A Predictive Guidance Obstacle Avoidance Algorithm for AUV in Unknown Environments


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Statement and Model Description
2.1. Problem Description
2.2. AUV Movement Model
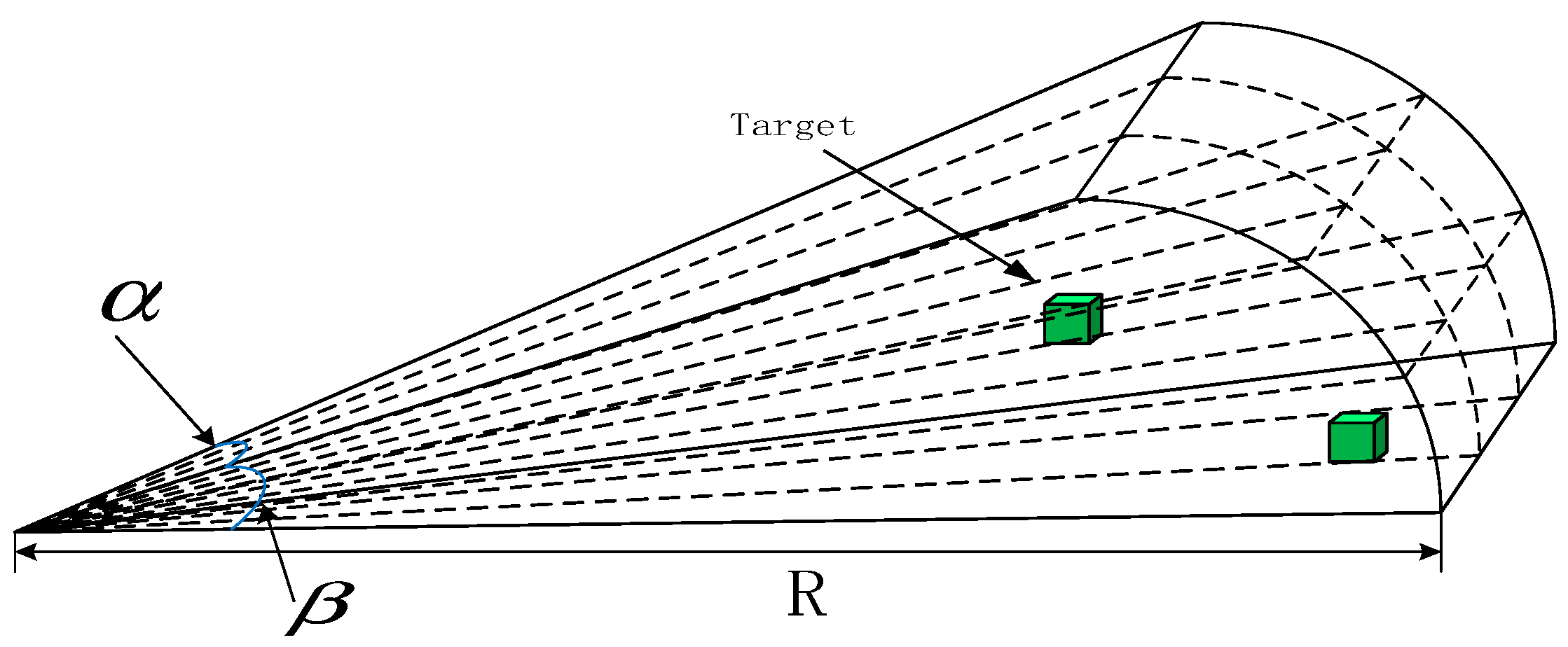
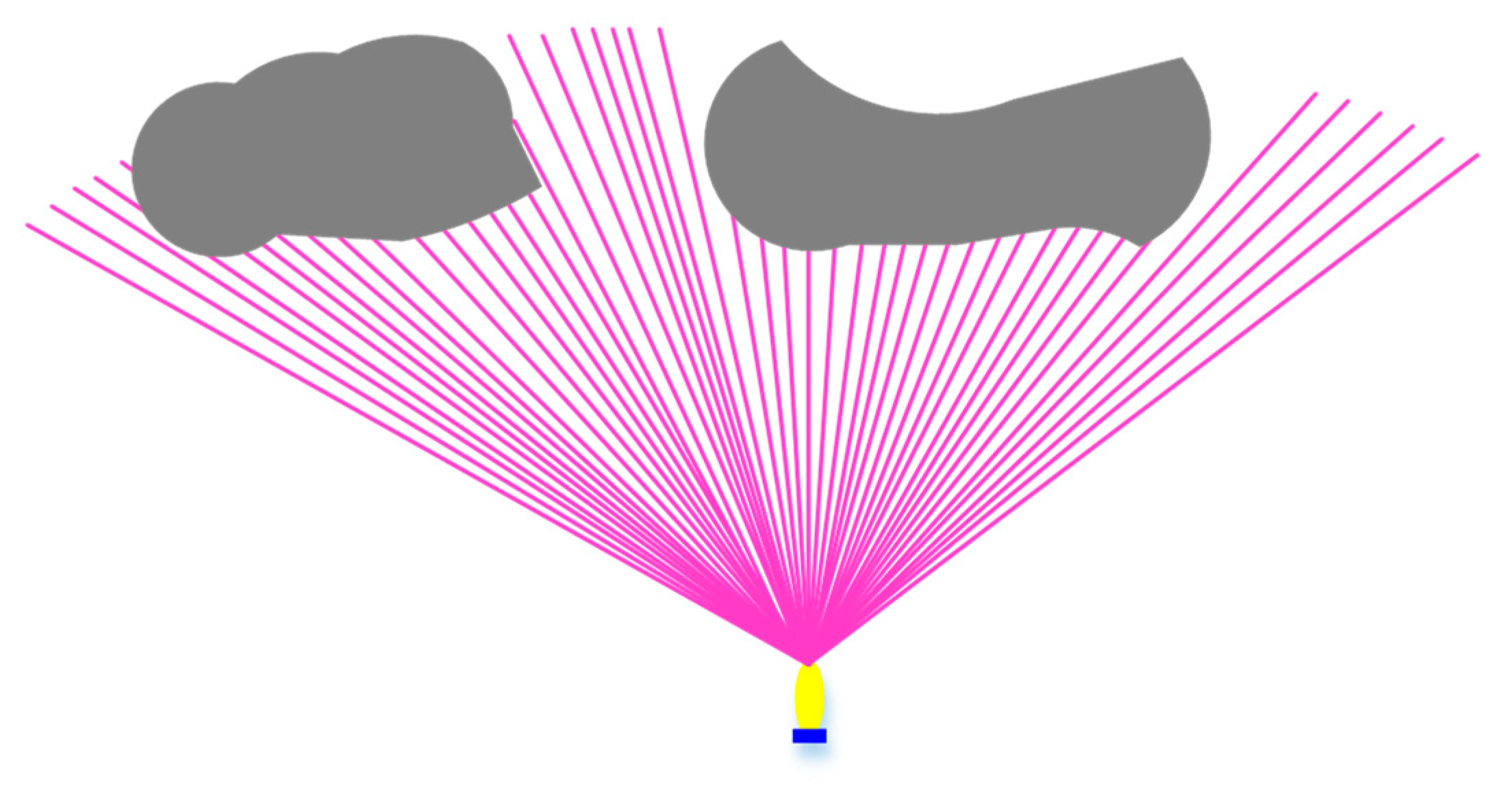
2.3. Forward-Looking Sonar Model
3. Classification of Obstacles and Solutions
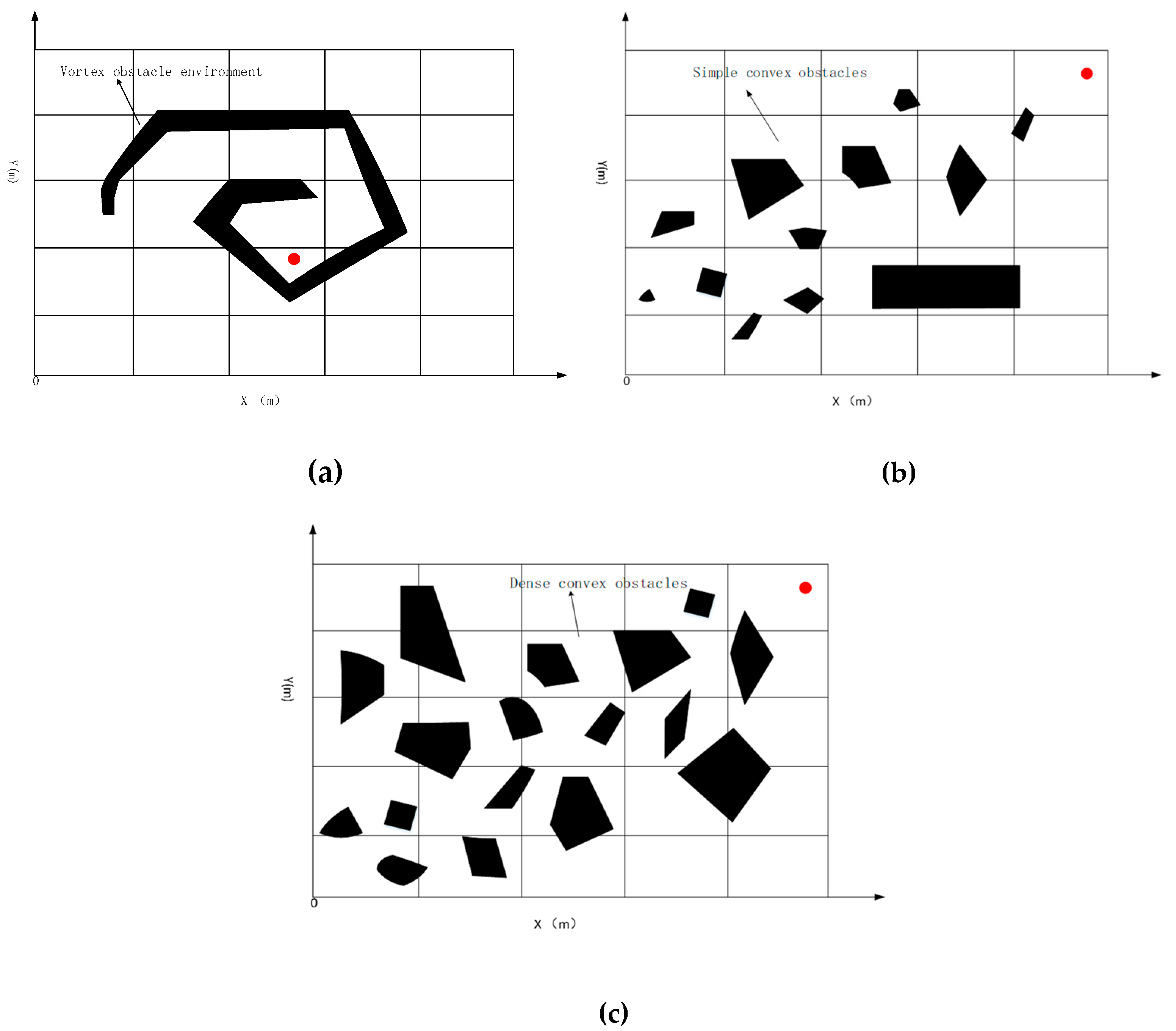
3.1. Type of Obstacles
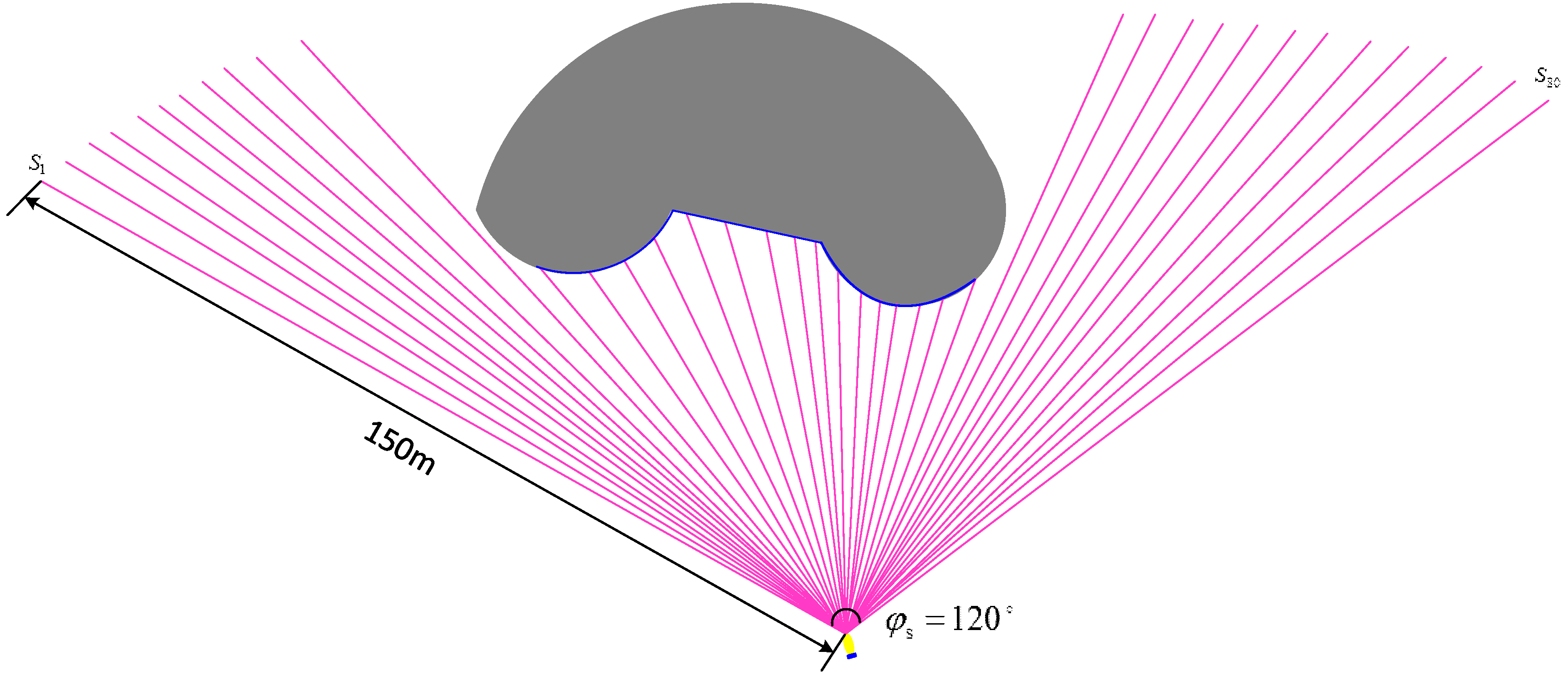
3.2. Obstacle Detection Principles
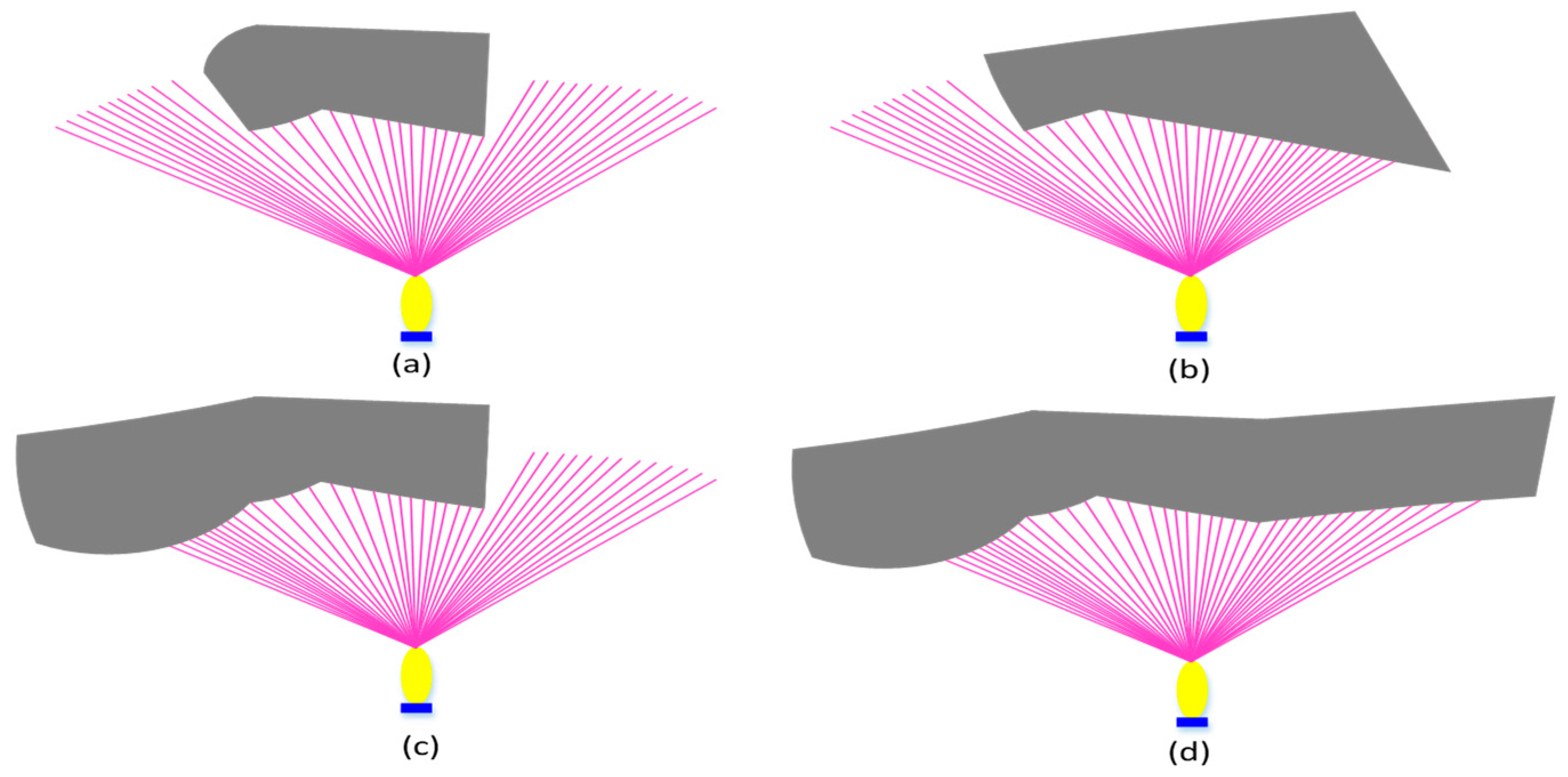
3.3. Obstacle Condition Classification
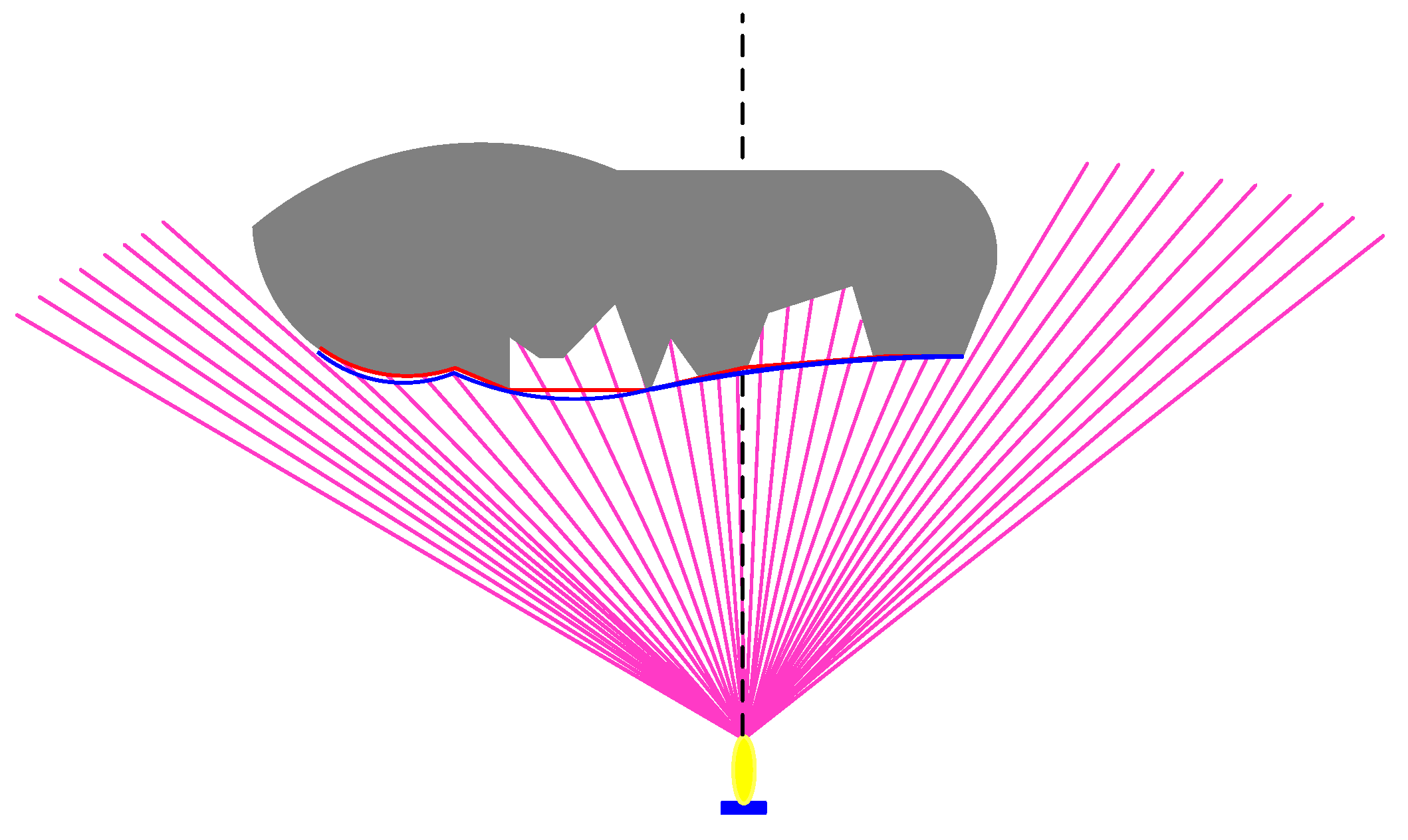
3.4. Obstacle Avoidance Boundary Data Processing
4. Predictive Guidance Obstacle Avoidance Algorithm Design
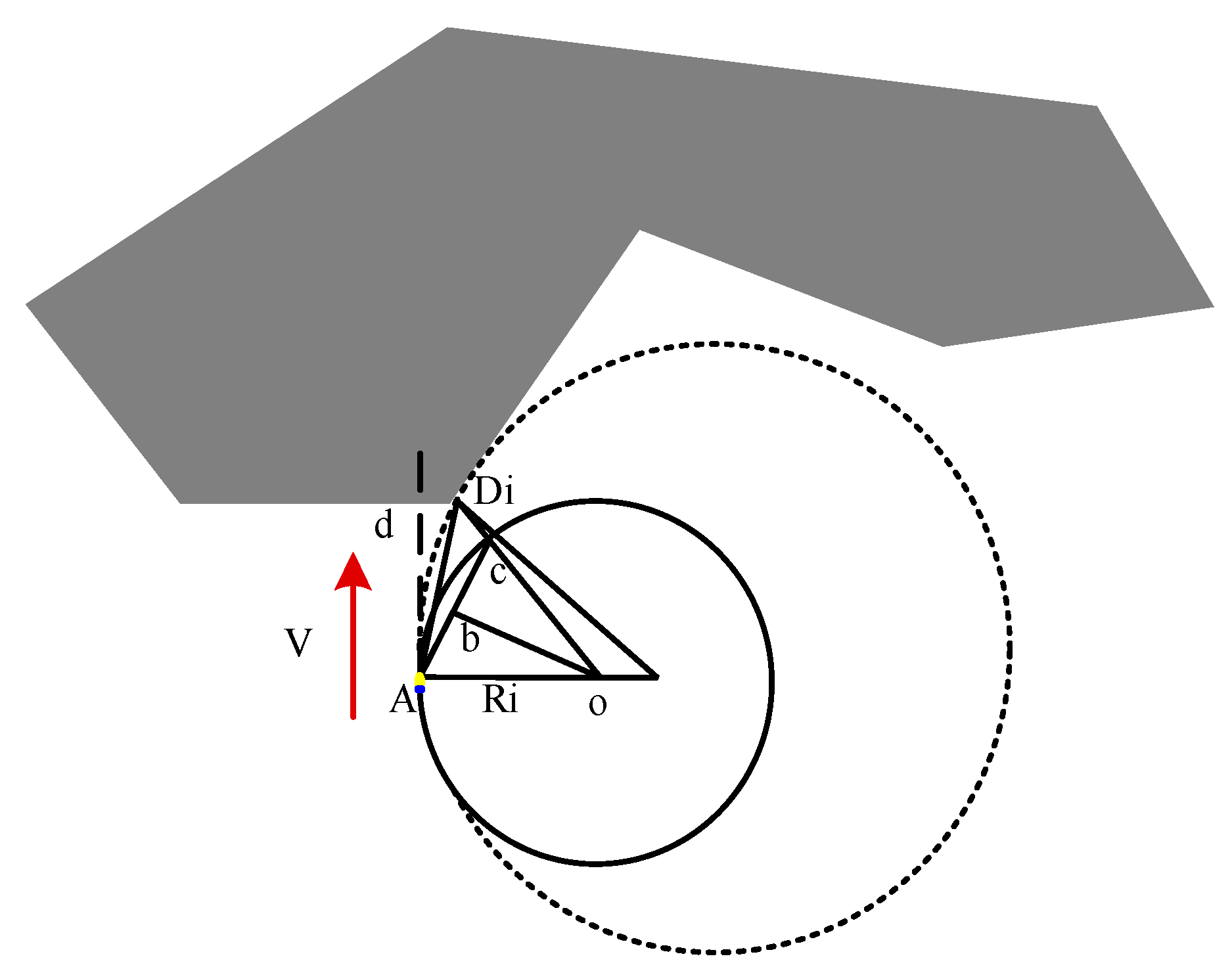
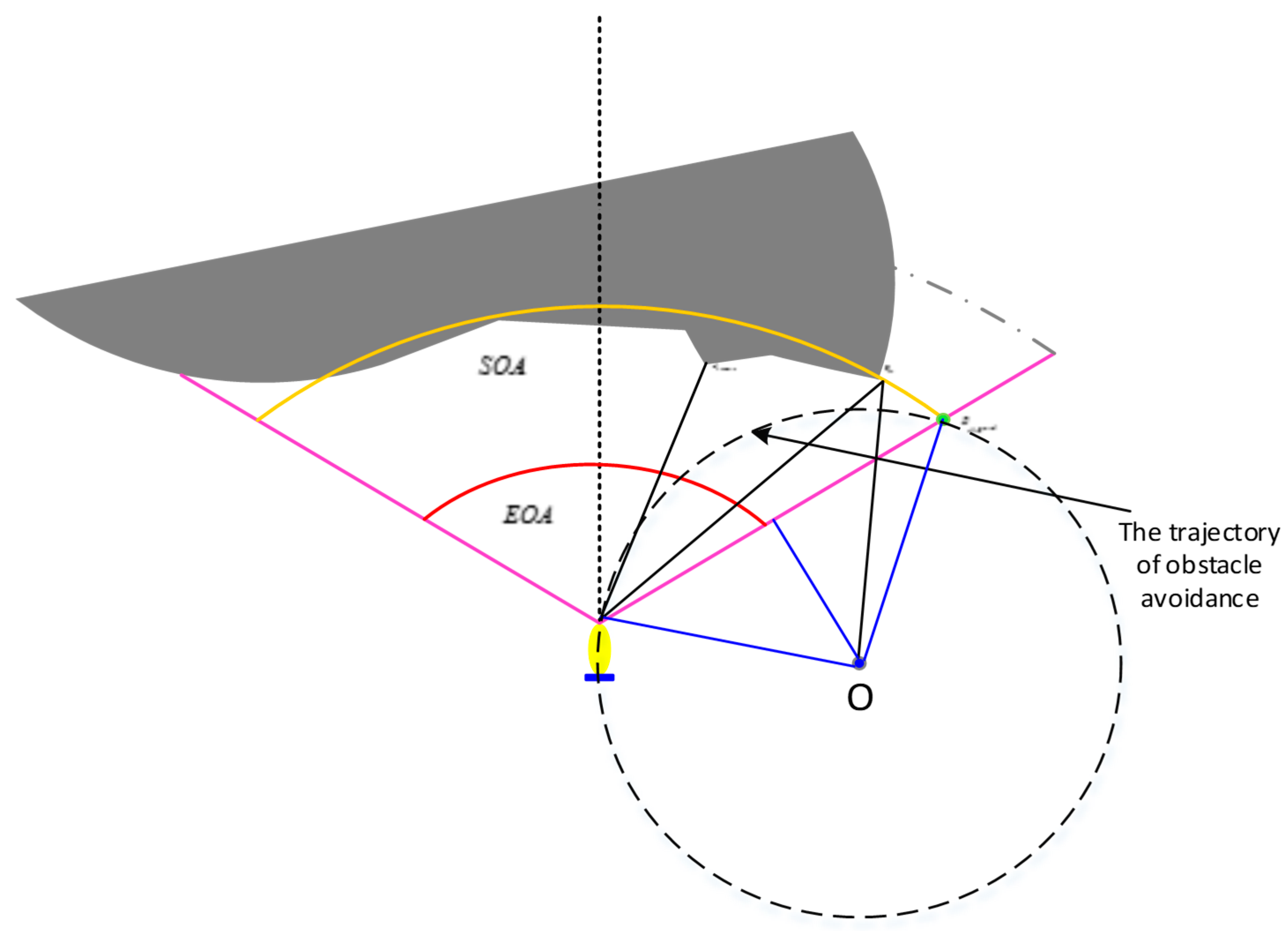
4.1. AUV Maximum Obstacle Avoidance Turning Radius
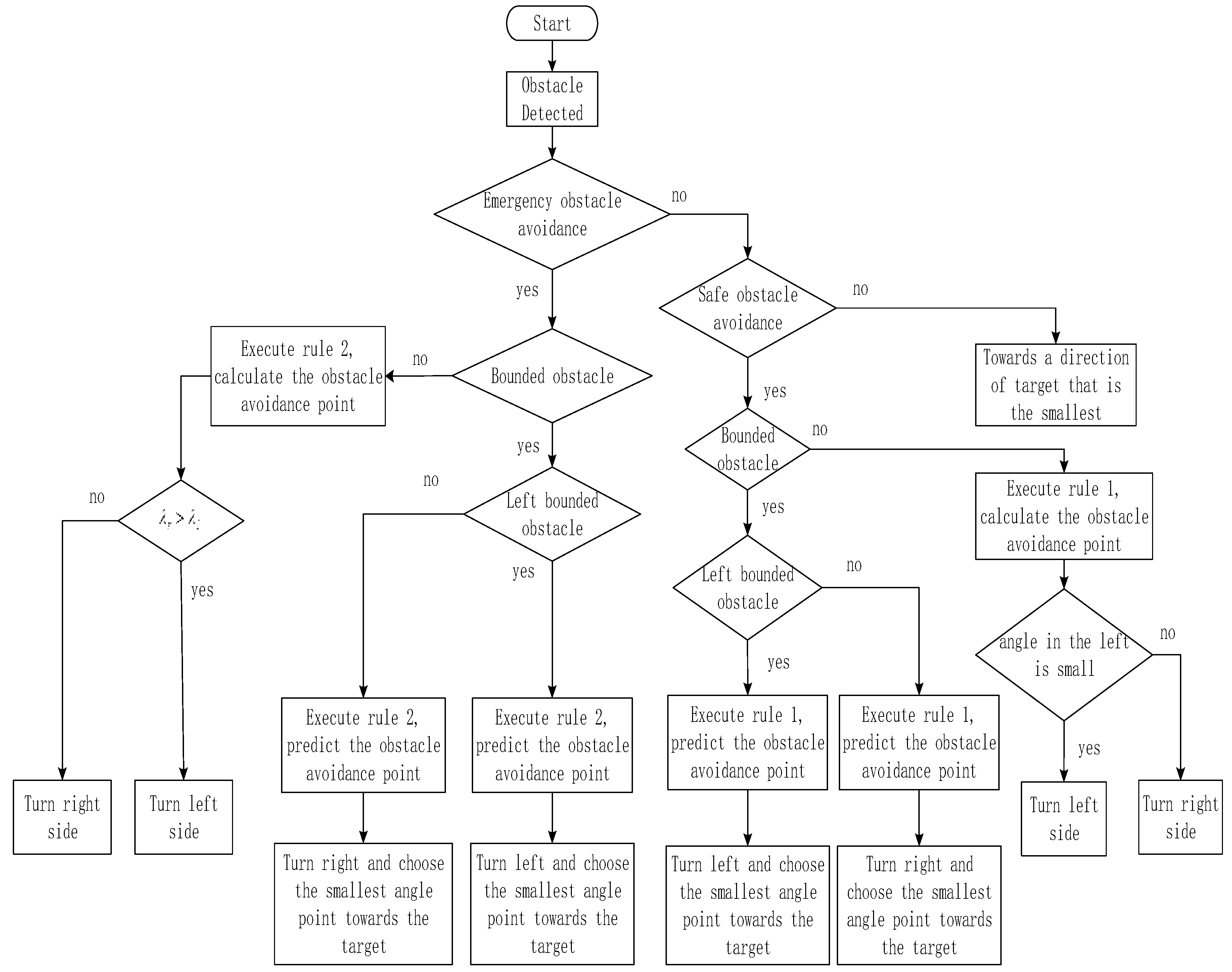
4.2. AUV Obstacle Avoidance Rules
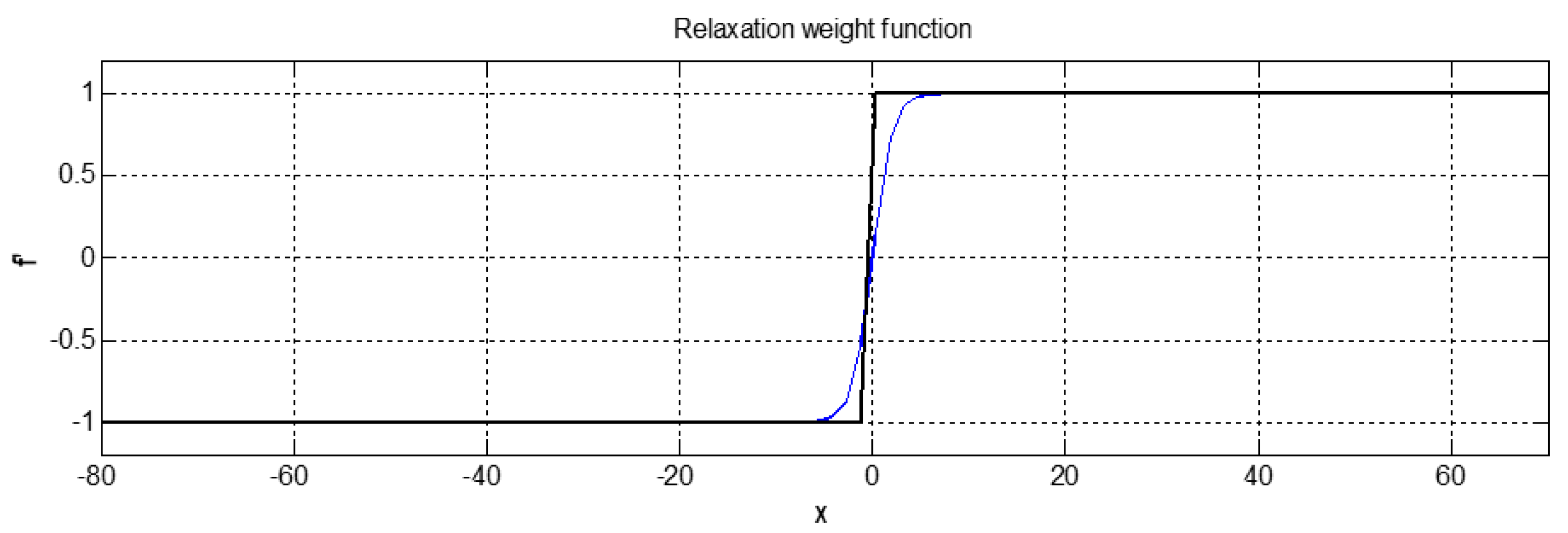
4.3. Constructing the Weighting Function of the Obstacle Avoidance Algorithm
4.3.1. Weight Function for Avoiding Influencing Factors
4.3.2. Conditional Constraints of Weight Function
4.3.3. Conditional Constraints of Weight Function
4.4. Overview of AUV Obstacle Avoidance Algorithms
4.5. Different Obstacle Avoidance Algorithm Designing Various Types of Obstacles
4.5.1. Obstacle Avoidance Algorithm Designing for Simple Convex Obstacles
