1. Introduction
Aeromagnetic surveys originated in the 1930s for military applications [
1] and now play a very important role in many other fields, such as geophysical exploration. With the magnetometers installed aboard aircrafts, people can measure the magnetic field at a very flexible scale [
2]. However, since the aircraft has its own magnetic field, which degrades the reliability of the measurements, a technique to reduce the magnetic interference field is required, that is, aeromagnetic compensation [
3,
4].
Aeromagnetic compensation is mainly based on the Tolles–Lawson (T–L) model [
5,
6], which decomposes the magnetic interference field into three sources: the permanent field, induced field, and eddy-current field. Combining all of these fields, the magnetic interference field can be described as a linear equation with 18 or 16 terms (the latter being simplified from an 18-term equation) [
7]. Solving this equation is called a calibration, which is a key issue in aeromagnetic compensation, and the elements of the solution are called coefficients. Commonly, a figure-of-merit (FOM) flight [
8] is implemented for calibration, which includes four orthogonal headings and three sets of maneuvers (pitches, rolls, and yaws) in each heading. After removing the ambient magnetic field from the measured total field, the remaining field is considered to be the magnetic interference field, which can be the dependent variable of the 16-term (or 18-term) linear equation. Then the coefficients can be estimated through regression.
To yield a more accurate set of coefficients, researchers have made many efforts toward improving the model [
