Application of Fresnel Zone Plate Focused Beam to Optimized Sensor Design for Pulse-Echo Harmonic Generation Measurements

Abstract
:1. Introduction
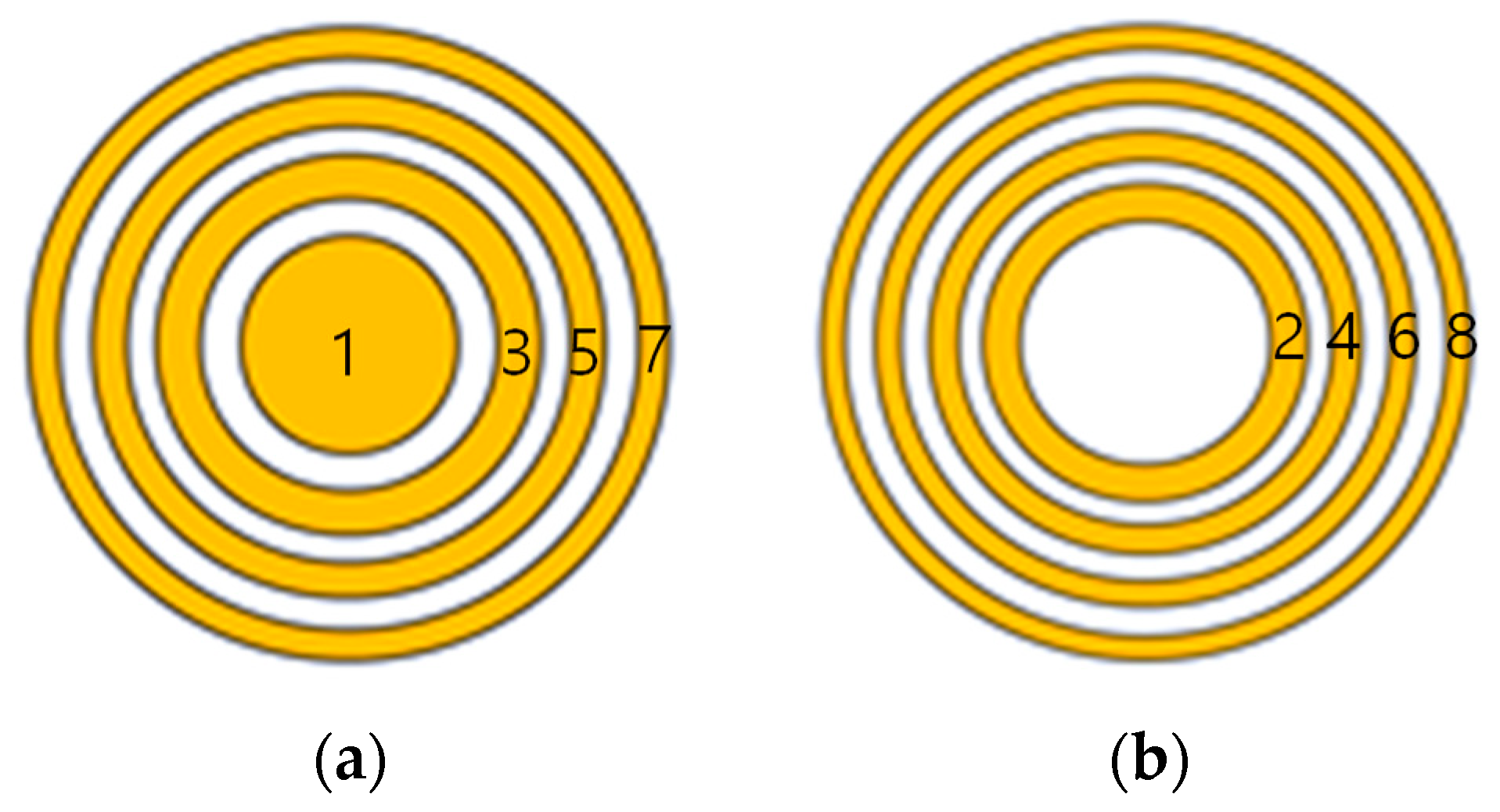
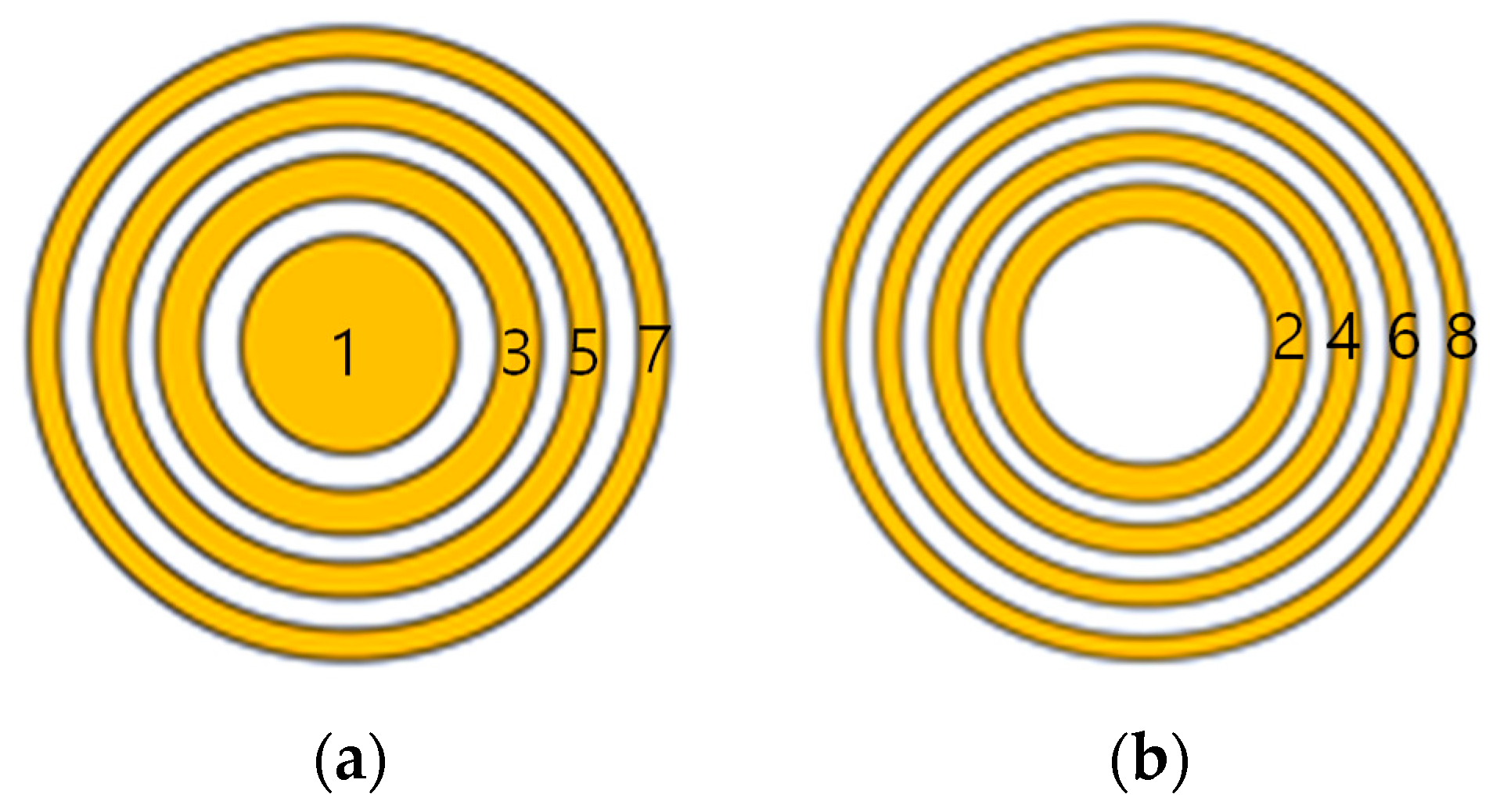
2. Design Concept of FZP Sensors
3. FZP Beam Fields and Definition of
3.1. Sound Beam Fields in the Forward Propagation Region
3.2. Sound Beam Fields after Reflection from the Boundary
3.3. Definition of Nonlinear Parameter
4. Simulation of FZP Focused Beam Fields
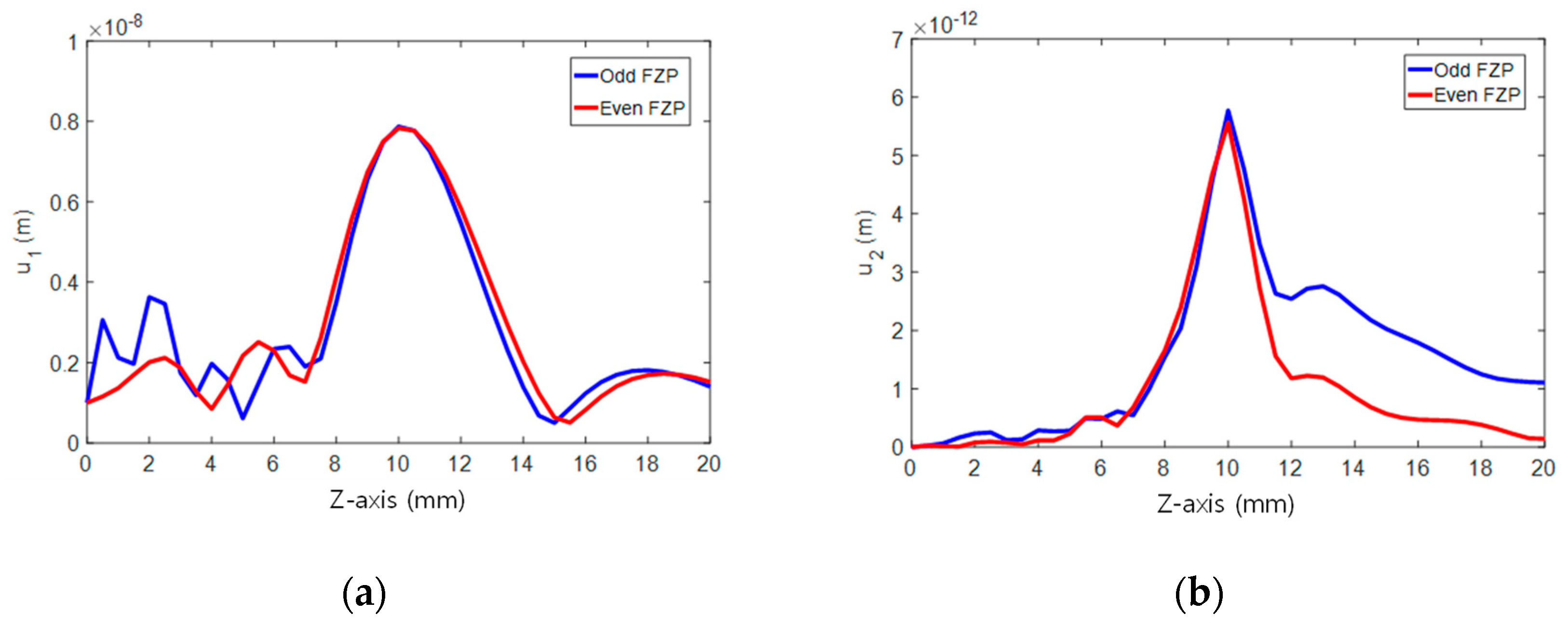
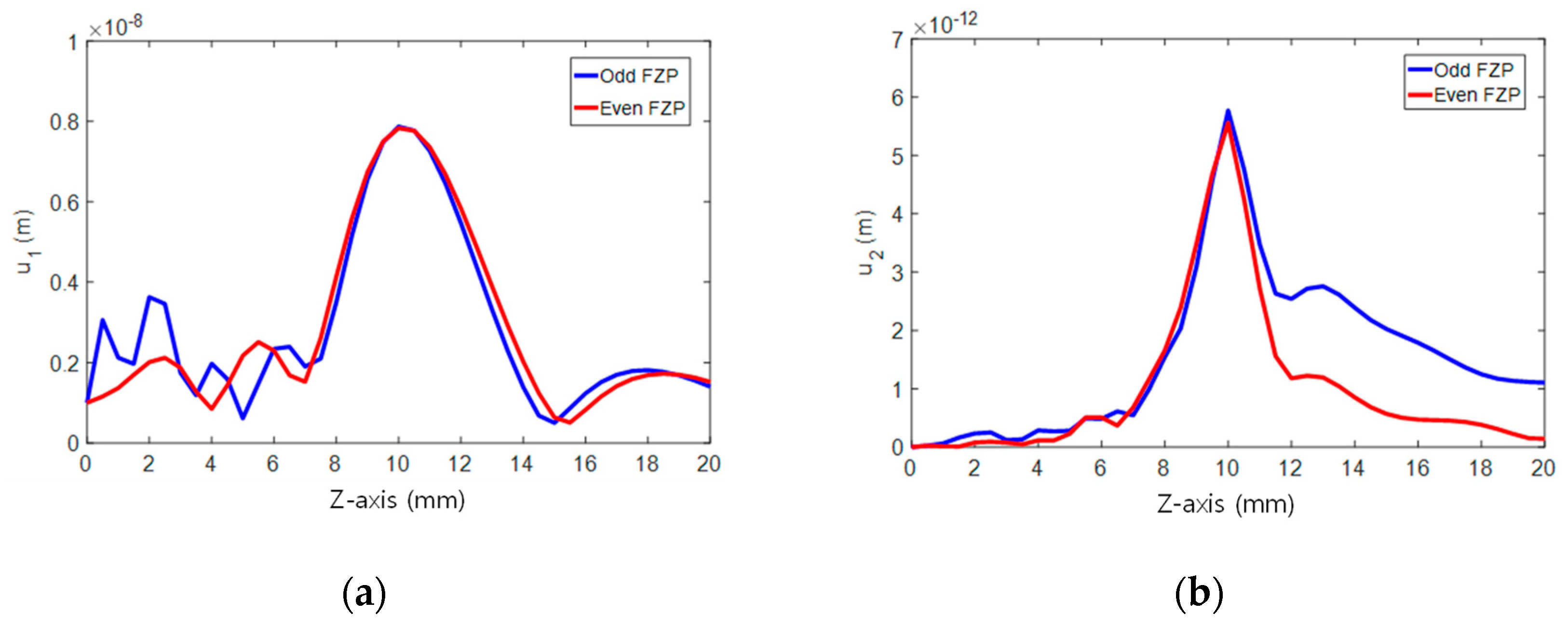
4.1. Effects of FZP Type
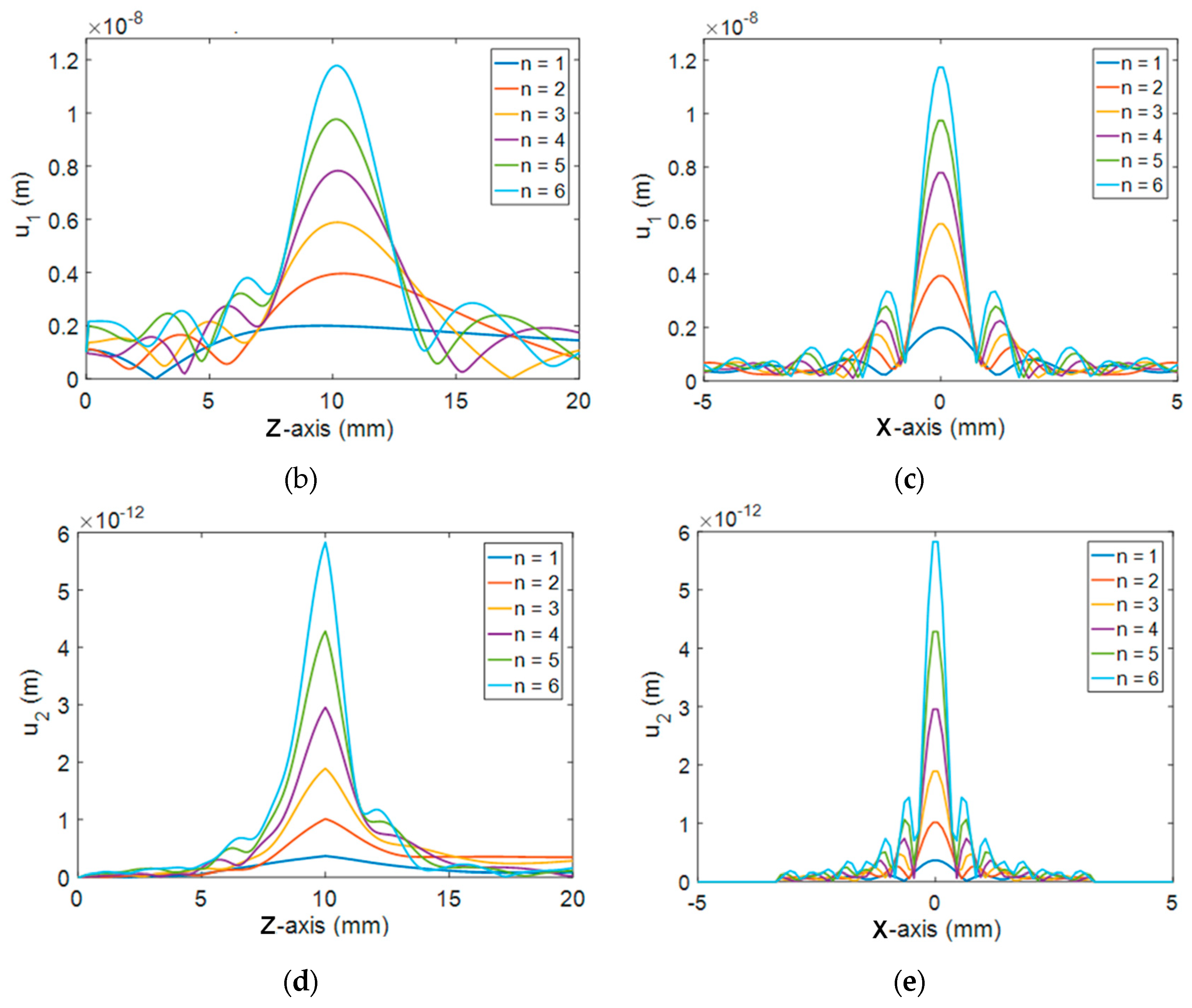
4.2. Effects of the Number of FZP Zones
5. Optimal Design of FZP Sensors
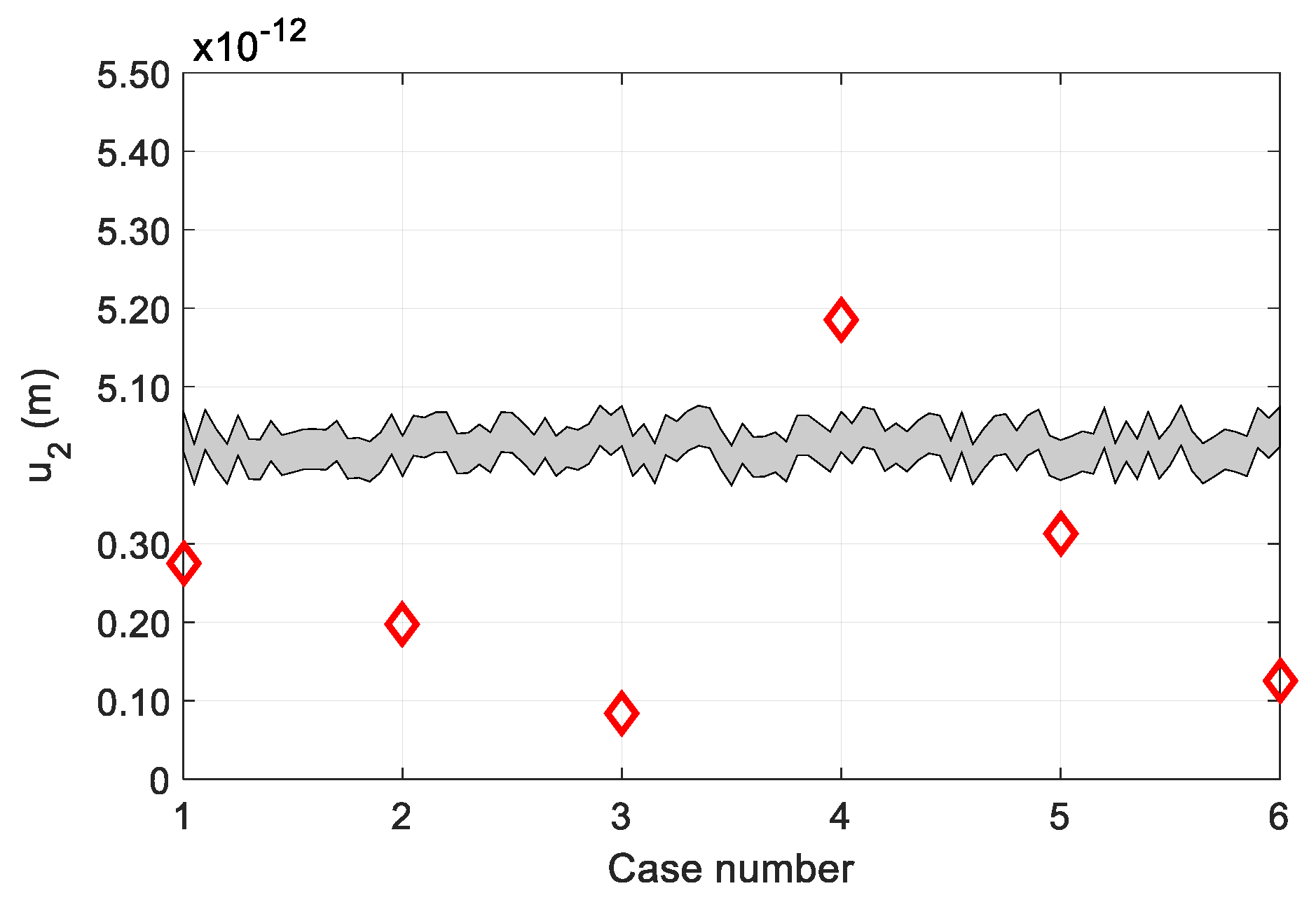
5.1. Effects of Focal Length and Receiver Size
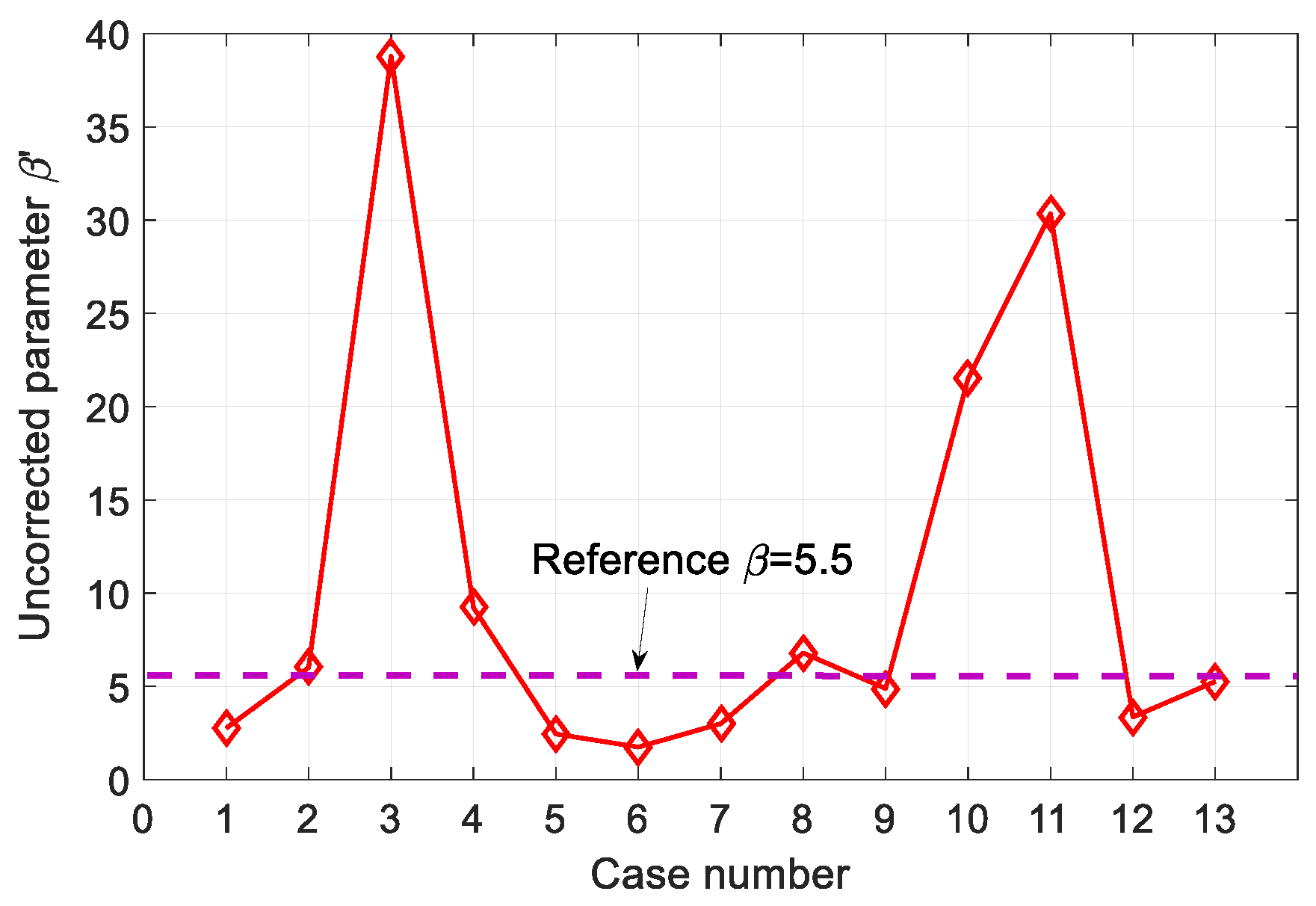
