Author Contributions
Conceptualization, Ó.G.-O., L.F.-R., E.A. and M.C.-L.; Data curation, Ó.G.-O.; Investigation, Ó.G.-O., L.F.-R., E.A., M.C.-L. and E.F.; Methodology, Ó.G.-O. and L.F.-R.; Software, Ó.G.-O., E.F.; Supervision, L.F.-R., E.A. and E.F.; Validation, Ó.G.-O., L.F.-R., E.A. and M.C.-L.; Visualization, E.F.; Writing—original draft, Ó.G.-O.; Writing—review & editing, Ó.G.-O., L.F.-R., E.A., M.C.-L. and E.F.
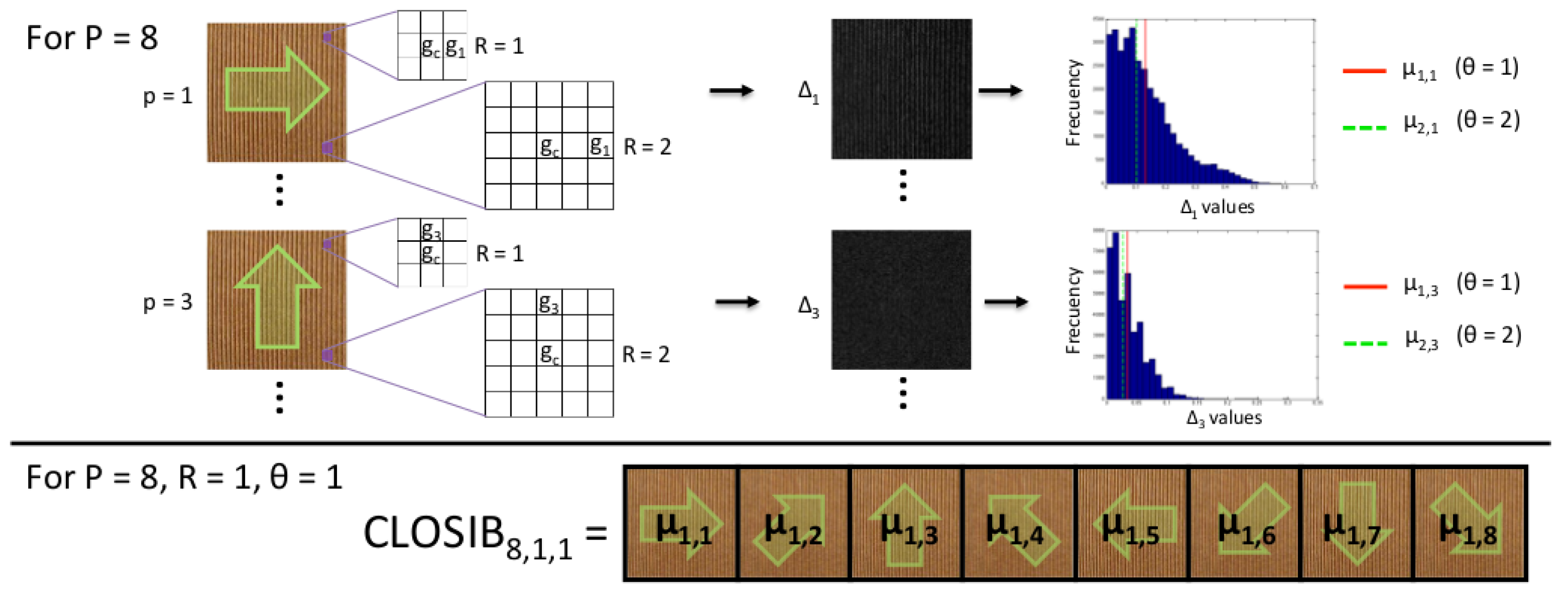
Figure 1.
Overview of Complete Local Oriented Statistical Information Booster (CLOSIB) method. Example about the calculation of CLOSIB on an image.
Figure 1.
Overview of Complete Local Oriented Statistical Information Booster (CLOSIB) method. Example about the calculation of CLOSIB on an image.
Figure 2.
images showing the absolute differences of the gray values for orientations in a neighborhood of radii and . The original image I is shown in the center. The main change in the intensity of the original image occurs in the horizontal direction and .