9,
10], optimizing the solving method [
11,
12,
13,
14,
15,
16], and correcting the sensor errors [
17]. Theoretically, with the assumption that the ambient magnetic field is uniform [
7], the coefficients of the T–L model are directly linked to the aircraft itself because they are due to its properties, such as the materials and the electrical systems. However, in practice, the coefficients are hard to obtain accurately. One reason for this is that the uniformity assumption of the ambient magnetic field is unrealistic. Another significant factor is multicollinearity among the 16 or 18 variables of the linear equation, which causes noise sensitivity in the estimation. To mitigate the multicollinearity, some statistical methods are utilized, such as ridge regression (RR) [
7], truncated singular value decomposition (TSVD) [
14], and partial least-squares regression (PLSR) [
15]. These methods render the estimated coefficients more accurate for the 18-term model but are not always effective for the 16-term model [
7]. Two variables are excluded in the 16-term model because they can be linearly represented by other variables and contribute significantly to the multicollinearity. Nevertheless, the multicollinearity is typically still strong.
In this paper addressing aeromagnetic compensation based on scalar magnetometers, we analyze the sources of multicollinearity and find those that depend on the flight heading. Differing from the present methods that regard the FOM flight as a whole, here we propose a multimodel method to compensate for the magnetic interference field of the aircraft, according to the flight heading. By selecting different variable sets for different headings, multicollinearity can be inhibited.