5.2. Optimal Design of FZP Sensors
5.3. Effects of Sound Velocity Change
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jeong, H.; Barnard, D.; Cho, S.; Zhang, S.; Li, X. Receiver calibration and the nonlinearity parameter measurement of thick solid samples with diffraction and attenuation corrections. Ultrasonics 2017, 81, 147–157. [Google Scholar] [CrossRef] [PubMed]
- Barnard, D.; Chakrapani, S.K. Measurement of nonlinearity parameter (β) of water using commercial immersion transducers. AIP Conf. Proc. 2016, 1706, 060004. [Google Scholar] [Green Version]
- Jeong, H.; Zhang, S.; Barnard, D.; Li, X. Significance of accurate diffraction corrections for the second harmonic wave in determining the acoustic nonlinearity parameter. AIP Adv. 2015, 5, 097179. [Google Scholar] [CrossRef] [Green Version]
- Jeong, H.; Zhang, S.; Li, X. A novel method for extracting acoustic nonlinearity parameters with diffraction corrections. J. Mech. Sci. Technol. 2016, 30, 643–652. [Google Scholar] [CrossRef]
- Best, S.R.; Croxford, A.J.; Neild, S.A. Pulse-Echo harmonic generation measurements for nondestructive evaluation. J. Nondestruct. Eval. 2014, 33, 205–215. [Google Scholar] [CrossRef]
- Van Buren, A.L.; Breazeale, M.A. Reflection of Finite-Amplitude Ultrasonic Waves. I. Phase Shift. J. Acoust. Soc. Am. 1968, 44, 1014–1020. [Google Scholar] [CrossRef]
- Saito, S. Nonlinearity generated second harmonic sound in a focused beam reflected from free surface. Acoust. Sci. Technol. 2005, 26, 55–61. [Google Scholar] [CrossRef]
- Zhang, S.; Li, X.; Jeong, H.; Cho, S.; Hu, H. Theoretical and experimental investigation of the pulse-echo nonlinearity acoustic sound fields of focused transducers. Appl. Acoust. 2017, 117, 145–149. [Google Scholar] [CrossRef]
