
High-Resolution and Large-Sensing-Range Liquid-Level Sensor Based on Optical Frequency Domain Reflectometry and No-Core Fiber

Abstract
:1. Introduction
2. Operational Principles and Experimental Design
2.1. Principles
2.2. Simulation Analysis
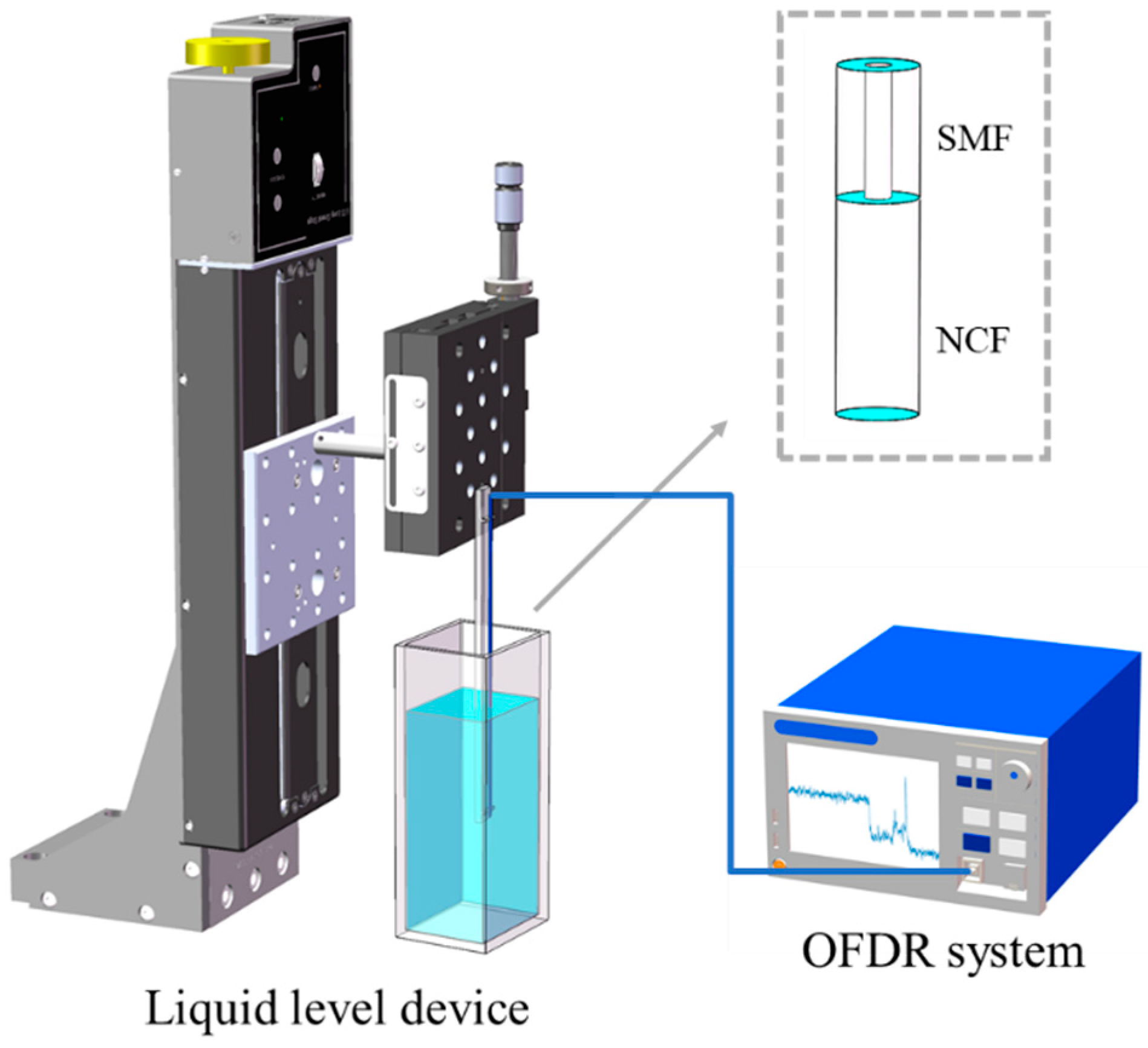
2.3. Experimental Design
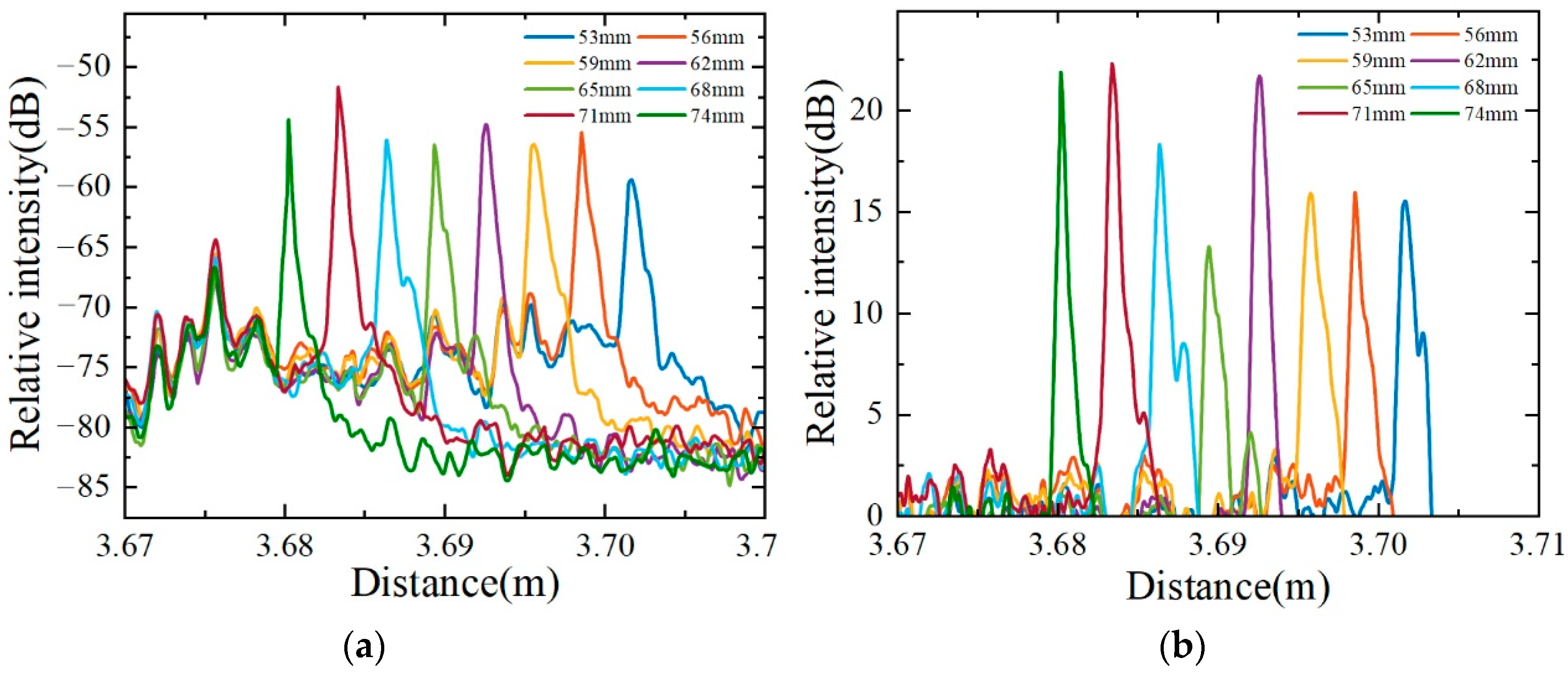
3. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Diaz, C.A.R.; Junior, A.L.; Marques, C.; Frizera, A.; Pontes, M.J.; Antunes, P.F.C.; Andre, P.S.B.; Ribeiro, M.R.N. Optical fiber sensing for sub-millimeter liquid-level monitoring: A review. IEEE Sens. J. 2019, 19, 7179–7191. [Google Scholar] [CrossRef]
- Li, P.; Cai, Y.; Shen, X.; Nabuzaale, S.; Yin, J.; Li, J. An accurate detection for dynamic liquid level based on MIMO ultrasonic transducer array. IEEE Trans. Instrum. Meas. 2014, 64, 582–595. [Google Scholar]
- Reverter, F.; Li, X.; Meijer, G.C.M. Liquid-level measurement system based on a remote grounded capacitive sensor. Sens. Actuators A 2007, 138, 1–8. [Google Scholar] [CrossRef]
- Kumar, B.; Rajita, G.; Mandal, N. A review on capacitive-type sensor for measurement of height of liquid level. Meas. Control 2014, 47, 219–224. [Google Scholar] [CrossRef]
- Zhu, C.; Zhuang, Y.Y.; Chen, Y.Z.; Huang, J. A liquid-level sensor based on a hollow coaxial cable fabry–perot resonator with micrometer resolution. IEEE Trans. Instrum. Meas. 2018, 67, 2892–2897. [Google Scholar] [CrossRef]
- Antonio-Lopez, J.E.; Sanchez-Mondragon, J.J.; LiKamWa, P.; May-Arrioja, D.A. Fiber-optic sensor for liquid level measurement. Opt. Lett. 2011, 36, 3425–3427. [Google Scholar] [CrossRef]
- Fuentes, O.; Del Villar, I.; Vento, J.R.; Socorro, A.B.; Gallego, E.E.; Corres, J.M.; Matias, I.R. Increasing the sensitivity of an optic level sensor with a wavelength and phase sensitive single-mode multimode single-mode fiber structure. IEEE Sens. J. 2017, 17, 5515–5522. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Ning, T.; Zhang, C.; Li, J.; Wen, X.; Pei, L.; Gao, X.; Lin, H. Liquid level measurement based on a no-core fiber with temperature compensation using a fiber Bragg grating. Sens. Actuators A 2016, 245, 49–53. [Google Scholar] [CrossRef]