4.5.2. Obstacle Avoidance Algorithm Design for Vortex Obstacles
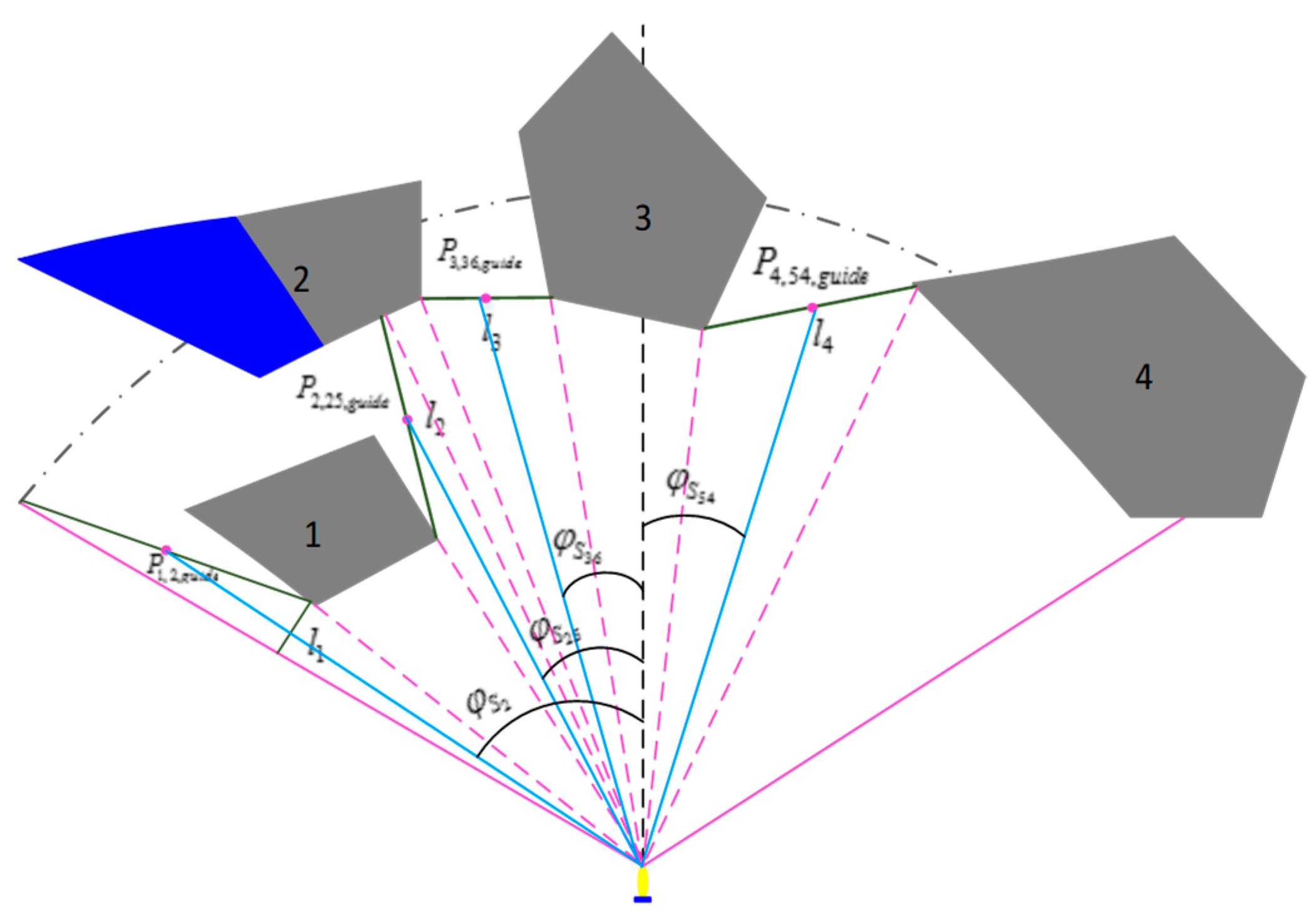
4.5.3. Design of the Obstacle Avoidance Algorithm for Dense Convex Obstacles
5. Simulation Results and Discussions
5.1. Simulation Verification in a Simple Convex Obstacle Environment
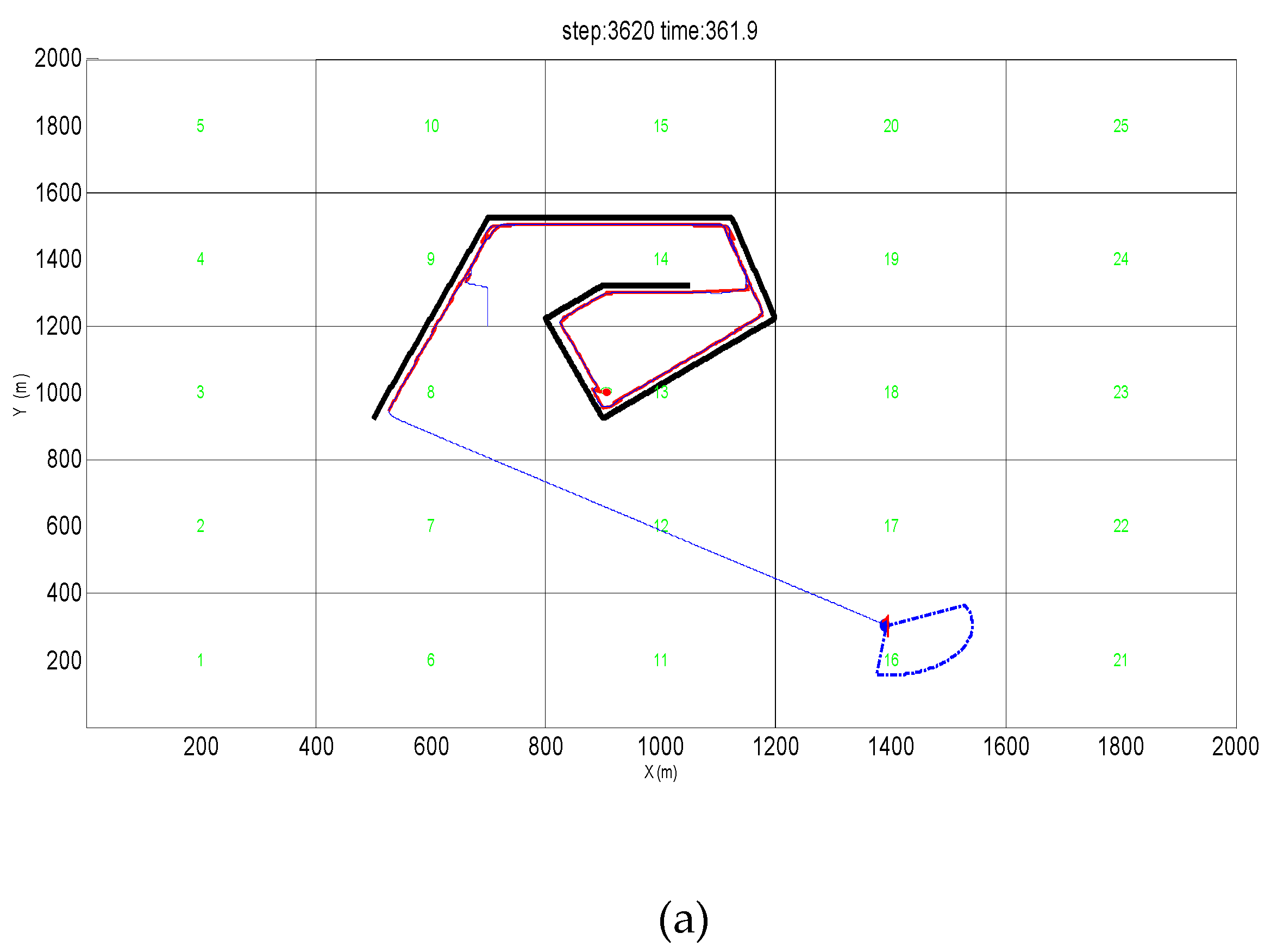
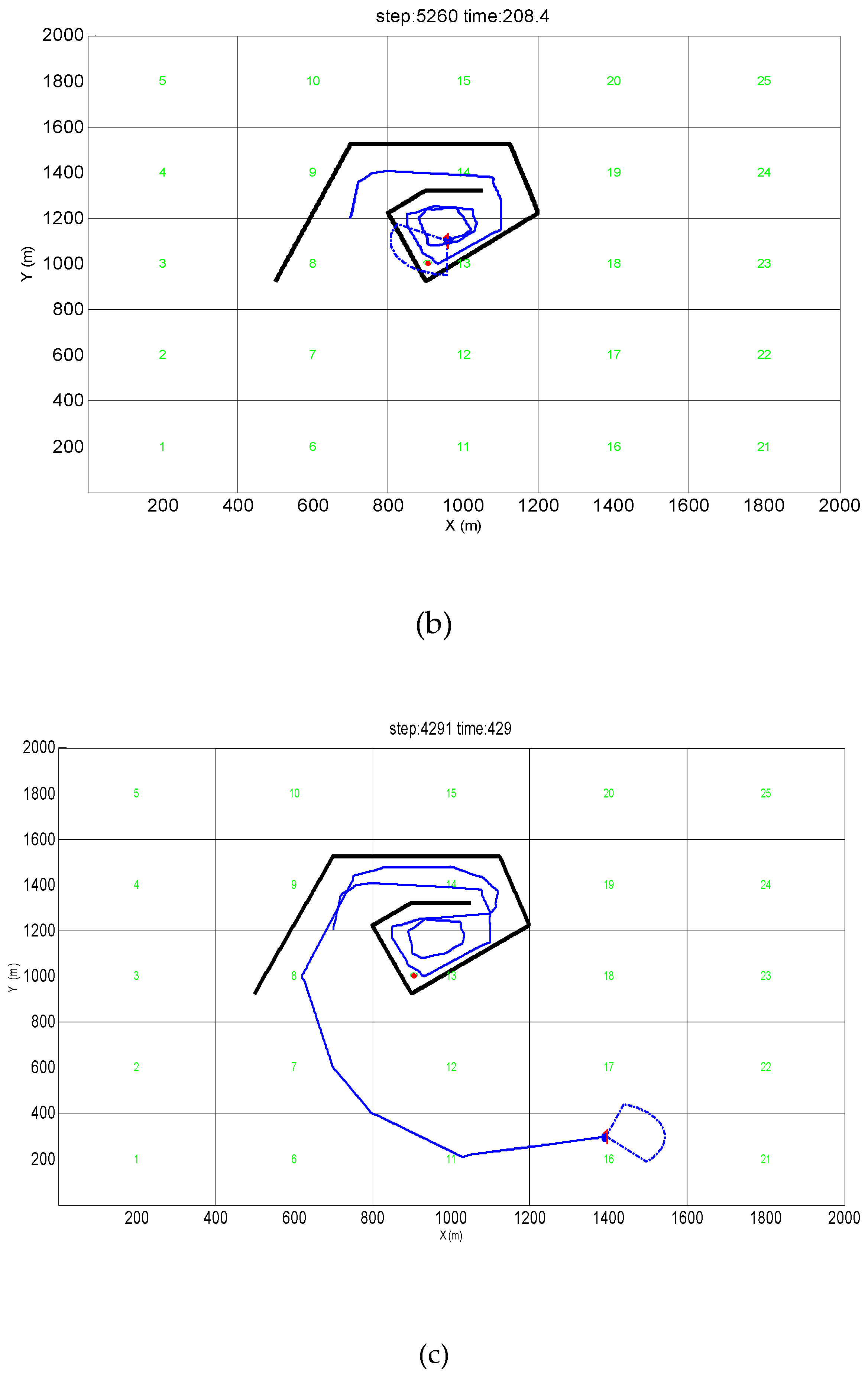
5.2. Simulation Verification in the Vortex Obstacle Environment
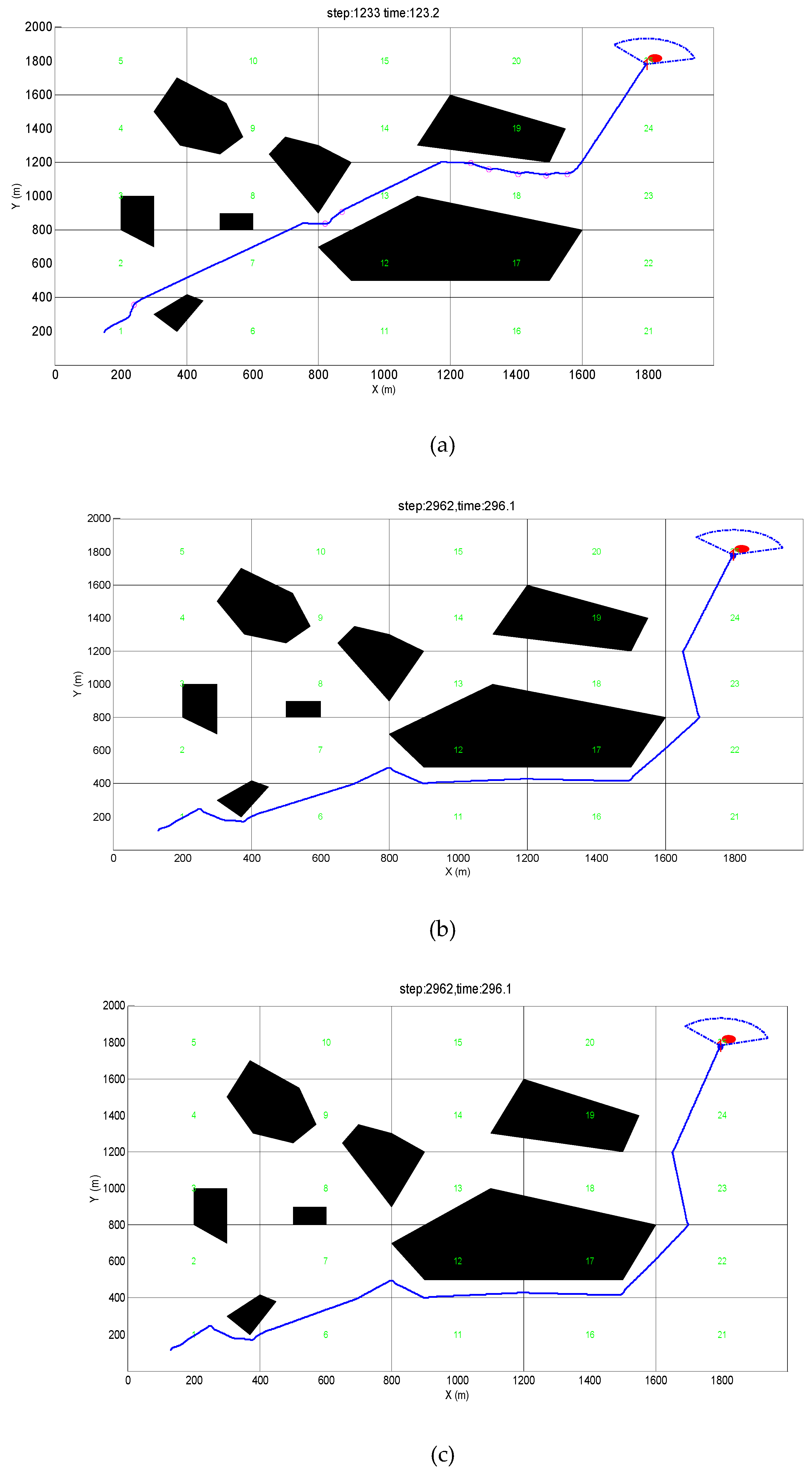
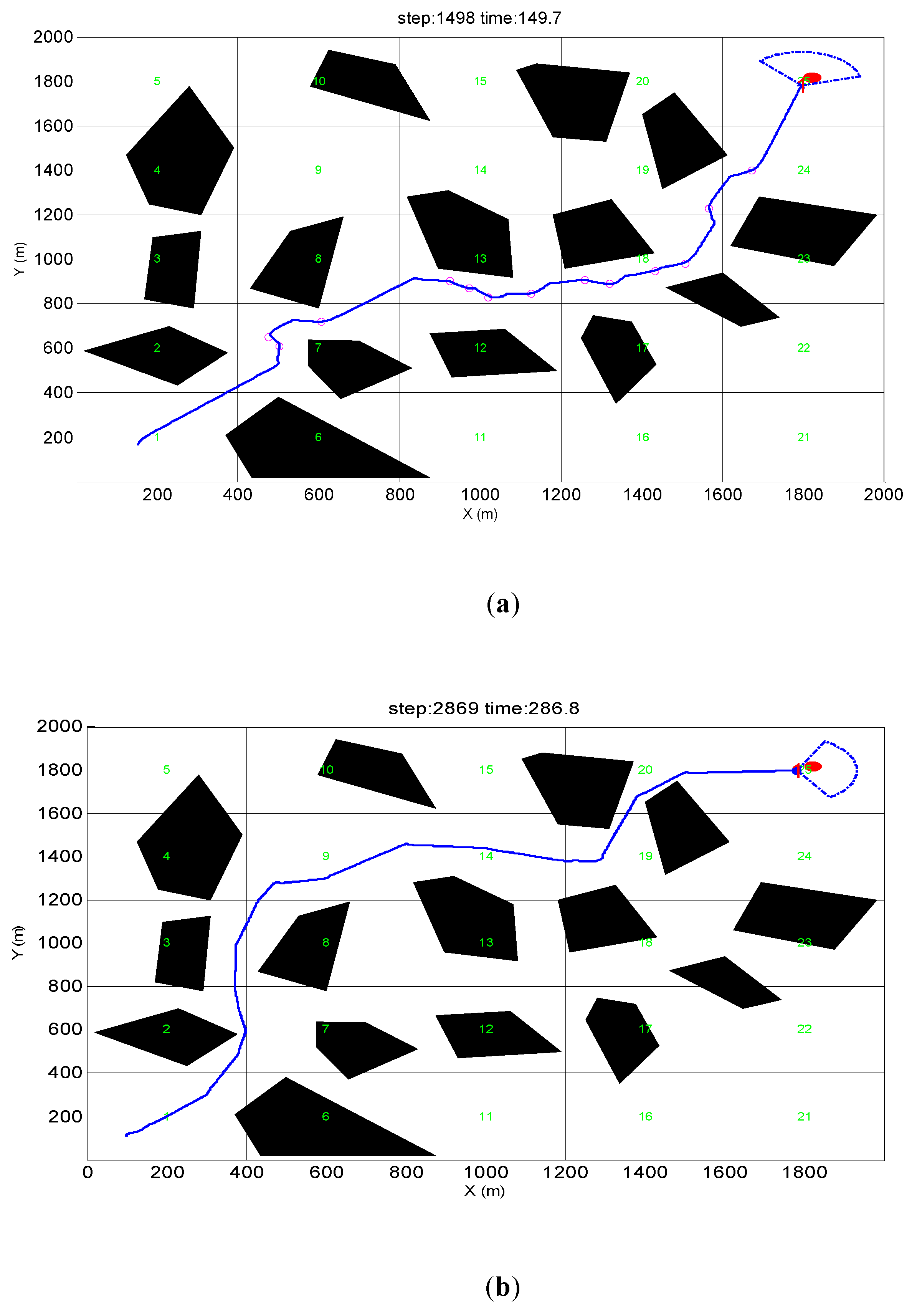
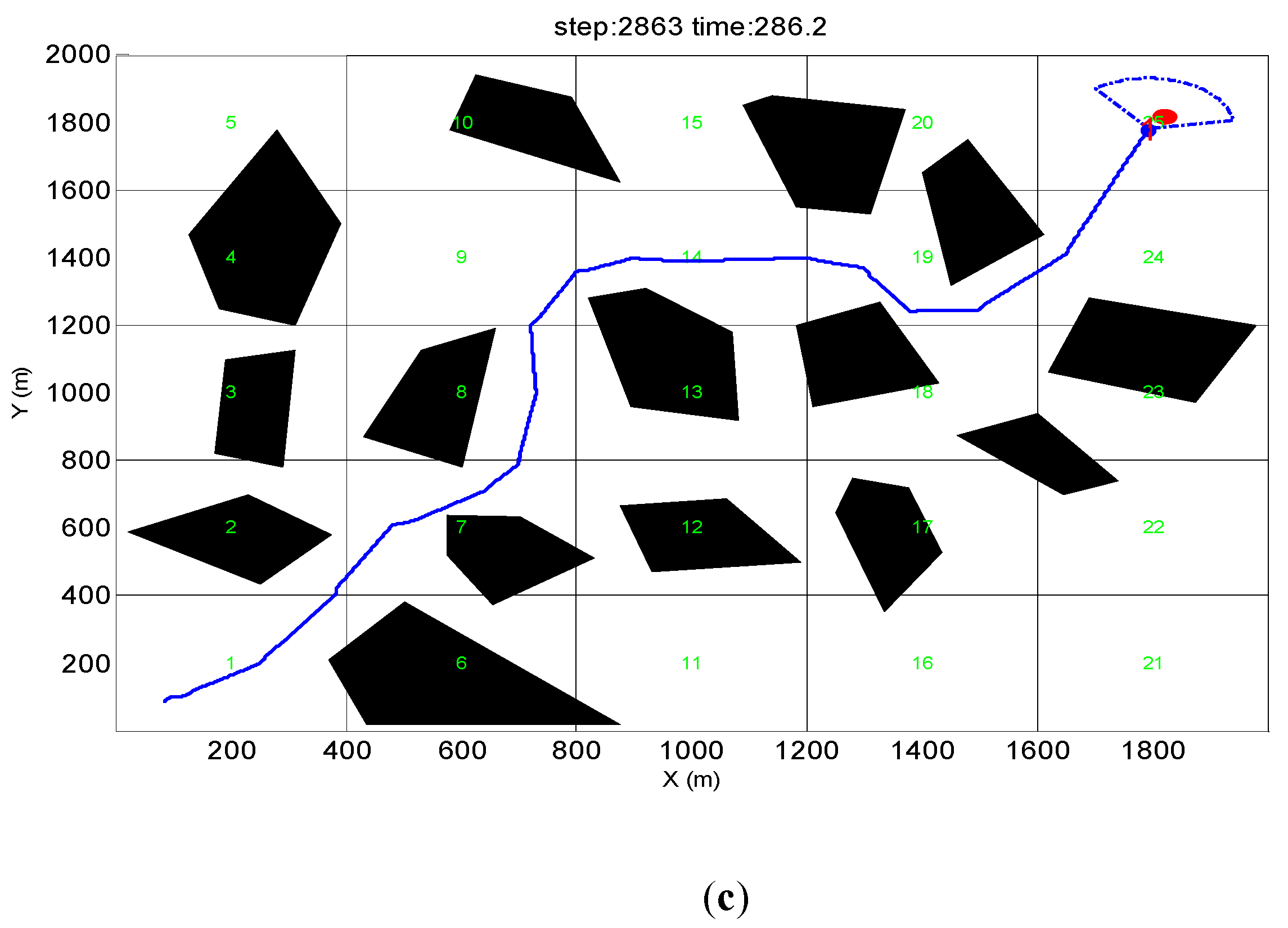
5.3. Simulation Verification in a Dense Obstacle Environment
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yuh, J. Design and Control of Autonomous Underwater Robots: A Survey. Auton. Robot. 2000, 8, 7–24. [Google Scholar] [CrossRef]
- Xin, J. The future underwater robot of the US Navy. Robot. Appl. 2000, 35, 9–11. [Google Scholar]
- Incze, M.L. Light weight autonomous underwater vehicles (AUVs) performing coastal survey operations in REP10A. Ocean Dyn. 2011, 61, 1955–1965. [Google Scholar] [CrossRef]
- Li, Z.; Yang, C.; Ding, N.; Bogdan, S.; Ge, T. Robust adaptive motion control for underwater remotely operated vehicles with velocity constraints. Int. J. Control Autom. Syst. 2012, 10, 421–429. [Google Scholar] [CrossRef]
- Martin, W.; Tal, S. Linear Quadratic Optimal Control based Missile Guidance Law with Obstacle Avoidance. Ieee Trans. Aerosp. Electron. Syst. 2018, 55, 205–214. [Google Scholar]
