An Energy Efficient Synchronization Protocol for Target Tracking in Wireless Sensor Array Networks


Abstract
:1. Introduction
- We propose that time synchronization can (or should) be optimized for the specific application that executes on the wireless sensor network. This idea can be extended to other protocols and systems.
- We thoroughly analyze the synchronization accuracy requirements for a target-tracking system in wireless sensor array networks and study the effects of synchronization accuracy on the QoS of the system.
- We propose an energy-efficient synchronization protocol that satisfies the different synchronization accuracy requirements with the minimum energy consumption.
- We conduct simulations to evaluate the effectiveness of our synchronization protocol.
2. Related Work
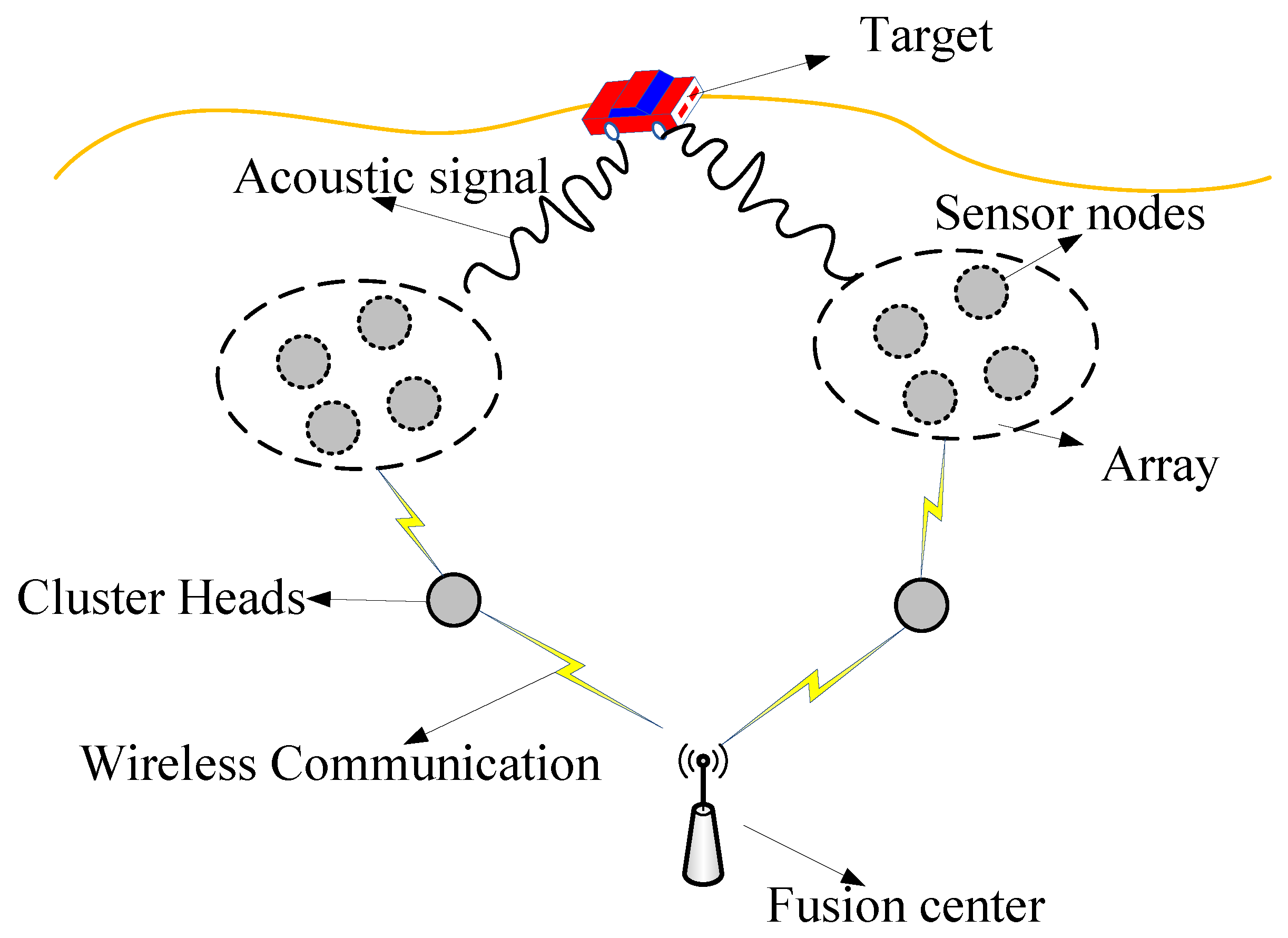
3. System Introduction and Problem Formulation
- Intra-array nodes: nodes in the same array.