Figure 2.
images showing the absolute differences of the gray values for orientations in a neighborhood of radii and . The original image I is shown in the center. The main change in the intensity of the original image occurs in the horizontal direction and .
Figure 3.
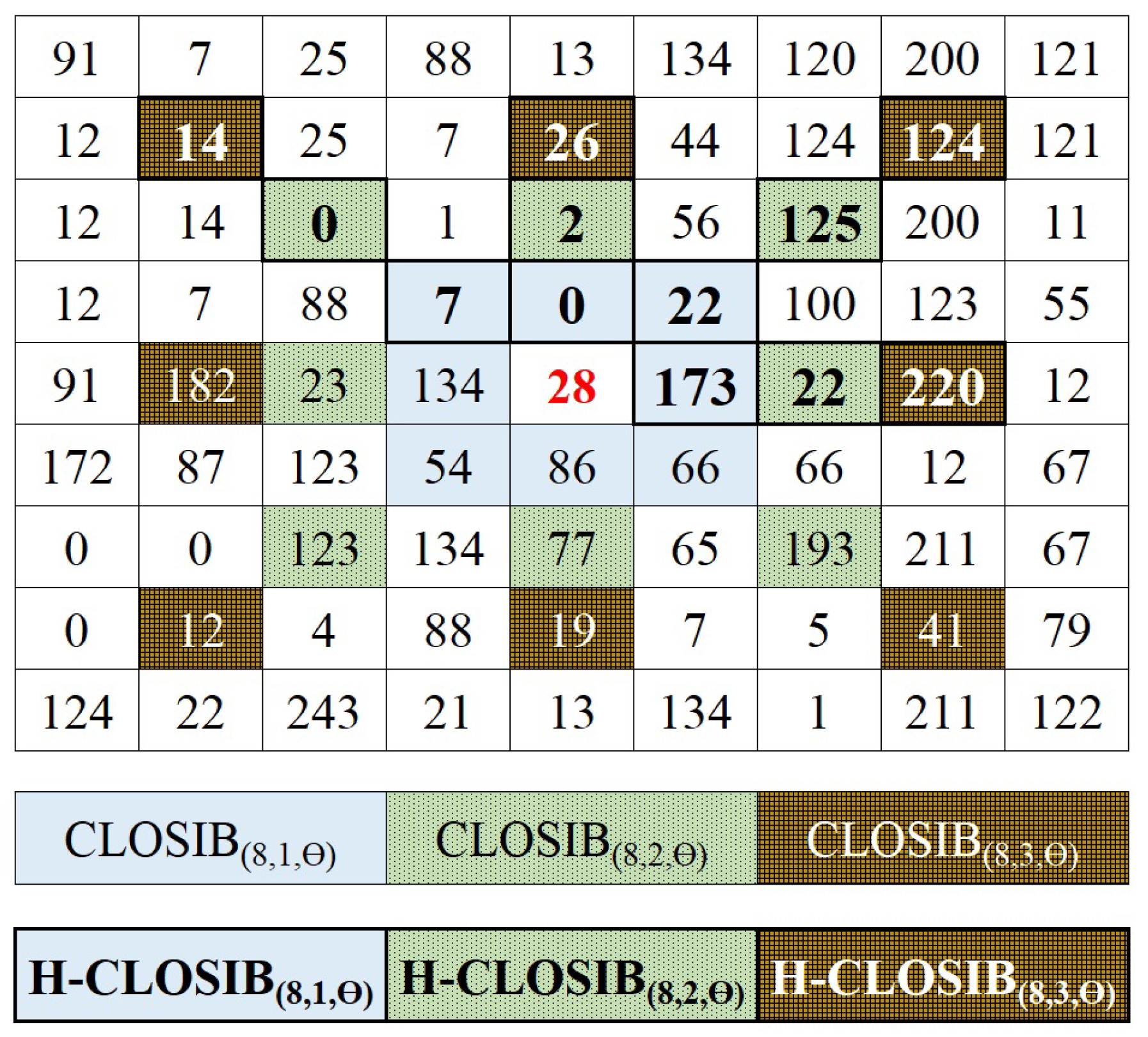
(Better viewed in color) Neighborhood around a center pixel, (28), considered for the computation of M-CLOSIB and HM-CLOSIB. CLOSIB considers P = 8 orientations, while H-CLOSIB only P = 4 orientations. In the figure, neighbour pixels considered for H-CLOSIB are shown in bold.
