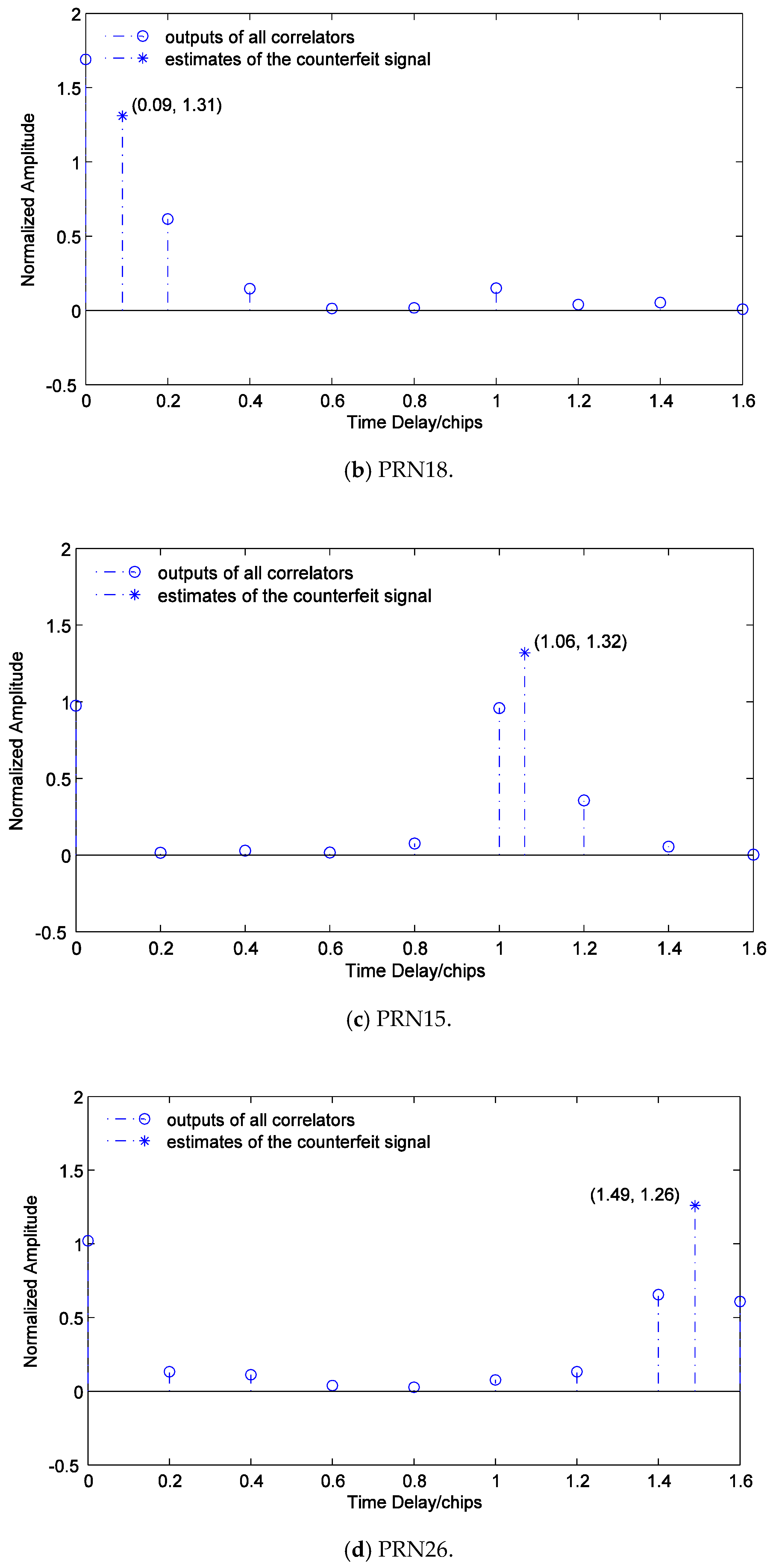
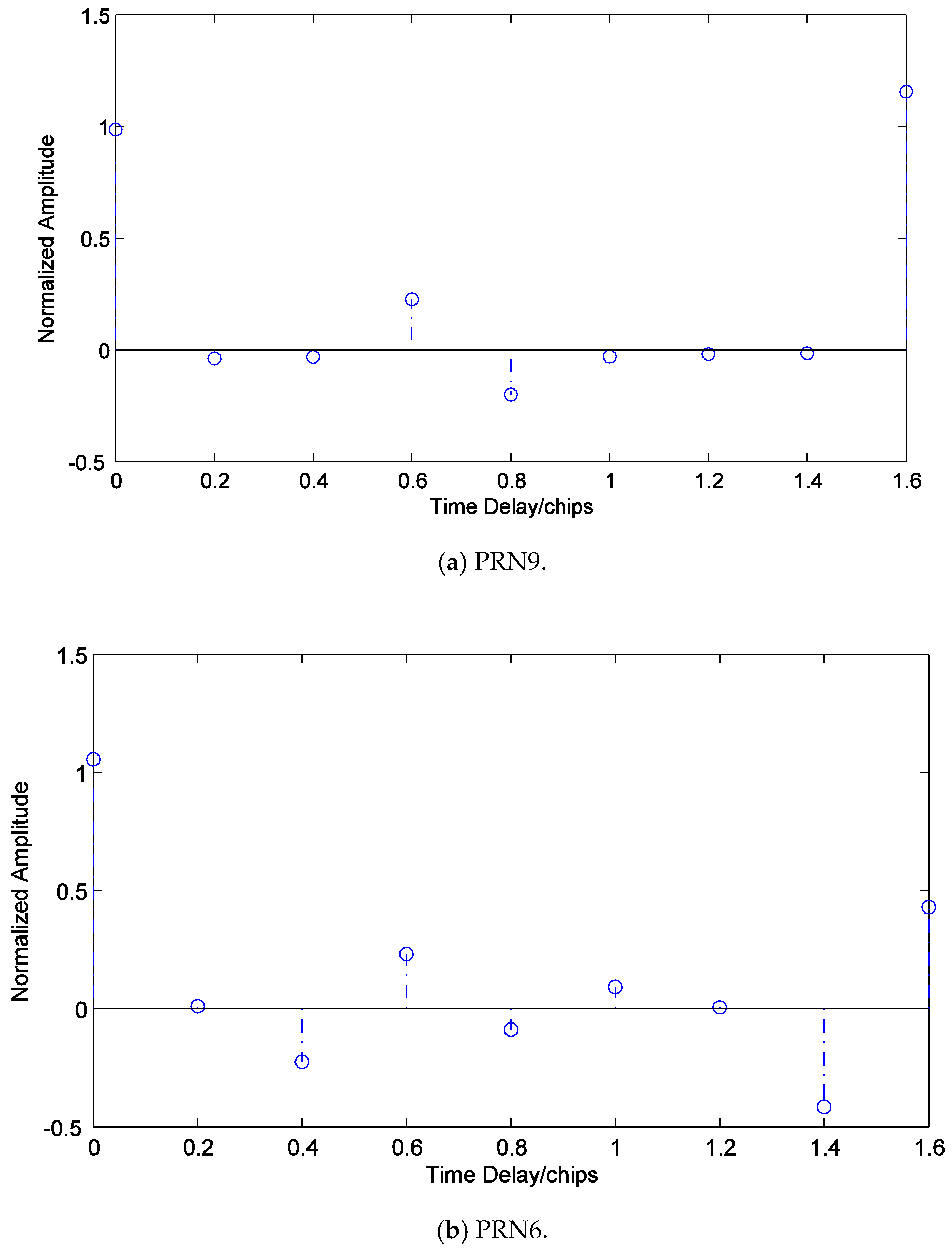
Step 2: Determine whether the counterfeit signal has a long delay.