This paper is structured as follows. In
Section 2, we describe the T–L model, analyze why multicollinearity occurs, and present our method. In
Section 3, the method’s performance is verified by a set of airborne tests.
Section 4 is the conclusion.
4. Conclusions
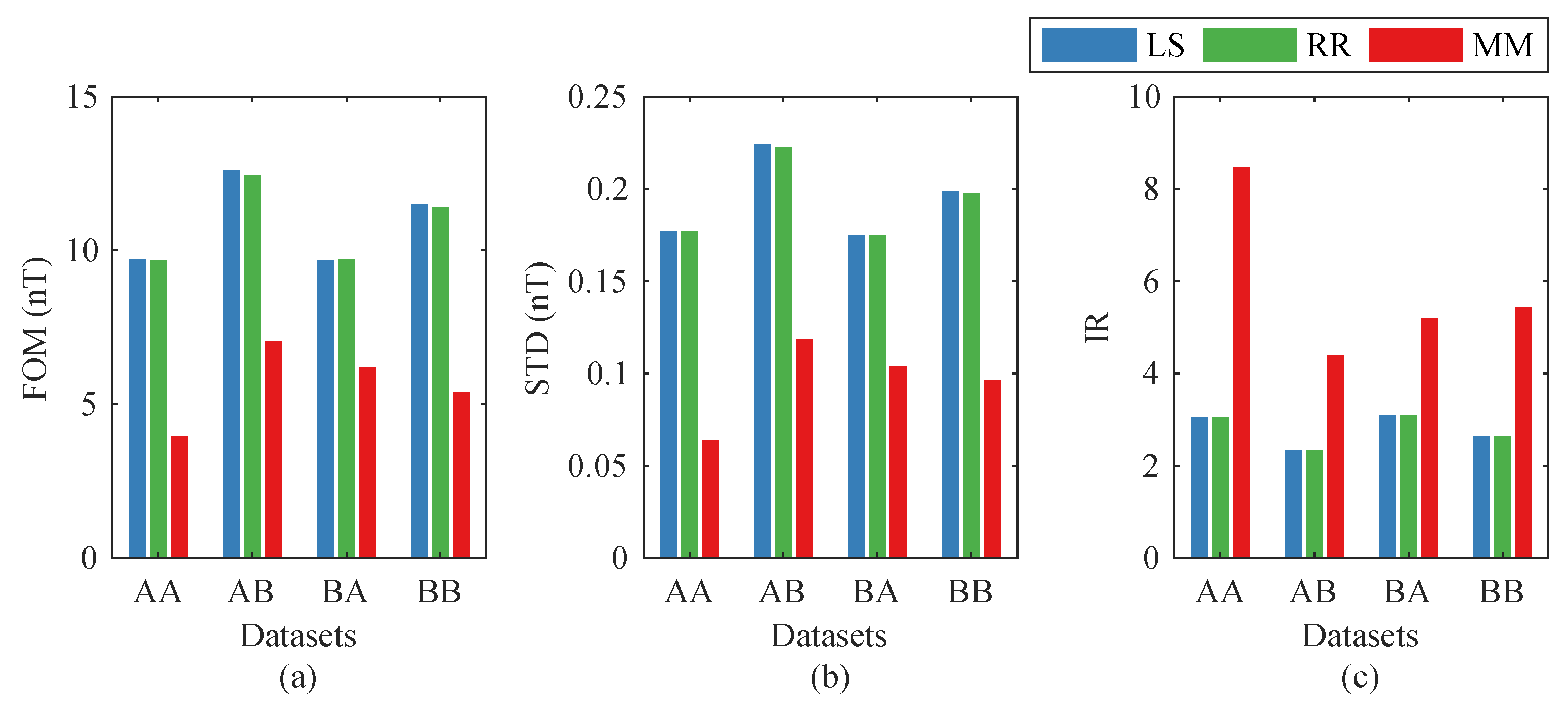
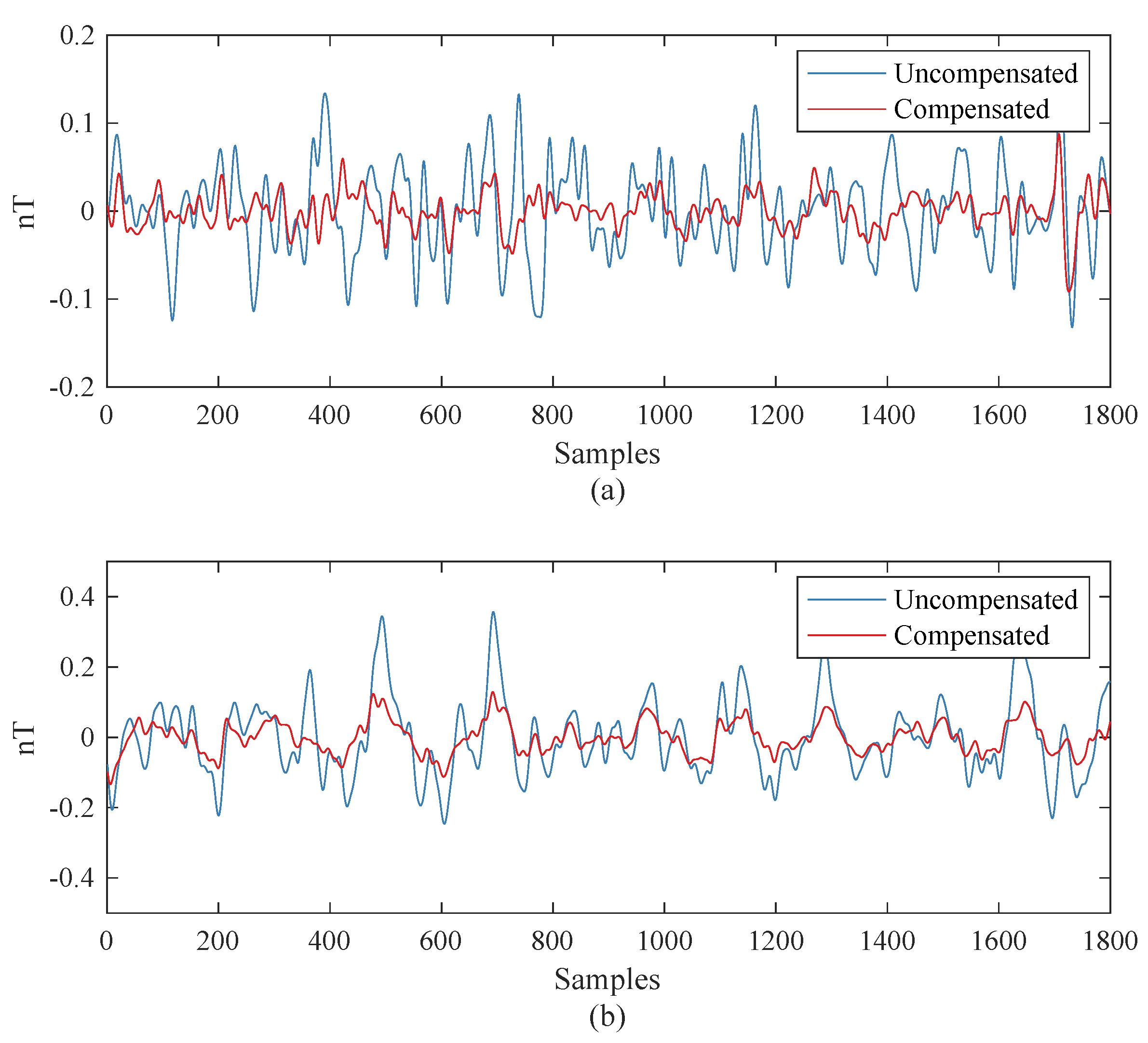
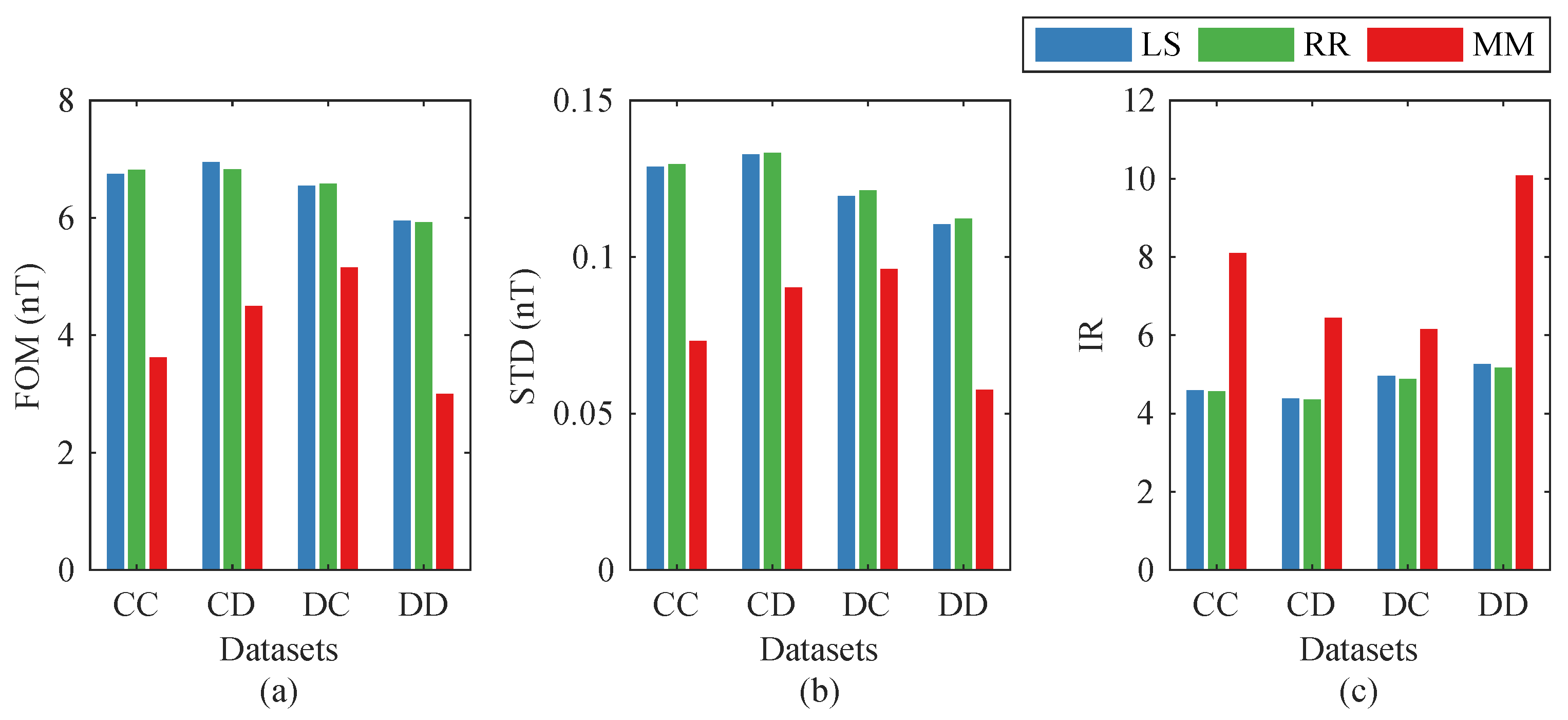
Magnetometers are usually equipped aboard an aircraft in many applications, such as geophysical exploration. As the magnetic field caused by the aircraft interferes with the measurements, an aeromagnetic compensation method should be applied. Most aeromagnetic compensation methods are based on the T–L model and are restricted by its multicollinearity. Herein, we have found that the model variables causing the multicollinearity differ according to the flight heading, based on which we proposed a multimodel method to mitigate the multicollinearity. This method built different sub-models for different headings by selecting the variables with smaller VIFs. In the real flight experiments, the MM method reduced the FOM from 26.6769 to 7.0414. The improvement factor is 3.7886, higher than the factors yielded by two conventional methods (the LS and RR methods), which were 2.1192 and 2.1448, respectively. In the level flight tests, the MM method reduced the STDs by about 2.4 times.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}