1. Introduction
The wavelet transforms are commonly used to analyse non-stationary signals and, as a result, there is a wide bibliography both generalist [
1,
2,
3,
4] and applied [
5,
6,
7]. The wavelet term is assigned to a set of time frequency transforms that depending on the selection of some parameters produces more specific definitions of wavelet transforms. The most utilized wavelet is the Discrete Wavelet Transform (DWT), which has the disadvantage of not being shift-invariant. The Undecimated Wavelet Transform (UWT) was designed to overcome the lack of the DWT time variance [
8]. There are several implementations of the UWT, for instance the à trous algorithm [
8], but this work deals with the technique called Cycle Spinning (CS) [
9].
The CS method has been used in the processing of different kinds of images: astronomical images [
10], synthetic aperture radar images [
11], medical images for diagnosis [
12] and for estimation of fluid flows [
13], or the classic image of Lena [
14]. However, CS has been also used for the extraction of signal characteristics from electrical discharges [
15], for denoising in electromagnetic signals from geophysical explorations [
16] or for denoising of ultrasonic signals used both for nondestructive evaluations [
17,
18] and for medical diagnosis [
19,
20].
The CS algorithm has some advantages over other wavelet implementations. The main advantage is that the final processed signal is obtained by the combination of different shifted versions of the processed signal. This characteristic produces a high redundancy of the processed information and allows different points of view, which can suggest different solutions, for instance the best basis selection in wavelet denoising problems. The redundancy of the processed information is intrinsic to the UWT, but the CS UWT technique is more redundant than other UWT techniques. For instance, the à trous algorithm generates
wavelet coefficients per sample whereas the CS algorithm generates
(being
the maximum decomposition level of the UWT analysis) [
18].
The UWT CS analysis is based on performing numerous DWTs to circular shifted versions of the signal to process, generating the CS coefficients. After the wavelet coefficients processing, the UWT CS synthesis is carried out performing several inverse DWTs (iDWT), resulting in a set of recovered signals that must be combined to obtain the final processed signal. The limitation of the CS method is the high number of DWTs and iDWTs to perform, and the reduction of the CS computational cost has been treated in several works. In References [
21,
22] it was demonstrated that the CS coefficients, obtained performing DWTs with maximum decomposition level
J, were periodic every
shifts. Recently in Reference [
18] the complete formulation of the CS coefficients was done and other periodicities of the CS coefficients were shown. These periodicities allowed the proposal of some alternatives to reduce the computational cost in the CS method. One of them was the Partial Cycling Spinning (PCS) method [
17,
19] that performs the CS method using only a subset of the circular shifted versions of the signal to process, reducing the number of DWTs and iDWTs.