Figure 3.
(Better viewed in color) Neighborhood around a center pixel, (28), considered for the computation of M-CLOSIB and HM-CLOSIB. CLOSIB considers P = 8 orientations, while H-CLOSIB only P = 4 orientations. In the figure, neighbour pixels considered for H-CLOSIB are shown in bold.
Figure 4.
(a) Circumference that represents the neighborhood considered for the computation of CLOSIB with . Four pairs of neighbors differ in radians, such as the neighbors for values and . (b,c) Schemas that represent the computation of CLOSIB for two different images. We show the original image in the centre and the eight images of the absolute differences of the gray values in the outer layer. The red and green numbers indicate the values of each element of CLOSIB and CLOSIB feature set, respectively, obtained for the corresponding p values of . Note that the values of the elements of CLOSIB computed for neighbors that differ in radians diverge in only a maximum of 0.0002 units whereas the ones that differ in a different angle diverge in at least 0.0006 units.
Figure 4.
(a) Circumference that represents the neighborhood considered for the computation of CLOSIB with . Four pairs of neighbors differ in radians, such as the neighbors for values and . (b,c) Schemas that represent the computation of CLOSIB for two different images. We show the original image in the centre and the eight images of the absolute differences of the gray values in the outer layer. The red and green numbers indicate the values of each element of CLOSIB and CLOSIB feature set, respectively, obtained for the corresponding p values of . Note that the values of the elements of CLOSIB computed for neighbors that differ in radians diverge in only a maximum of 0.0002 units whereas the ones that differ in a different angle diverge in at least 0.0006 units.