- Zi, B.; Lin, J.; Qian, S. Localization, obstacle avoidance planning and control of a cooperative cable parallel robot for multiple mobile cranes. Robot. Comput. Integr. Manuf. 2015, 34, 105–123. [Google Scholar] [CrossRef]
- Wu, J.; Yue, X.; Li, W. Integration of Hardware and Software Designs for Object Grasping and Transportation by a Mobile Robot with Navigation Guidance Via a Unique Bearing-Alignment Mechanism. IEEE/ASME Trans. Mechatron. 2016, 21, 576–583. [Google Scholar]
- Kumar, R.P.; Dasgupta, A.; Kumar, C.S. Real-time optimal motion planning for autonomous underwater vehicles. Ocean Eng. 2005, 32, 1431–1447. [Google Scholar] [CrossRef]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons: Hoboken, NJ, USA, 1994. [Google Scholar]
- Likhachev, M.; Ferguson, D.I.; Gordon, G.J.; Stentz, A.; Thrun, S. Anytimedynamic A *: An anytime, replanning algorithm. In Proceedings of the 15th International Conference on Automated Planning and Scheduling, Monterey, CA, USA, 5–10 June 2005; pp. 262–271. [Google Scholar]
- Carsten, J.; Ferguson, D.; Stentz, A. 3D field D *: Improved path planning and replanning in three dimensions. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 3381–3386. [Google Scholar]
- Carroll, K.P.; McClaran, S.R.; Nelson, E.L.; Barnett, D.M.; Friesen, D.K.; William, G. AUV path planning: An A * approach to path planning with consideration of variable vehicle speeds and multiple, overlapping, time-dependent exclusion zones. In Proceedings of the 1992 Symposium on Autonomous Underwater Vehicle Technology, Washington, DC, USA, 2–3 June 1992. [Google Scholar]
