1. Introduction
Technological advances related to the development of unmanned aircrafts for atmospheric observations make it possible to carry out measurements in areas at very low heights that are difficult to reach by piloted aircrafts, thus covering a wider airspace for collecting meteorological data. The unmanned aerial vehicle (UAV) offers an opportunity to investigate the atmospheric surface layer (ASL) in a way that is complementary to other platforms such as instrumented towers/masts, radiosondes, and piloted airplanes, thereby filling the gap between all available fixed and mobile platforms.
The ASL is the layer at the bottom of the atmospheric boundary layer (ABL), which directly interacts with the surface of the earth [
1]. In general, it is some tens of meters thick [
2]. It is characterized by a high variability, both in time (related to the diurnal cycle) and along the vertical; shearing stress is constant in the vertical and the flow is insensitive to the earth’s rotation. Profiles of meteorological parameters, such as temperature, moisture, wind, and turbulence, vary substantially from the surface to the top of the ASL. These follow for example, logarithmic laws or even more complex shapes according to the surface characteristics and turbulence conditions. The two sources of ASL turbulence are friction and buoyancy. The former results from the momentum extracted from the flow, and the latter from the difference in temperature (and, at a lower level, of moisture) between the surface and the air above it. Turbulence is three-dimensional and isotropic, at least for the smaller eddies, which are well described by the “K-41 theory” (Kolmogorov, 1941) on the inertial sub-range and its famous “−5/3 slope” for the spectral energy.
Very high level of ASL knowledge is required for both academic research and practical applications. For example, improving turbulent exchange parameterization in a numerical weather prediction model, or estimating wind turbine wake characteristics require appropriate observations in the ASL. The most important parameters to measure are the temperature, moisture, and wind, at a rate fast enough to capture eddies that significantly contribute to the turbulence energy. Starting from the know-how built up in past decades regarding observations aboard piloted airplanes (see e.g., [
3]), and thanks to the miniaturization of sensors and acquisition systems, numerous unmanned aerial systems (UASs) have been developed in recent years all over the world. Similarly to on-board piloted airplanes, many developments were made to characterize the surface overflown, through remote sensing instruments. However, in this paper, we will focus on in situ observations of meteorological parameters and turbulence.
The UAVs were classified according to three main categories, depending on their weight and their payload capacity [
4]. The first category regroups all UAVs weighing 10–30 kg, such as for example the Manta, ScanEagle, Aerosonde, and RPMSS (Robotic Plane Meteorological Sounding System); their advantage is their endurance and their highest payload capacity, but they are very expensive and often difficult to operate. The Manta (27.7 kg) and ScanEagle (22 kg), in particular, were used for turbulent flux measurements within terrestrial and marine ABL; wind components and humidity were measured up to 25 Hz and temperature up to 5 Hz [
5]. Similarly, ALADINA (Application of Light-weight Aircraft for Detecting IN situ Aerosol) (25 kg) was elaborated for measuring boundary-layer properties, atmospheric particles, and solar radiation, as well as turbulence up to a frequency of ~7 Hz [
6].
Secondly, category II includes vehicles that weigh more than 1 kg and less than 10 kg such as the Tempest, the meteorological mini unmanned aerial vehicle (M
2AV), the NexSTAR, the multipurpose automatic sensor carrier (MASC), and the small multifunction autonomous research and teaching sonde (SMARTSonde). Although these UAVs are smaller, and have less payload capacity and autonomy of flight than the vehicles in category I, they can carry many of the sensors used for wind measurements. In addition to this, their cost is moderate, which makes them more easily deployable. For instance, M
2AV (6 kg) measures the meteorological wind up to 40 Hz, equivalent to a spatial resolution of 55 cm at an airspeed of 22 m/s, by coupling a GPS and an inertial measurement unit (IMU) with a Kalman filter, and combining data with a five-hole probe for which the calibration had been obtained during a wind tunnel test [
7]. M
2AV and MASC were also used to assess the accuracy and frequency response of a multi-hole probe [
8], and finally they can measure fluctuations up to 20 Hz after re-evaluating the pneumatic tubing setup and data acquisition. MASC was also operated for wind energy research [
9]. Moreover, the BLUECAT5 (5 kg), developed for turbulence measurements in the ABL, could measure turbulence with a sampling of 60 Hz, by following a profile pattern at loiter radius [
10]. However, the circular flight pattern prevents the conversion of time series into spatial scales, except for high rates (small scales) where air sampling can be considered as straight.
Finally category III assembles UAVs that weigh less than 1 kg, for instance the small unmanned meteorological observer (SUMO) and DataHawk, which have limited payload capacity and endurance compared with the two other categories. Their cost and facility of deployment enable small experiments to be carried out from anywhere. SUMO efficiently captures meteorological profiles of wind speed, wind direction, temperature, and humidity [
11,
12]. Moreover, capabilities and limitations for turbulence observations are described in Reference [
13].