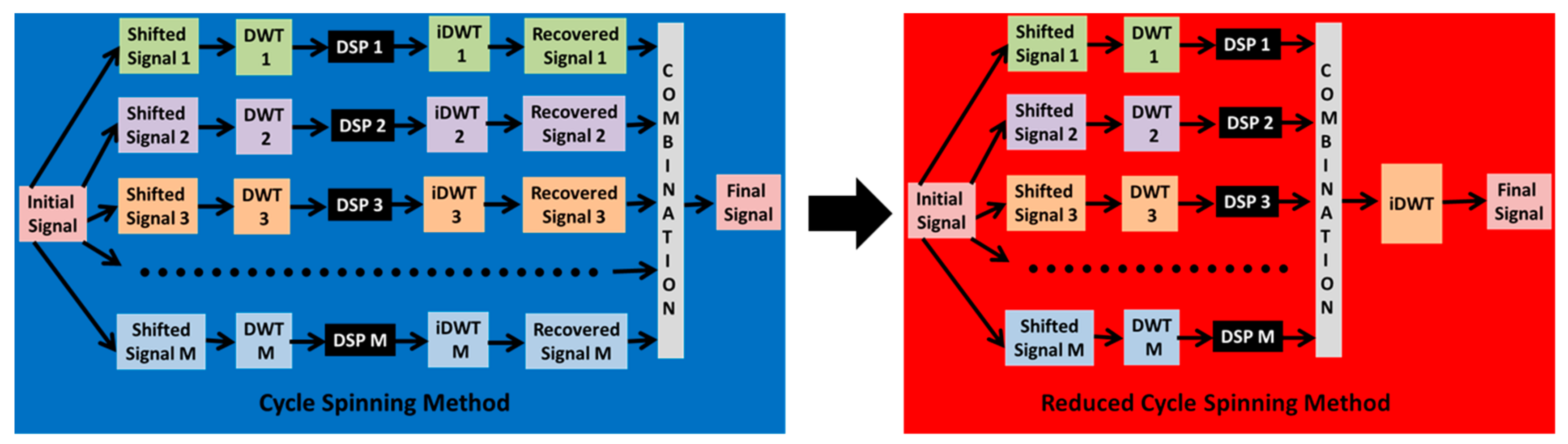
The present work introduces an improvement to the CS UWT implementation by removing all the iDWTs except one, reducing the computational cost. The improvement is obtained doing a combination of the wavelet coefficients, after the Digital Signal Processing (DSP) tap and prior to the iDWT tap. In this way, the combination is performed over the wavelet coefficients instead of over the recovered signals, reducing the number of iDWTs to one.
Figure 1 shows the schemes of the standard CS method and the proposed Reduced Cycle Spinning (RCS) method.
This work develops the mathematical formulation of the new RCS method, studies its advantages and limitations, evaluates different options for the wavelet coefficients combination and shows experimental results which validate the proposed method. The experimental validation is done by comparing the RCS method with the CS and the PCS methods applied to the denoising of ultrasonic signals. This paper is written in four parts:
Section 2 resumes the CS method;
Section 3 introduces the new RCS method;
Section 4 describes the simulations of an ultrasonic denoising problem and
Section 5 explains the conclusions.
2. Undecimated Wavelet Transform and Cycle Spinning
The Discrete Wavelet Transform (DWT) is defined by:
where
is the discrete signal,
the mother wavelet,
is the discrete time and
is the scale level.
The popularity of the DWT is in part due to its easy implementation with iterative filter banks using the Mallat algorithm [
23]. In the Mallat algorithm the input signal passes through two filters (a low pass filter and a high pass filter) and the outputs of the filters are decimated. The output of the high pass filter is formed by the wavelet coefficients and the output of the low pass filter is the input of the filtering Level 2, which uses the same filter bank as Level 1. Repeating this filtering-decimating process, the wavelet coefficients are obtained for all the decomposition levels.
Figure 2 shows the Mallat DWT analysis algorithm. The input
is the z-transform of
,
and
are the transfer functions of the low pass and high pass filters, the blocks with (2↓) represent the decimation by 2,
are the wavelet coefficients at the decomposition level
and
are the coefficients from the output of low pass filter of level
.
The number of wavelet coefficients obtained by the Mallat algorithm is coincident with the number of samples of the input signal
,
K samples. The expressions of the DWT coefficients are [
3]:
The synthesis of the signal from the wavelet coefficients can be obtained using another filter bank, where two new low and high filters,
and
(obtained from
and
), are utilized and where the decimator is replaced by an interpolator. The expression of the recovered signal is:
The DWT is not a shift-invariant transform because the wavelet coefficients of level
are calculated with periods of
samples [
8]. To overcome this problem was developed the Undecimated Wavelet Transform (UWT) that is an invariant-shift transform [
8].
There are two widely used algorithms for the implementation of the UWT: the à trous algorithm [
8] and the CS method [
9]; the relationship among them was studied in Reference [
18].
