
Smart Face Mask with an Integrated Heat Flux Sensor for Fast and Remote People’s Healthcare Monitoring



Abstract
:
1. Introduction
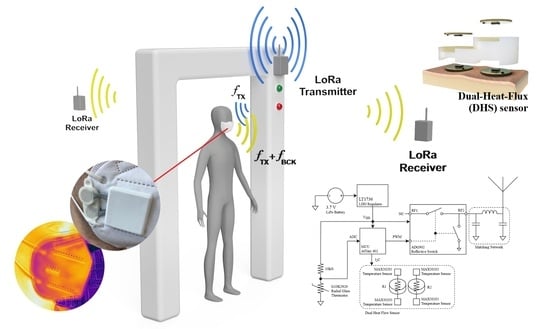
- A dual heat flux sensor has been integrated into a commercial FFP2 mask to determine body temperature by using cheek surface temperature.
- A thermistor has been integrated into the mask to measure the temperature of the air flow, thus being able to monitor both the respiratory rate and the episodes of coughing.
- Transmission is based on backscatter communication of the signal sent by a LoRa transmitter located next to an access door. The position of the sensor can be determined by comparing the power of the backscattered signal received by two LoRa receivers located on both sides of the access door.
- The system uses an inexpensive standard LoRa transceiver without any modifications, so no specialized receivers (e.g., software-defined radio) are required.
2. System Design
2.1. System Overview
2.2. Temperature Sensing
2.3. Breathing Monitoring
2.4. Tag Detection
3. Results
3.1. Calibration of the Temperature Sensor
3.2. Determination of Breathing Rate and Coughing Events
3.3. Wireless Measurement and Positioning
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gupta, M.; Abdelsalam, M.; Mittal, S. Enabling and enforcing social distancing measures using smart city and its infrastructures: A COVID-19 Use case. arXiv 2020, arXiv:2004.09246. [Google Scholar]
- Kaiser, M.S.; Mahmud, M.; Noor, M.B.T.; Zenia, N.Z.; Mamun, S.A.; Mahmud, K.M.A.; Azad, S.; Aradhya, V.N.M.; Stephan, P.; Stephan, T.; et al. Worksafe: Towards Healthy Workplaces During COVID-19 With an Intelligent Phealth App for Industrial Settings. IEEE Access 2021, 9, 13814–13828. [Google Scholar] [CrossRef]
- Gupta, D.; Bhatt, S.; Gupta, M.; Tosun, A.S. Future smart connected communities to fight COVID-19 outbreak. Internet Things 2021, 13, 100342. [Google Scholar] [CrossRef]
- Ray, P.P. An IR sensor based smart system to approximate core body temperature. J. Med. Syst. 2017, 41, 1–10. [Google Scholar] [CrossRef]
- Buoite Stella, A.; Manganotti, P.; Furlanis, G.; Accardo, A.; Ajčević, M. Return to school in the COVID-19 era: Considerations for temperature measurement. J. Med. Eng. Technol. 2020, 44, 468–471. [Google Scholar] [CrossRef]
- Cheng, Y.; Wang, C.; Zhong, J.; Lin, S.; Xiao, Y.; Zhong, Q.; Jiang, H.; Wu, N.; Li, W.; Chen, S.; et al. Electrospun polyetherimide electret nonwoven for bi-functional smart face mask. Nano Energy 2017, 34, 562–569. [Google Scholar] [CrossRef]
- Kim, N.; Wei, J.L.J.; Ying, J.; Zhang, H.; Moon, S.K.; Choi, J. A customized smart medical mask for healthcare personnel. In Proceedings of the 2020 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Singapore, 14–17 December 2020; pp. 581–585. [Google Scholar]
- Velluzzi, F.; Fois, A.; Dell’osa, A.; Tocco, F.; Bertetto, A.; Serra, C.; Melis, L.; Bertelli, U.; Concu, A. Mechatronic face mask anti COVID-19 to remotely record cardiorespiratory variables in farm’s workers engaged in jobs at high risk of infection. Int. J. Mech. Control 2021, 22, 61–76. [Google Scholar]
- Kalavakonda, R.R.; Masna, N.V.R.; Bhuniaroy, A.; Mandal, S.; Bhunia, S. A smart mask for active defense against Coronaviruses and other airborne pathogens. IEEE Consum. Electron. Mag. 2020, 10, 72–79. [Google Scholar] [CrossRef]
