
Modeling of the Influence of Operational Parameters on Tire Lateral Dynamics

 ,
,  , , and
, , and
Abstract
:1. Introduction
- Lateral dynamics are much more stable: it is much easier to control lateral slip than longitudinal slip. This allows for much better repeatability of tests.
- The generation of lateral forces generates a temperature gradient across the tread that the longitudinal force does not. This allows for studying the influence of temperature distribution along the tread.
- The tire test bench at the research group’s facilities cannot impose one speed on the wheel and another on the running belt. Only braking of the wheel is possible. This results in two outcomes. First, the tests requiring longitudinal slippage must be brief, as the brake disc heats up very quickly. Secondly, once the slip corresponding to maximum grip has been reached, the tire locks up almost instantaneously, making it very difficult to work in the non-linear zone of the tire. In addition, measuring angular velocity of the wheels in situations close to lock-up and, therefore, measuring high slip is quite complex in a vehicle not instrumented for this purpose [41].
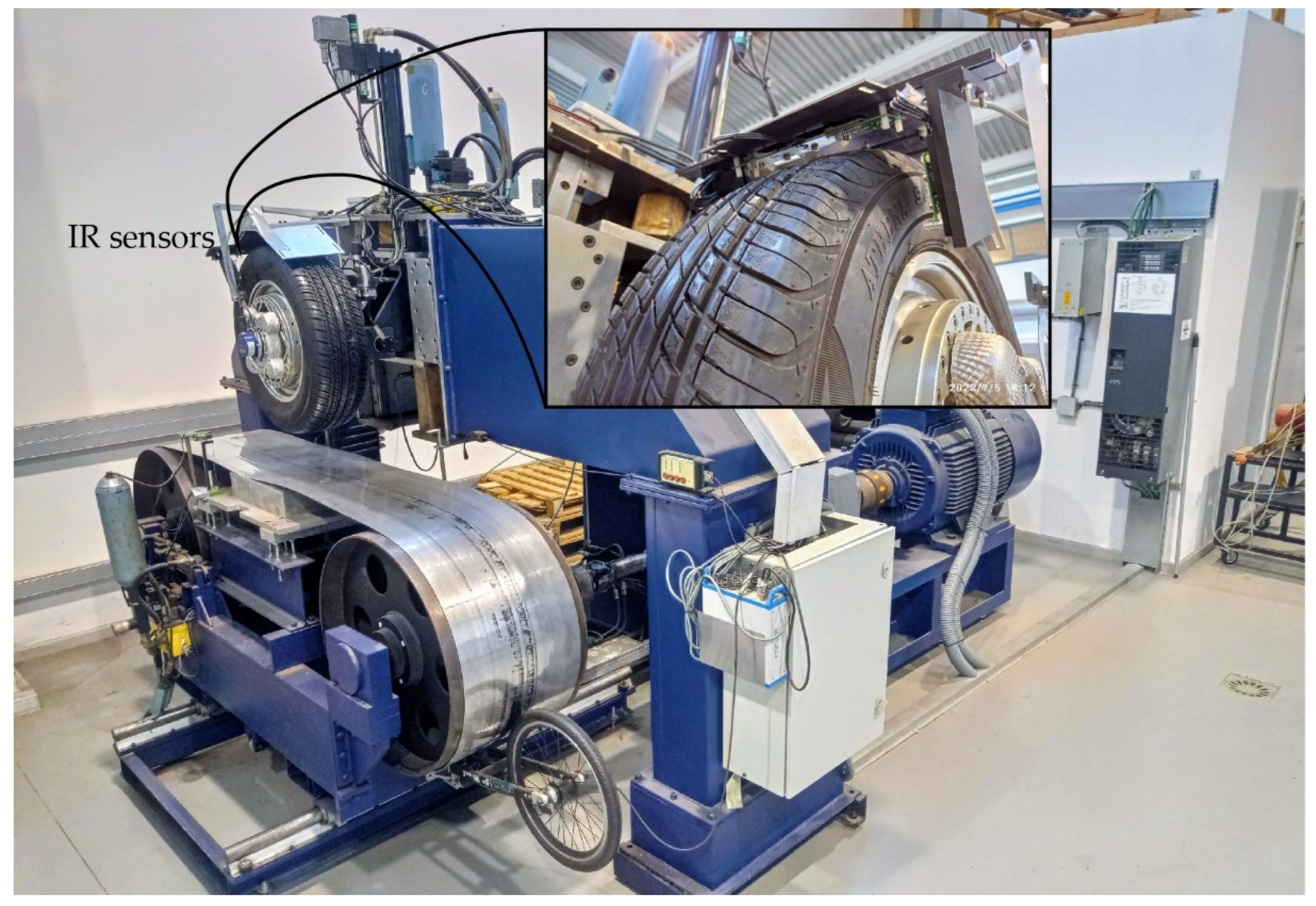
- Designing, coding, and assembling the temperature measuring device using IR sensors to determine temperature distribution of the tire.
- Performing a number of tests to determine the influence of various parameters on the generation of contact forces.
- Analyzing and proposing a novel model to estimate the parameters of interest in the tire.