Figure 5.
Schemas of the computation of CLOSIB
(
left) and H-CLOSIB
(
right) using the example of
Figure 4c.
Figure 5.
Schemas of the computation of CLOSIB
(
left) and H-CLOSIB
(
right) using the example of
Figure 4c.
Figure 6.
(a) Example of gray values of an Original Image. (b) Matrix obtained from the first difference of the gray values at 0 degrees. It corresponds with the first element of CLOSIB. (d) Matrix obtained from the first difference of the gray values at 180 degrees. It corresponds with the fifth element of CLOSIB. (c) Differences, with sign, at 0 degrees. CLOSIB uses the absolute value of the differences, therefore these values with sign are never computed.
Figure 6.
(a) Example of gray values of an Original Image. (b) Matrix obtained from the first difference of the gray values at 0 degrees. It corresponds with the first element of CLOSIB. (d) Matrix obtained from the first difference of the gray values at 180 degrees. It corresponds with the fifth element of CLOSIB. (c) Differences, with sign, at 0 degrees. CLOSIB uses the absolute value of the differences, therefore these values with sign are never computed.
Figure 7.
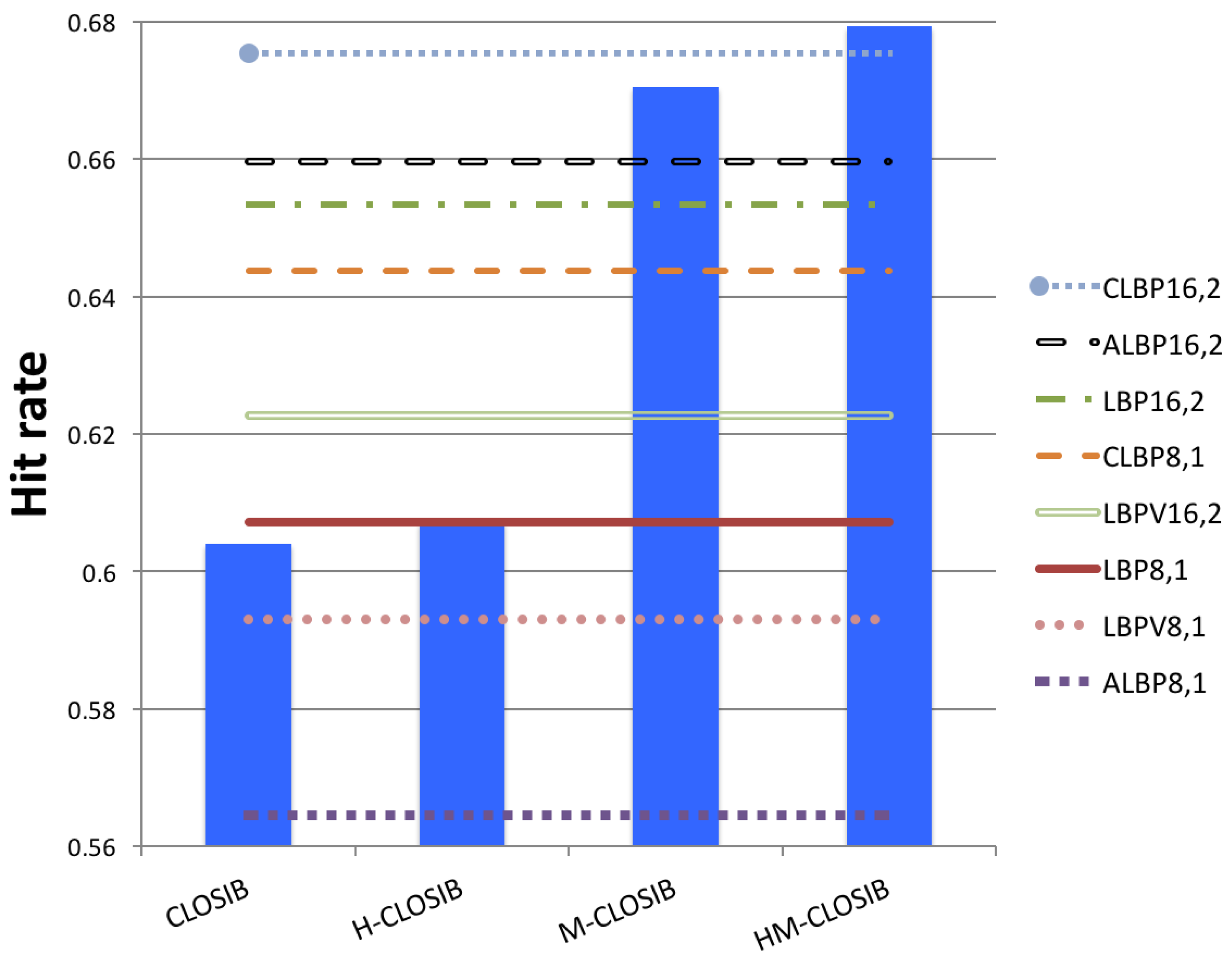
Hit rates when we describe KTH Tips2-a images with different CLOSIBs and LBP-based descriptors. For each CLOSIB variant –CLOSIB (standard), M-CLOSIB, H-CLOSIB and HM-CLOSIB–, we only represent the best result obtained among the results with different combinations of parameters.