- Pereira, A.A.; Binney, J.; Jones, B.H.; Ragan, M.; Sukhatme, G.S. Toward risk aware mission planning for autonomous underwater vehicles. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Pereira, A.A.; Binney, J.; Hollinger, G.A.; Sukhatme, G.S. Risk-aware pathplanning for autonomous underwater vehicles using predictive ocean models. J. Field Robot 2013, 30, 741–762. [Google Scholar] [CrossRef]
- Ferguson, D.; Stentz, A. Using interpolation to improve path planning the field D * algorithm. J. Field Robot 2006, 23, 79–101. [Google Scholar] [CrossRef]
- Daily, R.; Bevly, D.M. Harmonic potential field path planning for high speed vehicles. In Proceedings of the American Control Conference, Washington, DC, USA, 11–13 June 2008; pp. 4609–4614. [Google Scholar]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- Sullivan, J.; Waydo, S.; Campbell, M. Using stream functions for complex behavior and path generation. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Austin, TX, USA, 11–14 August 2003. [Google Scholar]
- Zeng, Z.; Sammut, K.; Lammas, A.; He, F.; Tang, Y. Efficient path re-planning for AUVs operating in spatiotemporal currents. J. Intell. Robot. Syst. 2015, 79, 135–153. [Google Scholar] [CrossRef]
