An Analysis of the Attitude Estimation Errors Caused by the Deflections of Vertical in the Integration of Rotational INS and GNSS


Abstract
:1. Introduction
2. Theoretical Analysis
2.1. The Definition of the Coordinates System and DOV
2.2. The Attitude Estimation Errors Caused by DOV in the Integration of GNSS and Rotational INS
3. Simulation
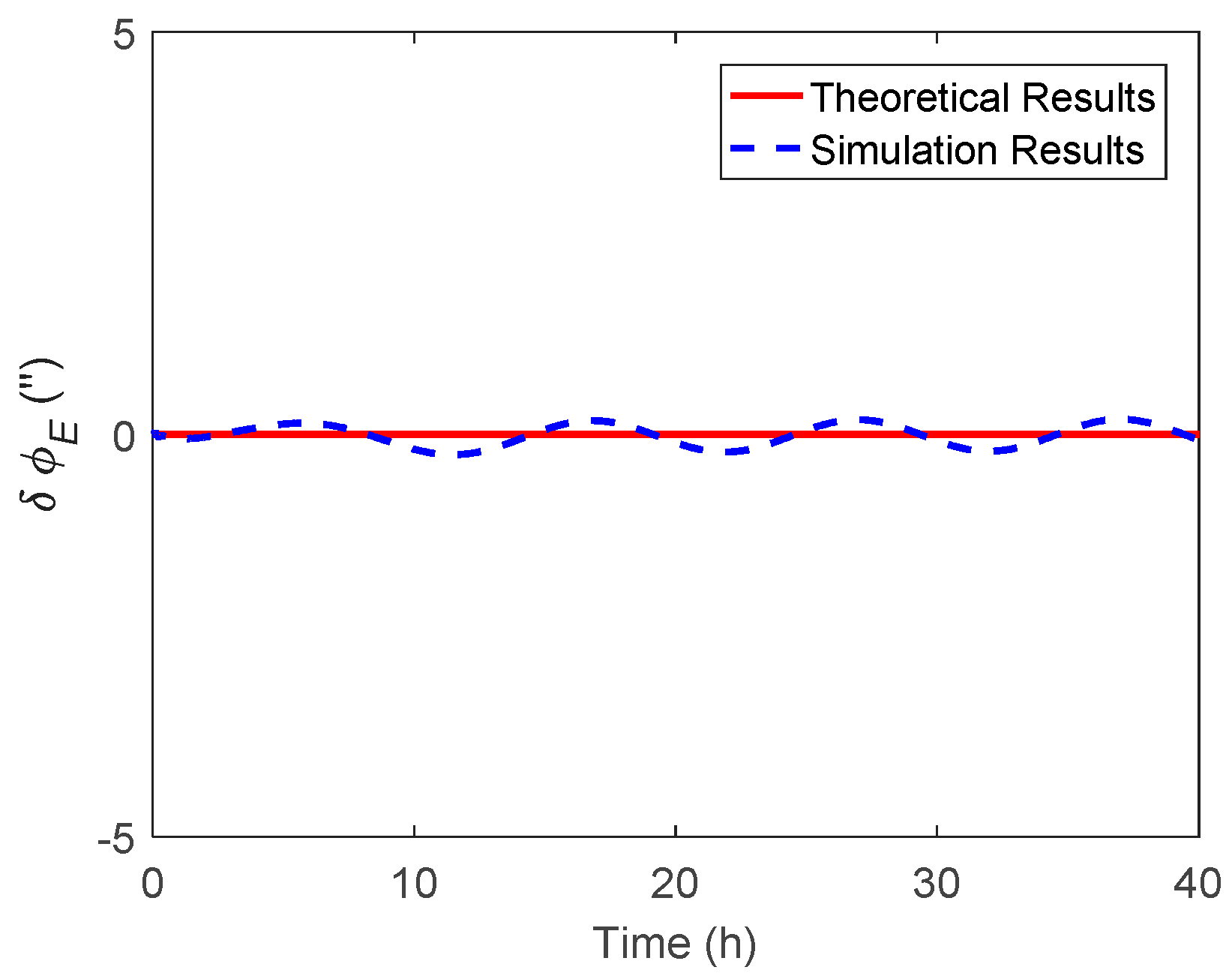
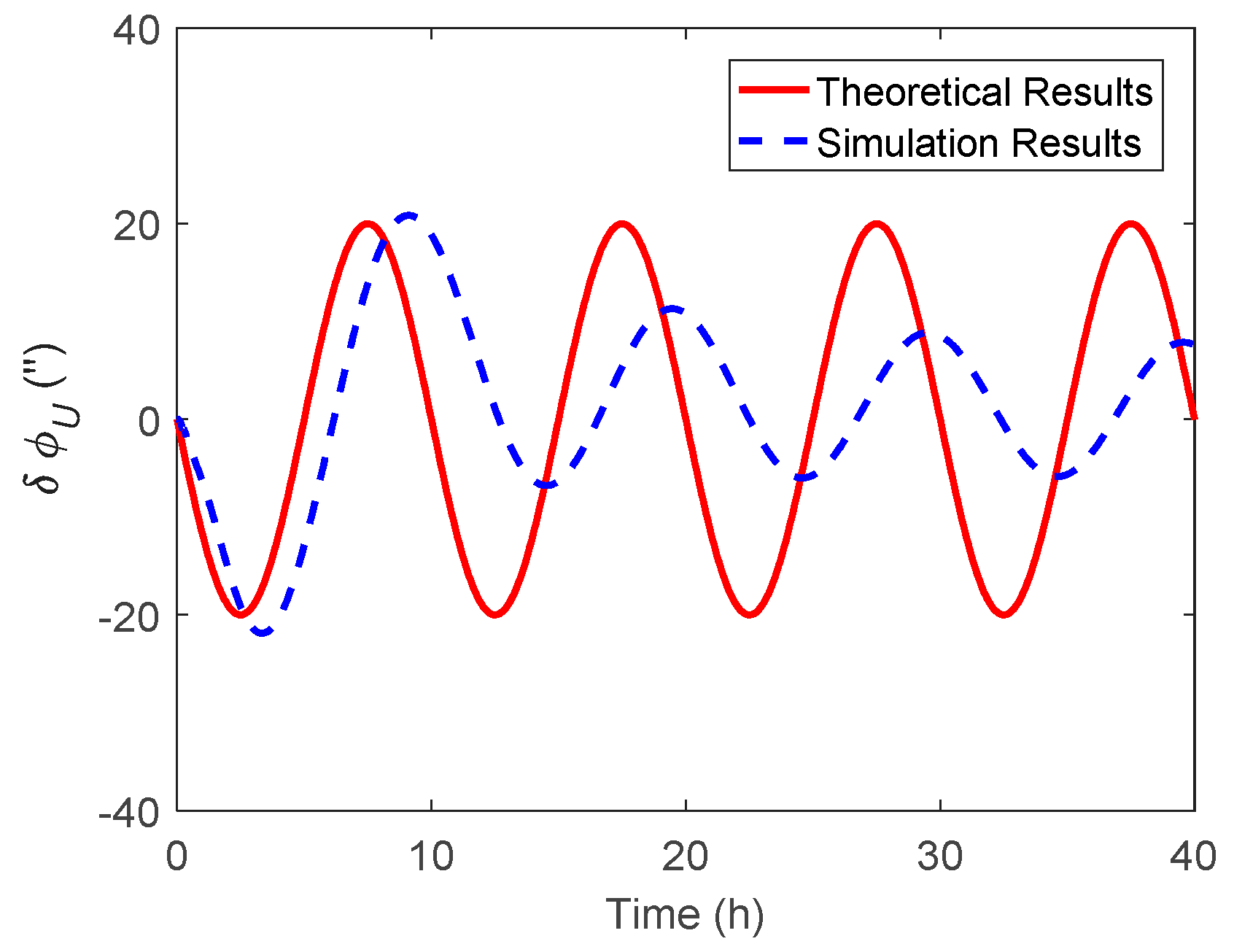
3.1. The Attitude Estimation Errors Caused by
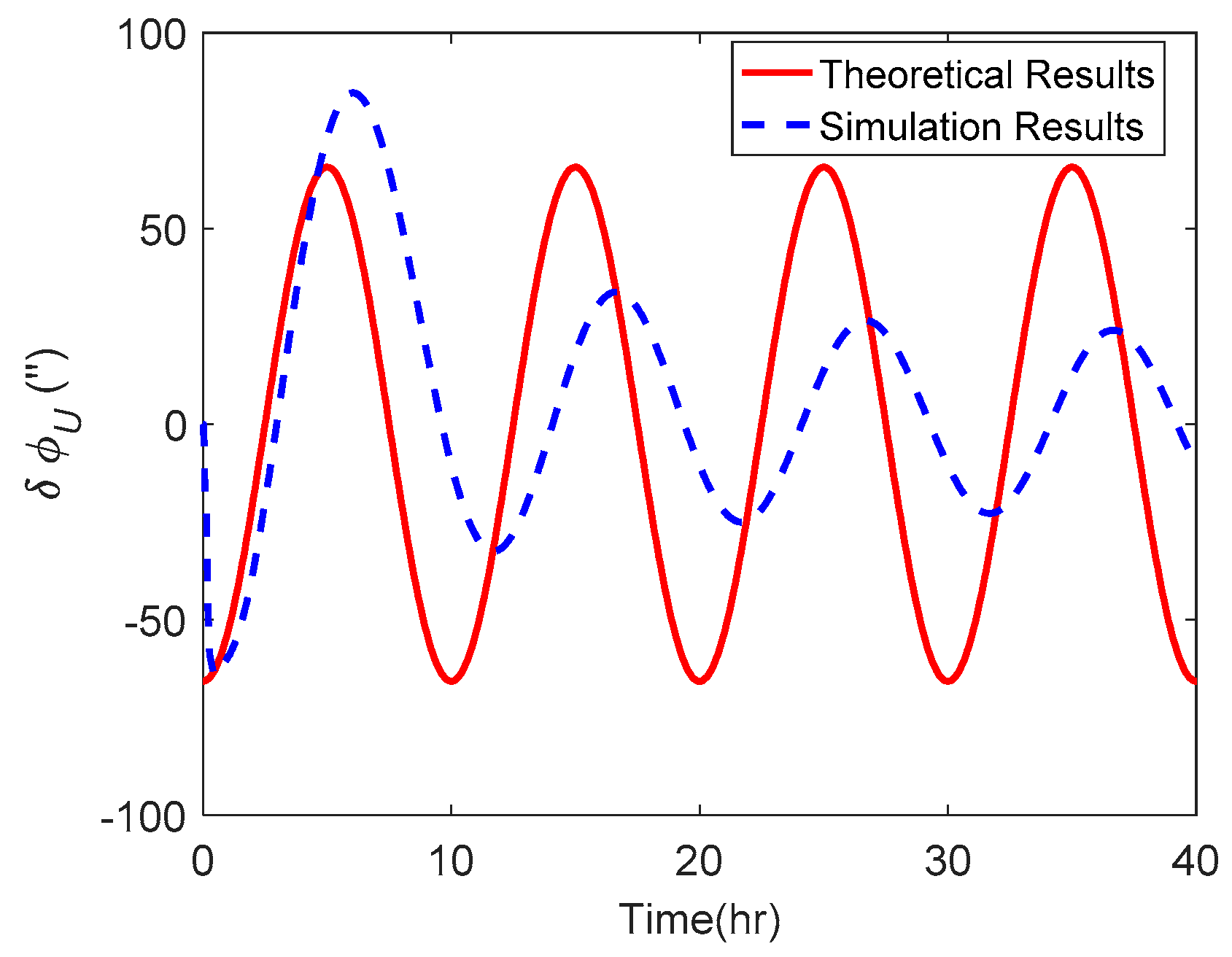
3.2. The Attitude Estimation Errors Caused by
4. Shipborne Marine Test
4.1. Data Description
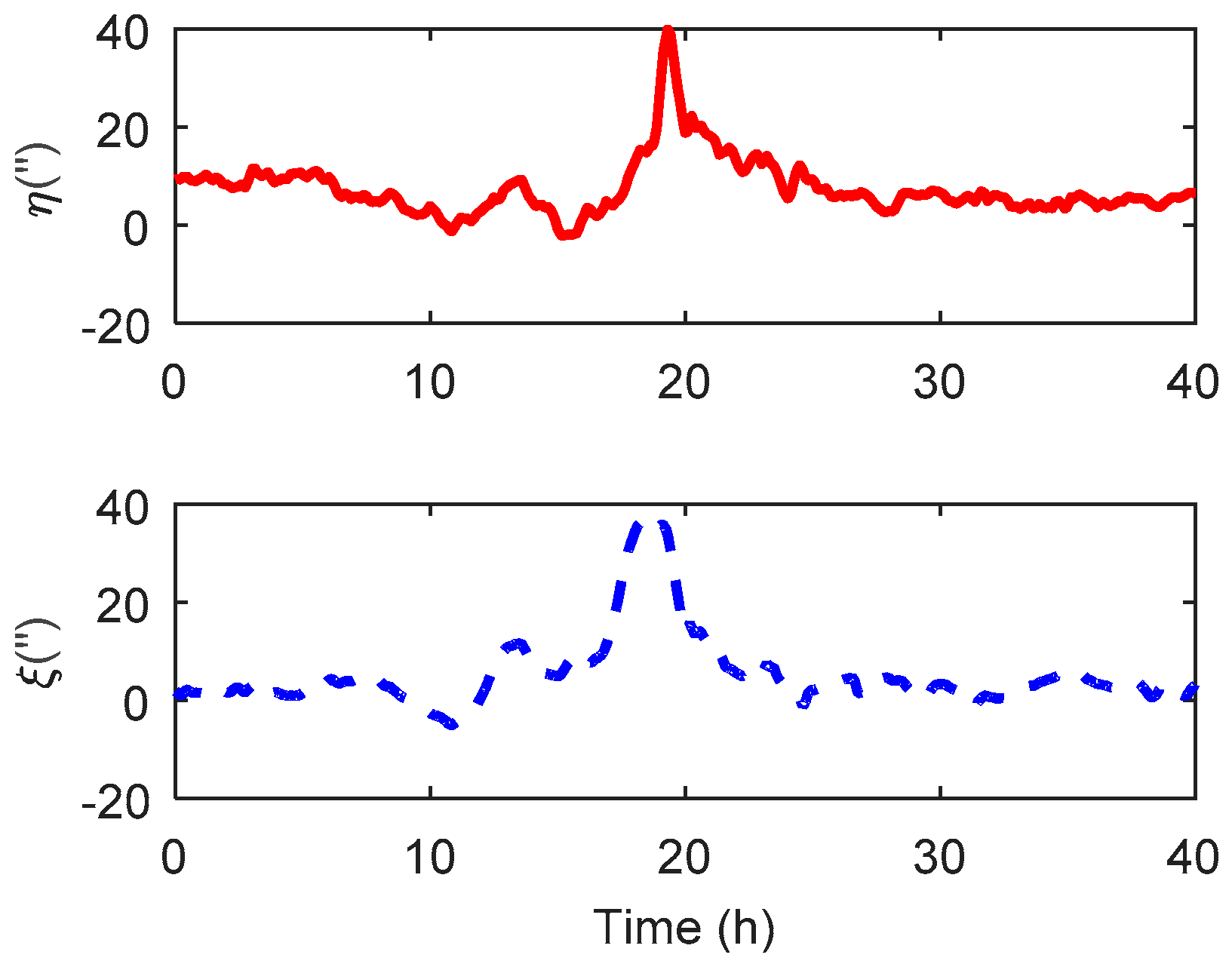
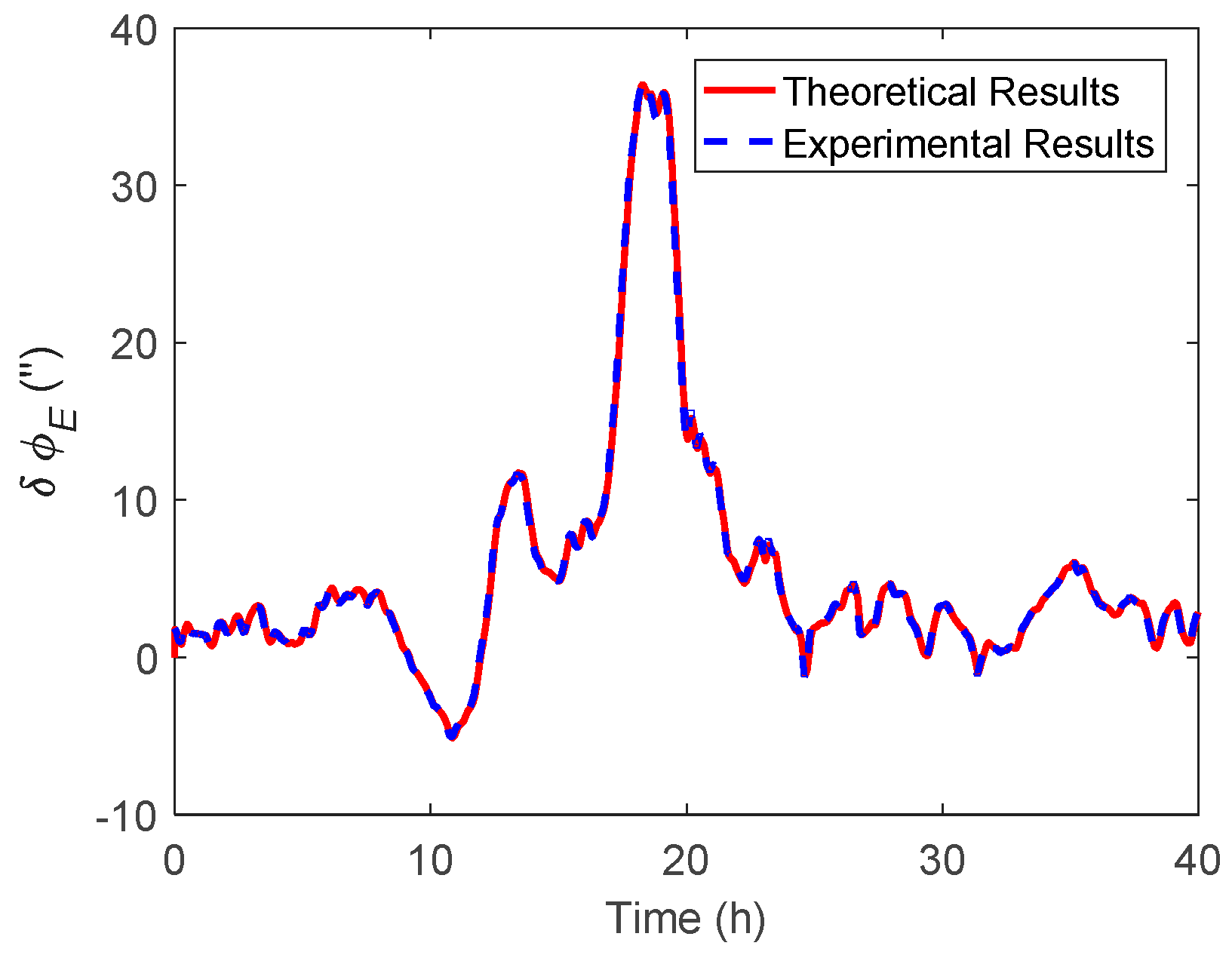
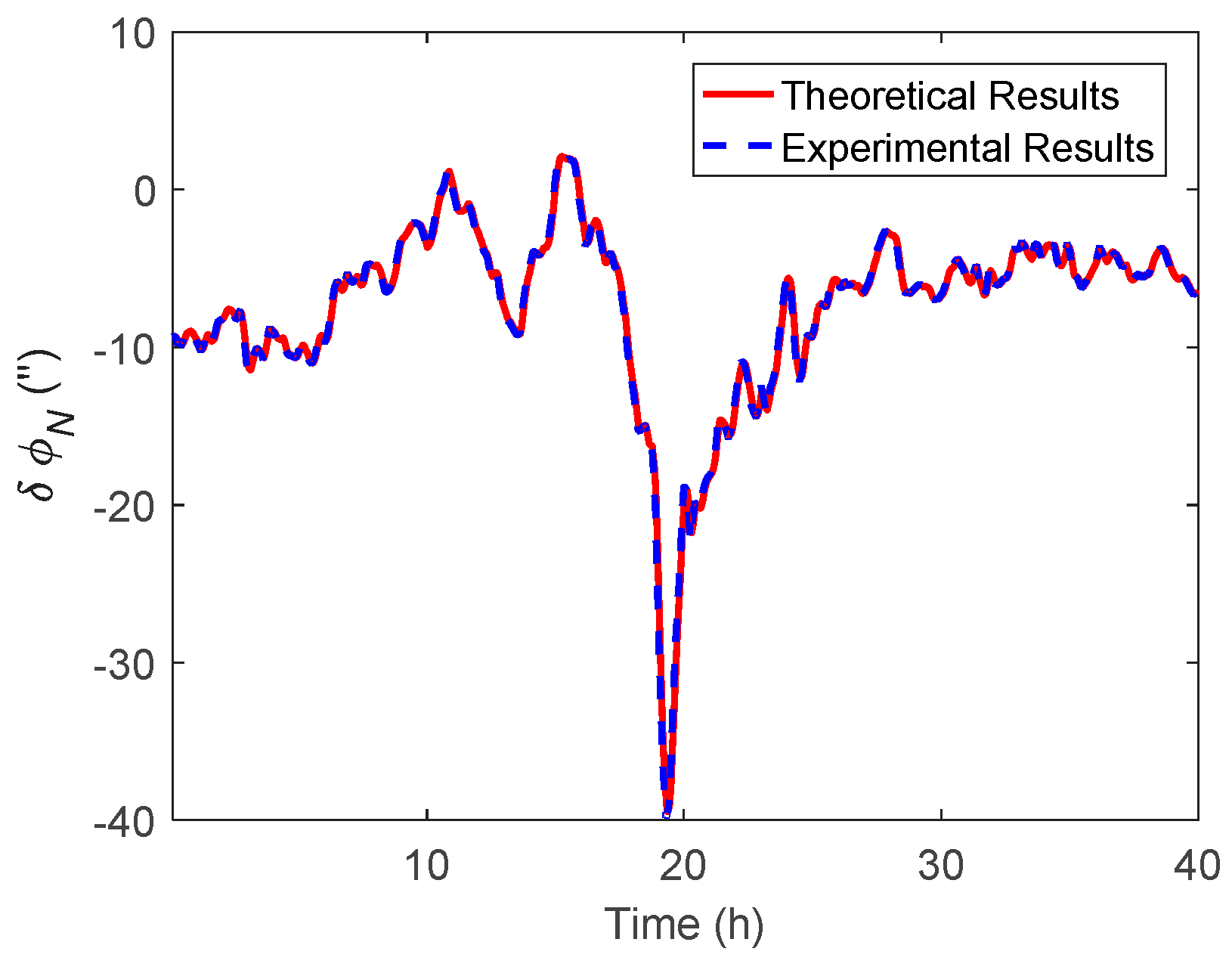
4.2. Data Processing
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jekeli, C. Precision free-inertial navigation with gravity compensation by an onboard gradiometer. J. Guid. Control. Dyn. 2006, 29, 704–713. [Google Scholar] [CrossRef]
