
Online Frequency Response Analysis of Electric Machinery through an Active Coupling System Based on Power Electronics

 ,
,  ,
,  ,
,  and
and
Abstract
:1. Introduction
2. Methods
2.1. Frequency Response Analysis
2.2. Passive Coupling and Its Effects on the Spectra
2.3. Proposed Active Coupling Based on Power Electronics Converter
2.3.1. Modular Multilevel Converter—MMC
2.3.2. Proportional plus Resonant Controller—PR
3. Results and Discussion
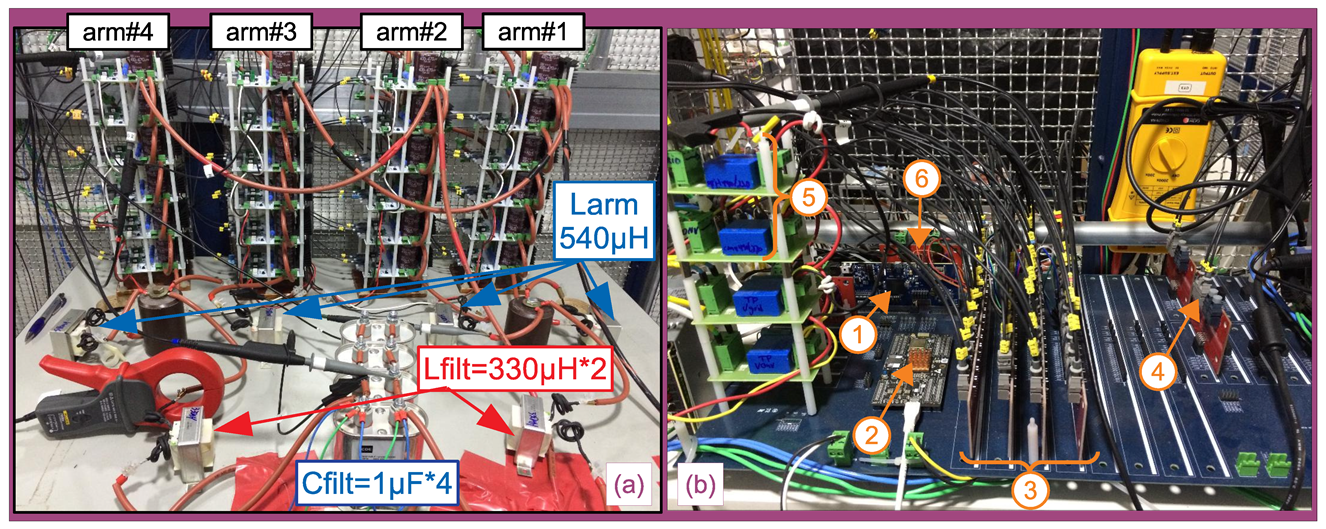
- DSP TMS320F28379D ControlCard [42].
- FPGA system-on-module snickerdoodle [43].
- Four optical fiber interface boards between the FPGA and the SM boards. Each of these boards can interface to six SM boards and are presented in detail in [41].