Furthermore, different field campaigns have been conducted using UAVs. For instance, SUMO, MASC, and two multicopters participated in the Hailuoto 2017 field campaign in the arctic, in order to increase the understanding of the stable boundary layer by complementing the existing observation systems—like ground-based eddy covariance and automatic weather stations. This large set of data brought insights into the nature of turbulent events that induce rapid warming of layers close to the ice surface [
14]. During the CLOUD-MAP campaign, thanks to a great amount of work on sensor integration and calibration/validation, atmospheric sampling of thermodynamic parameters and boundary-layer profiling were done with fixed and rotary wings UASs [
15]. Additionally, UAVs are used for specific atmospheric issues as pollution and trace gas monitoring: a six-rotor UAS was used for studying air pollution episode characteristics and influential mechanisms that occurred in Nanjing during the 3–4 December 2017 [
16]. On the other hand, three types of UAV including micro aerial vehicles (MAVs), vertical take-off and landing (VTOL), and low-altitude short endurance (LASE) systems, were evaluated to operate three kinds of atmospheric trace gas sensors. The best compromise was given by UAVs, which have wingspans <3 m for payloads <5 kg [
17].
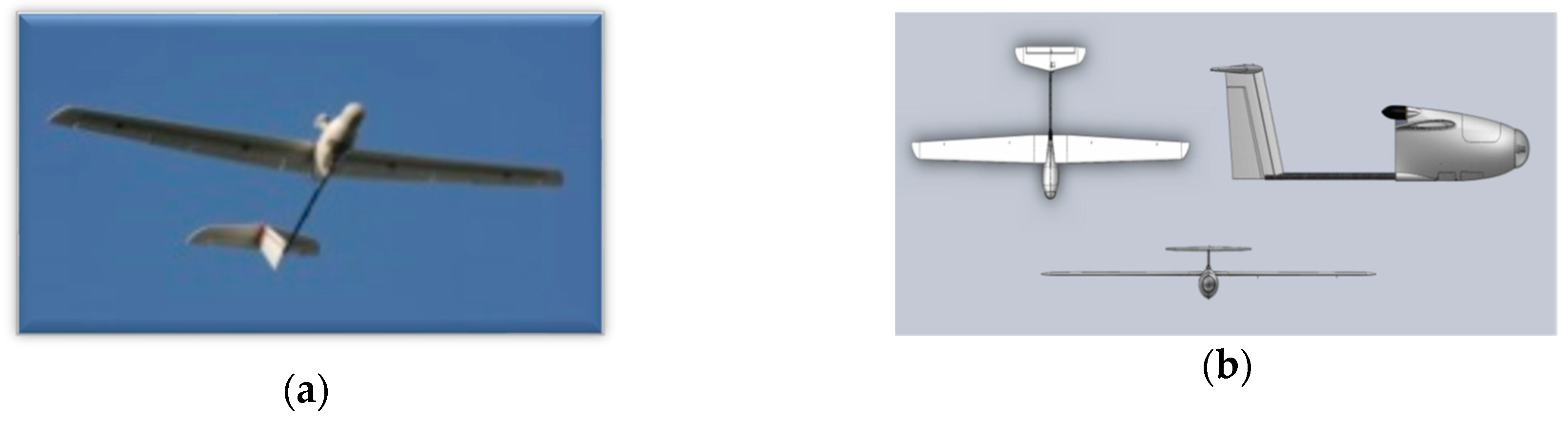
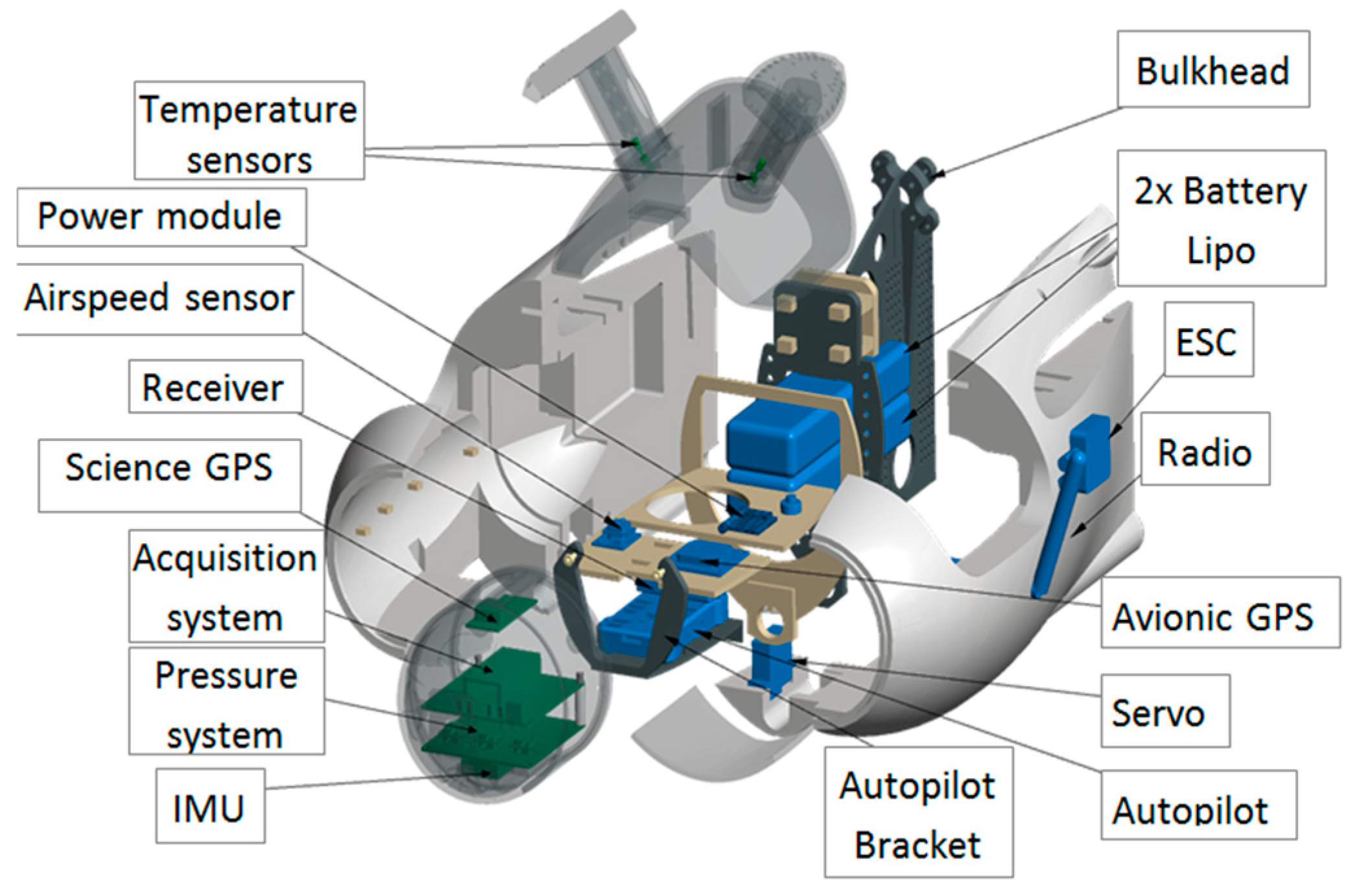
The unmanned aerial vehicle OVLI-TA (“Objet Volant Leger Instrumenté–Turbulence Atmosphérique”, that is instrumented light aerial vehicle-atmospheric turbulence) belongs to the second category of UAVs. OVLI-TA was developed at Laboratoire d’Aérologie in Toulouse, France. The purpose was to develop a low cost system able to fly at low altitudes and easy to deploy; that may measure temperature, humidity, wind vector, and observe turbulence within the ABL. One of the unique attributes of the OVLI-TA system with respect to comparable UAVs is that its nose serves as a five-hole probe, which is 3D printed, easy to manufacture, and allows us to install the inertial platform and aerodynamic sensors in the same location. Thus, when solving the 3-component wind equation (see