- Wu, R.; Wu, Q.; Han, F.; Liu, T.; Hu, P.; Li, H. Gravity compensation using egm2008 for high-precision long-term inertial navigation systems. Sensors 2016, 16, 2177. [Google Scholar] [CrossRef]
- Zhou, J.; Knedlik, S.; Loffeld, O. Ins/gps tightly-coupled integration using adaptive unscented particle filter. J. Navig. 2010, 63, 491–511. [Google Scholar] [CrossRef]
- Zhou, J.; Yang, Y.; Zhang, J.; Edwan, E.; Loffeld, O.; Knedlik, S. Tightly-Coupled INS/GPS Using Quaternion-Based Unscented Kalman Filter. In Proceedings of the International Conference AIAA Guidance, Navigation, and Control, Portland, OR, USA, 8–11 August 2011; pp. 1–14. [Google Scholar]
- Grejner-Brzezinska, D.A.; Wang, J. Gravity modeling for high-accuracy gps/ins integration. Navigation 1998, 45, 209–220. [Google Scholar] [CrossRef]
- Jekeli, C. Gravity on precise, short-term, 3-d free-inertial navigation. Navigation 1997, 44, 347–357. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Moritz, H. Physical Geodesy; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Rogers, R.M. Applied Mathematics in Integrated Navigation Systems, 3rd ed.; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2007. [Google Scholar]
