Real-Time Correction and Stabilization of Laser Diode Wavelength in Miniature Homodyne Interferometer for Long-Stroke Micro/Nano Positioning Stage Metrology


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
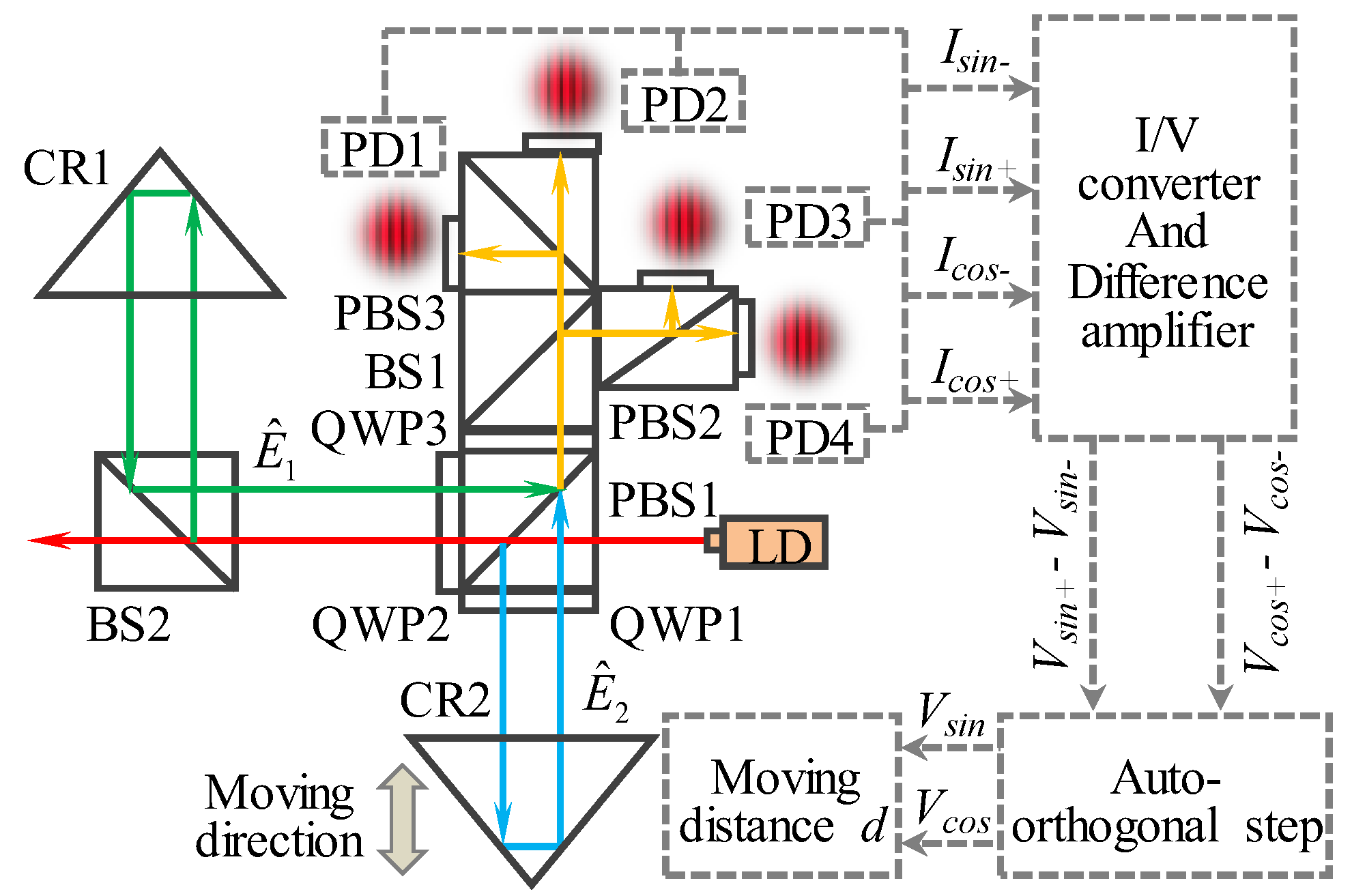
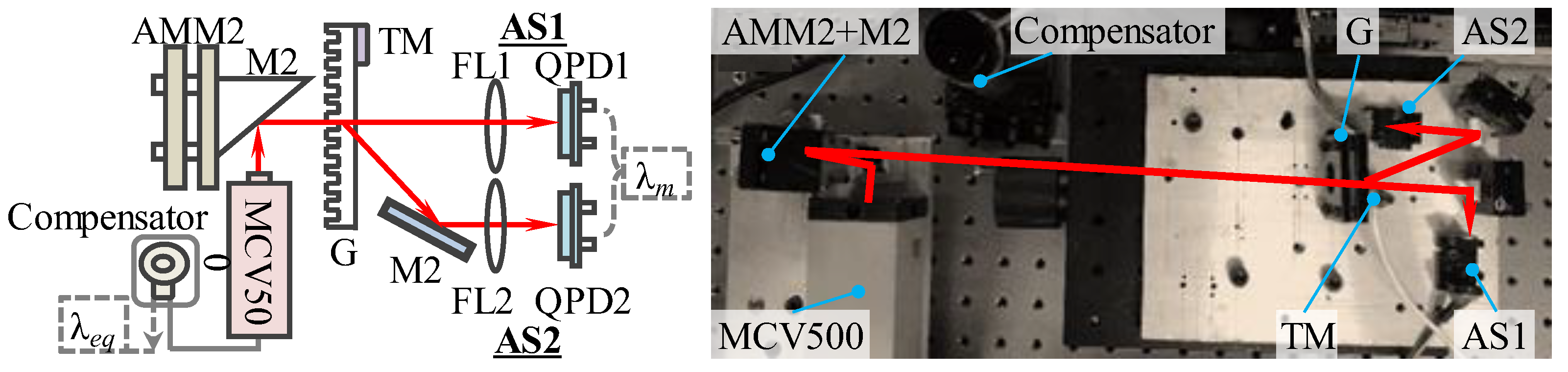
2. Optical Configuration
3. Measurement Principle
4. Experiments and Results
4.1. Performance of the Real-Time Wavelength Corrector (RWC)
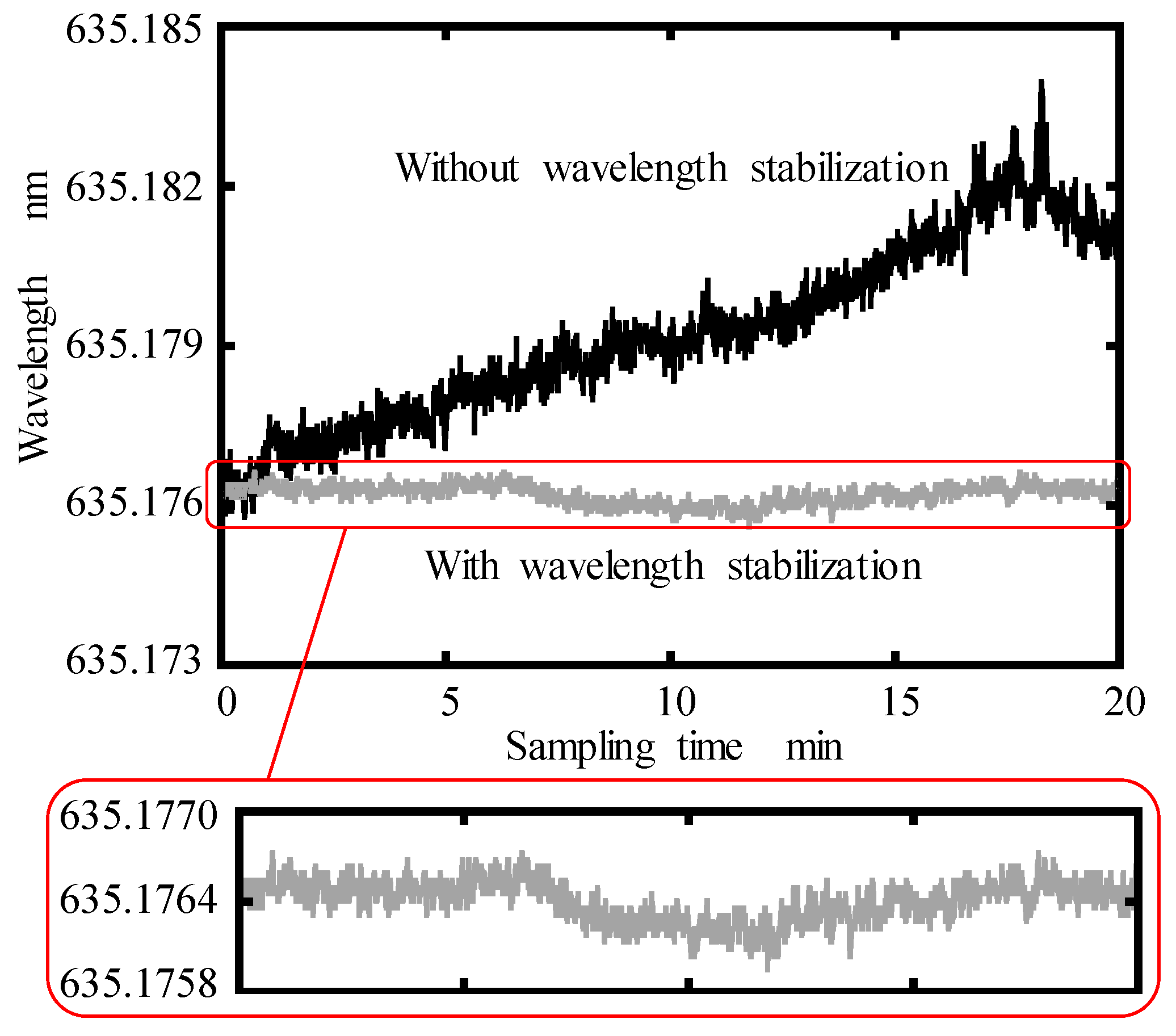
4.2. Performance of the Real-Time Wavelength Stabilizer (RWS)
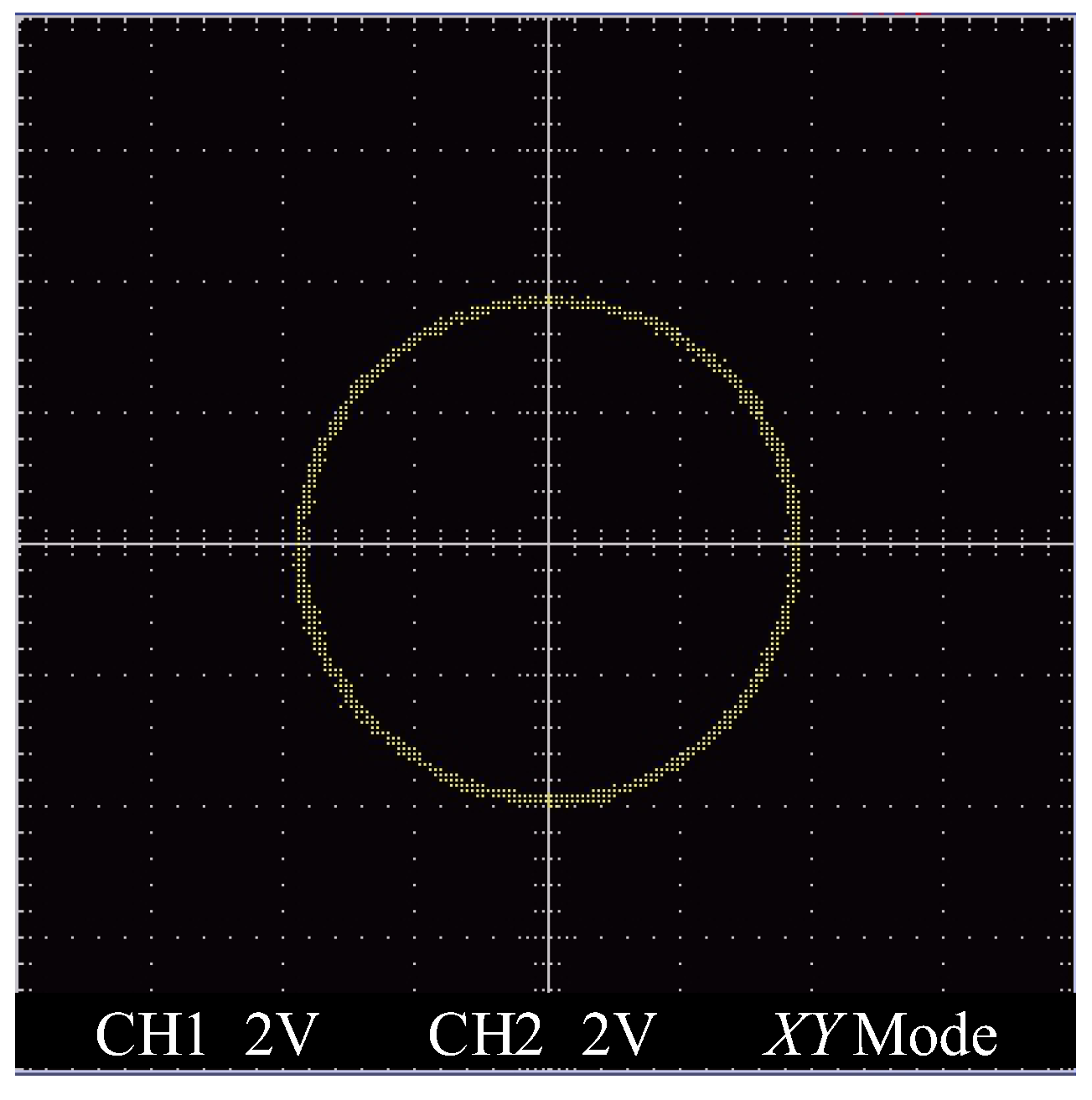
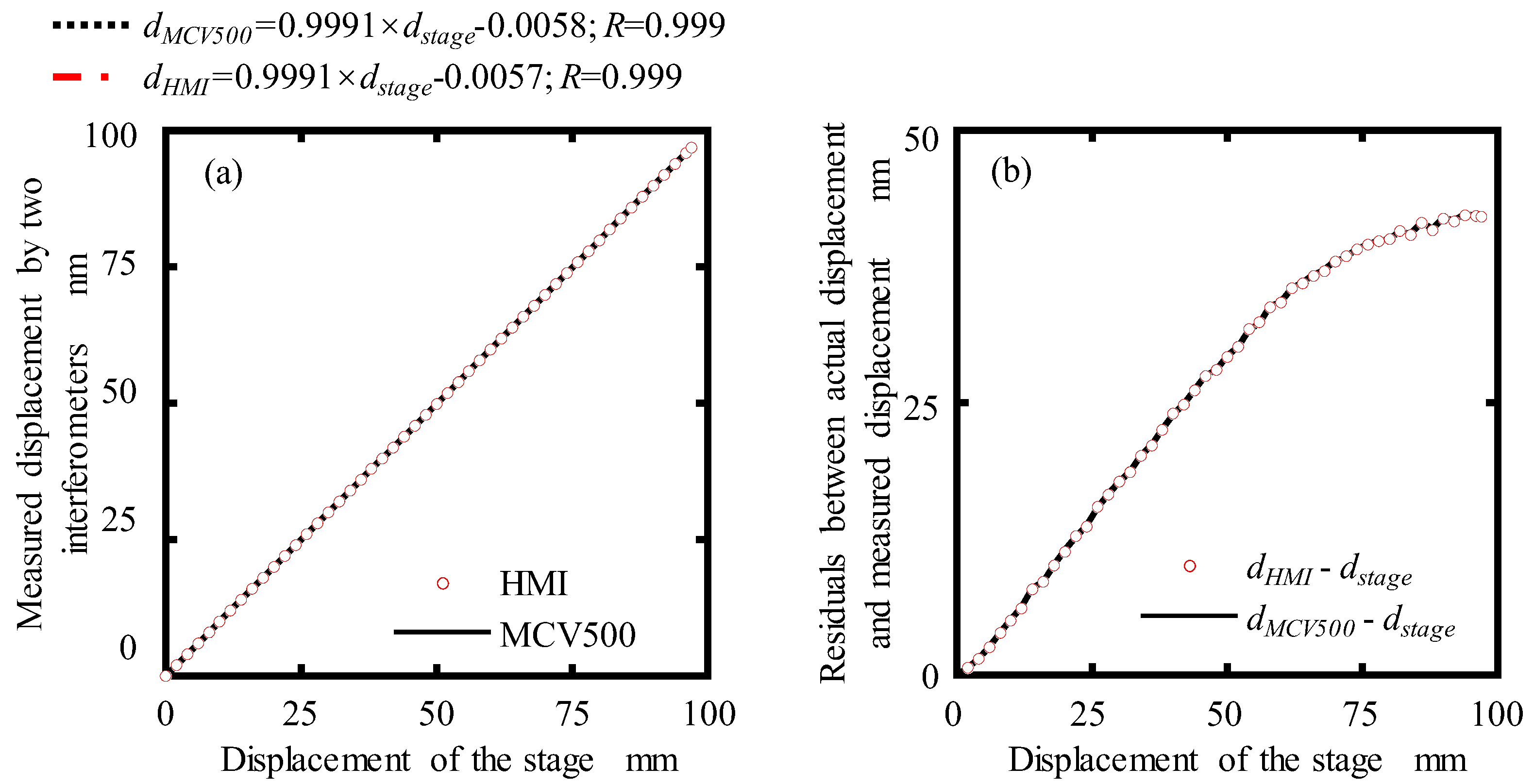
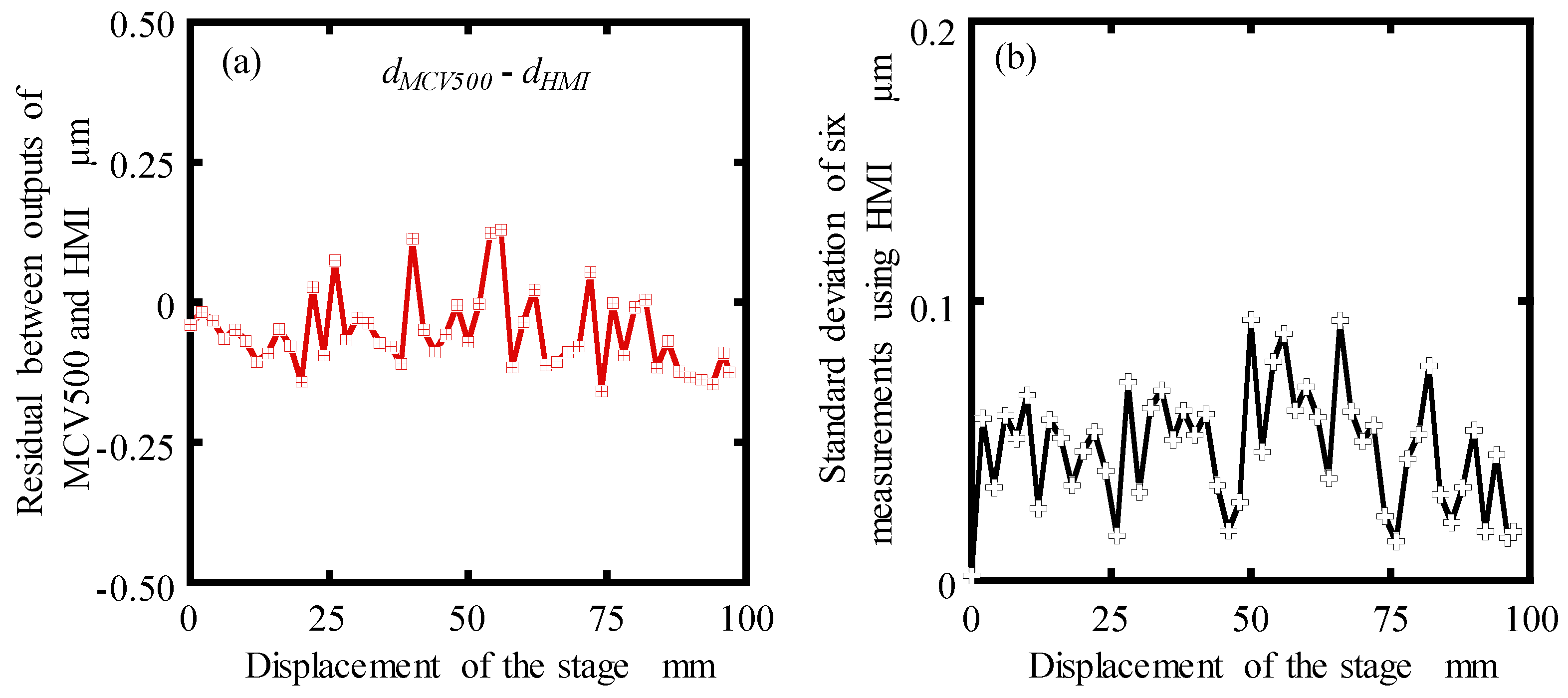
4.3. Performance of the Miniature Homodyne Interferometer (MHI)