Section 2), even at a rate fast enough to capture turbulent scales, all the terms with angular rotations can be neglected. Whereas, they must be taken into account when using systems based on a multi-hole probe placed at the extremity of a boom. Furthermore, tubing length effects on pressure measurements are eliminated in our system because the transducers can be installed as close as possible to the pressure ports. Regarding UAV performance, our choice was guided by a compromise between a system small enough to be easy to operate, and large enough to allow a payload compatible with a good-quality sensors package and an endurance compatible with atmospheric boundary layer probing. With our system, the autonomy of flight was at least one hour. Moreover, even if OVLI-TA is lighter (3.5 kg) than other category 2 UAVs (e.g., 6 kg for the M
2AV and 5 to 7.5 kg for the MASC), it permits comparable horizontal resolution. In addition to the hemispherical 5-hole probe situated on the nose of the airplane to measure attack and sideslip angles, there is a Pitot probe, a fast IMU, a GPS receiver, as well as temperature and moisture sensors placed in specific housings. Its cost is affordable, and hence we can risk flying in areas with turbulent conditions. OVLI-TA is mainly a system for profiling the atmospheric boundary layer, it also has the capacity to measure turbulence properly. Several flights were conducted in Lannemezan (France), where there is an equipped 60 m tower that was a reference to our measurements. The drone then participated in the international project DACCIWA (Dynamics-Aerosol-Chemistry-Clouds Interactions in West Africa), in Benin.