- Yi, H.; Xu, J.; Li, W.; Wu, Y.; Li, K. The liquid level monitoring with sub-millimeter resolution by discrete wavelength sampling method. Sens. Actuators A 2018, 282, 237–242. [Google Scholar] [CrossRef]
- Zhang, F.; Li, S.; Yan, X.; Zhang, X.; Wang, F.; Suzuki, T.; Cheng, T. A refractive index sensitive liquid level monitoring sensor based on multimode interference. Photonics 2020, 7, 89. [Google Scholar] [CrossRef]
- Sun, M.; Jin, Y.; Dong, X. All-fiber Mach–Zehnder interferometer for liquid level measurement. IEEE Sens. J. 2015, 15, 3984–3988. [Google Scholar] [CrossRef]
- Wang, J.J.; Sun, Q.Z.; Li, Y.P.; Tan, S.J.; Yang, L.Y.; Fang, F.; Yan, Z.J.; Liu, D.M. Highly sensitive liquid-level sensor based on an optical reflective microfiber probe. Opt. Lett. 2020, 45, 169–172. [Google Scholar] [CrossRef]
- Li, Y.; Song, Z.; Pan, J.; Lu, H.; Hu, J. In-line reflected fiber sensor for simultaneous measurement of temperature and liquid level based on tapered few-mode fiber. Opt. Express 2022, 30, 7870–7882. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Ling, F.; Kumar, R.; Mallik, A.K.; Tian, K.; Shen, C.; Semenova, G.F.Y.; Wu, Q.; Wang, P. Sub-micrometer resolution liquid level sensor based on a hollow core fiber structure. Opt. Lett. 2019, 44, 2125–2128. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Li, W.; Wu, Q.; Zhao, H.; Ling, F.; Tian, K.; Wang, P. High sensitivity liquid level sensor for microfluidic applications using a hollow core fiber structure. Sens. Actuators A 2021, 332, 113134. [Google Scholar] [CrossRef]
- Martins, J.; Diaz, C.A.R.; Domingues, M.F.; Ferreira, R.A.S.; Antunes, P.; André, P.S. Low-cost and high-performance optical fiber-based sensor for liquid level monitoring. IEEE Sens. J. 2019, 19, 4882–4888. [Google Scholar] [CrossRef]