- Cao, J.; Li, Y.; Zhao, S.; Bi, X. Genetic-Algorithm-Based Global Path Planning for AUV. In Proceedings of the 2016 9th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 10–11 December 2016. [Google Scholar]
- Aghababa, M.P. 3D path planning for underwater vehicles using five evolutionary optimization algorithms avoiding static and energetic obstacles. Appl. Ocean Res. 2012, 38, 48–62. [Google Scholar] [CrossRef]
- Harun, N.; Zain, Z.M.; Noh, M.M. PSO approach for a PID back-stepping control method in stabilizing an underactuated X4-AUV[C]// 2017 IEEE 7th International Conference on Underwater System Technology: Theory and Applications (USYS). 2018. [Google Scholar]
- Hu, Q.Y.; Zhou, J.; Zha, Z. Application of PSO-BP Network Algorithm in AUV Depth Control. Appl. Mech. Mater. 2013, 321–324, 2025–2031. [Google Scholar] [CrossRef]
- Dadgar, M.; Jafari, S.; Hamzeh, A. A PSO-based multi-robot cooperation method for target searching in unknown environments. Neurocomputing 2016, 177, 62–74. [Google Scholar] [CrossRef]
- Zhuang, Y.; Sharma, S.; Subudhi, B.; Huang, H.; Wan, J. Efficient collision-free path planning for Autonomous Underwater Vehicles in dynamic environments with a hybrid optimization algorithm. Ocean Eng. 2016, 127, 190–199. [Google Scholar] [CrossRef]
- Horner, D.P.; Healey, A.J.; Kragelund, S. AUV Experiments in Obstacle Avoidance. In Proceedings of the OCEANS 2005 MTS/IEEE, Washington, DC, USA, 17–23 September 2005. [Google Scholar]
