Deployment of Lidar from a Ground Platform: Customizing a Low-Cost, Information-Rich and User-Friendly Application for Field Phenomics Research

Abstract
:1. Introduction
2. Materials and Methods
2.1. Field Platform and Experimental Setup
2.2. Light Detection and Ranging (Lidar) Scanning System Development
2.2.1. Sensor Specifications
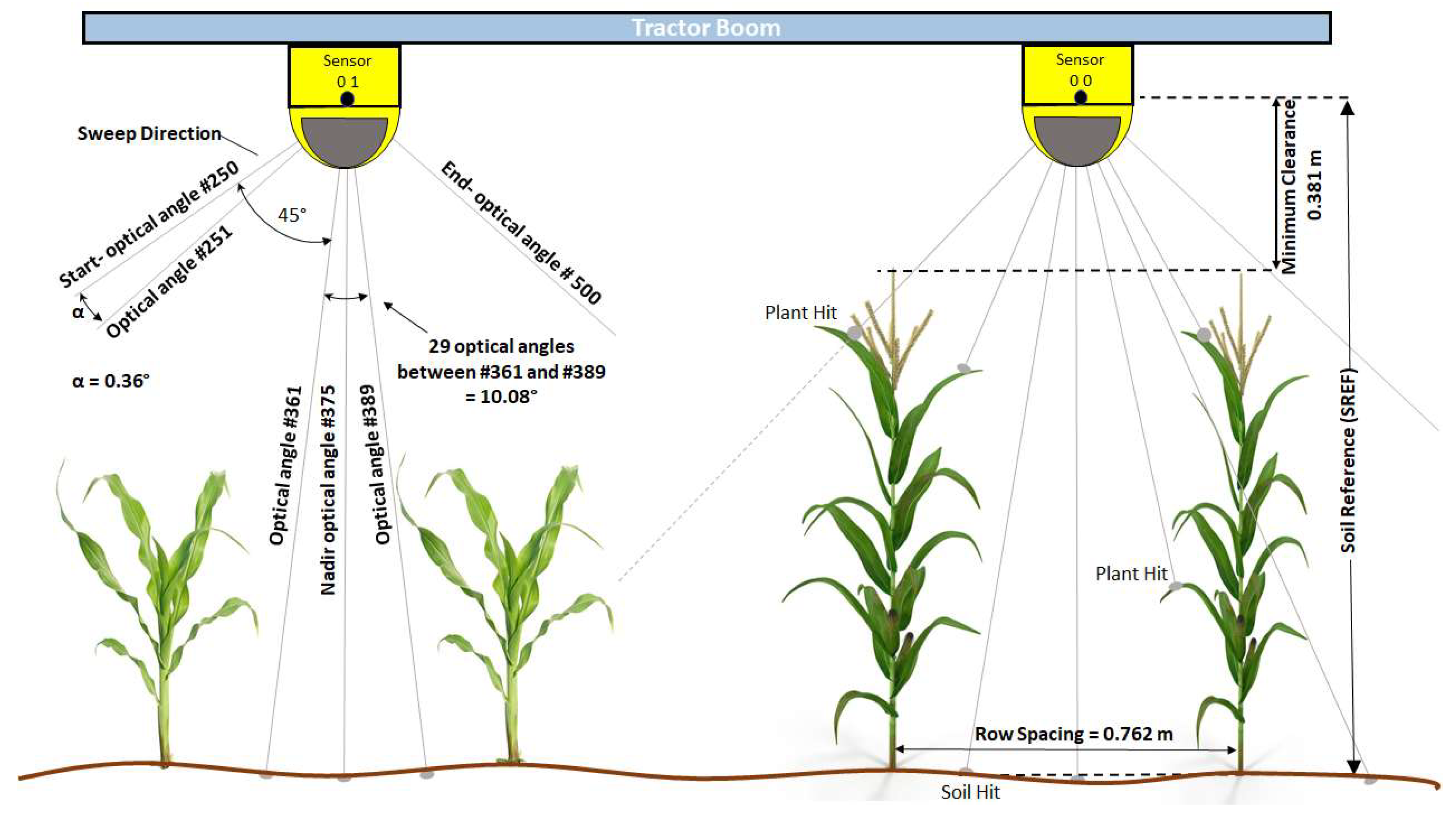
2.2.2. Platform Installation and Sensor Alignment
2.2.3. Lidar Controller
2.2.4. System Networking: Sensor-Controller-Logger
2.2.5. Sensor Optimization for Data Reduction
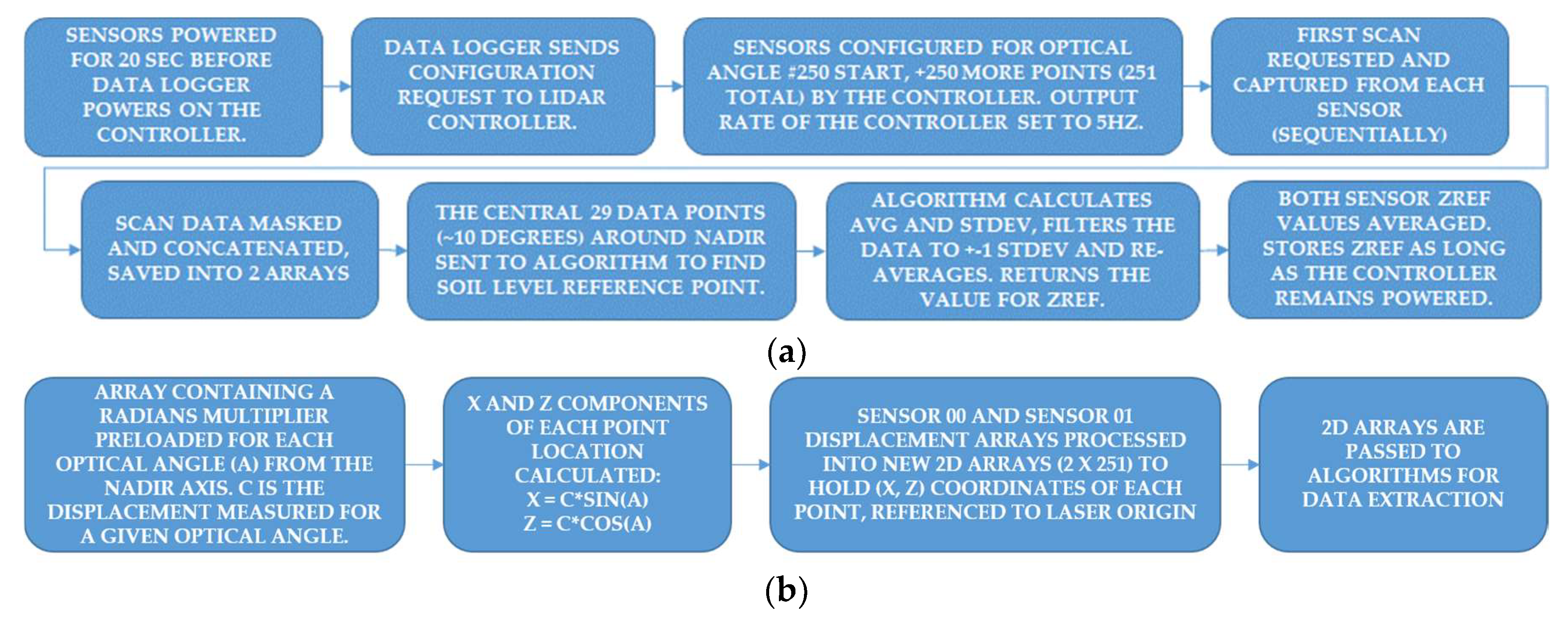
2.2.6. In-Field Sensor Initialization and Field Scan