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Torralba, M.; Valenzuela, M.; Yagüe-Fabra, J.A.; Albajez, J.A.; Aguilar, J.J. Large range nanopositioning stage design: A three-layer and two-stage platform. Measurement 2016, 89, 55–71. [Google Scholar] [CrossRef]
- Gao, W.; Haitjema, H.; Fang, F.Z.; Leach, R.K.; Cheung, C.F.; Savio, E.; Linares, J.M. On-machine and in-process surface metrology for precision manufacturing. CIRP Ann. 2019, 68, 843–866. [Google Scholar] [CrossRef] [Green Version]
- Ibaraki, S.; Kudo, T.; Yano, T.; Takatsuji, T.; Osawa, S.; Sato, O. Estimation of three-dimensional volumetric errors of machining centers by a tracking interferometer. Precis. Eng. 2015, 39, 179–186. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Gao, W.; Muto, H.; Shimizu, Y.; Ito, S.; Dian, S. A six-degree-of-freedom surface encoder precision positioning of a planar motion stage. Precis. Eng. 2013, 37, 771–781. [Google Scholar] [CrossRef]
- Cheng, F.; Fan, K.C. Linear diffraction grating interferometer with high alignment tolerance and high accuracy. Appl. Opt. 2011, 50, 4550–4556. [Google Scholar] [CrossRef]
- Wang, H.Y.; Fan, K.C.; Ye, J.K.; Lin, C.H. A Long-Stroke Nanopositioning Control System of the Coplanar Stage. IEEE/ASME Trans. Mechatron. 2014, 19, 348–356. [Google Scholar] [CrossRef]
- Cai, Y.; Lou, Z.; Ling, S.; Liao, B.S.; Fan, K.C. Development of a compact three-degree-of-freedom laser