- It is the most easily measurable temperature and the most relevant to generation of contact forces.
- An accurate and inexpensive temperature distribution can be obtained using an infrared sensor, given that the emissivity of dry rubber is known and approximately constant.
- Only tire sidewall temperature is considered for estimating carcass temperature.
- The contributions of the present work are:
- Proposing a model for determining a representative temperature as a function of the temperature of the whole tire.
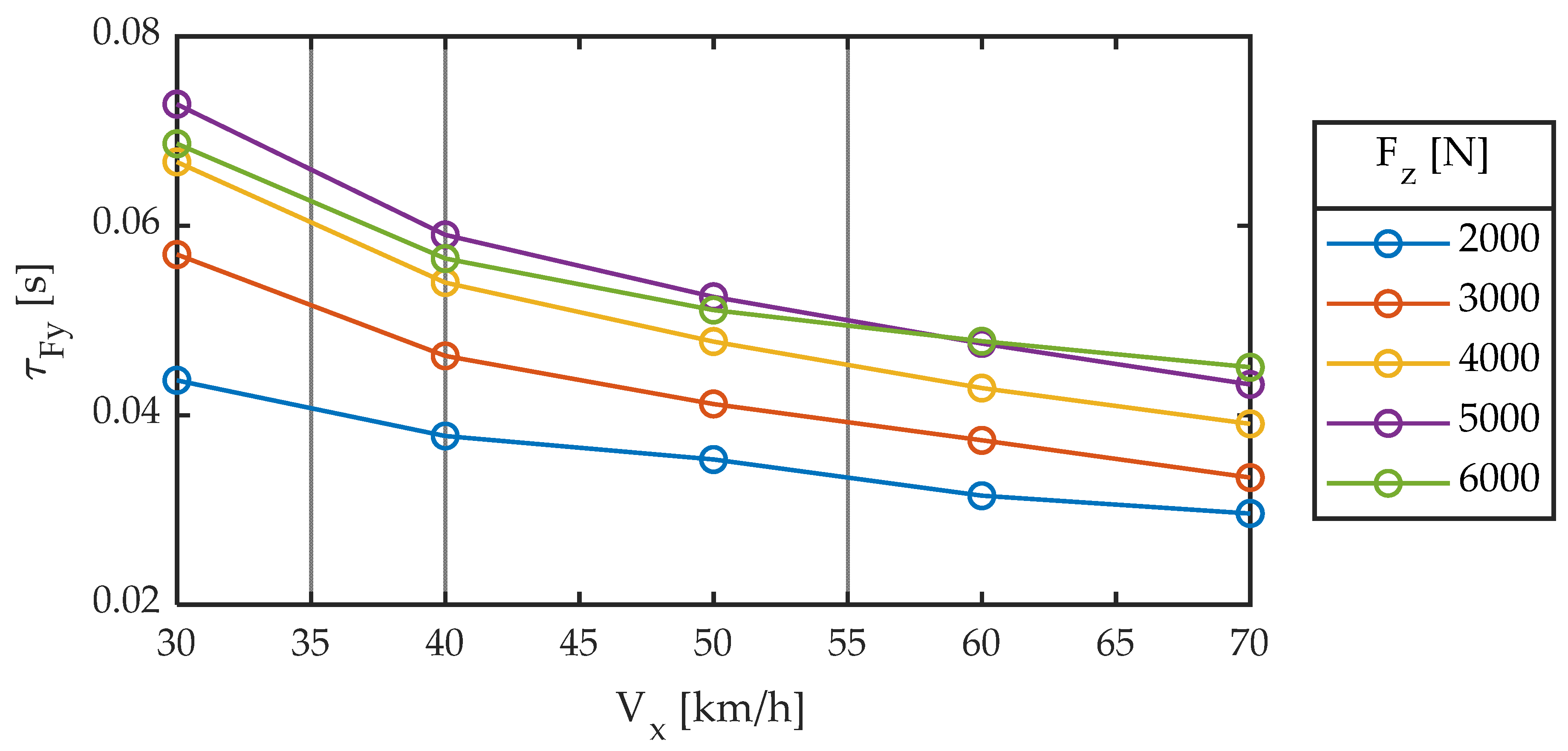