- Inter-array nodes: nodes of different arrays.
- Intra-array fusion: processing the detection data and getting the acoustic arrival time to each sensor node of an array, we can figure out the direction of the target to the array by comparing the arrival time.
- Inter-array fusion: using direction information from several arrays, we can calculate the target’s location.
- Intra-array synchronization: synchronize the nodes in the same array.
- Inter-array synchronization: synchronize the nodes of different arrays.
4. Accuracy Requirements Analysis for the Target-Tracking System
4.1. Demand of Sleep Mode
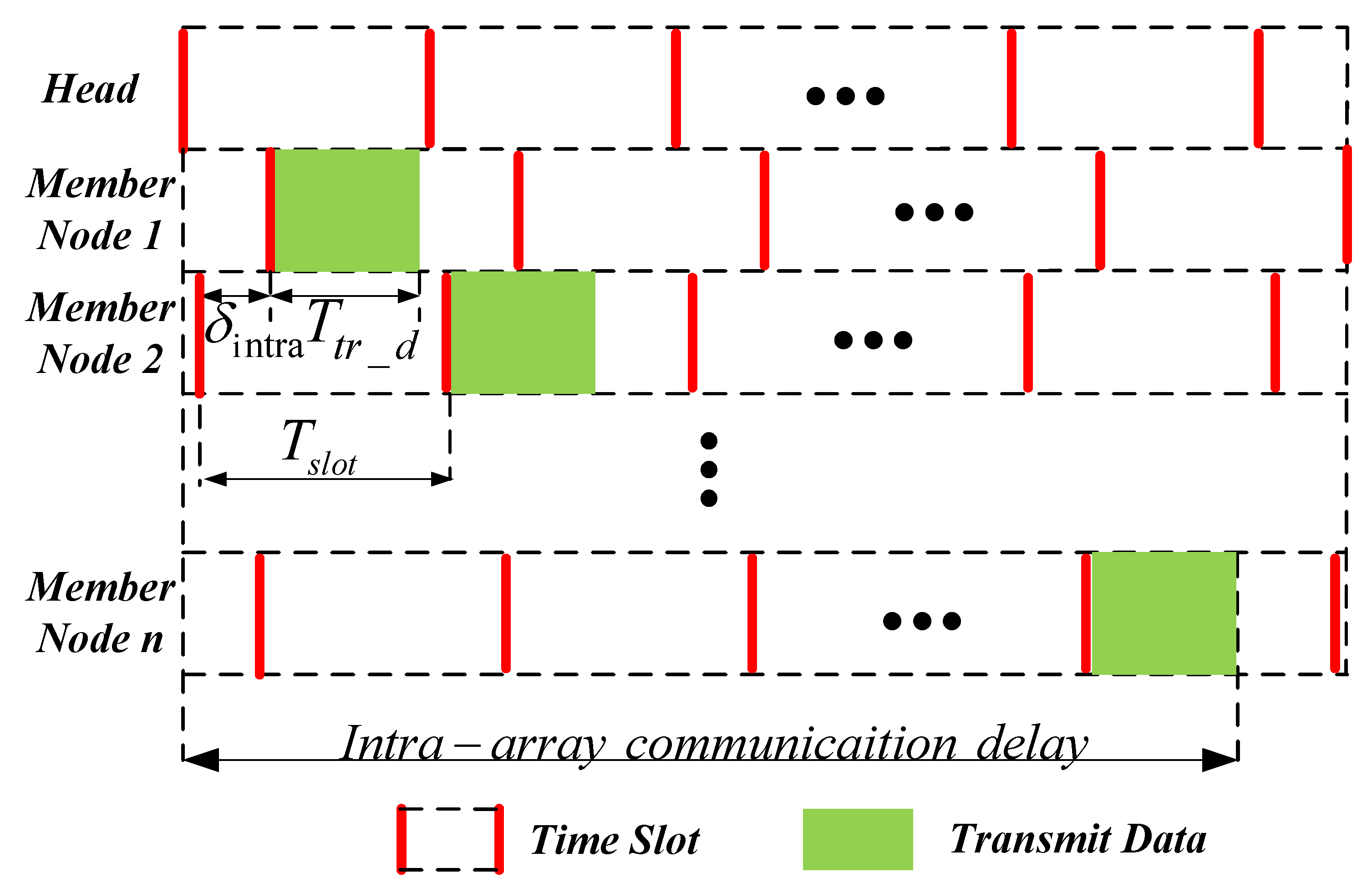
4.2. Demand of the Communication Protocol
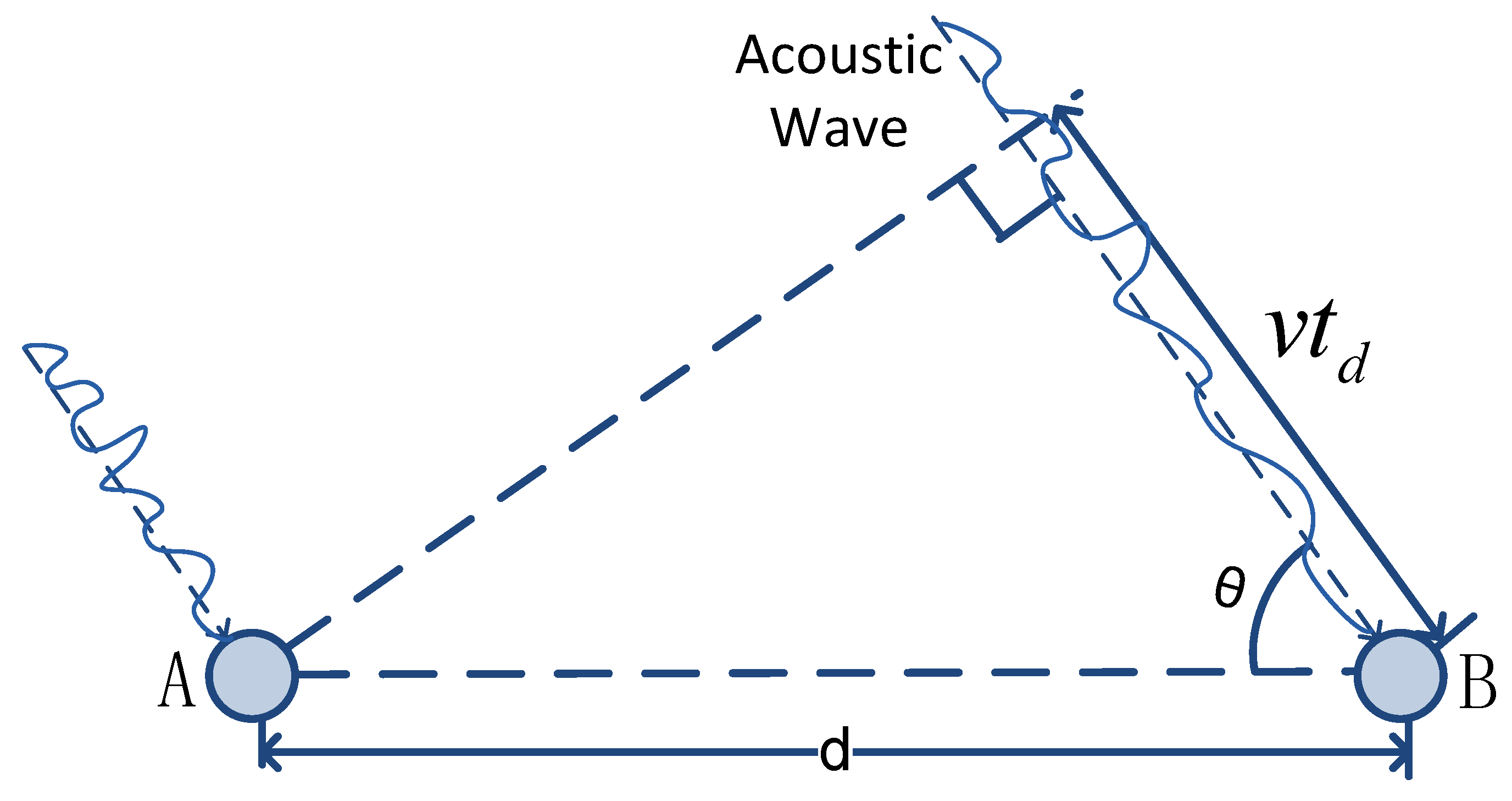
4.3. Demand of Data Fusion
5. Protocol Design
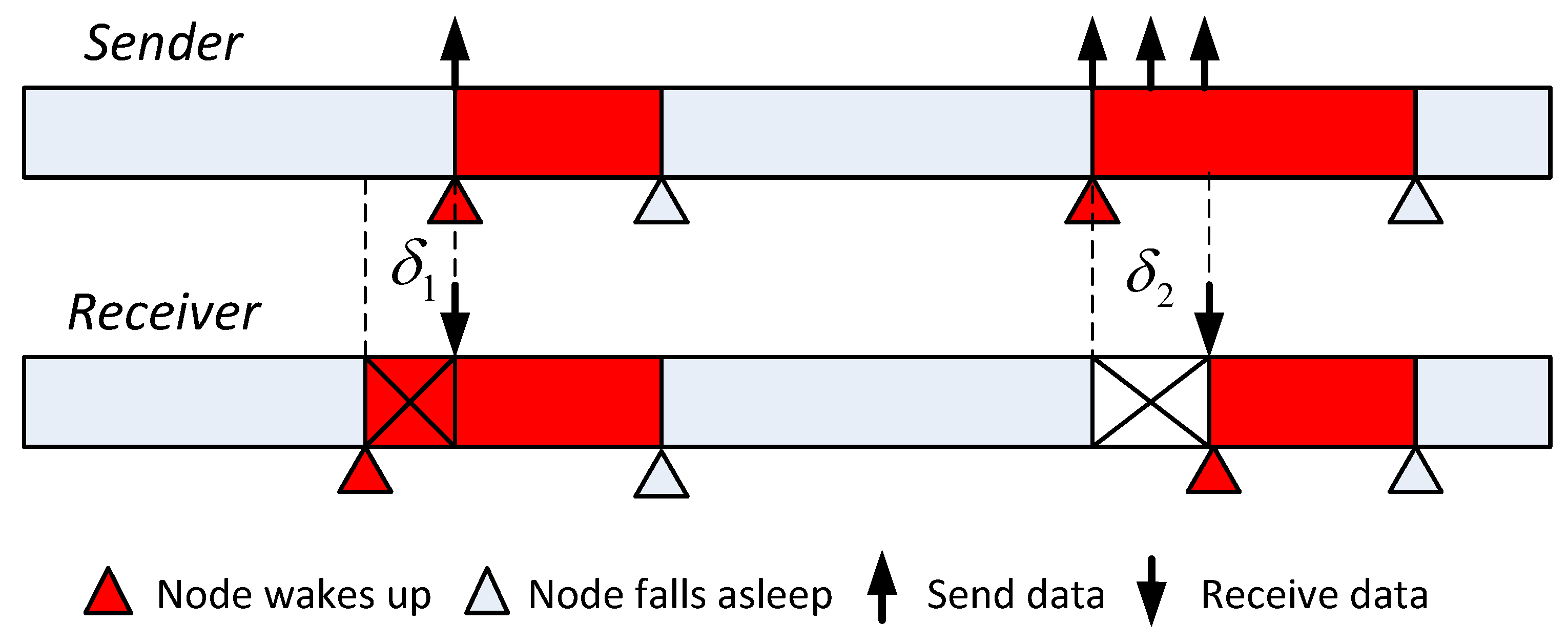
5.1. Synchronization in the Sleep Mode
5.2. Synchronization in the Detection Mode
5.3. Synchronization in the Transient State
| Algorithm 1 Drift compensation in the Sensor Array Synchronization Protocol (SASP). |
|
6. Protocol Evaluation
6.1. Clock Model
6.2. Evaluation of SASP
- Average synchronization accuracy: The synchronization accuracy averaged over all the runs for every pair of selected nodes (e.g., inter-array nodes, intra-array nodes).