- Xiong, H.; Zhao, Y.; Wang, X.; Dai, D.; Zheng, J. An analysis of the effect of gravity anomaly to attitude estimation in high-precision gnss/ins integrated navigation systems under overturning cases. In Proceedings of the 2018 DGON Inertial Sensors and Systems (ISS), Braunschweig, Germany, 11–12 September 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–15. [Google Scholar]
- Gelb, A.; Levine, S.A. Effect of deflections of the vertical on the performance of a terrestrial inertial navigation system. J. Spacecr. Rocket. 1969, 6, 978–984. [Google Scholar] [CrossRef]
- Harriman, D.W.; Van Dam, C. Gravity-induced errors in airborne inertial navigation. J. Guid. Control. Dyn. 1986, 9, 419–426. [Google Scholar]
- Schwarz, K.-P. Gravity Induced Position Errors in Airborne Inertial Navigation; The Ohio State University: Columbus, OH, USA, 1981. [Google Scholar]
- Kasper, J.F., Jr. A second-order markov gravity anomaly model. J. Geophys. Res. 1971, 76, 7844–7849. [Google Scholar] [CrossRef]
- Jordan, S.K. Effects of geodetic uncertainties on a damped inertial navigation system. IEEE Trans. Aerosp. Electron. Syst. 1973, AES-9, 741–752. [Google Scholar] [CrossRef]
- Forsberg, R. A new covariance model for inertial gravimetry and gradiometry. J. Geophys. Res. Solid Earth 1987, 92, 1305–1310. [Google Scholar] [CrossRef]
- Moryl, J.; Rice, H.; Shinners, S. The universal gravity module for enhanced submarine navigation. In Proceedings of the IEEE 1998 Position Location and Navigation Symposium (Cat. No.98CH36153), Palm Springs, CA, USA, 20–23 April 1998; IEEE: Piscataway, NJ, USA, 1998; pp. 324–331. [Google Scholar]
- Richeson, J.A. Gravity Gradiometer Aided Inertial Navigation Within Non-Gnss Environments. Ph.D. Thesis, University of Maryland, College Park, MD, USA, 2008. [Google Scholar]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. An earth gravitational model to degree 2160: Egm2008. EGU Gen. Assem. 2008, 10, 13–18. [Google Scholar]
- Hirt, C.; Claessens, S.; Fecher, T.; Kuhn, M.; Pail, R.; Rexer, M. New ultrahigh-resolution picture of earth’s gravity field. Geophys. Res. Lett. 2013, 40, 4279–4283. [Google Scholar] [CrossRef]