The CS algorithm is based on the DWTs of several circular shifted versions of the input signal
. Therefore, it is necessary to calculate a DWT for each shifted version of the input signal. The shifted versions of the input signal,
are obtained using the shift operator
[
18].
with
and
, being
the shift and
.
because the CS UWT coefficients are periodic every
shifts [
21,
22], thus if
is increased the wavelet coefficient obtained are periodically repeated.
In the z-transform domain the shift operator
is transformed to
and the shifted signals can be expressed as:
Figure 3 shows the UWT analysis scheme using CS with maximum decomposition level
. The output of the CS analysis is composed of the wavelet coefficients of
DWTs, so the total number of coefficients is
. The expressions of the CS wavelet coefficients are:
with
and
.
The synthesis of the recovered signal
from the CS wavelet coefficients is carried out by means of several parallel iDWT’s processes, followed by the inverse shifts that compensate the ones performed during the analysis process (see
Figure 4). In this way, if the wavelet coefficients have not been modified, the signals recovered for each shift,
, are equal to the original signal
. In fact, with the CS method,
processed versions
of the original signal
are obtained.
Using the Equation (5),
can be written as:
Finally, the recovered signal
is obtained by combining the different signals
using the mean. The
Figure 4 show the complete diagram block of the CS synthesis process.
An alternative to reduce the number of shifts
is the PCS method. The PCS method introduced in References [
17,
18,
19] is an approximation of the CS method with a reduced number of shifts,
. The PCS method selects a subset of the shifts and performs the UWT in a similar way to the CS method. The quality of the results obtained with the PCS method depends on the selected subset of shifts, but with an adequate selection of the shifts the quality of the processed signal is maintained. The PCS method can obtain good results with
, reducing the number of shifts from
to
, and obtaining a computational cost reduction by a factor of approximately
. The PCS method optimizes the CS method maintaining the same block diagrams both in analysis and synthesis, but reducing the number of shifts (
); the RCS method presented in this work optimizes the CS method using a new synthesis block diagram with only one iDWT.
3. Reduced Cycling Spinning (RCS) Method.
The CS algorithm needs a high number of DWTs and iDWTs, one DWT and one iDWT for each signal shift. The number of operations performed in each DWT or iDWT is approximately
, with
being a constant factor that depends on the filter length and
the number of samples of the input signal
. Therefore, for the implementation of the CS method with
shifts the number of needed operations is approximately
,
for the analysis tap and
for the synthesis tap. If all the possible shifts are performed,
, the number of operations would be approximately
. Different methods based on the selection of a limited number of shifts have been proposed to reduce the order of the CS operations from
to
[
10,
17,
19]. The proposed RCS method eliminates all iDWTs except one, reducing the operations in the synthesis from
to
. The RCS method maintains the CS analysis tap and proposes a new synthesis process, implying approximately
operations. Therefore, the RCS method reduces the number of operations from
to
, very close to the half value. In addition, the RCS method can be combined with other approximated CS methods as the ones proposed in References [
10,
17,
19] increasing the computational cost reduction.
In the RCS synthesis the combination of the shifted wavelet coefficients is performed prior to the iDWT and implies some difficulties. The CS synthesis only needs to perform one inverse shift for each shift performed in the analysis block, but the RCS synthesis needs to perform several inverse shifts for each shift performed in the analysis block because the shifts associated to the wavelet coefficients vary depending on the decomposition levels due to decimators. A shift
in the initial signal
generates a shift of
in the coefficients
, a shift of
in the coefficients
, and in general a shift of
in the coefficients
. In this way, to compensate for the effects of a shift
over the wavelet coefficients it is necessary to perform an inverse shift
for scale 1, an inverse shift
for scale 2, and in general an inverse shift
for scale
.
On the other hand, the ratio
is not an integer in all cases and it is necessary to approximate the fractional shifts to an integer in order to perform the inverse coefficients shifts. The approximation of
to an integer is done by rounding, which is an easy operation and minimizes the maximum rounding shift error.
The rounding shift error assumed doing the approximation of Equation (11) is:
where
is an integer which value depends on
and varies between
and
.