Figure 7.
Hit rates when we describe KTH Tips2-a images with different CLOSIBs and LBP-based descriptors. For each CLOSIB variant –CLOSIB (standard), M-CLOSIB, H-CLOSIB and HM-CLOSIB–, we only represent the best result obtained among the results with different combinations of parameters.
Figure 8.
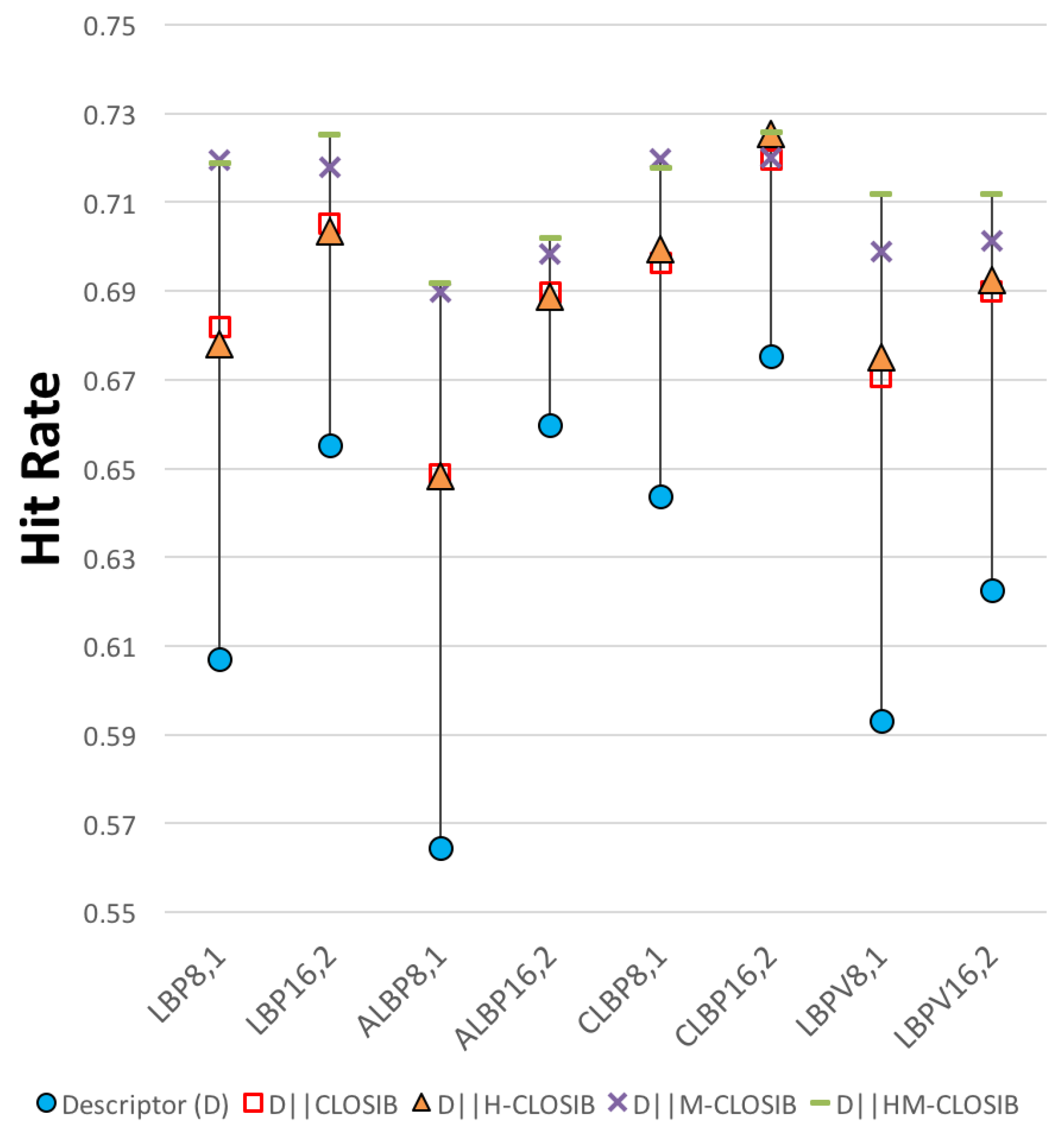
Hit rates obtained with a given LBP-based descriptor (LBP, ALBP, LBPV and CLBP) and the concatenations of the descriptor with CLOSIB variants.
Figure 8.
Hit rates obtained with a given LBP-based descriptor (LBP, ALBP, LBPV and CLBP) and the concatenations of the descriptor with CLOSIB variants.
Figure 9.
Hit rates for LBP-based descriptors LBP, ALBP, CLBP and LBPV and their multi-scale versions.
Figure 9.
Hit rates for LBP-based descriptors LBP, ALBP, CLBP and LBPV and their multi-scale versions.
Figure 10.
Hit rates obtained with the concatenation of multi-scale LBP-based descriptors and HM-CLOSIB. The horizontal line represents the hit rate of HM-CLOSIB descriptor.
Figure 10.
Hit rates obtained with the concatenation of multi-scale LBP-based descriptors and HM-CLOSIB. The horizontal line represents the hit rate of HM-CLOSIB descriptor.
Figure 11.
Results using the concatenation of LBP-based descriptors with CLOSIB variants (CLOSIB, H-CLOSIB, M-CLOSIB and HM-CLOSIB) on UIUC (left) and USPTex (right) dataset.
Figure 11.
Results using the concatenation of LBP-based descriptors with CLOSIB variants (CLOSIB, H-CLOSIB, M-CLOSIB and HM-CLOSIB) on UIUC (left) and USPTex (right) dataset.