- Chang, H.Y.; Chang, Y.C.; Sheng, H.J.; Fu, M.Y.; Liu, W.F.; Kashyap, R. An ultra-sensitive liquid-level indicator based on an etched chirped-fiber Bragg grating. IEEE Photonics Technol. Lett. 2016, 28, 268–271. [Google Scholar] [CrossRef]
- Oliveira, R.; Aristilde, S.; Osório, J.H.; Franco, M.A.R.; Bilro, L.; Nogueira, R.N.; Cordeiro, C.M.B. Intensity liquid level sensor based on multimode interference and fiber Bragg grating. Meas. Sci. Technol. 2016, 27, 125104. [Google Scholar] [CrossRef]
- Fu, H.; Shu, X.; Zhang, A.; Liu, W.; Zhang, L.; He, S.; Bennion, I. Implementation and characterization of liquid-level sensor based on a long-period fiber grating Mach–Zehnder interferometer. IEEE Sens. J. 2011, 11, 2878–2882. [Google Scholar] [CrossRef]
- Pan, Z.; Huang, Y.; Xiao, H. Multi-parameter sensing device to detect liquid layers using long-period fiber gratings. Sensors 2018, 18, 3094. [Google Scholar] [CrossRef] [Green Version]
- Petrie, C.M.; Mcduffee, J.L. Liquid level sensing for harsh environment applications using distributed fiber optic temperature measurements. Sens. Actuators A 2018, 282, 114–123. [Google Scholar] [CrossRef]
- Zhang, H.Y.; Cheng, Y.F.; Wu, K.J.; Yuan, Z.J.; Dong, Y.K. Liquid-level sensing method based on differential pulse-width pair Brillouin optical time-domain analysis and a self-heated high attenuation fiber. Appl. Opt. 2020, 59, 795–799. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Xue, Z.P.; Jin, B.Q.; Wang, Y.; Zhang, Y.; Zhang, M.J. Chaotic correlation optical fiber liquid level sensor. J. Lightwave Technol. 2018, 37, 1023–1028. [Google Scholar] [CrossRef]
- Liu, Q.; Liu, T.; He, T.; Li, H.; Yan, Z.; Zhang, L.; Sun, Q. High resolution and large sensing range liquid level measurement using phase-sensitive optic distributed sensor. Opt. Express 2021, 29, 11538–11547. [Google Scholar] [CrossRef] [PubMed]