- Norgren, P.; Skjetne, R. Line-of-sight iceberg edge-following using an AUV equipped with multibeam sonar. IFAC-Pap. 2015, 48, 81–88. [Google Scholar] [CrossRef]
- Moe, S.; Pettersen, K.Y. Set-based Line-of-Sight (LOS) path following with collision avoidance for underactuated unmanned surface vessel. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016. [Google Scholar]
- Wiig, M.S.; Pettersen, K.Y.; Krogstad, T.R. Collision Avoidance for Underactuated Marine Vehicles Using the Constant Avoidance Angle Algorithm. IEEE Trans. Control Syst. Technol. 2019, 99, 1–16. [Google Scholar] [CrossRef]
- Zhang, G.; Deng, Y.; Zhang, W. Robust neural path-following control for underactuated ships with the DVS obstacles avoidance guidance. Ocean Eng. 2017, 143, 198–208. [Google Scholar] [CrossRef]
- Sur, J.; Lee, Y.; Choi, H.T. Obstacle Avoidance of Autonomous Underwater Vehicle by Using Streamline Function. Ifac Proc. Vol. 2012, 45, 236–241. [Google Scholar] [CrossRef]
- Manup, B.; Raja, P. Collision-avoidance for mobile robots using region of certainty: A predictive approach. J. Eng. Sci. Technol. 2016, 11, 18–28. [Google Scholar]
- Ataei, M.; Yousefi-Koma, A. Three-dimensional optimal path planning for waypoint guidance of an autonomous underwater vehicle. Robot. Auton. Syst. 2015, 67, 23–32. [Google Scholar] [CrossRef]
- Wu, X.; Feng, Z.; Zhu, J.; Allen, R. Line of Sight Guidance with Intelligent Obstacle Avoidance for Autonomous Underwater Vehicles. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006. [Google Scholar]