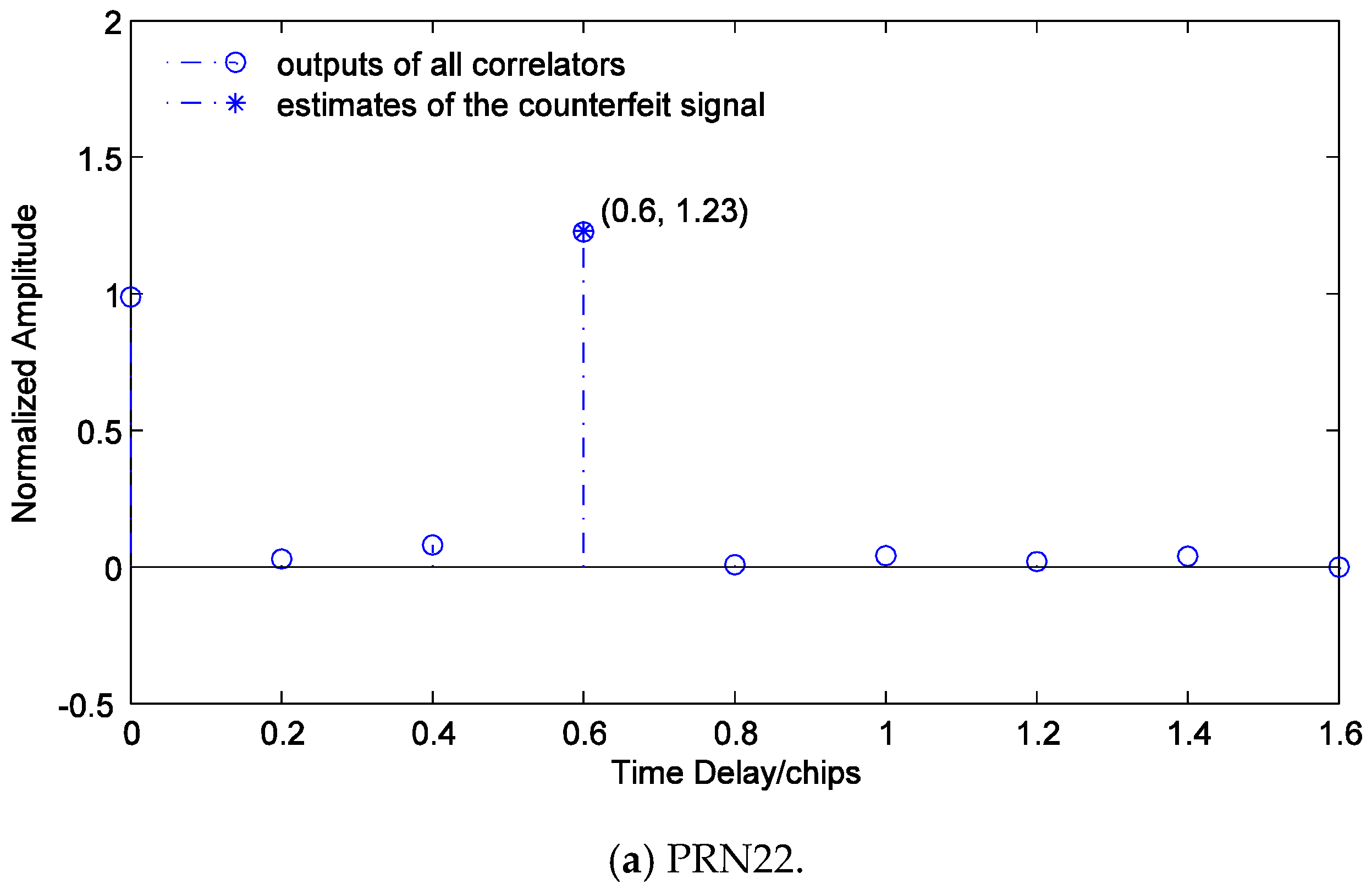
If the counterfeit signal has a long delay, the correlation peak of the counterfeit signal is closest to that of the correlator with a time delay of 1.6 chips. The stimulating effect on this correlator is also the most significant. Hence, if , the counterfeit signal is considered to have a long delay and not to be overlapped effectively with the authentic signal. Then go to Step 6. Otherwise, countinue to Step 3. More details on determining whether the counterfeit signal has a long delay will be further explained in the following experiments.