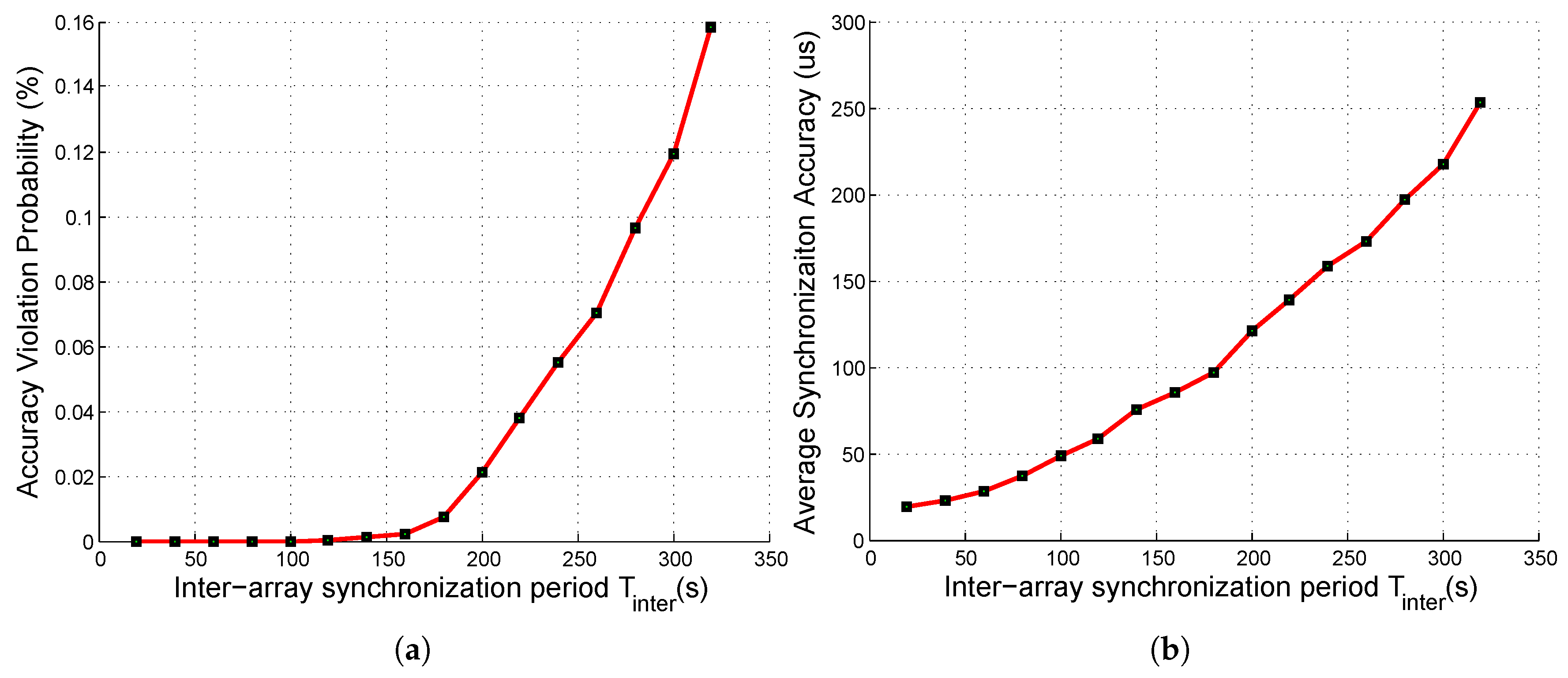
6.2.1. SASP in the Sleep Mode
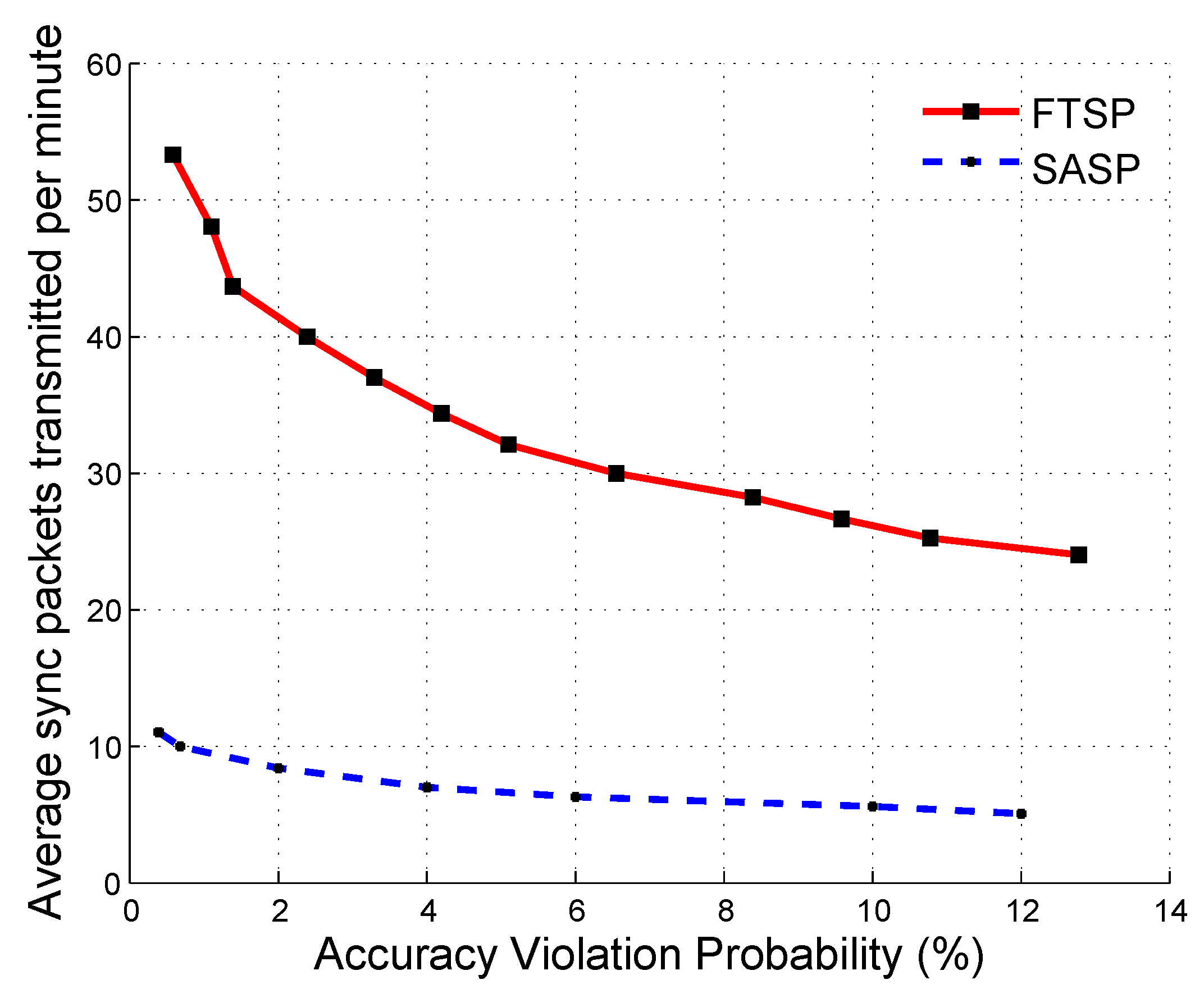
6.2.2. SASP in the Detection Mode
7. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Stankovic, J.A. Wireless sensor networks. Computer 2008, 41, 92–95. [Google Scholar] [CrossRef]
- Watt, A.J.; Phillips, M.R.; Campbell, C.E.A.; Wells, I.; Hole, S. Wireless Sensor Networks for monitoring underwater sediment transport. Sci. Total Environ. 2019. [Google Scholar] [CrossRef] [PubMed]
- Lombardo, L.; Corbellini, S.; Parvis, M.; Elsayed, A.; Angelini, E.; Grassini, S. Wireless sensor network for distributed environmental monitoring. IEEE Trans. Instrum. Meas. 2018, 67, 1214–1222. [Google Scholar] [CrossRef]
- Luo, J.A.; Zhang, X.P.; Wang, Z.; Lai, X.P. On the Accuracy of Passive Source Localization Using Acoustic Sensor Array Networks. IEEE Sens. J. 2017, 17, 1795–1809. [Google Scholar] [CrossRef]
- Luo, J.A.; Pan, S.W.; Peng, D.L.; Wang, Z.; Li, Y.J. Source Localization in Acoustic Sensor Networks via Constrained Least-Squares Optimization Using AOA and GROA Measurements. Sensors 2018, 18, 937. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.B.; Hu, J.H.; Lv, R.Z.; Wei, J.; Wang, Q.; Yang, D.J.; Qi, H.R. Personalized privacy-preserving task allocation for mobile crowdsensing. IEEE Trans. Mob. Comput. 2018. [Google Scholar] [CrossRef]
- Wang, Z.B.; Pang, X.Y.; Chen, Y.H.; Shao, H.J.; Wang, Q.; Wu, L.B.; Chen, H.L.; Qi, H.R. Privacy-preserving crowd-sourced statistical data publishing with an untrusted server. IEEE Trans. Mob. Comput. 2018. [Google Scholar] [CrossRef]
- He, T.; Krishnamurthy, S.; Luo, L.; Yan, T.; Gu, L.; Stoleru, R.; Zhou, G.; Cao, Q.; Vicaire, P.; Stankovic, J.A.; et al. VigilNet: An integrated sensor network system for energy-efficient surveillance. ACM Trans. Sens. Netw. 2006, 2, 1–38. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Z.; Zhuo, S.; Shen, J.; Cai, S.; Bao, M.; Feng, D. The design and implement of acoustic array sensor network platform for online multi-target tracking. In Proceedings of the IEEE International Conference on Distributed Computing in Sensor Systems, Hangzhou, China, 16–18 May 2012; pp. 323–328. [Google Scholar]
- Kumar, P.; Kumari, S.; Sharma, V.; Sangaiah, A.K.; Wei, J.; Li, X. A certificateless aggregate signature scheme for healthcare wireless sensor network. Sustain. Comput. Inform. Syst. 2018, 18, 80–89. [Google Scholar] [CrossRef]