- Ghatak, B.; Banerjee, S.; Ali, S.B.; Bandyopadhyay, R.; Das, N.; Mandal, D.; Tudu, B. Design of a Self-powered Smart Mask for COVID-19. arXiv 2020, arXiv:2005.08305. [Google Scholar]
- Pan, L.; Wang, C.; Jin, H.; Li, J.; Yang, L.; Zheng, Y.; Wen, Y.; Tan, B.H.; Loh, X.J.; Chen, X. Lab-on-mask for remote respiratory monitoring. ACS Mater. Lett. 2020, 2, 1178–1181. [Google Scholar] [CrossRef]
- Kalavakonda, R.R.; Masna, N.V.R.; Mandal, S.; Bhunia, S. A smart mask for active defense against airborne pathogens. Sci. Rep. 2021, 11, 19910. [Google Scholar] [CrossRef]
- Fischer, H.F.; Wittmann, D.; Baucells Costa, A.; Zhou, B.; Joost, G.; Lukowicz, P. Masquare: A Functional Smart Mask Design for Health Monitoring. In Proceedings of the 2021 International Symposium on Wearable Computers, Virtual Conference, 21–26 September 2021; pp. 175–178. [Google Scholar] [CrossRef]
- Masna, N.V.R.; Kalavakonda, R.R.; Dizon, R.; Bhunia, S. Smart and Connected Mask for Protection beyond the Pandemic. In Proceedings of the 2021 IEEE International Midwest Symposium on Circuits and Systems (MWSCAS), Lansing, MI, USA, 9–11 August 2021 2021; pp. 676–679. [Google Scholar]
- Fois, A.; Tocco, F.; Dell’Osa, A.; Melis, L.; Bertelli, U.; Concu, A.; Bertetto, A.M.; Serra, C. Innovative Smart Face Mask to Protect Workers from COVID-19 Infection. In Proceedings of the 2021 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Lausanne, Switzerland, 23–25 June 2021; pp. 1–6. [Google Scholar]
- Van Huynh, N.; Hoang, D.T.; Lu, X.; Niyato, D.; Wang, P.; Kim, D.I. Ambient backscatter communications: A contemporary survey. IEEE Commun. Surv. Tutorials 2018, 20, 2889–2922. [Google Scholar] [CrossRef] [Green Version]
- Varshney, A.; Harms, O.; Pérez-Penichet, C.; Rohner, C.; Hermans, F.; Voigt, T. Lorea: A backscatter architecture that achieves a long communication range. In Proceedings of the 15th ACM Conference on Embedded Network Sensor Systems, Delft, The Netherlands, 6–8 November 2017; pp. 1–14. [Google Scholar]
- Liu, W.; Huang, K.; Zhou, X.; Durrani, S. Next generation backscatter communication: Systems, techniques, and applications. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 69. [Google Scholar] [CrossRef] [Green Version]
- Iyer, V.; Talla, V.; Kellogg, B.; Gollakota, S.; Smith, J. Inter-technology backscatter: Towards internet connectivity for implanted devices. In Proceedings of the 2016 ACM SIGCOMM Conference, Florianopolis, Brazil, 22–26 August 2016; pp. 356–369. [Google Scholar]
- Lazaro, A.; Lazaro, M.; Villarino, R. Room-Level Localization System Based on LoRa Backscatters. IEEE Access 2021, 9, 16004–16018. [Google Scholar] [CrossRef]
- Lazaro, M.; Lazaro, A.; Villarino, R. Feasibility of Backscatter Communication Using LoRAWAN Signals for Deep Implanted Devices and Wearable Applications. Sensors 2020, 20, 6342. [Google Scholar] [CrossRef]
- Lazaro, M.; Lazaro, A.; Villarino, R.; Gibau, D. Smart mask for temperature monitoring with LoRa backscattering communication. In Proceedings of the 2021 International Multidisciplinary Conference on Computer and Energy Science (SpliTech), Bol and Split, Croatia, 8–11 September 2021; pp. 1–3. [Google Scholar]
- Prata, J.C.; Silva, A.L.; Walker, T.R.; Duarte, A.C.; Rocha-Santos, T. COVID-19 pandemic repercussions on the use and management of plastics. Environ. Sci. Technol. 2020, 54, 7760–7765. [Google Scholar] [CrossRef] [PubMed]