Step 3: Determine the time delay and amplitude of the counterfeit signal.
In practice, there is usually only one counterfeit signal in any channel. In this case, besides
, the signal amplitude(s) of one single correlator or two adjacent correlators will be valid. Based on this assumption, if
,
and
are valid, where
, then
Generally,
, so we have
where
and
are the estimated amplitudes of the I branch and the Q branch of the counterfeit signal, respectively and
If only
and
are valid, then the estimated time delay
of the counterfeit signal is equal to
chips and the estimated amplitude
is equal to
, where
. If only
and
are valid, then
chips. Eliminating the effect of the authentic signal on the estimated amplitude of the first correlator in the I branch, we have from Equation (26)
where
. Afterwards,
and
can still be obtained using Equations (24) and (25).
If the above assumptions are not valid, it is indicated that the effect of noise is significant or there is more than one counterfeit signal in the current channel. In this scenario, we can either deploy additional correlators near the correlators whose signal amplitudes are valid to calculate and , or just skip the calculation of and such that the authentic signal is directly restored with the valid signal amplitudes. Since this situation is rare, it will not be detailed here.
Step 4: Determine the carrier phase of the counterfeit signal.
In the process of determining the time delay and amplitude of the counterfeit signal, the calculations of and are involved in different cases. It should be pointed out that the of the authentic signals used in the experiments are relatively high. Correspondingly, the counterfeit signals whose power is slightly higher than that of their corresponding authentic signals also have relatively high . Therefore, based on , the estimated carrier phase of the counterfeit signal can be obtained in three cases. If , . If , . If , .
Step 5: Remove the counterfeit signal.
After detecting the time delay, amplitude and carrier phase of the counterfeit signal, the counterfeit signal is confirmed to have a short delay. The opposite counterfeit signal is added to the composite signal to restore the authentic signal. It is worth noting that the assumption of locking the authentic signal in advance can prevent us from mistakenly removing the authentic signal.
Step 6: Discriminate the phase of the authentic signal.
Discriminate the phase of the authentic signal with the normalized early minus late envelope function and go to the next loop.
The corresponding flow chart is shown in
Figure 4.
The whole process of detecting and removing the counterfeit signal is elaborated above. Due to the complexity and variability of deliberate interferences, it is very difficult for one single anti-spoofing method to properly handle all kinds of spoofing. For example, the anti-spoofing method based on the multi-correlator structure can help the tracking receiver to keep the authentic signal locked. However, if spoofing during acquisitionalready exists, this method will be incapable of distinguishing between the authentic and counterfeit signals of the receiver. Therefore, multiple anti-spoofing methods should be adopted in the receiver simultaneously [
18]. For instance, if the counterfeit signal corresponding to each satellite comes from a single interference source, the antenna can be moved along any small trajectory. In this case, the relative motion between the receiver and the repeater makes the variation of the carrier frequency of each counterfeit signal exactly the same. If the multi-correlator structure can detect the spoofing at the initial tracking stage, this method can be introduced to help the receiver determine whether the locked signal is the authentic signal. If spoofing with unlocked carrier frequency succeeds in spoofing the target receiver, significant abnormalities in the outputs of phase discriminators will be inevitable [
19]. In this case, this method can also be introduced to help the receiver determine whether it is necessary to enter the reacquisition stage. If the carrier frequency difference between the counterfeit signal and its corresponding authentic signal increases to a relatively large value, two distinct correlation peaks will appear at the reacquisition stage. That is, the spoofing degenerates into the simplistic form. In addition, other common anti-spoofing methods can also be used on the receiver to detect the simplistic spoofing earlier or more conveniently and ensure the correctness of the positioning results.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}