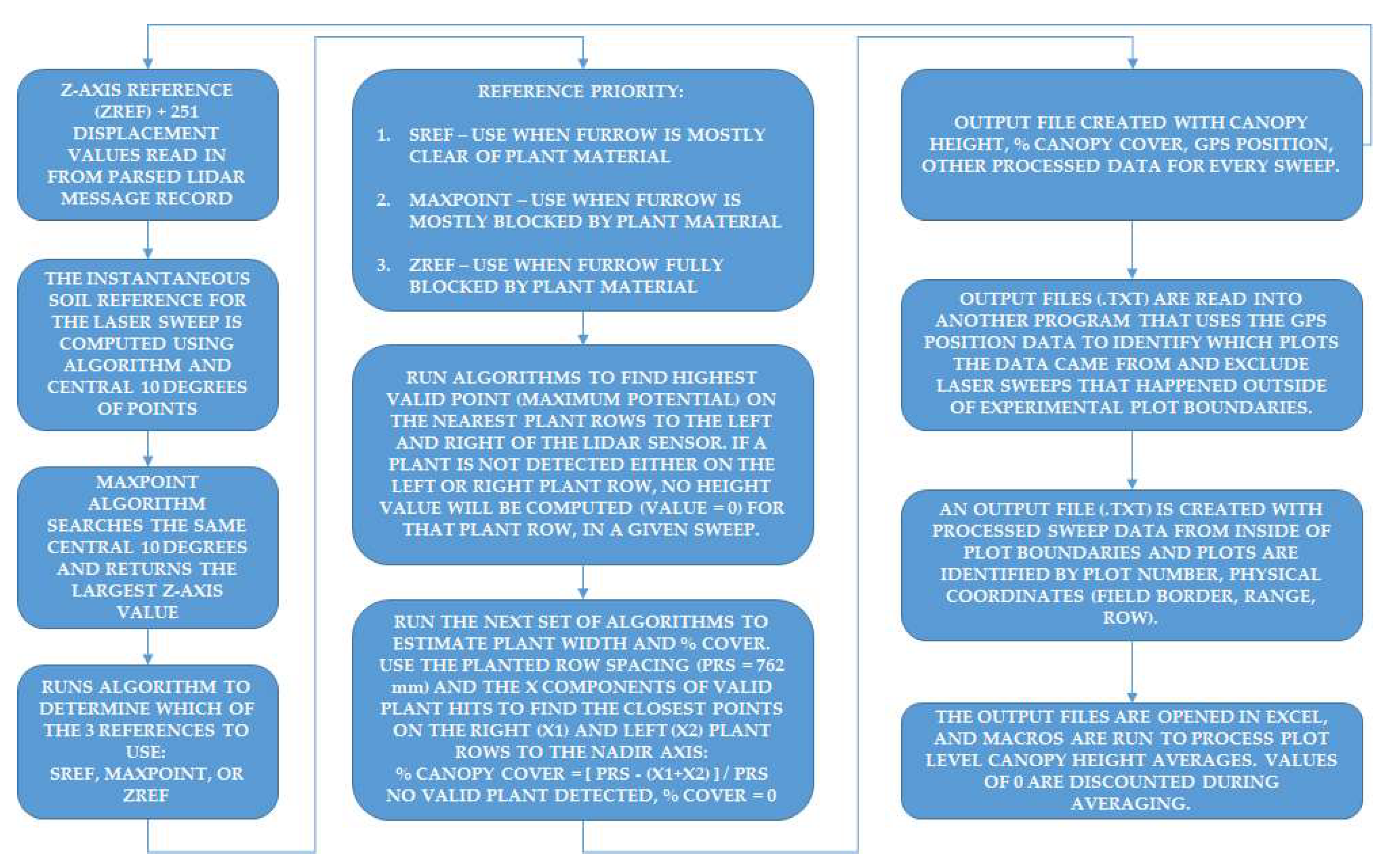
2.2.7. Post-Processing and Parameter Extraction of Lidar Data
2.3. Lidar Data Validation and Visualization
2.4. Genetic Analyses of Geometric Parameters Derived from Lidar Data
3. Results
3.1. Ground Platform Field Deployment and Lidar Data Generation
- Logger output text files (.DAT) in Compact Flash (CF) cards; 2.44 h of data collection = 106.2 MB
- Reformatting for post-processor/output product extractor = 91. 5 MB → 10 min.
- Processing output files (C++ program) = 7.587 MB → 3 min.
- Run plot identifier and remove data from plot alleys (C++ program) = 5.907 MB → 25 s.