- Tie, J.; Cao, J.; Wu, M.; Lian, J.; Cai, S.; Wang, L. Compensation of horizontal gravity disturbances for high precision inertial navigation. Sensors 2018, 18, 906. [Google Scholar]
- Zhou, X.; Yang, G.; Wang, J.; Wen, Z. A combined gravity compensation method for ins using the simplified gravity model and gravity database. Sensors 2018, 18, 1552. [Google Scholar] [CrossRef]
- Groves, P.D. Principles of Gnss, Inertial, and Multisensor Integrated Navigation Systems; Artech House: Norwood, MA, USA, 2013. [Google Scholar]
- Grejner-Brzezinska, D.A.; Da, R.; Toth, C. Gps error modeling and otf ambiguity resolution for high-accuracy gps/ins integrated system. J. Geod. 1998, 72, 626–638. [Google Scholar] [CrossRef]
- Grejner-Brzezinska, D.; Toth, C.; Yi, Y. On improving navigation accuracy of gps/ins systems. Photogramm. Eng. Remote Sens. 2005, 71, 377–389. [Google Scholar] [CrossRef]
- Rose, R.C.; Nash, R.A. Direct recovery of deflections of the vertical using an inertial navigator. IEEE Trans. Geosci. Electron. 1972, 10, 85–92. [Google Scholar] [CrossRef]
- Jekeli, C. Airborne vector gravimetry using precise, position-aided inertial measurement units. Bull. Géodésique 1994, 69, 1–11. [Google Scholar] [CrossRef]
- Dai, D.; Wang, X.; Zhan, D.; Huang, Z. An improved method for dynamic measurement of deflections of the vertical based on the maintenance of attitude reference. Sensors 2014, 14, 16322–16342. [Google Scholar] [CrossRef]
- Dai, D.; Wang, X.; Zhan, D.; Qin, S.; Huang, Z. Dynamic measurement of high-frequency deflections of the vertical based on the observation of ins/gnss integration attitude error. J. Appl. Geophys. 2015, 119, 89–98. [Google Scholar] [CrossRef]
- Levinson, E.; Ter Horst, J.; Willcocks, M. The next generation marine inertial navigator is here now. In Proceedings of the 1994 IEEE Position, Location and Navigation Symposium, Las Vegas, NV, USA, 11–15 April 1994; IEEE: Piscataway, NJ, USA, 1994; pp. 121–127. [Google Scholar]