The module of the maximum rounding shift error is bounded to 1/ for all the scales.
The rounding shift error
generates another error in the wavelet coefficients proportional to the
value. The approximated shifted coefficients,
) and
, can be expressed as the exact shifted coefficients,
and
, plus an error:
being
and
the errors of the wavelet coefficients.
The combination of the shifted coefficients is performed with the mean. Other alternatives for the combination (maximum and minimum) are evaluated in the experimental part, but results confirm the mean as the best option. The exact combined coefficients,
and
, that would be obtained using the exact and unavailable shifted coefficients,
) and
, have the expressions:
However, in practice the proposed RCS algorithm use the approximated shifted coefficients,
) and
, for combination and the resulting approximated combined wavelet coefficients
and
are:
The approximated coefficients
and
are the exact coefficients
and
plus the mean errors of the shifted wavelet coefficients,
and
. These mean errors depend on the coefficients values distribution and it is not possible to calculate them in a general way. However,
and
also depend on the mean of the rounding shift error the value of which is:
The mean rounding shift error, , has a low fixed value for each scale and decreases in an exponential way with the scale resulting negligible for many scales. As and depend on , it is possible to conclude that and also have low values, decrease in an exponential way with the scale and in many scales are negligible. In this way, the high scales errors affect a large number of samples of the recovered signals but they are very low, whereas the low scales errors could be more important but affect only a small number of samples of the recovered signals.
Finally, the signal
is recovered from the wavelet coefficients
and
with a unique iDWT.
The approximated recovered signal
is the exact recovered signal,
plus an error. The error in the recovered signal is:
The error depends on and , and depend on that has low values; so the error will have low values.
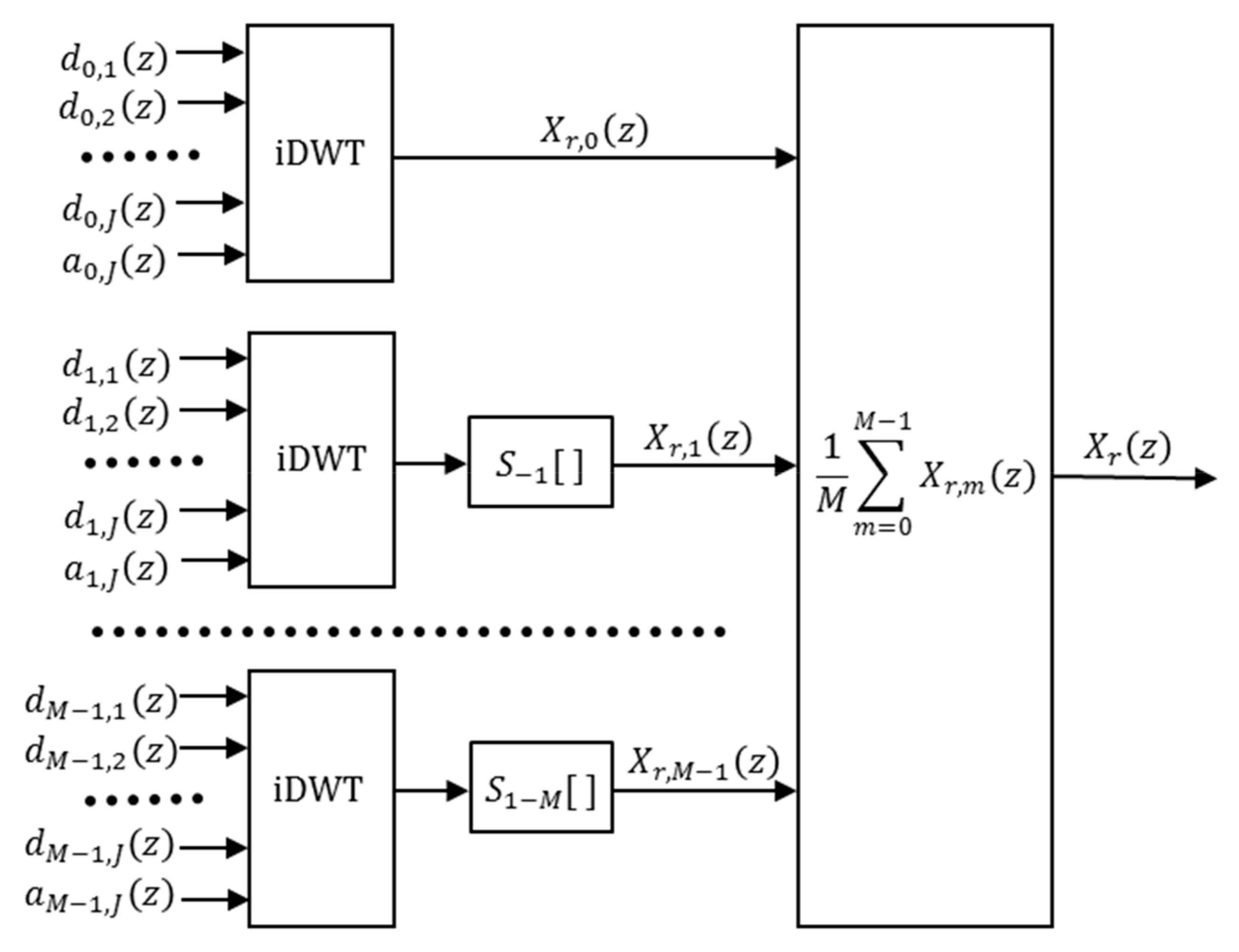
Figure 5 displays the block diagram of the complete RCS synthesis using the approximated wavelet coefficients.
5. Conclusions
This paper introduces the RCS method for the CS UWT implementation that reduces the computational cost by a factor close to 2 and is compatible with other optimized methods such as PCS. The proposed RCS method maintains the analysis blocks of the CS method but changes the synthesis tap reducing the number of iDWTs to one. For the iDWT’s reduction in the synthesis tap, it is necessary to perform a combination over the wavelet coefficients, instead of over the recovered signals as in the CS method.