- Run plot summary macros (MS Excel macro) = 316 kB → 10 s.
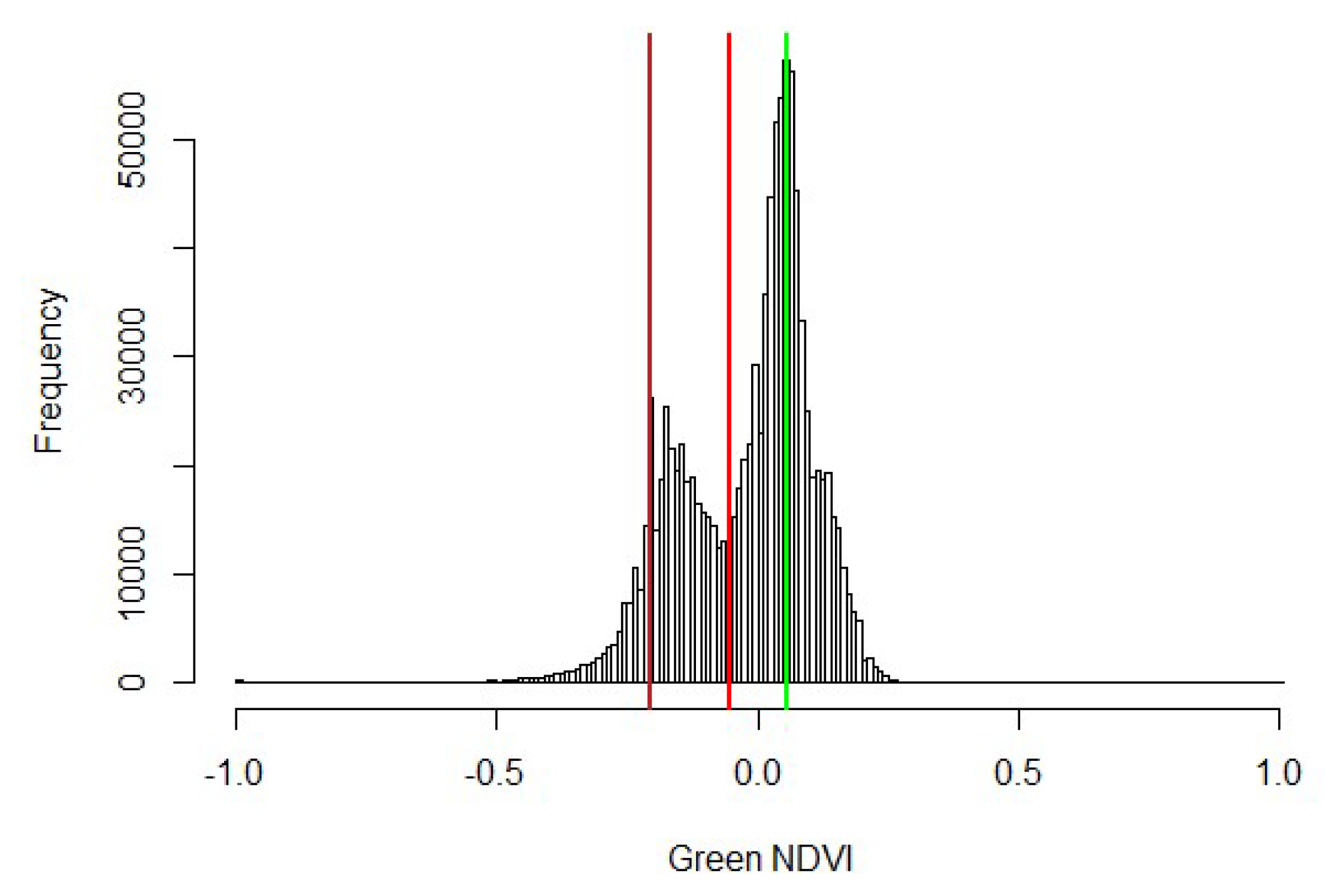
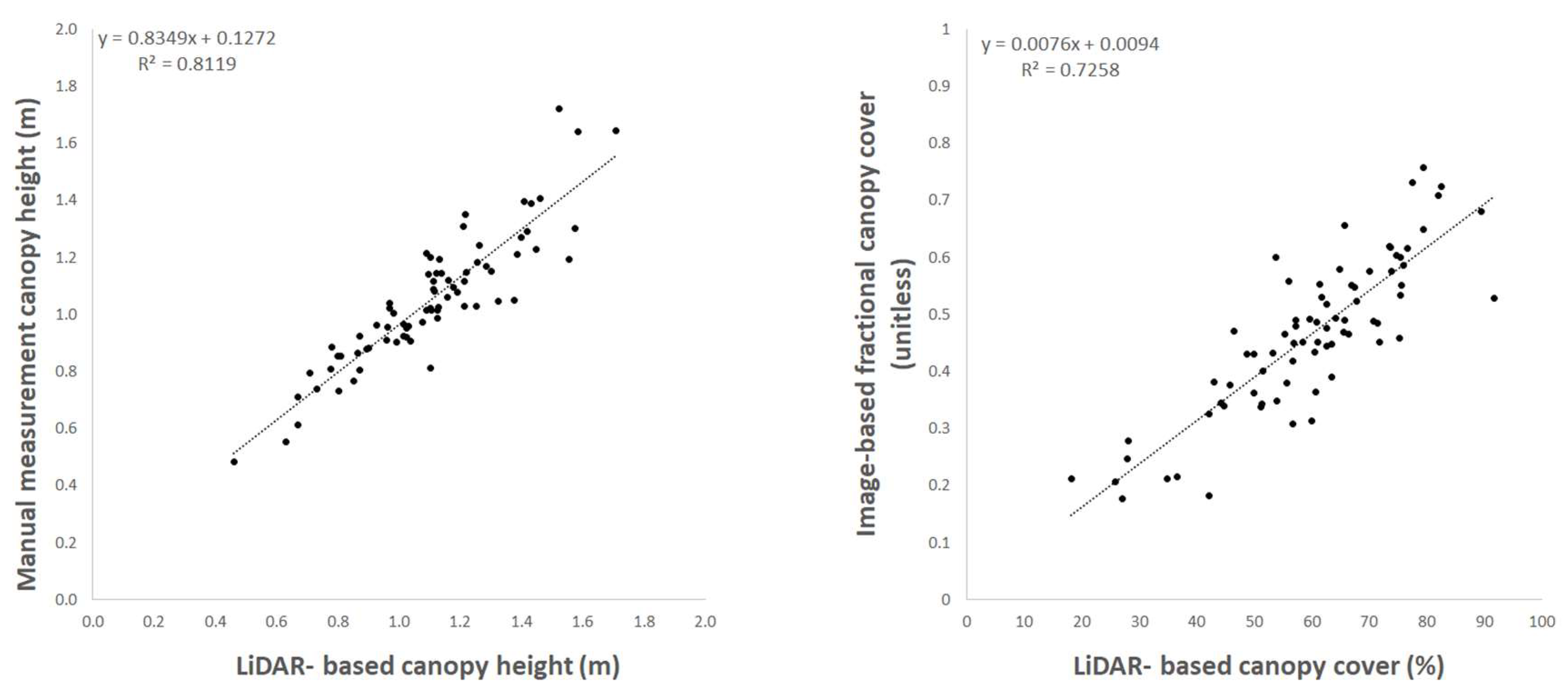
3.2. Validation of Lidar-Generated Canopy-Height and Canopy-Cover Parameters
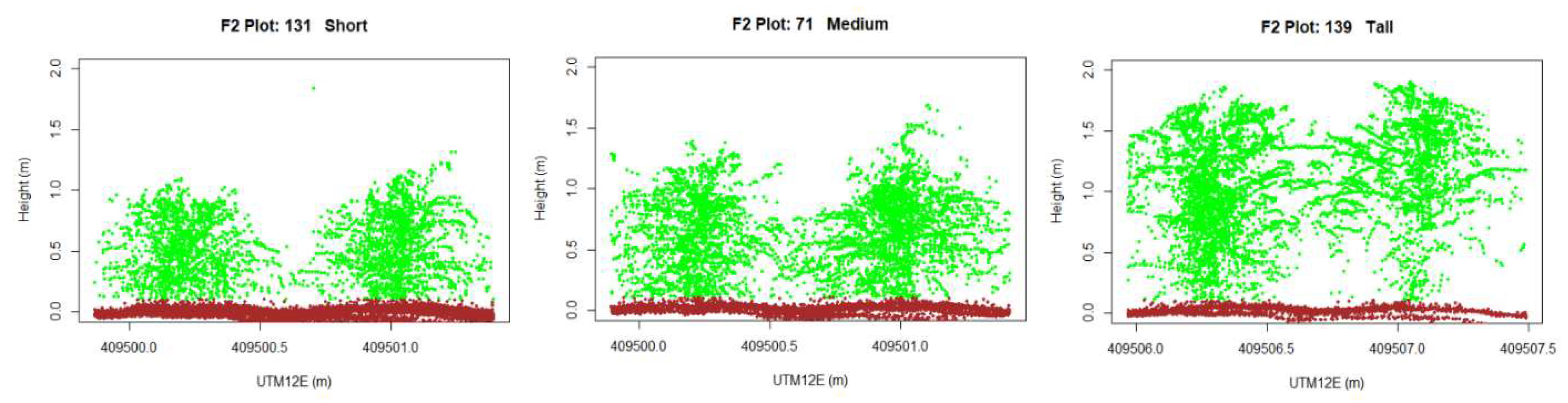
3.3. Visualization of Lidar Data
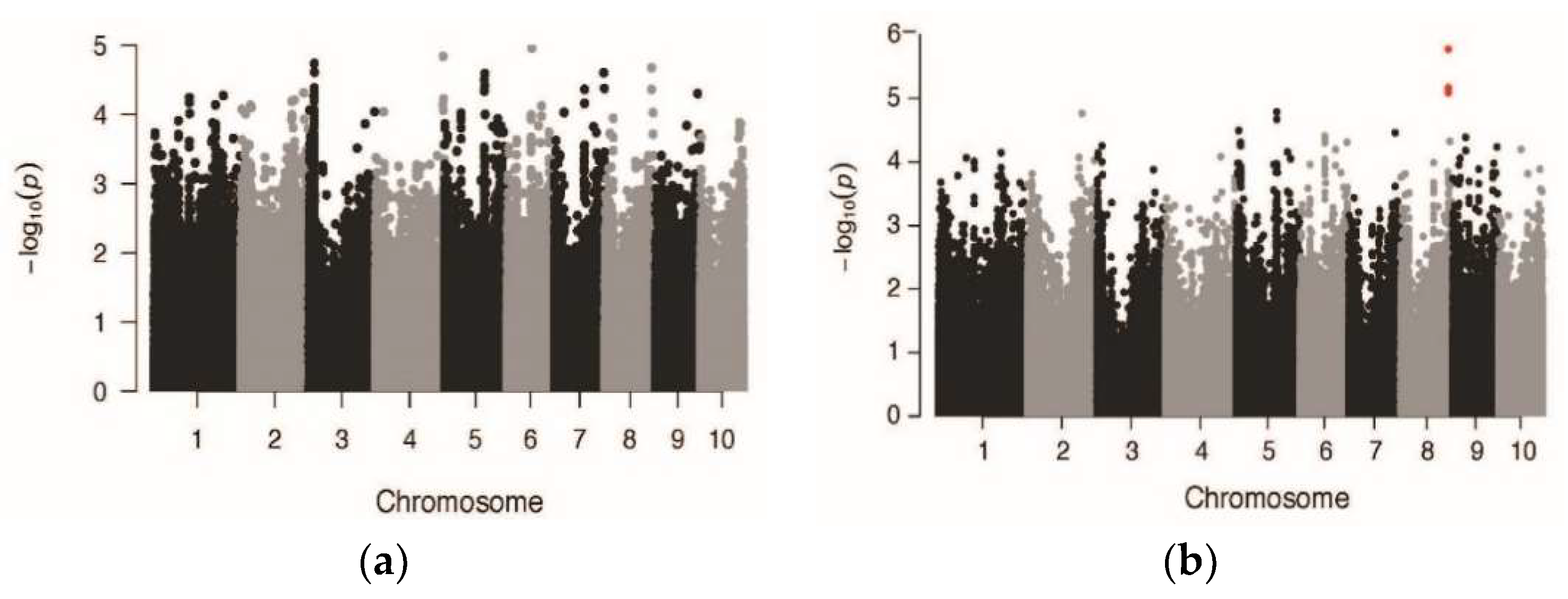
3.4. Application of Lidar Phenotyping to Quantitative Trait Locus (QTL) Identification
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Lan, Y.; Zhang, H.; Lacey, R.; Hoffman, W.; Wu, W. Development of an integration sensor and instrumentation system for measuring crop conditions. Agric. Eng. Int. CIGR J. 2009, 11, 1–16. [Google Scholar]