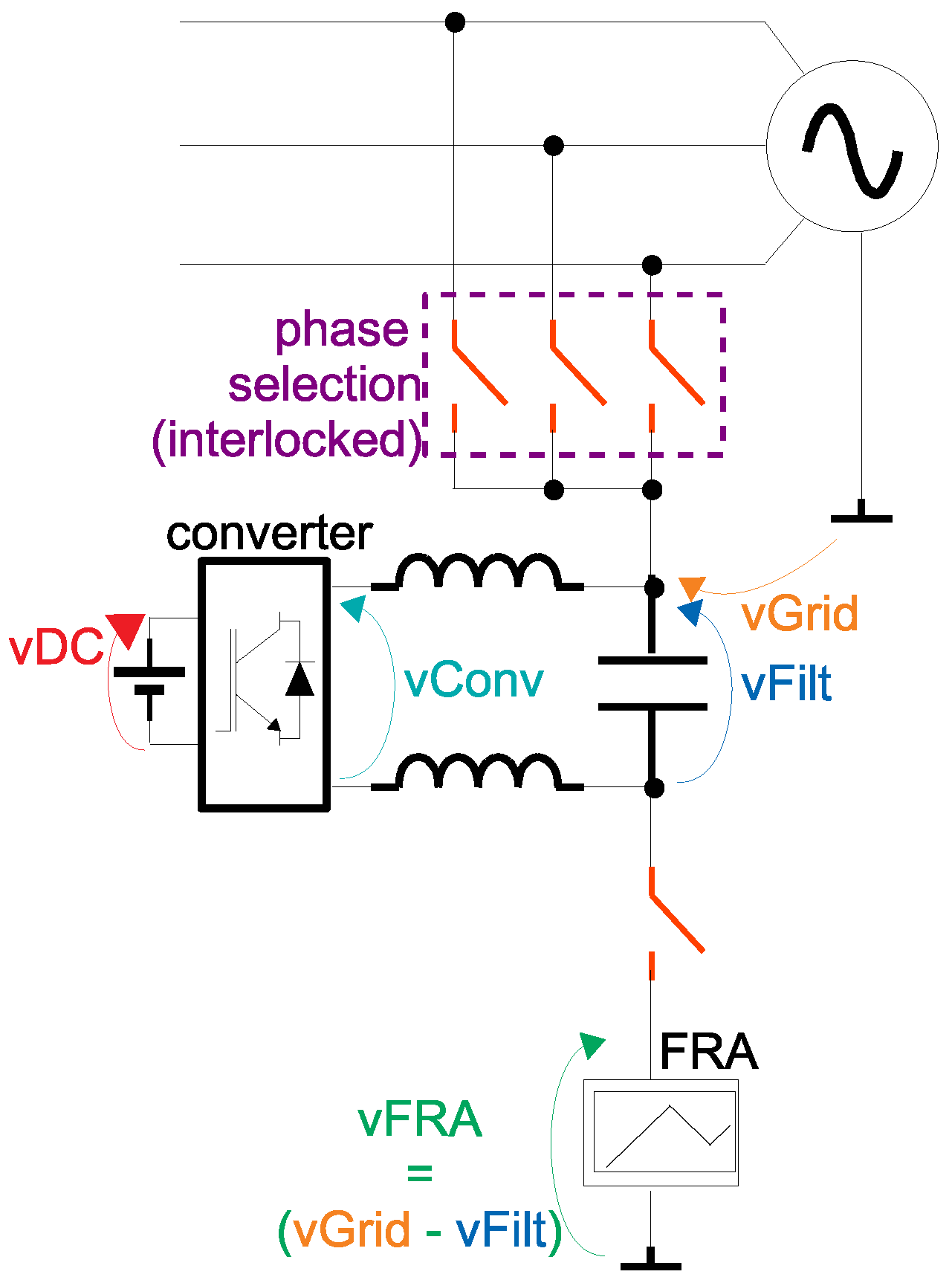
- Hall effect sensors for and of Figure 3. These boards isolated and converted the nominal voltages of the machine under testing and DC-AC converter to signals between and , referenced to a common ground.
- Analog signal conditioning board (presented in detail in [41]). These boards fit the output of the Hall effect sensors to the range of 0 V to of the analog channels of the DSP.
3.1. Operation of the bi-Phase MMC Converter
3.2. Active Voltage Blocking
3.3. Offline FRA
- Blue for the baseline condition (three groups at baseline condition were measured, although only the first group is shown in the figure);
- Red for the condition with a capacitor of 450 nF inserted on the 2% tap (two groups at 450 nF condition were measured, although only the first group is shown in the figure);
- Green for the condition with a capacitor of 1 F inserted on the 2% tap (two groups in 1 F condition were measured, although only the first group is shown in the figure).