This paper gives a technical description of OVLI-TA, and highlights the results of profiling the atmospheric boundary layer obtained during flights in Lannemezan and in DACCIWA. The performance for measuring the mean meteorological parameters was evaluated against the 60 m tower and radiosonde profiles. Furthermore, turbulence observations on the tower and with the UAV were compared through a time–space conversion based on Taylor’s hypothesis applied to the two platforms.
4. Discussion
The development of the small, unmanned aerial system OVLI-TA for probing the ASL/ABL makes it possible to explore atmospheric layers as a complementary method to towers and other platforms. OVLI-TA is easy to operate, in a category of UASs for which the air traffic rules remain acceptable, avoiding the constraints we have to deal with for heavier airplanes. Nevertheless, the payload capacity (~2 kg) allows us to embark high-performance instrumentation, composed of atmospheric sensors, an inertial platform, and an efficient autopilot. This instrument package has revealed its capacity to measure the temperature, humidity, and wind components all along the aircraft’s trajectory. In particular, the three wind components, although hard to compute on mobile platforms, can be estimated not only for their mean value, but also for the turbulent fluctuations. In particular, the instantaneous values of the airspeed vector, required for these calculations, are computed from a multi-hole probe installed on the nose of the airplane, and calibrated in a wind-tunnel for the estimates of attack and sideslip angles.
The quality of the measurements was determined from self-consistency methods and also by comparison with other measurements on platforms considered as a reference. For temperature and humidity profiles, we checked the similarity between the observations collected during ascending and descending flight profiles, and compared the observations to those obtained with radiosonde profiles. From the difference between up- and down-ward profiles performed in a short time range, we estimated the response times of the temperature and relative humidity probes, as around nine and 15 s, respectively. With a profiling vertical speed around 1 m/s, this allows us to lower the bias of the observed profiles at a level twice that of the radiosonde under meteorological balloons. For wind speed and direction, the variability of the estimates during back and forth runs, allowed us to adjust calibration coefficients and reduce the scatter of the estimates. Comparison with the 60 m tower observations revealed an excellent agreement, even though the air mass sensed by the two platforms was not identical. The absolute accuracy of the wind components is better than 1 m/s, because this value, deduced from the difference between drone and tower estimates, involves at least in part the atmospheric variability. The turbulence spectra, computed on straight and level flight sequences, revealed the expected slope in the inertial sub-range, up to a frequency of about 10 Hz. We compared these spectra with those computed from the tower observations, once the transformation of frequency into wavenumber had been done according to the sample velocity of each platform. The spectra agree as well as it can be expected, given the difference between the footprints of the two platforms. In addition, a scatter plot of power density of the mast against OVLI-TA confirms that the agreement is good up to 10 Hz.
The OVLI-TA platform is able to sample ABL turbulence with a spatial resolution of around 1 m. We can question whether this allows us to capture most of the energetic turbulence. In fact, 3D turbulence spectra in the ASL, when represented in the unit of variance, are characterized by a peak occurring at a certain frequency, with the energy decreasing on each side of the peak [
22]. We can consider that the turbulence observation is appropriate when the sampling frequency of the measures is at least one order of magnitude higher than that of the peak. Starting from the surface, this peak shifts continuously towards lower frequencies (larger wavelengths) when the observation height increases, because the size of eddies grows with the distance from the surface. For convective, daytime conditions, we can expect a peak wavelength of the order of 3–5 z, where z is the height above the ground [
22,
23]. That means that at z = 10 m, which is the lowest height at which the drone could be reasonably operated, we are able to resolve eddies of a size 30–50 times smaller than the most energetic ones, and therefore most of the significant turbulence energy can be captured.
5. Conclusions
OVLI-TA is a small affordable UAV, developed in France. It was instrumented for profiling the ABL and measuring turbulence. It flew in two different sites, Lannemezan (France) and Savé (Bénin). From the comparison between OVLI-TA and respectively the 60 m tower and “radiosondes” measurements, we demonstrated its efficiency in measuring the turbulence up to 10 Hz, which is equivalent to a horizontal resolution of around 1 m. In spite of the quite slow temperature and moisture sensors, the UAV is able to give reliable profiles in the ABL provided that the vertical speed of the aircraft is kept slow (~1 m/s).
In the near future, we plan to extend OVLI-TA’s capabilities with fast response temperature and moisture sensors. This will give us the possibility to compute kinematic heat and moisture fluxes, which are essential terms in ABL dynamics. Furthermore, we are developing a new instrumentation on a heavier drone, to extend the payload to 5 kg and the endurance to 5–6 h. This will allow us to embark high-performance instruments, in particular for turbulence measurements, and to fly in more adverse conditions, such as strong winds and those with high turbulence. However, the operation of this new system would be more restrictive, especially with regard to flight authorization and operation. We will therefore benefit from the complementarity of the two systems.

 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}