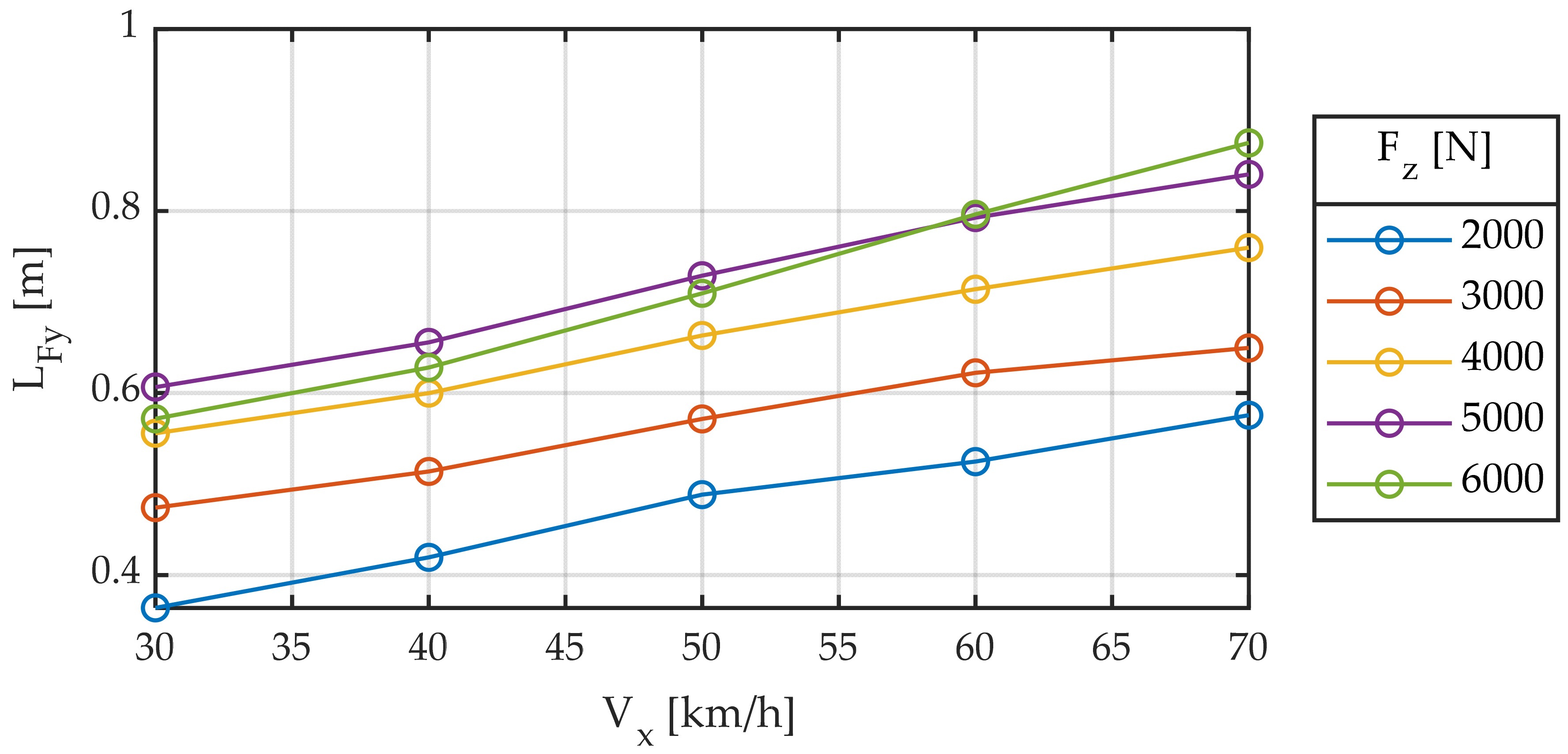
- Proposing a model for estimating relaxation length as a function of vertical load and linear speed of the vehicle.
- Proposing a model to determine the maximum friction coefficient as a function of the representative tire temperature.
- Ensuring a reduced computational cost to evaluate these models while maintaining a reduced number of tests needed to characterize them.
2. Materials and Methods
- Relaxation length for the generation of Fy: LFy;
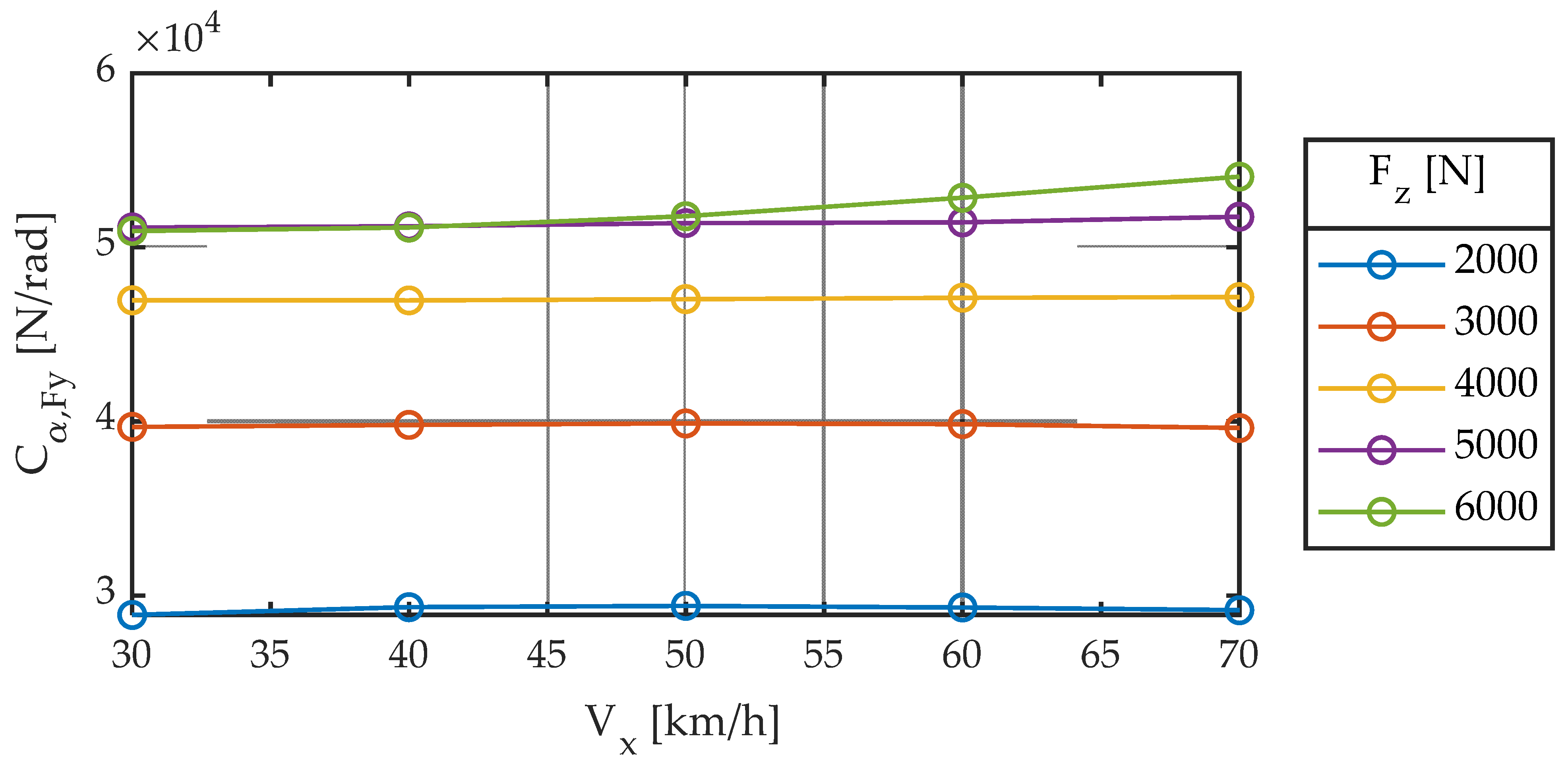