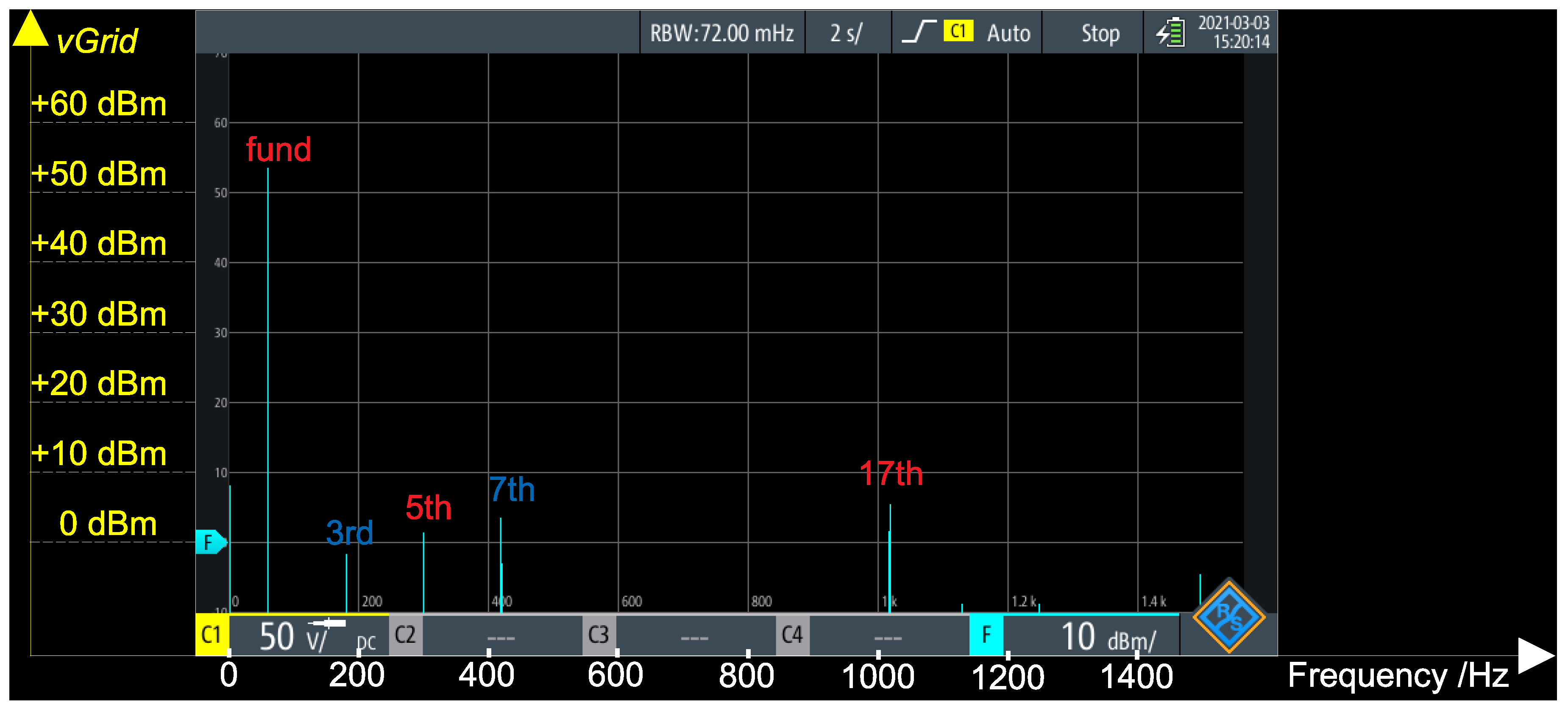
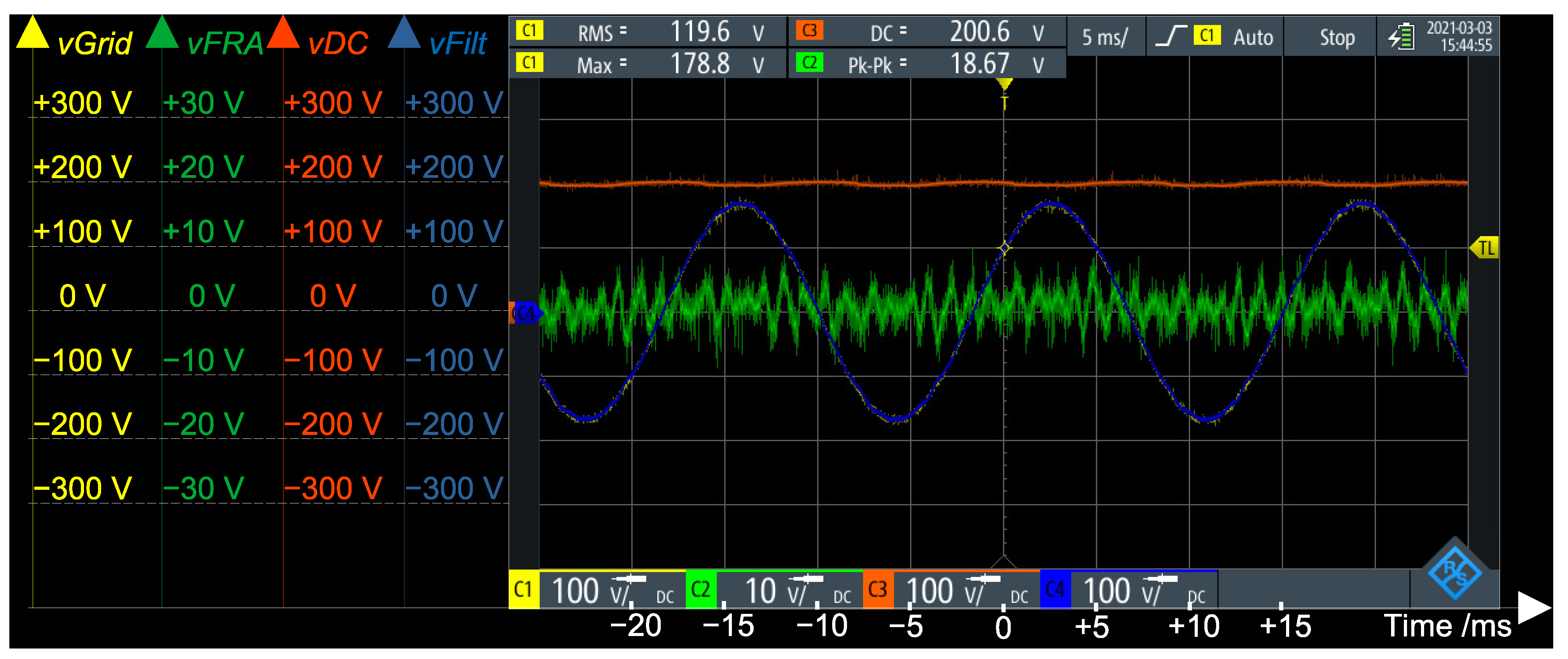
3.4. Online FRA
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADC | Analog-to-Digital Converter |
| CBM | Condition Based Maintenance |
| DAC | Digital-to-Analog Converter |
| DFT | Discrete Fourier Transform |
| DSP | Digital Signal Processor |
| FFT | Fast Fourier Transform |
| FPGA | Field Programmable Gate Array |
| FRA | Frequency Response Analysis |
| IFRA | Impulse Frequency Response Analysis |
| IGBT | Insulated-Gate Bipolar Transistor |
| MMC | Modular Multilevel Converter |
| PLC | Power-Line Communication/Carrier |
| PI | Proportional-Integral |
| PR | Proportional plus Resonant |
| PWM | Pulse Width Modulation |
| SFRA | Sweep Frequency Response Analysis |
| SM | Submodule |
| SPI | Serial Peripheral Interface |
| THD | Total Harmonic Distortion |
Appendix A. Amplitude Extraction through DFT
References
- Salomon, C.P.; Ferreira, C.; Sant’Ana, W.C.; Lambert-Torres, G.; Borges da Silva, L.E.; Bonaldi, E.L.; de Oliveira, L.E.d.L.; Torres, B.S. A Study of Fault Diagnosis Based on Electrical Signature Analysis for Synchronous Generators Predictive Maintenance in Bulk Electric Systems. Energies 2019, 12, 1506. [Google Scholar] [CrossRef] [Green Version]
- Kafeel, A.; Aziz, S.; Awais, M.; Khan, M.A.; Afaq, K.; Idris, S.A.; Alshazly, H.; Mostafa, S.M. An Expert System for Rotating Machine Fault Detection Using Vibration Signal Analysis. Sensors 2021, 21, 7587. [Google Scholar] [CrossRef] [PubMed]
- Ribeiro, L.C.; Bonaldi, E.L.; de Oliveira, L.E.L.; da Silva, L.E.; Salomon, C.P.; Santana, W.C.; da Silva, J.G.B.; Lambert-Torres, G. Equipment for Predictive Maintenance in Hydrogenerators. AASRI Procedia 2014, 7, 75–80. [Google Scholar] [CrossRef]
- Verellen, T.; Verbelen, F.; Stockman, K.; Steckel, J. Beamforming Applied to Ultrasound Analysis in Detection of Bearing Defects. Sensors 2021, 21, 6803. [Google Scholar] [CrossRef]
- Smieja, M.; Mamala, J.; Praznowski, K.; Cieplinski, T.; Szumilas, L. Motion Magnification of Vibration Image in Estimation of Technical Object Condition-Review. Sensors 2021, 21, 6572. [Google Scholar] [CrossRef]
- IEEE-Std-C57.149. IEEE Guide for the Application and Interpretation of Frequency Response Analysis for Oil-Immersed Transformers; IEEE Std C57.149-2012; IEEE: Piscataway, NJ, USA, 2013; pp. 1–72. [Google Scholar] [CrossRef]