- Shojaei, K.; Arefi, M.M. On the neuro-adaptive feedback linearising control of underactuated autonomous underwater vehicles in three-dimensional space. IET Control Theory Appl. 2015, 9, 1264–1273. [Google Scholar] [CrossRef]
- Fossen, T.I.; Sagatun, S.I. Adaptive Control of Nonlinear Systems: A Case Study of Underwater Robotic Systems. J. Robot. Syst. 1991, 8, 393–412. [Google Scholar] [CrossRef]
- Zhao, S.; Lu, T.F.; Anvar, A. Automatic object detection for AUV navigation using imaging sonar within confined environments. In Proceedings of the 2009 4th IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 25–27 May 2009; pp. 3648–3653. [Google Scholar]
- Chatzichristofis, S.; Kapoutsis, A.; Kosmatopoulos, E.B.; Doitsidis, L.; Rovas, D.; de Sousa, J.B. The NOPTILUS project: Autonomous Multi-AUV Navigation for Exploration of Unknown Environments. IFAC Proceedings Volumes 2012, 45, 373–380. [Google Scholar] [CrossRef] [Green Version]
- Yan, Z.; Li, J.; Zhang, G.; Wu, Y. A Real-Time Reaction Obstacle Avoidance Algorithm for Autonomous Underwater Vehicles in Unknown Environments. Sensors 2018, 18, 438. [Google Scholar] [CrossRef]
- Xi, Y.-G. Predictive Control, 2nd ed.; National Defense Industry Press: Beijing, China, 2013. [Google Scholar]
- Liu, M.-M.; Cui, C.-F.; Tong, X.-J.; Dai, Y.-H. Algorithm Software for Mixed Integer Nonlinear Programming and Recent Progress. Sci. Sin. 2016, 46, 1–20. [Google Scholar] [CrossRef]