- Watanabe, K.; Guo, W.; Arai, K.; Takanashi, H.; Kajiya-Kanegae, H.; Kobayashi, M.; Yano, K.; Tokunaga, T.; Fujiwara, T.; Tsutsumi, N.; et al. High-throughput phenotyping of sorghum plant height using an unmanned aerial vehicle and its application to genomic prediction modeling. Front. Plant Sci. 2017, 8, 421. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- White, J.W.; Andrade-Sanchez, P.; Gore, M.A.; Bronson, K.F.; Coffelt, T.A.; Conley, M.M.; Feldmann, K.A.; French, A.N.; Heun, J.T.; Hunsaker, D.J.; et al. Field-based phenomics for plant genetics research. Field Crops Res. 2012, 133, 101–112. [Google Scholar] [CrossRef]
- Andrade-Sanchez, P.; Gore, M.A.; Heun, J.T.; Thorp, K.R.; Carmo-Silva, E.; French, A.N.; Salvucci, M.E.; White, J.W. Development and evaluation of a field-based high-throughput phenotyping platform. Funct. Plant Biol. 2014, 41, 68–79. [Google Scholar] [CrossRef] [Green Version]
- Comar, A.; Burger, P.; de Solan, B.; Baret, F.; Daumard, F.; Hanocq, J.F. A semi-automatic system for high throughput phenotyping wheat cultivars in-field conditions: Description and first results. Funct. Plant Biol. 2018, 39, 914–924. [Google Scholar] [CrossRef]
- Montes, J.M.; Melchinger, A.E.; Reif, J.C. Novel throughput phenotyping platforms in plant genetic studies. Trends Plant Sci. 2007, 12, 433–436. [Google Scholar] [CrossRef]
- Qiu, Q.; Sun, N.; Bai, H.; Wang, N.; Fan, Z.; Wang, Y.; Meng, Z.; Li, B.; Cong, Y. Field-based high-throughput phenotyping for Maize plant using 3D LiDAR point cloud generated with a “Phenomobile”. Front. Plant Sci. 2019, 10, 554. [Google Scholar] [CrossRef] [Green Version]
- Corn Staging for Crop Management. Available online: https://www.gov.mb.ca/agriculture/crops/production/grain-corn/print,control-weed (accessed on 23 October 2019).