- Cornering stiffness: Cα,Fy.
- Vertical load: Fz;
- Longitudinal speed: Vx;
- Tire pressure: P;
- Tire temperature: T;
- Slip angle excitation frequency: fSA.
2.1. Linear Tests
- Vertical load, 4000 N;
- Longitudinal speed, 60 km/h (16.7 m/s);
- Tire pressure, 2.3 bar;
- Tire temperature, 60 °C;
- Slip angle excitation frequency, 1 Hz;
- Slip angle excitation amplitude, 2°.
2.1.1. First Group of Tests: Influence of Fz and Vx
2.1.2. Second Group of Tests: Influence of Slip Angle Excitation Frequency
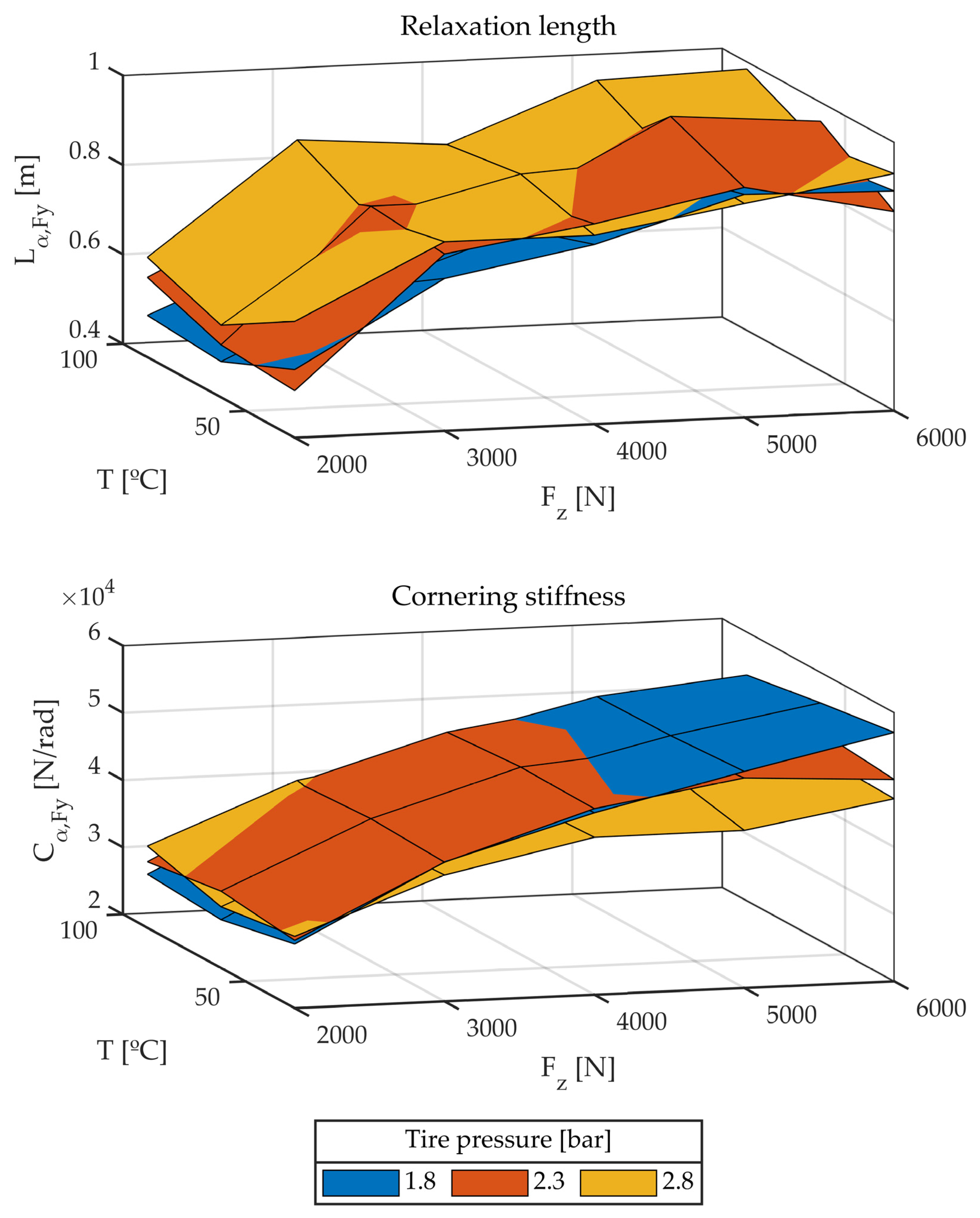