- Ilsley, A.; Rutten, A.; Runciman, W. An evaluation of body temperature measurement. Anaesth. Intensive Care 1983, 11, 31–39. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fulbrook, P. Core body temperature measurement: A comparison of axilla, tympanic membrane and pulmonary artery blood temperature. Intensive Crit. Care Nurs. 1997, 13, 266–272. [Google Scholar] [CrossRef]
- Teran, C.; Torrez-Llanos, J.; Teran-Miranda, T.; Balderrama, C.; Shah, N.; Villarroel, P. Clinical accuracy of a non-contact infrared skin thermometer in paediatric practice. Child Care Health Dev. 2012, 38, 471–476. [Google Scholar] [CrossRef] [PubMed]
- Cui, S.; Sun, B.; Sun, X. A method for improving temperature measurement accuracy on an infrared thermometer for the ambient temperature field. Rev. Sci. Instruments 2020, 91, 054903. [Google Scholar] [CrossRef]
- Shajkofci, A. Correction of human forehead temperature variations measured by non-contact infrared thermometer. IEEE Sens. J. 2021. [Google Scholar] [CrossRef]
- Goh, N.W.J.; Poh, J.J.; Yeo, J.Y.; Aw, B.J.J.; Lai, S.C.; Cheng, J.J.W.; Tan, C.Y.L.; Gan, S.K.E. Design and Development of a Low Cost, Non-Contact Infrared Thermometer with Range Compensation. Sensors 2021, 21, 3817. [Google Scholar] [CrossRef]
- Gunga, H.C.; Sandsund, M.; Reinertsen, R.E.; Sattler, F.; Koch, J. A non-invasive device to continuously determine heat strain in humans. J. Therm. Biol. 2008, 33, 297–307. [Google Scholar] [CrossRef]
- Kitamura, K.I.; Zhu, X.; Chen, W.; Nemoto, T. Development of a new method for the noninvasive measurement of deep body temperature without a heater. Med. Eng. Phys. 2010, 32, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Feng, J.; Zhou, C.; He, C.; Li, Y.; Ye, X. Development of an improved wearable device for core body temperature monitoring based on the dual heat flux principle. Physiol. Meas. 2017, 38, 652. [Google Scholar] [CrossRef]
- Miller, D.J.; Capodilupo, J.V.; Lastella, M.; Sargent, C.; Roach, G.D.; Lee, V.H.; Capodilupo, E.R. Analyzing changes in respiratory rate to predict the risk of COVID-19 infection. PLoS ONE 2020, 15, e0243693. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Karis, A.J.; Buller, M.J.; Santee, W.R. Relationship between core temperature, skin temperature, and heat flux during exercise in heat. Eur. J. Appl. Physiol. 2013, 113, 2381–2389. [Google Scholar] [CrossRef] [PubMed]
- Steinhart, J.S.; Hart, S.R. Calibration curves for thermistors. Deep. Sea Res. Oceanogr. Abstr. 1968, 15, 497–503. [Google Scholar] [CrossRef]
- Milici, S.; Lázaro, A.; Villarino, R.; Girbau, D.; Magnarosa, M. Wireless Wearable Magnetometer-Based Sensor for Sleep Quality Monitoring. IEEE Sens. J. 2018, 18, 2145–2152. [Google Scholar] [CrossRef]
- Milici, S.; Lorenzo, J.; Lázaro, A.; Villarino, R.; Girbau, D. Wireless Breathing Sensor Based on Wearable Modulated Frequency Selective Surface. IEEE Sens. J. 2017, 17, 1285–1292. [Google Scholar] [CrossRef]
- Talla, V.; Hessar, M.; Kellogg, B.; Najafi, A.; Smith, J.R.; Gollakota, S. Lora backscatter: Enabling the vision of ubiquitous connectivity. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2017, 1, 1–24. [Google Scholar] [CrossRef]
- Peng, Y.; Shangguan, L.; Hu, Y.; Qian, Y.; Lin, X.; Chen, X.; Fang, D.; Jamieson, K. PLoRa: A passive long-range data network from ambient LoRa transmissions. In Proceedings of the 2018 Conference of the ACM Special Interest Group on Data Communication, Budapest, Hungary, 20–25 August 2018; pp. 147–160. [Google Scholar]