measurement system with self-wavelength correction for displacement feedback of a nanopositioning stage. Appl. Sci. 2018, 8, 2209. [Google Scholar] [CrossRef]
- Donati, S.; Falzoni, L.; Merlo, S. A PC-Interfaced, compact laser diode feedback interferometer for displacement measurements. IEEE Trans. Instrum. Meas. 1996, 45, 942–947. [Google Scholar] [CrossRef]
- Dobosz, M. Laser diode distance measuring interferometer – metrological properties. Metrol. Meas. Syst. 2012, 19, 553–564. [Google Scholar] [CrossRef]
- Atkinson, L.G.; Vent, K.J.; Wong, J.P. Compact distance measuring interferometer. United States Patent US5374991, 1994. [Google Scholar]
- Gawlik, W.; Zachorowaki, J. Stabilization of diode-laser frequency to atomic transitions. Opt. Appl. 2004, 34, 607–618. [Google Scholar]
- Dobosz, M.; Kożuchowski, M. Frequency stabilization of a laser diode by means of an optical wedge etalon. Meas. Sci. Technol. 2012, 23, 1–9. [Google Scholar] [CrossRef]
- Zhmud, A.A. Differential Method of Diode Laser Wavelength Stabilization. Jpn. J. Appl. Phys. 2001, 40, 5947–5948. [Google Scholar] [CrossRef]
- Corwin, K.L.; Lu, Z.T.; Hand, C.F.; Epstein, R.J.; Wieman, C.E. Frequency-stabilized diode laser with the Zeeman shift in an atomic vapor. Appl. Opt. 1998, 37, 3295–3298. [Google Scholar] [CrossRef] [PubMed]
- Arie, A.; Schiller, S.; Gustafson, E.K.; Byer, R.L. Absolute frequency stabilization of diode-laser-pumped Nd:YAG lasers to hyperfine transitions in molecular iodine. Opt. Lett. 1992, 17, 1204–1206. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Ye, Z.; Wu, X.; Li, F. Design of Automatic Temperature Control System on Laser Diode of Erbium Doped Fiber Source. In Proceedings of the 2010 Fourth International Conference on Intelligent Computation Technology and Automation, Shenzhen, Guangdong, China, 28–29 March 2011; pp. 404–407. [Google Scholar]
- High performance temperature control in laser diode test application. Available online: https://www.laserdiodesource.com/com.laserdiodesource/technotes/ILX-LIGHTWAVE-High-Performance-Temperature-Control-in-Laser-Diode-Test-Applications.pdf (accessed on 3 September 2019).