- Peiffer, J.A.; Romay, M.C.; Gore, M.A.; Flint-Garcia, S.A.; Zhang, Z.; Millard, M.J.; Gardner, C.A.C.; McMullen, M.D.; Holland, J.B.; Bradbury, P.J.; et al. The genetic architecture of maize height. Genetics 2014, 196, 1337–1356. [Google Scholar] [CrossRef] [Green Version]
- Cai, H.; Chu, Q.; Gu, R.; Yuan, L.; Liu, J.; Zhang, X.; Chen, F.; Mi, G.; Zhang, F. Identification of QTLs for plant height, ear height and grain yield in maize (Zea mays L.) in response to nitrogen and phosphorus supply. Plant Breed. 2012, 131, 502–510. [Google Scholar] [CrossRef]
- Lima, M.D.A.; de Souza, C.L.; Bento, D.A.V.; de Souza, A.P.; Garcia, L.A.C. Mapping QTL for grain yield and plant traits in a tropical maize population. Mol. Breed. 2006, 17, 227. [Google Scholar] [CrossRef]
- Lin, Y.R.; Schertz, K.F.; Paterson, A.H. Comparative analysis of QTLs affecting plant height and maturity across the Poaceae, in reference to an interspecific sorghum population. Genetics 1995, 141, 391–411. [Google Scholar] [PubMed]
- Zhang, L.; Grift, T.E. A LIDAR-based crop height measurement system for Miscanthus giganteous. Comput. Electron. Agric. 2012, 85, 70–76. [Google Scholar] [CrossRef]
- Martínez-Guanter, J.; Garrido-Izard, M.; Valero, C.; Slaughter, D.C.; Pérez-Ruiz, M. Optical sensing to determine tomato plant spacing for Precise Agrochemical Application: Two scenarios. Sensors 2017, 17, 1096. [Google Scholar] [CrossRef] [Green Version]
- Méndez, V.; Catalán, H.; Rosell-Polo, J.R.; Arnó, J.; Sanz, R. LiDAR simulation in modelled orchards to optimise the use of terrestrial laser scanners and derived vegetative measures. Biosyst. Eng. 2013, 115, 7–19. [Google Scholar] [CrossRef] [Green Version]
- Sanz, R.; Llorens, J.; Escolà, A.; Arnó, J.; Planas, S.; Román, C.; Rosell-Polo, J.R. LIDAR and non-LIDAR-based canopy parameters to estimate the leaf area in fruit trees and vineyard. Agric. For. Meteorol. 2018, 260, 229–239. [Google Scholar] [CrossRef]
- Paulus, S.; Schumann, H.; Kuhlmann, H.; Léon, J. High-precision laser scanning system for capturing 3D plant architecture and analysing growth of cereal plants. Biosyst. Eng. 2014, 121, 1–11. [Google Scholar] [CrossRef]
- Jimenez-Berni, J.A.; Deery, D.M.; Rozas-Larraondo, P.; Condon, A.G.; Rebetzke, G.J.; James, R.A.; Bovill, W.D.; Furbank, R.T.; Sirault, X.R.R. High throughput determination of plant height, ground cover, and above ground biomass in wheat with LiDAR. Front. Plant Sci. 2018, 9, 237. [Google Scholar] [CrossRef] [Green Version]
- Madec, S.; Baret, F.; de Solan, B.; Thomas, S.; Dutartre, D.; Jezequel, S.; Hemmerlé, M.; Colombeau, G.; Comar, A. High-Throughput Phenotyping of Plant Height: Comparing Unmanned Aerial Vehicles and Ground LiDAR Estimates. Front. Plant Sci. 2017, 8, 2002. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Singh, D.; Marla, S.; Morris, G.; Poland, J. Field-based high-throughput phenotyping of plant height in sorghum using different sensing technologies. Plant Methods 2018, 14, 53. [Google Scholar] [CrossRef]
- Yuan, W.; Li, J.; Bhatta, M.; Shi, Y.; Baenziger, P.S.; Ge, Y. Wheat height estimation using LiDAR in comparison to ultrasonic sensor and UAS. Sensors 2018, 18, 3731. [Google Scholar] [CrossRef] [Green Version]
- Keyence America. Available online: https://www.keyence.com/products/safety/laser-scanner/sz/downloads/ (accessed on 23 October 2019).
- Weka Segmentation Tool Plugin for ImageJ. Available online: https://imagej.net/Trainable_Weka_Segmentation (accessed on 17 October 2019).
- Cloud Compare. Available online: https://www.danielgm.net/cc/ (accessed on 17 October 2019).