- Saleh, N.; Kassem, A.; Haidar, A.M. Energy-efficient architecture for wireless sensor networks in healthcare applications. IEEE Access 2018, 6, 6478–6486. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Dinis, R. Distributed RSS-based localization in wireless sensor networks based on second-order cone programming. Sensors 2014, 14, 18410–18432. [Google Scholar] [CrossRef]
- Tian, Y. Time Synchronization in WSNs with Random Bounded Communication Delays. IEEE Trans. Autom. Control 2017, 62, 5445–5450. [Google Scholar] [CrossRef]
- Yildirim, K.S.; Carli, R.; Schenato, L. Adaptive Proportional CIntegral Clock Synchronization in Wireless Sensor Networks. IEEE Trans. Control Syst. Technol. 2018, 26, 610–623. [Google Scholar] [CrossRef]
- Al Shaikhi, A.; Masoud, A. Efficient, Single Hop Time Synchronization Protocol for Randomly Connected WSNs. IEEE Wirel. Commun. Lett. 2017, 6, 170–173. [Google Scholar] [CrossRef] [Green Version]
- Tessaro, L.; Raffaldi, C.; Rossi, M.; Brunelli, D. Lightweight synchronization algorithm with self-calibration for Industrial LoRa Sensor Networks. In Proceedings of the IEEE Workshop on Metrology for Industry 4.0 and IoT, Brescia, Italy, 16–18 April 2018; pp. 259–263. [Google Scholar]
- Tosato, P.; Macii, D.; Fontanelli, D.; Brunelli, D.; Laverty, D. A Software-based Low-Jitter Servo Clock for Inexpensive Phasor Measurement Units. In Proceedings of the IEEE International Symposium on Precision Clock Synchronization for Measurement, Control, and Communication (ISPCS), Geneva, Switzerland, 30 September–5 October 2018; pp. 1–6. [Google Scholar]
- Tessaro, L.; Raffaldi, C.; Rossi, M.; Brunelli, D. LoRa Performance in Short Range Industrial Applications. In Proceedings of the IEEE International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Amalfi, Italy, 20–22 June 2018; pp. 1089–1094. [Google Scholar]
- Simon, G.; Maróti, M.; Ledeczi, A.; Balogh, G.; Kusy, B.; Nadas, A.; Pap, G.; Sallai, J.; Frampton, K. Sensor network-based countersniper system. In Proceedings of the ACM International conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004; pp. 1–12. [Google Scholar]
- Pajic, M.; Mangharam, R. Anti-jamming for embedded wireless networks. In Proceedings of the IEEE/ACM International Conference on Information Processing in Sensor Networks, San Francisco, CA, USA, 13–16 April 2009; pp. 301–312. [Google Scholar]