- Edlen, B. The Refractive Index of Air. Metrologia 1996, 2, 71–80. [Google Scholar] [CrossRef]
- Bönsch, G.; Potulski, E. Measurement of the refractive index of air and comparison with modified Edlen’s formulae. Metrologia 1998, 35, 133–139. [Google Scholar] [CrossRef]
- Ciddor, P.E. Refractive index of air: New equations for the visible and near infrared. Appl. Opt. 1996, 35, 1566–1573. [Google Scholar] [CrossRef]
- Zang, Z.G.; Yang, W.X. Theoretical and experimental investigation of all-optical switching based on cascaded LPFGs separated by an erbium-doped fiber. J. Appl. Phys. 2011, 109, 103106. [Google Scholar] [CrossRef]
- Monchalin, J.P.; Kelly, M.J.; Thomas, J.E.; Kurnit, N.A.; Szöke, A.; Zernike, F.; Lee, P.H.; Javan, A. Accurate laser wavelength measurement with a precision two-beam scanning Michelson interferometer. Appl. Opt. 1981, 20, 736–757. [Google Scholar] [CrossRef]
- Zhang, J.; Lu, Z.H.; Wang, Y.H.; Liu, T.; Stejskal, A.; Zhao, Y.N. Exact frequency comb mode number determination in precision optical frequency measurements. Laser Phys. 2007, 17, 1025–1028. [Google Scholar] [CrossRef]
- Ye, J.; Schnatz, H.; Hollberg, L. Optical frequency combs: From frequency metrology to optical phase control. IEEE J. Sel. Top. Quantum Electron. 2003, 9, 1041–1058. [Google Scholar]
- Jang, Y.; Kim, S.W. Distance Measurements Using Mode-Locked Lasers: A Review. Nanomanuf. Metrol. 2018, 1, 131–147. [Google Scholar] [CrossRef]
- Kim, J.; Song, Y. Ultralow-noise mode-locked fiber lasers and frequency combs: Principles, status, and applications. Adv. Opt. Photonics 2016, 8, 465–540. [Google Scholar] [CrossRef]
- Diddams, S.A. The evolving optical frequency comb. J. Opt. Soc. Am. B 2010, 27, B51–B62. [Google Scholar] [CrossRef]
- Dobosz, M.; Kożuchowski, M. Overview of the laser-wavelength measurement methods. Opt. Lasers Eng. 2017, 98, 107–117. [Google Scholar] [CrossRef]
- Cooper, D.; Smith, P. Simple and highly sensitive method for wavelength measurement of low-power time-multiplexed signals using optical amplifiers. J. Ligthwave Technol. 2003, 21, 1612–1620. [Google Scholar] [CrossRef]
- Brochure: XL-80 laser measurement system. Available online: https://www.renishaw.com/en/xl-80-laser-system--8268 (accessed on 28 August 2019).
- Optics and laser heads for laser-interferometer positioning systems. Available online: https://literature.cdn.keysight.com/litweb/pdf/5964-6190E.pdf?id=1000082017:epsg:dow (accessed on 25 August 2019).
- Cai, Y.; Sang, Q.; Lou, Z.F.; Fan, K.C. Error analysis and compensation of a laser measurement system for simultaneously measuring five-degree-of-freedom error motions of linear stages. Sensors 2019, 19, 3833. [Google Scholar] [CrossRef]






© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, Y.; Feng, B.; Sang, Q.; Fan, K.-C. Real-Time Correction and Stabilization of Laser Diode Wavelength in Miniature Homodyne Interferometer for Long-Stroke Micro/Nano Positioning Stage Metrology. Sensors 2019, 19, 4587. https://doi.org/10.3390/s19204587
Cai Y, Feng B, Sang Q, Fan K-C. Real-Time Correction and Stabilization of Laser Diode Wavelength in Miniature Homodyne Interferometer for Long-Stroke Micro/Nano Positioning Stage Metrology. Sensors. 2019; 19(20):4587. https://doi.org/10.3390/s19204587
Chicago/Turabian StyleCai, Yindi, Baokai Feng, Qi Sang, and Kuang-Chao Fan. 2019. "Real-Time Correction and Stabilization of Laser Diode Wavelength in Miniature Homodyne Interferometer for Long-Stroke Micro/Nano Positioning Stage Metrology" Sensors 19, no. 20: 4587. https://doi.org/10.3390/s19204587