- Schmerr, L.W., Jr. Fundamentals of Ultrasonic Phased Arrays; Springer: New York, NY, USA, 2015. [Google Scholar]
- Cao, Q.; Jahns, J. Comprehensive focusing analysis of various Fresnel zone plates. J. Opt. Soc. Am. A 2004, 21, 561–571. [Google Scholar] [CrossRef]
- Lider, V.V. Zone Plates for X-Ray Focusing (Review). J. Surf. Investig. X-ray Synchrotron Neutron Tech. 2017, 11, 1113–1127. [Google Scholar]
- Schindel, D.W.; Bashford, A.G.; Hutchins, D.A. Focusing of ultrasonic waves in air using a micromachined Fresnel zone plate. Ultrasonics 1997, 35, 275–285. [Google Scholar] [CrossRef]
- Molerón, M.; Serra-Garcia, M.; Daraio, C. Acoustic Fresnel lenses with extraordinary transmission. Appl. Phys. Lett. 2014, 105, 114109. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Xing, D.; Xiang, L. Photoacoustic imaging using an ultrasonic Fresnel zone plate transducer. J. Phys. D Appl. Phys. 2008, 41, 095111. [Google Scholar] [CrossRef]
- Hon, S.F.; Kwok, K.W.; Li, H.L.; Ng, H.Y. Self-focused ejectors for viscous liquids. Rev. Sci. Instrum. 2010, 81, 065102. [Google Scholar] [CrossRef] [PubMed]
- Alvares-Arenas, T.E.G.; Camacho, J.; Fritsch, C. Passive focusing techniques for piezoelectric air-coupled ultrasonic transducers. Ultrasonics 2016, 67, 85–93. [Google Scholar] [CrossRef] [PubMed]
- Fuster, J.M.; Candelas, P.; Castiñeira-Ibáñez, S.; Pérez-López, S.; Rubio, C. Analysis of Fresnel Zone Plates focusing dependence on operating frequency. Sensors 2017, 17, 2809. [Google Scholar] [CrossRef] [PubMed]
- Jeong, H.; Cho, S.; Zhang, S.; Li, X. Acoustic nonlinearity parameter measurements in a pulse-echo setup with the stress-free reflection boundary. J. Acoust. Soc. Am. 2018, 143, EL237–EL242. [Google Scholar] [CrossRef] [PubMed]