2.1.3. Third Group of Tests: Influence of Temperature and Pressure
2.2. Non-Linear Tests
- Taking a representative temperature value (scalar) from the reading of the nine sensors. The following Equation (3) is proposed:where wi is the weight corresponding to the reading of each sensor. The expression to calculate it is (4):
- 2.
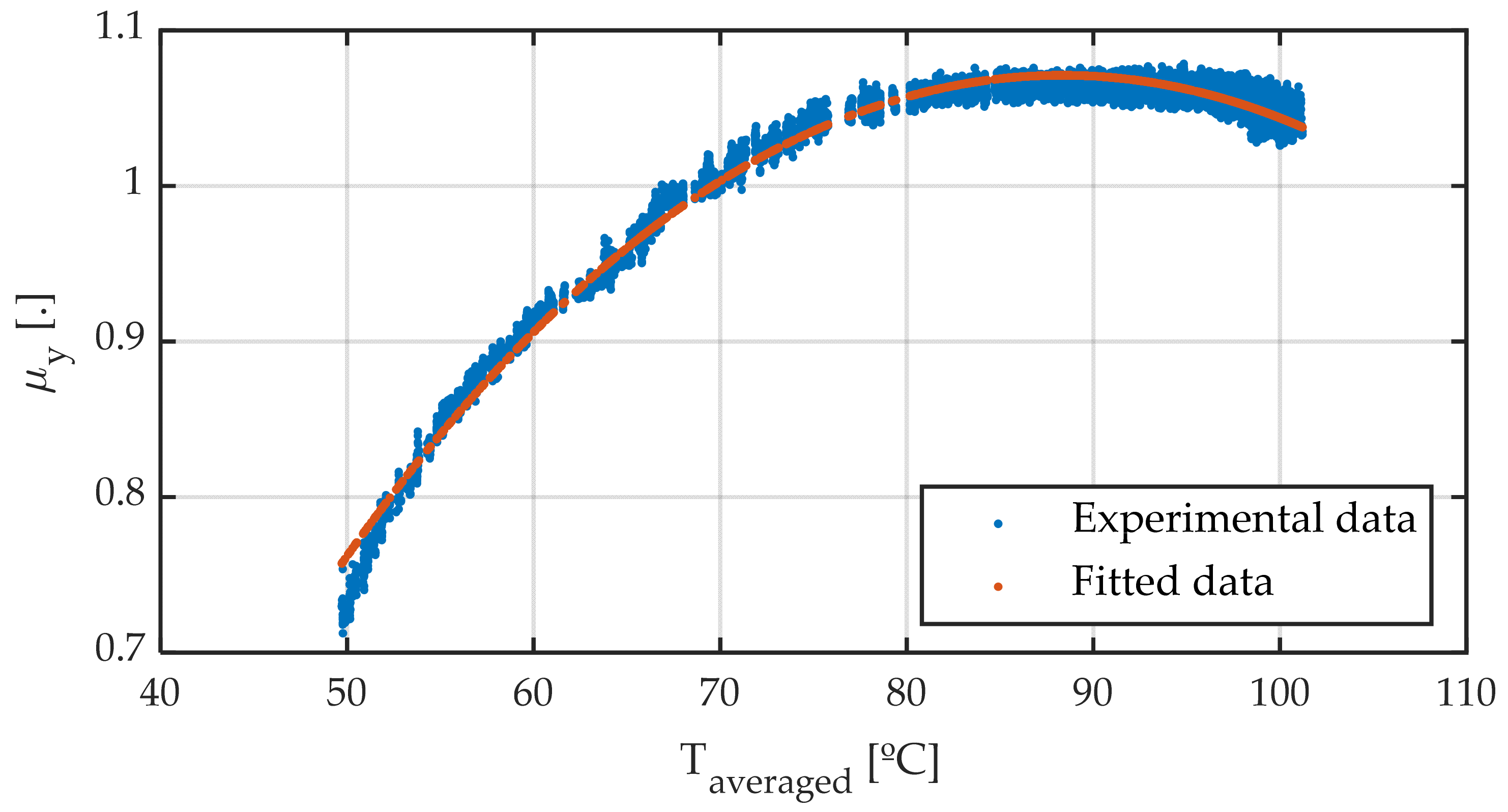
- Proposing a model to determine the grip as a function of temperature. In this case, an expression using a hyperbolic cosine is proposed, which will be described in more detail in the Results section.