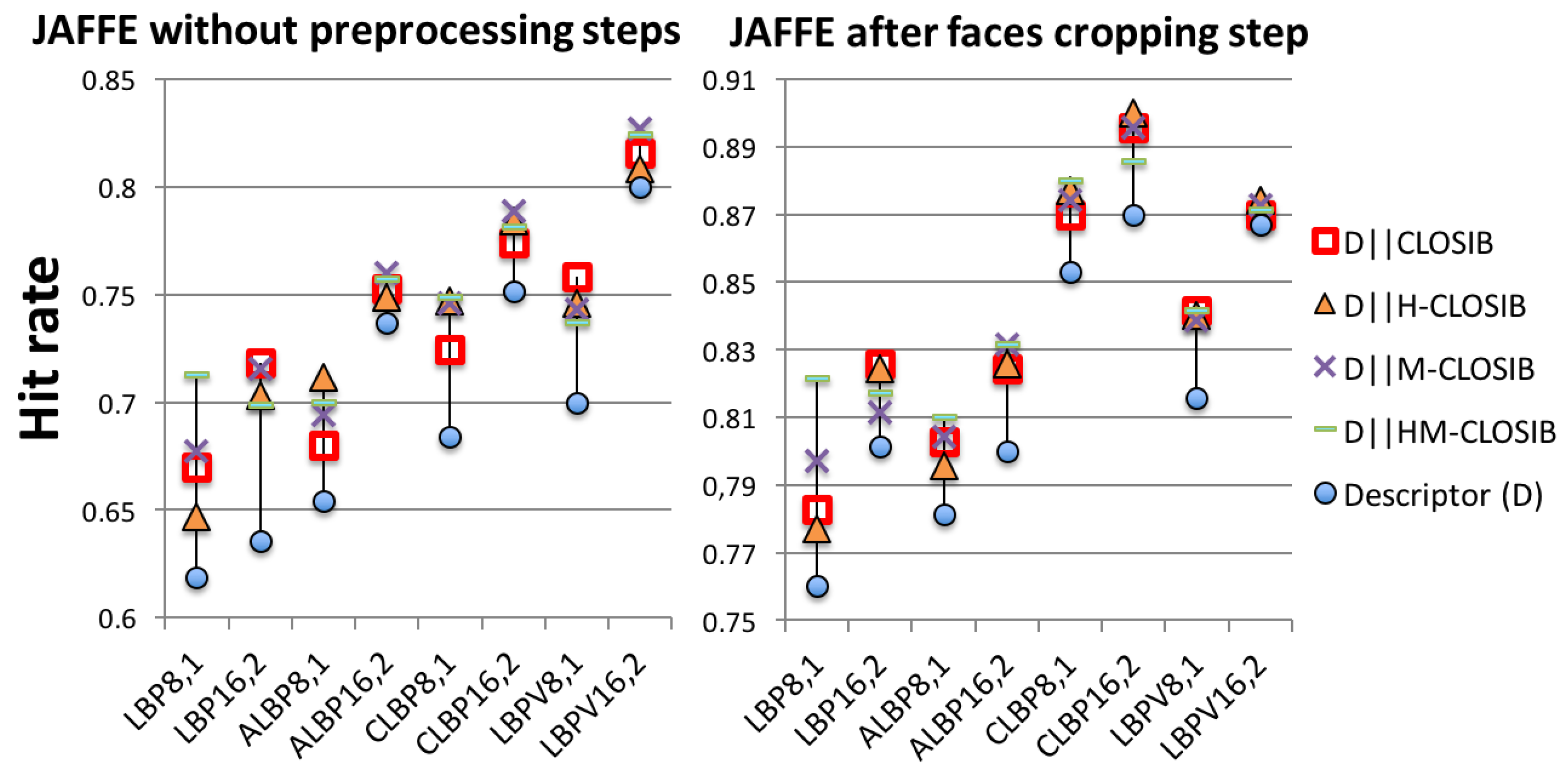
Figure 12.
Results using the concatenation of LBP-based descriptors with CLOSIB variants (CLOSIB, H-CLOSIB, M-CLOSIB and HM-CLOSIB) on the original images (left) and the cropped ones (right) of JAFFE dataset.
Figure 12.
Results using the concatenation of LBP-based descriptors with CLOSIB variants (CLOSIB, H-CLOSIB, M-CLOSIB and HM-CLOSIB) on the original images (left) and the cropped ones (right) of JAFFE dataset.
Table 1.
Local Binary Patterns (LBP) variants notation.
Table 1.