- Blanquez, F.R.; Platero, C.A.; Rebollo, E.; Blanquez, F. Evaluation of the applicability of FRA for inter-turn fault detection in stator windings. In Proceedings of the 2013 9th IEEE International Symposium on Diagnostics for Electric Machines, Power Electronics and Drives (SDEMPED), Valencia, Spain, 27–30 August 2013; pp. 177–182. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Castilla, A.E.; Sanchez-Fernandez, J.A.; Platero, C.A. Fluid Degradation Measurement Based on a Dual Coil Frequency Response Analysis. Sensors 2020, 20, 4155. [Google Scholar] [CrossRef]
- Al-Ameri, S.M.; Almutairi, A.; Kamarudin, M.S.; Yousof, M.F.M.; Abu-Siada, A.; Mosaad, M.I.; Alyami, S. Application of Frequency Response Analysis Technique to Detect Transformer Tap Changer Faults. Appl. Sci. 2021, 11, 3128. [Google Scholar] [CrossRef]
- Kumar, A.; Bhalja, B.R.; Kumbhar, G. An Approach for Identification of Inter-Turn Fault Location in Transformer Windings using Sweep Frequency Response Analysis. IEEE Trans. Power Deliv. 2021. [Google Scholar] [CrossRef]
- Pramanik, S.; Ganesh, A.; Duvvury, V.S.B.C. Double-End Excitation of A Single Isolated Transformer Winding: An Improved Frequency Response Analysis for Fault Detection. IEEE Trans. Power Deliv. 2021. Early Access. [Google Scholar] [CrossRef]
- Reykherdt, A.A.; Davydov, V. Case studies of factors influencing frequency response analysis measurements and power transformer diagnostics. IEEE Electr. Insul. Mag. 2011, 27, 22–30. [Google Scholar] [CrossRef]
- Bagheri, M.; Phung, B.T.; Blackburn, T. Influence of temperature and moisture content on frequency response analysis of transformer winding. Dielectr. Electr. Insul. IEEE Trans. 2014, 21, 1393–1404. [Google Scholar] [CrossRef]
- Platero, C.A.; Blazquez, F.; Frias, P.; Ramirez, D. Influence of Rotor Position in FRA Response for Detection of Insulation Failures in Salient-Pole Synchronous Machines. IEEE Trans. Energy Convers. 2011, 26, 671–676. [Google Scholar] [CrossRef]
- Sant’Ana, W.C.; Lambert-Torres, G.; Borges da Silva, L.E.; Bonaldi, E.L.; de Lacerda de Oliveira, L.E.; Salomon, C.P.; Borges da Silva, J.G. Influence of rotor position on the repeatability of frequency response analysis measurements on rotating machines and a statistical approach for more meaningful diagnostics. Electr. Power Syst. Res. 2016, 133, 71–78. [Google Scholar] [CrossRef]
- Ryder, S.A. Diagnosing transformer faults using frequency response analysis. IEEE Electr. Insul. Mag. 2003, 19, 16–22. [Google Scholar] [CrossRef]