- Yin, G.; Jiang, R.; Zhu, T. In-fiber auxiliary interferometer to compensate laser nonlinear tuning in simplified OFDR. J. Lightwave Technol. 2021, 40, 837–843. [Google Scholar] [CrossRef]
- Yüksel, K.; Wuilpart, M.; Mégret, P. Analysis and suppression of nonlinear frequency modulation in an optical frequency-domain reflectometer. Opt. Express 2009, 17, 5845–5851. [Google Scholar] [CrossRef] [Green Version]
- Yin, G.; Lu, L.; Zhou, L.; Shao, C.; Fu, Q.; Zhang, J.; Zhu, T. Distributed directional torsion sensing based on an optical frequency domain reflectometer and a helical multicore fiber. Opt. Express 2020, 28, 16140–16150. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Resolution (mm) | Sensing Range (mm) |
|---|---|---|
| Hollow core fiber [14] | 7 × 10−4 | 4.7 |
| NCF and FBG [8] | 0.46 | 45 |
| Reflective microfiber probe [12] | 0.01 | 0.5 |
| SMF-NCF-SMF [9] | 0.5 | 500 |
| OFDR and heater wire [21] | 5 | 220 |
| BOTDA and self-heated high attenuation fiber [22] | 10 | 200 |
| φ-OTDR and thermal optic effect with cylinder [24] | 0.142 | 200 |
| This work | 0.1 | 12,500 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, G.; Yang, P.; Xiao, H.; Wang, Y.; Zhang, Z.; Yan, F.; Zhu, T. High-Resolution and Large-Sensing-Range Liquid-Level Sensor Based on Optical Frequency Domain Reflectometry and No-Core Fiber. Sensors 2022, 22, 4480. https://doi.org/10.3390/s22124480
Yin G, Yang P, Xiao H, Wang Y, Zhang Z, Yan F, Zhu T. High-Resolution and Large-Sensing-Range Liquid-Level Sensor Based on Optical Frequency Domain Reflectometry and No-Core Fiber. Sensors. 2022; 22(12):4480. https://doi.org/10.3390/s22124480
Chicago/Turabian StyleYin, Guolu, Pengxi Yang, Hu Xiao, Yu Wang, Zeheng Zhang, Fabing Yan, and Tao Zhu. 2022. "High-Resolution and Large-Sensing-Range Liquid-Level Sensor Based on Optical Frequency Domain Reflectometry and No-Core Fiber" Sensors 22, no. 12: 4480. https://doi.org/10.3390/s22124480