3. Results and Discussion
3.1. Linear Tests
3.1.1. First Group of Tests: Influence of Fz and Vx
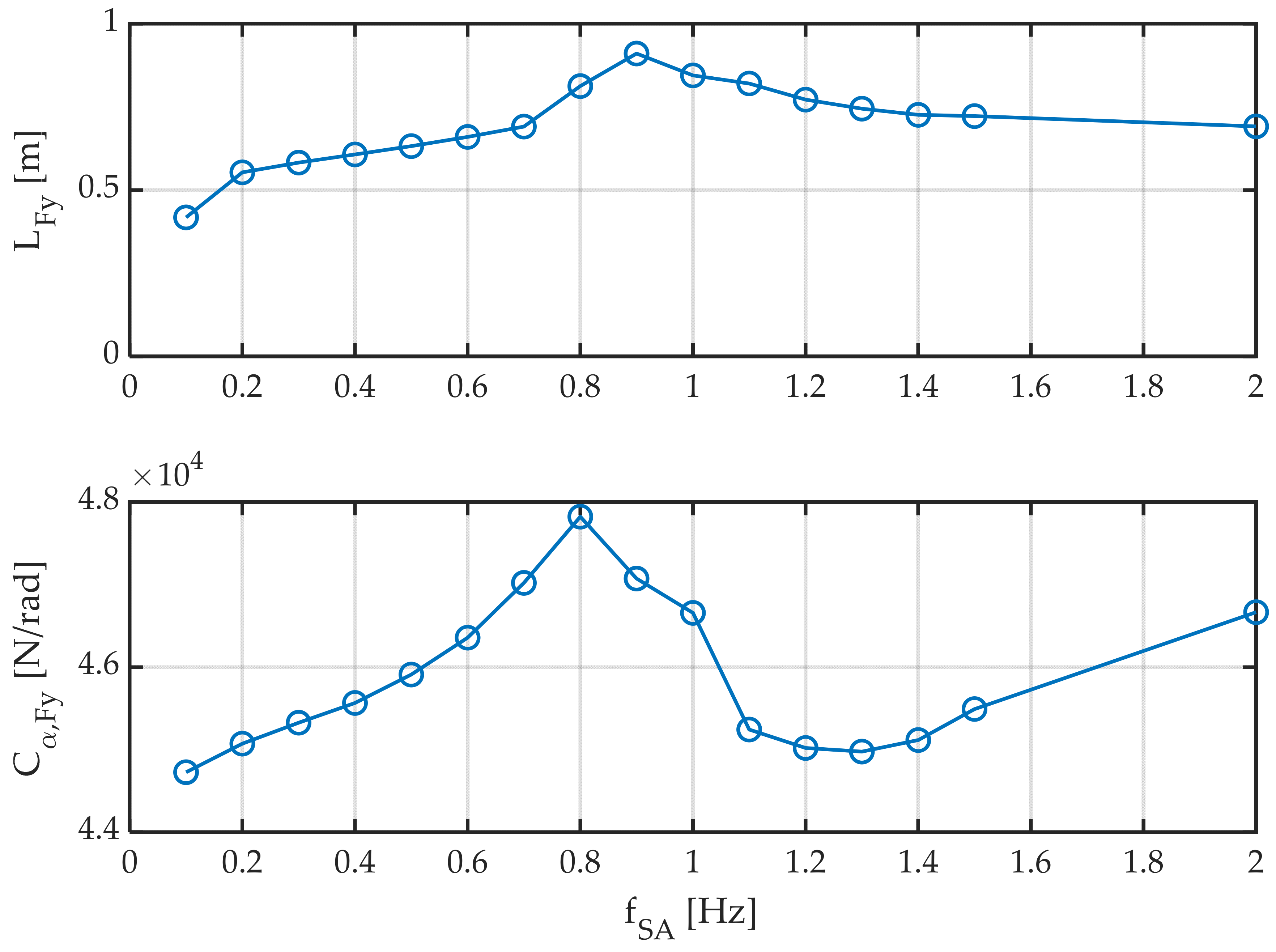
3.1.2. Second Group of Tests: Influence of Slip Angle Excitation Frequency
- The relaxation length increases from almost zero frequencies (<0.5 m) to a maximum at around 1 Hz, where it almost doubles its value (~1.0 m).