- Kaplan, L.M. Global node selection for localization in a distributed sensor network. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 113–135. [Google Scholar] [CrossRef]
- Ganeriwal, S.; Kumar, R.; Srivastava, M.B. Timing-sync protocol for sensor networks. In Proceedings of the ACM International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003; pp. 138–149. [Google Scholar]
- Elson, J.; Girod, L.; Estrin, D. Fine-grained network time synchronization using reference broadcasts. ACM SIGOPS Oper. Syst. Rev. 2002, 36, 147–163. [Google Scholar] [CrossRef]
- Maróti, M.; Kusy, B.; Simon, G.; Lédeczi, A. The flooding time synchronization protocol. In Proceedings of the ACM International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004; pp. 39–49. [Google Scholar]
- Zhong, Z.; Chen, P.; He, T. On-demand time synchronization with predictable accuracy. In Proceedings of the IEEE International Conference on Computer Communications, Maui, HI, USA, 31 July–4 August 2011; pp. 2480–2488. [Google Scholar]
- Xie, K.; Cai, Q.; Fu, M. A fast clock synchronization algorithm for wireless sensor networks. Automatica 2018, 92, 133–142. [Google Scholar] [CrossRef]
- Brunelli, D.; Balsamo, D.; Paci, G.; Benini, L. Temperature compensated time synchronisation in wireless sensor networks. Electron. Lett. 2012, 48, 1026–1028. [Google Scholar] [CrossRef]
- Luo, J.; Feng, D.; Chen, S.; Zhang, P.; Bao, M.; Wang, Z. Experiments for on-line bearing-only target localization in acoustic array sensor networks. In Proceedings of the IEEE World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 1425–1428. [Google Scholar]
- Chen, J.; Kung, Y.; Tung, T.; Reed, C.W.; Chen, D. Source localization and tracking of a wideband source using a randomly distributed beam-forming sensor array. Int. J. High Perform. Comput. Appl. 2002, 16, 259–272. [Google Scholar] [CrossRef]
- Chen, J.C.; Yip, L.; Elson, J.; Wang, H.; Maniezzo, D.; Hudson, R.E.; Yao, K.; Estrin, D. Coherent acoustic array processing and localization on wireless sensor networks. Proc. IEEE 2003, 91, 1154–1162. [Google Scholar] [CrossRef] [Green Version]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Hill, J.; Szewczyk, R.; Woo, A.; Hollar, S.; Culler, D.; Pister, K. System architecture directions for networked sensors. ACM SIGPLAN Not. 2000, 34, 93–104. [Google Scholar] [CrossRef]