- Gibbs, B.P. Advanced Kalman Filtering, Least-Squares and Modeling: A Practical Handbook; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Xie, G. Principles of gps and receiver design. Publ. House Electron. Ind. Beijing 2009, 7, 61–63. [Google Scholar]
- Sandwell, D.T.; Müller, R.D.; Smith, W.H.F.; Garcia, E.; Francis, R. New global marine gravity model from cryosat-2 and jason-1 reveals buried tectonic structure. Science 2014, 346, 65–67. [Google Scholar] [CrossRef]
- Dixon, K. Starfire: A Global Sbas for Sub-Decimeter Precise Point Positioning. In Proceedings of the ION GNSS 2006, Fort Worth, TX, USA, 26–29 September 2006. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| INS | Error items | Bias | White noise |
| Gyros | 0.003 °/h | 0.0005 °/√s | |
| Accelerometers | 10 mGal | 10 mGal/√s | |
| GNSS | Error items | Position | Velocity |
| Horizontal | 2 m | 0.03 m/s | |
| Vertical | 4 m | 0.06 m/s |
| Gyro | Accelerometer | |
|---|---|---|
| Bias instability | 0.003 °/h | 10 mGal |
| Random Walk | 0.0005 °/√h | 10 mGal.√s |
| Scale factor instability | <5 ppm | <5 ppm |
| Data update rate | 1 kHz | |