- Nikitin, P.; Rao, K.; Lam, S.; Pillai, V.; Martinez, R.; Heinrich, H. Power reflection coefficient analysis for complex impedances in RFID tag design. IEEE Trans. Microw. Theory Tech. 2005, 53, 2721–2725. [Google Scholar] [CrossRef]
- Nemoto, T.; Togawa, T. Improved probe for a deep body thermometer. Med. Biol. Eng. Comput. 1988, 26, 456–459. [Google Scholar] [CrossRef]
- Andrade, C.B.; Hoefel, R.P.F. IEEE 802.11 WLANs: A comparison on indoor coverage models. In Proceedings of the CCECE 2010, Calgary, AB, Canada, 2–5 May 2010; pp. 1–6. [Google Scholar]
- Obeidat, H.; Asif, R.; Ali, N.; Dama, Y.; Obeidat, O.; Jones, S.; Shuaieb, W.; Al-Sadoon, M.A.; Hameed, K.; Alabdullah, A.; et al. An indoor path loss prediction model using wall correction factors for wireless local area network and 5G indoor networks. Radio Sci. 2018, 53, 544–564. [Google Scholar] [CrossRef]
- Lu, S.H.; Dai, Y.T. Normal body temperature and the effects of age, sex, ambient temperature and body mass index on normal oral temperature: A prospective, comparative study. Int. J. Nurs. Stud. 2009, 46, 661–668. [Google Scholar] [CrossRef]
- Lefrant, J.Y.; Muller, L.; de La Coussaye, J.E.; Benbabaali, M.; Lebris, C.; Zeitoun, N.; Mari, C.; Saissi, G.; Ripart, J.; Eledjam, J.J. Temperature measurement in intensive care patients: Comparison of urinary bladder, oesophageal, rectal, axillary, and inguinal methods versus pulmonary artery core method. Intensive Care Med. 2003, 29, 414–418. [Google Scholar] [CrossRef] [PubMed]
- Yamakage, M.; Namiki, A. Deep temperature monitoring using a zero-heat-flow method. J. Anesth. 2003, 17, 108–115. [Google Scholar] [CrossRef]
- Miozzi, C.; Amendola, S.; Bergamini, A.; Marrocco, G. Reliability of a re-usable wireless Epidermal temperature sensor in real conditions. In Proceedings of the 2017 IEEE 14th International Conference on Wearable and Implantable Body Sensor Networks (BSN), Eindhoven, The Netherlands, 9–12 May 2017; pp. 95–98. [Google Scholar]
- Camera, F.; Miozzi, C.; Amato, F.; Occhiuzzi, C.; Marrocco, G. Experimental assessment of wireless monitoring of Axilla temperature by means of epidermal battery-less rfid sensors. IEEE Sens. Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef]
- Miozzi, C.; Amato, F.; Marrocco, G. Performance and durability of thread antennas as stretchable epidermal UHF RFID tags. IEEE J. Radio Freq. Identif. 2020, 4, 398–405. [Google Scholar] [CrossRef]
- Occhiuzzi, C.; Parrella, S.; Marrocco, G. Flexible Dual chip on-skin RFID Sensor for Body Temperature Monitoring. In Proceedings of the 2020 IEEE International Conference on Flexible and Printable Sensors and Systems (FLEPS), Manchester, UK, 16–19 August 2020; pp. 1–4. [Google Scholar]
- Huang, M.; Tamura, T.; Yoshimura, T.; Tsuchikawa, T.; Kanaya, S. Wearable deep body thermometers and their uses in continuous monitoring for daily healthcare. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 177–180. [Google Scholar] [CrossRef]
- Jiang, Y.; Pan, K.; Leng, T.; Hu, Z. Smart textile integrated wireless powered near field communication body temperature and sweat sensing system. IEEE J. Electromagn. RF Microwaves Med. Biol. 2019, 4, 164–170. [Google Scholar] [CrossRef] [Green Version]