- Gong, F.; Sichitiu, M.L. CESP: A Low-Power High-Accuracy Time Synchronization Protocol. IEEE Trans. Veh. Technol. 2016, 65, 2387–2396. [Google Scholar] [CrossRef]
- Hamilton, B.R.; Ma, X.; Zhao, Q.; Xu, J. ACES: Adaptive clock estimation and synchronization using Kalman filtering. In Proceedings of the ACM International Conference on Mobile Computing and Networking, San Francisco, CA, USA, 14–19 September 2008; pp. 152–162. [Google Scholar]
- A True System-on-Chip Solution for 2.4 GHz IEEE 802.15.4/ZigBee™ Datasheet (Rev. F). Available online: http://www.ti.com/lit/ds/symlink/cc2430.pdf (accessed on 12 March 2019).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameters | |
|---|---|
| Node’s energy consumption awake (mA) | 25 |
| Node’s energy consumption asleep (µA) | 0.9 |
| Energy supplied for the sleep mode E (mAh) | 100 |
| Operation period in the sleep mode P (s) | 120 |
| Length of a network maintenance packet (bytes) | 40 |
| Length of piggybacked synchronization bytes (bytes) | 2 |
| Sending rate of wireless communication r (Kbps) | 250 |
| Expected lifetime of the target-tracking system (year) | 5 |
| Length of a detection data packet (bytes) | 100 |
| Number of nodes in every array n | 5 |
| Tolerable intra-array communication delay (ms) | 20 |
| Number of heads in the system m | 8 |
| Tolerable inter-array communication delay (ms) | 200 |
| Velocity of the acoustic wave in the air v (m/s) | 340 |
| Distance between nodes in the same array d (m) | 20 |
| Tolerable error of direction measurement (degree) | 1 |
| Tolerable localization error (cm) | 10 |
| Target’s velocity u (m/s) | 20 |
| Clock model parameters | |
| (µs) | 15 |
| 10−7 | |
| Clock drift (ppm) | −40–40 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, J.; Yin, M.; Luo, J.-A.; Wang, Z.-B.; Wang, Z.; Li, Z.-H. An Energy Efficient Synchronization Protocol for Target Tracking in Wireless Sensor Array Networks. Sensors 2019, 19, 1367. https://doi.org/10.3390/s19061367
Shen J, Yin M, Luo J-A, Wang Z-B, Wang Z, Li Z-H. An Energy Efficient Synchronization Protocol for Target Tracking in Wireless Sensor Array Networks. Sensors. 2019; 19(6):1367. https://doi.org/10.3390/s19061367
Chicago/Turabian StyleShen, Jie, Ming Yin, Ji-An Luo, Zhi-Bo Wang, Zhi Wang, and Zhen-Hui Li. 2019. "An Energy Efficient Synchronization Protocol for Target Tracking in Wireless Sensor Array Networks" Sensors 19, no. 6: 1367. https://doi.org/10.3390/s19061367