- Sant’Ana, W.C.; Salomon, C.P.; Lambert-Torres, G.; Silva, L.E.B.; Bonaldi, E.L.; Oliveira, L.E.L.; Silva, J.G.B. A survey on statistical indexes applied on frequency response analysis of electric machinery and a trend based approach for more reliable results. Electr. Power Syst. Res. 2016, 137, 26–33. [Google Scholar] [CrossRef]
- Al-Ameri, S.M.A.N.; Kamarudin, M.S.; Yousof, M.F.M.; Salem, A.A.; Banakhr, F.A.; Mosaad, M.I.; Abu-Siada, A. Understanding the Influence of Power Transformer Faults on the Frequency Response Signature Using Simulation Analysis and Statistical Indicators. IEEE Access 2021, 9, 70935–70947. [Google Scholar] [CrossRef]
- De Andrade Ferreira, R.S.; Picher, P.; Ezzaidi, H.; Fofana, I. Frequency Response Analysis Interpretation Using Numerical Indices and Machine Learning: A Case Study Based on a Laboratory Model. IEEE Access 2021, 9, 67051–67063. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, Y.; Abu-Siada, A.; Chen, X.; Li, Z.; Xu, Y.; Zhang, L.; Tong, Y. Fault Diagnosis of Transformer Windings Based on Decision Tree and Fully Connected Neural Network. Energies 2021, 14, 1531. [Google Scholar] [CrossRef]
- Gomez-Luna, E.; Aponte Mayor, G.; Gonzalez-Garcia, C.; Pleite Guerra, J. Current Status and Future Trends in Frequency-Response Analysis With a Transformer in Service. IEEE Trans. Power Deliv. 2013, 28, 1024–1031. [Google Scholar] [CrossRef]
- Zhao, Z.; Tang, C.; Yao, C.; Zhou, Q.; Xu, L.; Gui, Y.; Islam, S. Improved Method to Obtain the Online Impulse Frequency Response Signature of a Power Transformer by Multi Scale Complex CWT. IEEE Access 2018, 6, 48934–48945. [Google Scholar] [CrossRef]
- Arunachalam, K.; Madanmohan, B.; Rajamani, R.; Prabaharan, N.; Haes Alhelou, H.; Siano, P. Extended Use for the Frequency Response Analysis: Switching Impulse Voltage Based Preliminary Diagnosis of Potential Sources of Partial Discharges in Transformer. Appl. Sci. 2020, 10, 8283. [Google Scholar] [CrossRef]
- Arunachalam, K.; Madanmohan, B.; Rajamani, R. Extended Application for the Impulse-Based Frequency Response Analysis: Preliminary Diagnosis of Partial Discharges in Transformer. IEEE Access 2020, 8, 226897–226906. [Google Scholar] [CrossRef]
- Rahimpour, H.; Mitchell, S.; Tusek, J. The application of sweep frequency response analysis for the online monitoring of power transformers. In Proceedings of the 2016 Australasian Universities Power Engineering Conference (AUPEC), Brisbane, Australia, 25–28 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Sant’Ana, W.C.; Salomon, C.P.; Lambert-Torres, G.; Silva, L.E.B.; Bonaldi, E.L.; Oliveira, L.E.L.; Silva, J.G.B. Early detection of insulation failures on electric generators through online Frequency Response Analysis. Electr. Power Syst. Res. 2016, 140, 337–343. [Google Scholar] [CrossRef]