The combination of the wavelet coefficients associated to each shift has implied the proposal of solutions to the difficulties that appeared during development. The main difficulty was due to the fact that the shifts have integer values in the shifted signals, but not in the CS wavelet coefficients because of the decimation process. To solve this problem and calculate the inverse shifts during the synthesis process, the shifts were rounded and a rounding shift error was generated. The rounding shift error was studied and its effects over the recovered signal were estimated. The error in the recovered signal depends on the mean value of the rounding shift error, and the mean value of the rounding shift error has been calculated resulting . Therefore, the error in the recovered signal is proportional to , negligible in most of the samples; the experimental results confirm this hypothesis.
The novelty of the proposed RCS method is the combination of the wavelet coefficients associated with each shift, so different alternatives for the coefficients combination have been studied. Specifically, the paper shows results using three alternatives for the coefficients combination: the mean, the maximum and the minimum. In denoising processing applications, the SNR and MSE values do not show big differences among the coefficients combination methods.
On the other hand, the graphical results of denoised ultrasonic traces show an interesting effect, the non-eliminated noise peaks are smaller using the RCS method with the mean than using RCS with the minimum or maximum. Additionally, there is a reduction of these noise peaks compared to the CS and PCS methods. The reduction of the non-eliminated noise peaks in RCS denoising must be studied to determinate the causes and to evaluate the effects of applying RCS to other signal processing problems.
The final conclusion is that this work introduces the RCS method for the CS UWT implementation with half the computational cost of the standard CS method, develops the RCS mathematical formulation, shows the block diagrams of the RCS analysis and synthesis taps, performs an experimental validation applying the RCS method to an ultrasonic denoising problem and evaluates the RCS errors.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}