- The stiffness also has a maximum value of around 1 Hz, but these values vary much less in percentage terms, around 5%.
3.1.3. Third Group of Tests: Influence of Temperature and Pressure
3.2. Non-Linear Tests
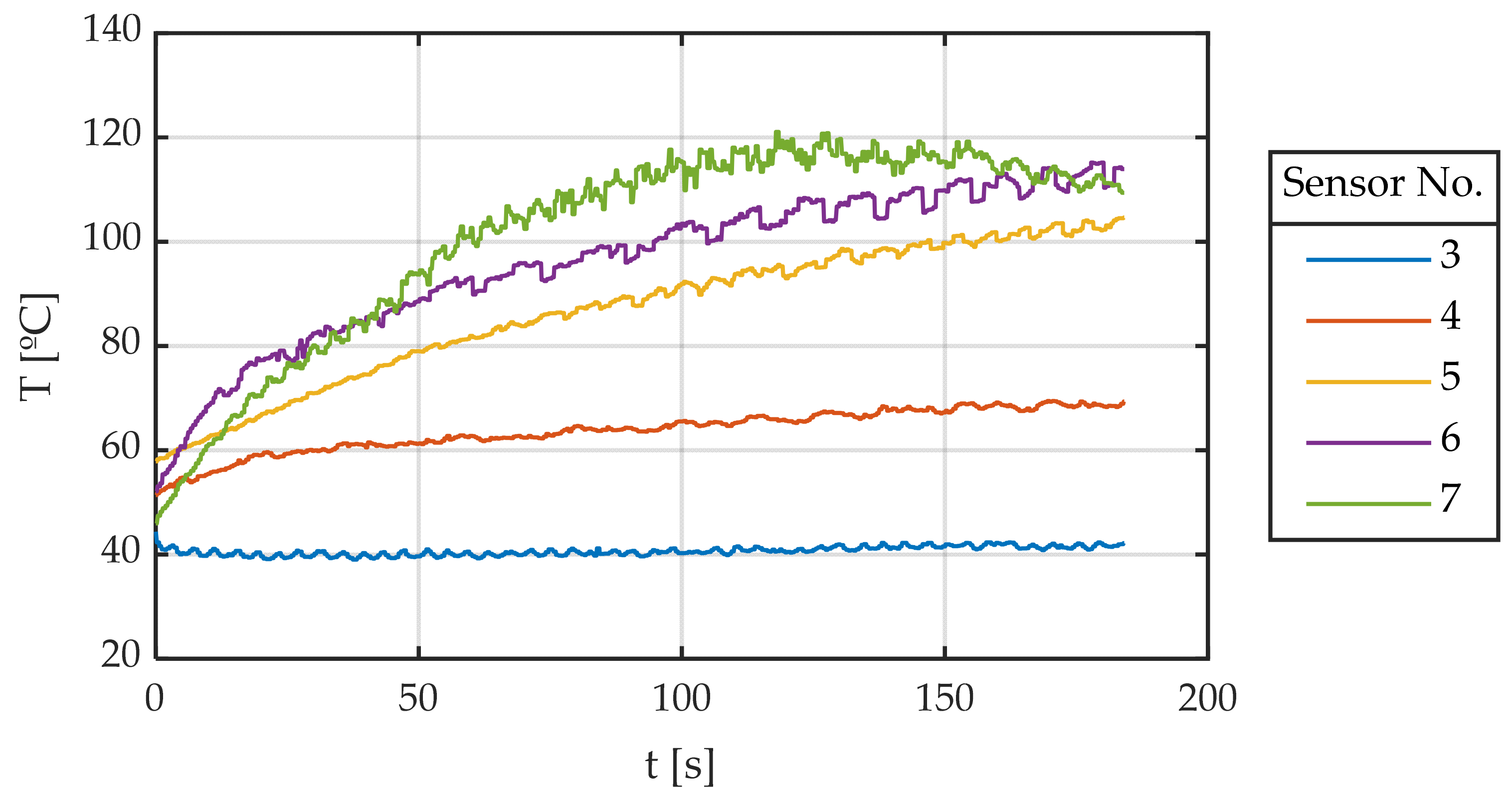
- The tread area sensors that barely work (3 and 4) show how tire temperature slightly increases, reaching a stationary value relatively quickly.
- Sensors positioned in the tread area that contribute strongly to lateral force generation (sensors 5–7) show how the temperature in this area increases approximately linearly over time for sensors 5 and 6, while for sensor 7, it increases until it reaches a maximum around 120 °C and then it cools down slightly.
- If the temperature behavior of sensor 7 is analyzed, this maximum can be interpreted as follows. Since the friction coefficient increases with temperature up to a reference or optimum temperature and then decreases, this tire area generates less friction when this temperature is exceeded. As it generates less friction, it heats up less and cools down. It would be expected that, when it cools down, it would generate more friction and heat up again. What happens is that the area of the nearest sensors (5 and 6) has already exceeded 100 °C, so the total friction and heat generation decreases. As it can be seen in Figure 15, after approximately 100 s of testing, total friction decreases slightly. This moment occurs at the same time as the hardest working zones (5–7) exceed 100 °C. Consequently, the previously described Equation (3) is proposed to be used to provide a single value that represents the measurements of all the temperature sensors.