- Bagheri, M.; Nezhivenko, S.; Phung, B.T. Loss of low-frequency data in on- line frequency response analysis of transformers. IEEE Electr. Insul. Mag. 2017, 33, 32–39. [Google Scholar] [CrossRef]
- Sant’Ana, W.C.; Salomon, C.P.; Lambert-Torres, G.; Borges da Silva, L.E.; Bonaldi, E.L.; de Lacerda de Oliveira, L.E.; Borges da Silva, J.G. On the use of hypothesis tests as statistical indexes for frequency response analysis of electric machinery. Electr. Power Syst. Res. 2017, 147, 245–253. [Google Scholar] [CrossRef]
- Lamarre, L.; Picher, P. Impedance Characterization of Hydro Generator Stator Windings and Preliminary Results of FRA Analysis. In Proceedings of the Conference Record of the 2008 IEEE International Symposium on Electrical Insulation, Vancouver, BC, Canada, 9–12 June 2008; pp. 227–230. [Google Scholar] [CrossRef]
- Badgujar, K.P.; Maoyafikuddin, M.; Kulkarni, S.V. Alternative statistical techniques for aiding SFRA diagnostics in transformers. IET Gener. Transm. Distrib. 2012, 6, 189–198. [Google Scholar] [CrossRef]
- Kim, J.W.; Park, B.; Jeong, S.C.; Kim, S.W.; Park, P. Fault diagnosis of a power transformer using an improved frequency-response analysis. IEEE Trans. Power Deliv. 2005, 20, 169–178. [Google Scholar] [CrossRef]
- Secue, J.R.; Mombello, E. Sweep frequency response analysis (SFRA) for the assessment of winding displacements and deformation in power transformers. Electr. Power Syst. Res. 2008, 78, 1119–1128. [Google Scholar] [CrossRef]
- Singh, B.; Al-Haddad, K.; Chandra, A. A review of active filters for power quality improvement. IEEE Trans. Ind. Electron. 1999, 46, 960–971. [Google Scholar] [CrossRef] [Green Version]
- Debnath, S.; Qin, J.; Bahrani, B.; Saeedifard, M.; Barbosa, P. Operation, Control, and Applications of the Modular Multilevel Converter: A Review. IEEE Trans. Power Electron. 2015, 30, 37–53. [Google Scholar] [CrossRef]
- Li, B.; Yang, R.; Xu, D.; Wang, G.; Wang, W.; Xu, D. Analysis of the Phase-Shifted Carrier Modulation for Modular Multilevel Converters. IEEE Trans. Power Electron. 2014, 30, 297–310. [Google Scholar] [CrossRef]