Local Binary Patterns (LBP) variants notation.
| Parameter | Meaning |
|---|
| Gray value of the central pixel |
| Gray value of neighbor p |
| P | Number of neighbors |
| R | Radius of the neighborhood |
| Weight element used to minimize the directional difference |
| w | Weight, it is a constant between 0 to the maximum gray level value difference |
| N | Number of rows in the image |
| M | Number of columns in the image |
| k | A bin of a histogram |
| K | Maximum value of LBP |
| u | Mean over the neighbors |
| c | Threshold, mean value of the differences between the central pixel and neighbors |
Table 2.
CLOSIB variants notation.
Table 2.
CLOSIB variants notation.
| Parameter | Meaning |
|---|
| I | Image |
| c | Central pixel |
| p | Neighbor pixel |
| Gray value of pixel c |
| Gray value of neighbor pixel p |
| R | Radius of the neighborhood |
| Absolute difference image at bearing p |
| moment of image |
| ‖ | Concatenation function |
| Order of the statistical moment considered |
| Variable that allows choosing between CLOSIB and H-CLOSIB |
Table 3.
Each row describes the parameters used to compute different CLOSIBs and H-CLOSIBs in the experiments. In column “order”, values 1 and 2 indicate that we obtained CLOSIB as a concatenation of the CLOSIBs for each statistical moment, .
Table 3.
Each row describes the parameters used to compute different CLOSIBs and H-CLOSIBs in the experiments. In column “order”, values 1 and 2 indicate that we obtained CLOSIB as a concatenation of the CLOSIBs for each statistical moment, .
| Radius (R) | Neighbors (Orientations) (P) | Order () |
|---|
| 1 | 8 | 1 |
| 1 | 8 | 2 |
| 2 | 16 | 1 |
| 2 | 16 | 2 |
| 1 | 8 | 1,2 |
| 2 | 16 | 1,2 |
Table 4.
Each row describes the parameters used to compute different M-CLOSIBs and HM-CLOSIBs in the experiments. Several values for a parameter indicate that we obtained CLOSIB as a concatenation of the CLOSIBs for each single value.
Table 4.
Each row describes the parameters used to compute different M-CLOSIBs and HM-CLOSIBs in the experiments. Several values for a parameter indicate that we obtained CLOSIB as a concatenation of the CLOSIBs for each single value.
| Radius (R) | Neighbors (Orientations) (P) | Order () |
|---|
| 1,2,3 | 8 | 1 |
| 1,2,3,4,5 | 8 | 1 |
| 1,2,3 | 8 | 2 |
| 1,2,3,4,5 | 8 | 2 |
| 2,3,4 | 16 | 1 |
| 2,3,4,5,6 | 16 | 1 |
| 2,3,4 | 16 | 2 |
| 2,3,4,5,6 | 16 | 2 |
| 1,2,3 | 8 | 1,2 |
| 1,2,3,4,5 | 8 | 1,2 |
| 2,3,4 | 16 | 1,2 |
| 2,3,4,5,6 | 16 | 1,2 |
Table 5.
Hit rates (in %) obtained with a given LBP-based descriptor (LBP, ALBP, LBPV and CLBP) and the concatenations of the descriptor with CLOSIB variants. The best results for each LBP-based descriptor are highlighted in bold. The best overall results are underlined. D stands for Descriptor and C for CLOSIB.
Table 5.
Hit rates (in %) obtained with a given LBP-based descriptor (LBP, ALBP, LBPV and CLBP) and the concatenations of the descriptor with CLOSIB variants. The best results for each LBP-based descriptor are highlighted in bold. The best overall results are underlined. D stands for Descriptor and C for CLOSIB.
| Descriptor (D) | D | DC | DH-C | DM-C | DHM-C |
|---|
| LBP | 60.71 | 68.20 | 67.80 | 71.95 | 71.86 |
| LBP | 65.53 | 70.52 | 70.33 | 71.78 | 72.50 |
| ALBP | 56.46 | 64.86 | 64.84 | 68.97 | 69.15 |
| ALBP | 65.97 | 68.96 | 68.88 | 69.84 | 70.16 |
| LBPV | 59.30 | 67.05 | 67.51 | 69.89 | 71.15 |
| LBPV | 62.27 | 69.00 | 69.24 | 70.14 | 71.17 |
| CLBP | 64.37 | 69.63 | 69.95 | 71.97 | 71.76 |
| CLBP | 67.53 | 71.95 | 72.54 | 72.01 | 72.54 |
Table 6.