- Fox, R.; Solman, A.; Isaacs, R.; Fry, A.; MacDonald, I. A new method for monitoring deep body temperature from the skin surface. Clin. Sci. Mol. Med. 1973, 44, 81–86. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, H.Y.; Chen, A.; Chen, C. Investigation of the impact of infrared sensors on core body temperature monitoring by comparing measurement sites. Sensors 2020, 20, 2885. [Google Scholar] [CrossRef] [PubMed]
- Lazaro, A.; Villarino, R.; Girbau, D. A survey of NFC sensors based on energy harvesting for IoT applications. Sensors 2018, 18, 3746. [Google Scholar] [CrossRef] [PubMed] [Green Version]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Attenuation due to obstacles | 15 dB | |
| Path loss exponent for transmitter to backscatter path | 3 | |
| Path loss exponent for backscatter to receiver path | 3 | |
| Breakpoint distance for backscatter path | 1.5 m | |
| Breakpoint distance for backscatter to receiver path | 1.5 m | |
| Blockage exponent for the transmitter | 4.5 | |
| Blockage exponent for the receiver | 4.5 | |
| Extension of blockage distance in the transmitter | 1.5 m | |
| Extension of blockage distance in the receiver | 1.5 m |
| Ref. | Technology | Advantages | Disavantages |
|---|---|---|---|
| Com. | Infrared Thermometer | Cheap | Operator needed. Close detection. Affected by external environment and conditions. Affected by body thermoregulation. |
| Com. | Thermo-scanner | Remote detection | Expensive. Affected by external environment and conditions. Affected by body thermoregulation. |
| Com. | Tympanic Thermometer | Cheap. Estimate of core temperature. | Operator needed. Close detection. |
| Com. | Axillary Thermometer | Cheap. Estimate of core temperature. | Close detection. |
| [46] | Zero-flux method | Estimate of core temperature. | Commercial available but wired. Power consumption for the heater. |
| [47,48,49,50] | UHF RFID | Cheap epidermal tag. | Expensive reader. Measurement depend on the position. Can be affected by external environment. |
| [32,51] | BLE and Dual Flow heat | Wireless measurement. Estimate of core temperature. Mobile as a reader. | Need a head band. Does not measure breathing or location. Requires authentication. Long-range. |
| [52] | NFC | Cheap. Mobile as a reader. | Measures the skin surface temperature. Measurement depend on the position. Affected by external environment and conditions. Affected by body thermoregulation. Short-range. |
| This work | LoRa Backscatter | Cheap. Estimation of core temperature. Estimation of breathing rate. Location. Uses commercial LoRa transceivers.Integrated in a mask. Long-range. Cough detection. | Battery-assisted. Low data transfer. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lazaro, M.; Lazaro, A.; Villarino, R.; Girbau, D. Smart Face Mask with an Integrated Heat Flux Sensor for Fast and Remote People’s Healthcare Monitoring. Sensors 2021, 21, 7472. https://doi.org/10.3390/s21227472
Lazaro M, Lazaro A, Villarino R, Girbau D. Smart Face Mask with an Integrated Heat Flux Sensor for Fast and Remote People’s Healthcare Monitoring. Sensors. 2021; 21(22):7472. https://doi.org/10.3390/s21227472
Chicago/Turabian StyleLazaro, Marc, Antonio Lazaro, Ramon Villarino, and David Girbau. 2021. "Smart Face Mask with an Integrated Heat Flux Sensor for Fast and Remote People’s Healthcare Monitoring" Sensors 21, no. 22: 7472. https://doi.org/10.3390/s21227472
APA StyleLazaro, M., Lazaro, A., Villarino, R., & Girbau, D. (2021). Smart Face Mask with an Integrated Heat Flux Sensor for Fast and Remote People’s Healthcare Monitoring. Sensors, 21(22), 7472. https://doi.org/10.3390/s21227472