- Chen, B.-L. Optimization Theory and Algorithm; Tsinghua University Press: Beijing, China, 2005. [Google Scholar]
- Powell, M.J.D. The convergence of variable metric methodsfor nonlinearly constrained optimization calculations. In Nonlinear Programming 3; Mangasarian, O.L., Meyer, R.R., Robinson, M., Eds.; Academic Press: Cambridge, MA, USA, 1978. [Google Scholar]
- Constrained Optimization, Sequential Quadratic Programming (SQP). Optimization Toolbox User’s Guide; Math-Works Inc.: Natick, MA, USA, 2016. [Google Scholar]


















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Zhang, J.; Zhang, H.; Yan, Z. A Predictive Guidance Obstacle Avoidance Algorithm for AUV in Unknown Environments. Sensors 2019, 19, 2862. https://doi.org/10.3390/s19132862
Li J, Zhang J, Zhang H, Yan Z. A Predictive Guidance Obstacle Avoidance Algorithm for AUV in Unknown Environments. Sensors. 2019; 19(13):2862. https://doi.org/10.3390/s19132862
Chicago/Turabian StyleLi, Juan, Jianxin Zhang, Honghan Zhang, and Zheping Yan. 2019. "A Predictive Guidance Obstacle Avoidance Algorithm for AUV in Unknown Environments" Sensors 19, no. 13: 2862. https://doi.org/10.3390/s19132862
APA StyleLi, J., Zhang, J., Zhang, H., & Yan, Z. (2019). A Predictive Guidance Obstacle Avoidance Algorithm for AUV in Unknown Environments. Sensors, 19(13), 2862. https://doi.org/10.3390/s19132862