- Sant’Ana, W.C.; Gonzatti, R.B.; Lambert-Torres, G.; Bonaldi, E.L.; Torres, B.S.; de Oliveira, P.A.; Pereira, R.R.; Borges-da Silva, L.E.; Mollica, D.; Santana Filho, J. Development and 24 Hour Behavior Analysis of a Peak-Shaving Equipment with Battery Storage. Energies 2019, 12, 2056. [Google Scholar] [CrossRef] [Green Version]
- Sant’ana, W.C.; Mollica, D.; Lambert-Torres, G.; Guimaraes, B.P.; Pinheiro, G.G.; Bonaldi, E.L.; Pereira, R.R.; Borges-Da-Silva, L.E.; Gonzatti, R.B.; Santana-Filho, J. 13.8 kV Operation of a Peak-Shaving Energy Storage Equipment With Voltage Harmonics Compensation Feature. IEEE Access 2020, 8, 182117–182132. [Google Scholar] [CrossRef]
- Phillips, C.L.; Nagle, H.T. Digital Control Systems Analysis and Design, 3rd ed.; Prentice Hall, Inc.: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Salomon, C.P.; Santana, W.C.; Bonaldi, E.L.; de Oliveira, L.E.L.; Borges da Silva, J.G.; Lambert-Torres, G.; Borges da Silva, L.E.; Pellicel, A.; Lopes, M.A.A.; Figueiredo, G.C. A system for turbogenerator predictive maintenance based on Electrical Signature Analysis. In Proceedings of the 2015 IEEE International Instrumentation and Measurement Technology Conference (I2MTC) Proceedings, Pisa, Italy, 11–14 May 2015; pp. 79–84. [Google Scholar] [CrossRef]
- Gama, B.R.; Sant’Ana, W.C.; Lambert-Torres, G.; Salomon, C.P.; Bonaldi, E.L.; Borges-Da-Silva, L.E.; Carvalho, R.B.B.; Steiner, F.M. FPGA Prototyping Using the STEMlab Board with Application on Frequency Response Analysis of Electric Machinery. IEEE Access 2021, 9, 26822–26838. [Google Scholar] [CrossRef]
- Sant’Ana, W.C.; Gama, B.R.; Lambert-Torres, G.; Bonaldi, E.L.; Oliveira, L.E.L.; Assuncao, F.O.; Arantes, D.A.; Areias, I.A.S.; Borges-Da-Silva, L.E.; Steiner, F.M. Development of a Modular Educational Kit for Research and Teaching on Power Electronics and Multilevel Converters. IEEE Access 2021, 9, 127496–127514. [Google Scholar] [CrossRef]
- Texas Instruments. SPRUI76A—Delfino TMS320F28379D Control CARD R1.3; Texas Instruments: Dallas, TX, USA, 2017. [Google Scholar]
- KRTKL Embedded Systems. Snickerdoodle User Guide; KRTKL Embedded Systems: San Francisco, CA, USA, 2016. [Google Scholar]
- Perisse, F.; Werynski, P.; Roger, D. A New Method for AC Machine Turn Insulation Diagnostic Based on High Frequency Resonances. IEEE Trans. Dielectr. Electr. Insul. 2007, 14, 1308–1315. [Google Scholar] [CrossRef]
- Madonna, V.; Giangrande, P.; Galea, M. Evaluation of strand-to-strand capacitance and dissipation factor in thermally aged enamelled coils for low-voltage electrical machines. IET Sci. Meas. Technol. 2019, 13, 1170–1177. [Google Scholar] [CrossRef]