- Bradbury, P.J.; Zhang, Z.; Kroon, D.E.; Casstevens, T.M.; Ramdoss, Y.; Buckler, E.S. TASSEL: Software for association mapping of complex traits in diverse samples. Bioinformatics 2007, 23, 2633–2635. [Google Scholar] [CrossRef] [PubMed]
- Leiboff, S.; Li, X.; Hu, H.C.; Todt, N.; Yang, J.; Li, X.; Yu, X.; Muehlbauer, G.J.; Timmermans, M.C.; Yu, J.; et al. Genetic control of morphometric diversity in the maize shoot apical meristem. Nat. Commun. 2015, 6, 8974. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chuck, G.S.; Whipple, C.J.; Jackson, D.; Hake, S. The maize SBP-box transcription factor encoded by tasselsheath4 regulates bract development and the establishment of meristem boundaries. Development 2010, 137, 1243–1250. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chuck, G.S.; Brown, P.; Meeley, R.; Hake, S. Maize SBP-box transcription factors unbranched2 and unbranched3 affect yield traits by regulating the rate of lateral primordia initiation. Proc. Natl. Acad. Sci. USA 2014, 111, 18775–18780. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Visscher, P.M. Sizing up human height variation. Nat. Genet. 2008, 40, 5. [Google Scholar] [CrossRef] [PubMed]
- Wood, A.R.; Esko, T.; Yang, J.; Vedantam, S.; Pers, T.H.; Gustafsson, S.; Chu, A.Y.; Estrada, K.; Luan, J.A.; Kutalik, Z.; et al. Defining the role of common variation in the genomic and biological architecture of adult human height. Nat. Genet. 2014, 46, 1173–1186. [Google Scholar] [CrossRef] [PubMed] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DAP | Genotype ID/Morphology Class | |||||
|---|---|---|---|---|---|---|
| WIL500/Short | Z022E0104/Medium | SC357/Tall | ||||
| CH-m | CC-% | CH-m | CC-% | CH-m | CC-% | |
| 22 | 0.09 (0.07) | – | 0.12 (0.09) | 1.5 (8.6) | 0.24 (0.10) | 13.9 (10.8) |
| 28 | 0.17 (0.09) | 2.8 (8.5) | 0.24 (0.11) | 6.5 (13.6) | 0.40 (0.14) | 23.3 (13.8) |
| 34 | 0.23 (0.10) | 6.9 (10.9) | 0.29 (0.10) | 19.8 (18.9) | 0.57 (0.14) | 34.7 (12.1) |
| 40 | 0.27 (0.12) | 9.0 (11.5) | 0.39 (0.11) | 28.3 (18.8) | 0.75 (0.25) | 41.1 (20.1) |
| 47 | 0.38 (0.16) | 10.2 (11.3) | 0.61 (0.12) | 45.7 (29.6) | 1.01 (0.30) | 63.4 (30.9) |
| 64 | 0.78 (0.31) | 18.2 (19.4) | 1.11 (0.29) | 49.9 (25.0) | 1.52 (0.40) | 73.7 (27.5) |
| Treatment | Genetic Correlation between Manual Shoot Dry Mass and Lidar-Based CH | Shoot Dry Mass Heritability (%) | Lidar-Based CH Heritability (%) |
|---|---|---|---|
| Well-irrigated | 0.70 * | 59.4 | 78.0 |
| Drought-stressed | 0.68 * | 42.8 | 72.7 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heun, J.T.; Attalah, S.; French, A.N.; Lehner, K.R.; McKay, J.K.; Mullen, J.L.; Ottman, M.J.; Andrade-Sanchez, P. Deployment of Lidar from a Ground Platform: Customizing a Low-Cost, Information-Rich and User-Friendly Application for Field Phenomics Research. Sensors 2019, 19, 5358. https://doi.org/10.3390/s19245358
Heun JT, Attalah S, French AN, Lehner KR, McKay JK, Mullen JL, Ottman MJ, Andrade-Sanchez P. Deployment of Lidar from a Ground Platform: Customizing a Low-Cost, Information-Rich and User-Friendly Application for Field Phenomics Research. Sensors. 2019; 19(24):5358. https://doi.org/10.3390/s19245358
Chicago/Turabian StyleHeun, John T., Said Attalah, Andrew N. French, Kevin R. Lehner, John K. McKay, Jack L. Mullen, Michael J. Ottman, and Pedro Andrade-Sanchez. 2019. "Deployment of Lidar from a Ground Platform: Customizing a Low-Cost, Information-Rich and User-Friendly Application for Field Phenomics Research" Sensors 19, no. 24: 5358. https://doi.org/10.3390/s19245358