- Jeong, H.; Zhang, S.; Barnard, D.; Li, X. A novel and Practical Approach for Determination of the Acoustic Nonlinearity Parameter using a Pulse-Echo Method. AIP Conf. Proc. 2016, 1706, 060006. [Google Scholar]
- Meulen, F.V.; Haumesser, L. Evaluation of B/A nonlinear parameter using an acoustic self-calibrated pulse-echo method. Appl. Phys. Lett. 2008, 92, 214106. [Google Scholar] [CrossRef]
- Zhang, S.; Li, X.; Jeong, H. Measurement of Rayleigh wave beams using angle beam wedge transducers as the transmitter and receiver with consideration of beam spreading. Sensors 2017, 17, 1449. [Google Scholar] [CrossRef] [PubMed]
- Hamilton, M.F.; Blackstock, D.T. Nonlinear Acoustics; Academic Press: New York, NY, USA, 1998; Volume 9. [Google Scholar]
- Schmerr, L.W., Jr. Fundamentals of Ultrasonic Nondestructive Evaluation—A Modeling Approach; Springer: New York, NY, USA, 2016. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case No. | Focal Length (mm) | Receiver Type |
|---|---|---|
| 1 | 10 | Point |
| 2 | Area (diameter of 3 mm) | |
| 3 | Area (diameter of 6 mm) | |
| 4 | 20 | Point |
| 5 | Area (diameter of 3 mm) | |
| 6 | Area (diameter of 6 mm) |
| Case No. | FZP Type | Focal Length (cm) | Receiver Diameter (inch) | Frequency (MHz) |
|---|---|---|---|---|
| 1 | Odd | 1.5 | 0.25 | 5 |
| 2 | Odd | 1.7 | 0.25 | 5 |
| 3 | Odd | 2.0 | 0.25 | 5 |
| 4 | Odd | 1.0 | 0.125 | 5 |
| 5 | Odd | 1.3 | 0.125 | 5 |
| 6 | Odd | 1.5 | 0.125 | 5 |
| 7 | Odd | 1.7 | 0.125 | 5 |
| 8 | Odd | 2.0 | 0.125 | 5 |
| 9 | Odd | 1.3 | 0.125 | 7.5 |
| 10 | Odd | 1.5 | 0.125 | 7.5 |
| 11 | Odd | 1.7 | 0.125 | 7.5 |
| 12 | Odd | 2.0 | 0.125 | 7.5 |
| 13 | Even | 2.0 | 0.125 | 5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, H.; Shin, H.; Zhang, S.; Li, X.; Cho, S. Application of Fresnel Zone Plate Focused Beam to Optimized Sensor Design for Pulse-Echo Harmonic Generation Measurements. Sensors 2019, 19, 1373. https://doi.org/10.3390/s19061373
Jeong H, Shin H, Zhang S, Li X, Cho S. Application of Fresnel Zone Plate Focused Beam to Optimized Sensor Design for Pulse-Echo Harmonic Generation Measurements. Sensors. 2019; 19(6):1373. https://doi.org/10.3390/s19061373
Chicago/Turabian StyleJeong, Hyunjo, Hyojeong Shin, Shuzeng Zhang, Xiongbing Li, and Sungjong Cho. 2019. "Application of Fresnel Zone Plate Focused Beam to Optimized Sensor Design for Pulse-Echo Harmonic Generation Measurements" Sensors 19, no. 6: 1373. https://doi.org/10.3390/s19061373