- Vilas Boas, F.M.; Borges-da-Silva, L.E.; Villa-Nova, H.F.; Bonaldi, E.L.; Oliveira, L.E.L.; Lambert-Torres, G.; Assuncao, F.d.O.; Costa, C.I.d.A.; Campos, M.M.; Sant’Ana, W.C.; et al. Condition Monitoring of Internal Combustion Engines in Thermal Power Plants Based on Control Charts and Adapted Nelson Rules. Energies 2021, 14, 4924. [Google Scholar] [CrossRef]
- Brodecki, D.; Stano, E.; Andrychowicz, M.; Kaczmarek, P. EMC of Wideband Power Sources. Energies 2021, 14, 1457. [Google Scholar] [CrossRef]
- Asiminoaei, L.; Blaabjerg, F.; Hansen, S. Detection is key—Harmonic detection methods for active power filter applications. IEEE Ind. Appl. Mag. 2007, 13, 22–33. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| arm#1 () | arm#2 () | arm#3 () | arm#4 () |
|---|---|---|---|
| Parameter | Value |
|---|---|
| 5 kHz | |
| 0.60 | |
| 25.0 | |
| rad/s | |
| 15.0 | |
| rad/s | |
| 20.0 | |
| rad/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sant’Ana, W.C.; Lambert-Torres, G.; Bonaldi, E.L.; Gama, B.R.; Zacarias, T.G.; Areias, I.A.d.S.; Arantes, D.d.A.; Assuncao, F.d.O.; Campos, M.M.; Steiner, F.M. Online Frequency Response Analysis of Electric Machinery through an Active Coupling System Based on Power Electronics. Sensors 2021, 21, 8057. https://doi.org/10.3390/s21238057
Sant’Ana WC, Lambert-Torres G, Bonaldi EL, Gama BR, Zacarias TG, Areias IAdS, Arantes DdA, Assuncao FdO, Campos MM, Steiner FM. Online Frequency Response Analysis of Electric Machinery through an Active Coupling System Based on Power Electronics. Sensors. 2021; 21(23):8057. https://doi.org/10.3390/s21238057
Chicago/Turabian StyleSant’Ana, Wilson Cesar, Germano Lambert-Torres, Erik Leandro Bonaldi, Bruno Reno Gama, Tiago Goncalves Zacarias, Isac Antonio dos Santos Areias, Daniel de Almeida Arantes, Frederico de Oliveira Assuncao, Mateus Mendes Campos, and Fabio Monteiro Steiner. 2021. "Online Frequency Response Analysis of Electric Machinery through an Active Coupling System Based on Power Electronics" Sensors 21, no. 23: 8057. https://doi.org/10.3390/s21238057
APA StyleSant’Ana, W. C., Lambert-Torres, G., Bonaldi, E. L., Gama, B. R., Zacarias, T. G., Areias, I. A. d. S., Arantes, D. d. A., Assuncao, F. d. O., Campos, M. M., & Steiner, F. M. (2021). Online Frequency Response Analysis of Electric Machinery through an Active Coupling System Based on Power Electronics. Sensors, 21(23), 8057. https://doi.org/10.3390/s21238057