Hit rates obtained by the proposed booster, the combination of the booster with CLBP and the reported classification scores for 18 state-of-the-art methods on the KTH-TIPS2-a. Scores are as originally reported. Our proposal is highlighted in bold, together with the best proposal of the Deep Features.
Table 6.
Hit rates obtained by the proposed booster, the combination of the booster with CLBP and the reported classification scores for 18 state-of-the-art methods on the KTH-TIPS2-a. Scores are as originally reported. Our proposal is highlighted in bold, together with the best proposal of the Deep Features.
| Descriptor—Handcrafted | Hit Rate (%) | Reference |
|---|
| WLD | 56.4 | [16] |
| MWLD | 64.7 | [16] |
| SIFT | 52.7 | [16] |
| LTP | 60.7 | [17] |
| LQP | 64.2 | [17] |
| WLBP | 64.4 | [55] |
| LHS | 73.0 | [49] |
| CMLBP | 73.1 | [56] |
| CMR | 69.4 | [57] |
| PC | 71.5 | [57] |
| DRLTP | 62.6 | [58] |
| DRLBP | 59.0 | [58] |
| HoPS | 75.0 | [59] |
| IFV | 82.2 | [54] |
| AMBP | 70.3 | [18] |
| MS4C | 70.5 | [60] |
| CRDP(NNC) | 73.8 | [61] |
| CRDP(SVM) | 78.0 | [61] |
| HM-CLOSIB | 67.9 | Ours |
| CLBPHM-CLOSIB | 74.8 | Ours |
| Descriptor—Deep Features | Hit Rate (%) | Reference |
| DeCAF | 78.4 | [54] |
| LFV + FC-CNN | 82.6 | [52] |
| NmzNet | 82.4 | [53] |
Table 7.
Computational times, in seconds, for the extraction of LBP variants on the four datasets evaluated. LBP variants with underscored parameters neighborhood, radius.
Table 7.
Computational times, in seconds, for the extraction of LBP variants on the four datasets evaluated. LBP variants with underscored parameters neighborhood, radius.
| Dataset | LBP | LBP | ALBP | ALBP | LBPV | LBPV | CLBP | CLBP |
|---|
| UIUC | 0.09183 | 0.17636 | 0.20309 | 0,44195 | 0.15119 | 0.34011 | 0.1157 | 0.23574 |
| USPTex | 0.00351 | 0.00488 | 0.00605 | 0.01051 | 0.00428 | 0.00918 | 0.00361 | 0.00594 |
| KTH-TIPS2-a | 0.00914 | 0.01084 | 0.01297 | 0.02555 | 0.0114 | 0.02283 | 0.00754 | 0.01326 |
| JAFFE | 0.01116 | 0.01695 | 0.02179 | 0.04263 | 0.01628 | 0.03312 | 0.01013 | 0.0183 |
Table 8.
Computational times, in seconds, for the extraction of CLOSIB variants on the four datasets evaluated. CLOSIB (C) and H-CLOSIB (H-C) with underscored parameters (radius, neighbors, order). M-CLOSIB (M-C) and HM-CLOSIB (HM-C) with underscored parameters (minRadius, maxRadius, neighbors, order).
Table 8.
Computational times, in seconds, for the extraction of CLOSIB variants on the four datasets evaluated. CLOSIB (C) and H-CLOSIB (H-C) with underscored parameters (radius, neighbors, order). M-CLOSIB (M-C) and HM-CLOSIB (HM-C) with underscored parameters (minRadius, maxRadius, neighbors, order).
| Dataset | C | C | H-C | H-C | M-C | M-C | HM-C | HM-C |
|---|
| UIUC | 0.08655 | 0.18975 | 0.08630 | 0.18975 | 0.25392 | 0.59675 | 0.25142 | 0.56396 |
| USPTex | 0.00393 | 0.00594 | 0.00377 | 0.00564 | 0.00938 | 0.01584 | 0.00912 | 0.01471 |
| KTH TIPS2-a | 0.00921 | 0.01782 | 0.00838 | 0.01682 | 0.02284 | 0.05158 | 0.02266 | 0.04846 |
| JAFFE | 0.02640 | 0.02790 | 0.01442 | 0.02594 | 0.03833 | 0.07177 | 0.03582 | 0.06767 |

 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}