| Position accuracy (one-sigma) | Horizontal axis | 5 cm |
| Vertical axis | 10 cm | |
| Velocity accuracy (one-sigma) | Horizontal axis | 0.03 m/s |
| Vertical axis | 0.06 m/s | |
| Data update rate | 20 Hz | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, H.; Dai, D.; Zhao, Y.; Wang, X.; Zheng, J.; Zhan, D. An Analysis of the Attitude Estimation Errors Caused by the Deflections of Vertical in the Integration of Rotational INS and GNSS. Sensors 2019, 19, 1721. https://doi.org/10.3390/s19071721
Xiong H, Dai D, Zhao Y, Wang X, Zheng J, Zhan D. An Analysis of the Attitude Estimation Errors Caused by the Deflections of Vertical in the Integration of Rotational INS and GNSS. Sensors. 2019; 19(7):1721. https://doi.org/10.3390/s19071721
Chicago/Turabian StyleXiong, Hao, Dongkai Dai, Yingwei Zhao, Xingshu Wang, Jiaxing Zheng, and Dejun Zhan. 2019. "An Analysis of the Attitude Estimation Errors Caused by the Deflections of Vertical in the Integration of Rotational INS and GNSS" Sensors 19, no. 7: 1721. https://doi.org/10.3390/s19071721