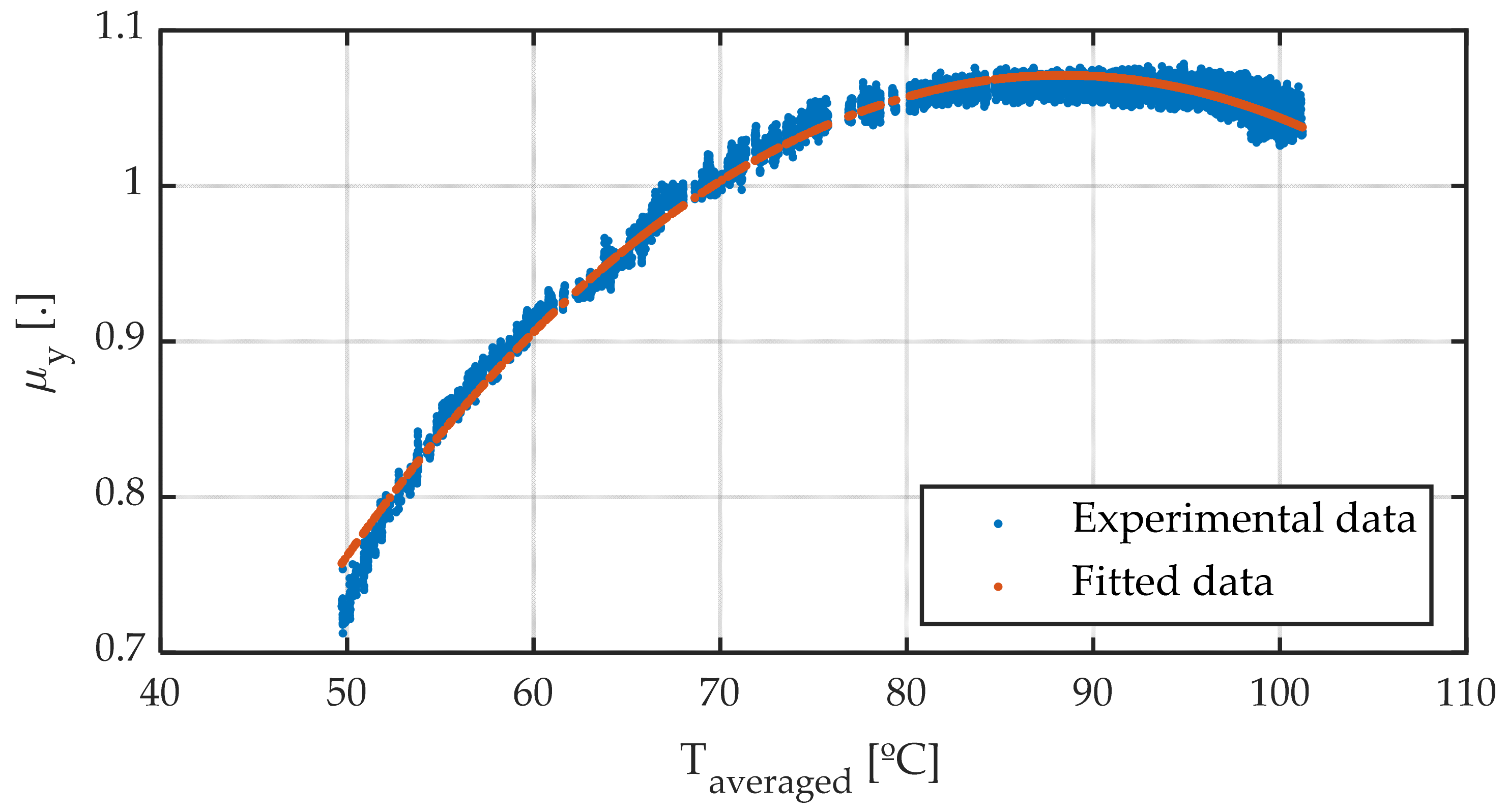
- The friction coefficient varies enormously with temperature. It starts at about a value of 0.7 and rises to a maximum of 1.05, representing an increase of 50%. This is one of the reasons for studying the influence of temperature on tire grip.
- The friction coefficient shows a maximum (not very sharp), then it decreases slowly.
4. Conclusions and Future Works
- A new polynomial model is proposed to determine lateral relaxation length as a function of tire vertical load and longitudinal vehicle speed. It can be evaluated in real-time due to its low computational cost.
- A method is described to obtain a single representative temperature of the entire tread from an inhomogeneous distribution measured with infrared sensors. This method is based on Newton’s law of cooling, which is the fundamental heat dissipation mechanism of tires. In addition, the computational cost of determining this averaged temperature is relatively low.
- A new mathematical model to determine the maximum lateral friction coefficient as a function of representative temperature calculated according to the proposed method and its implementation into the MF set of equations.
- It has been indicated how some variables do not influence some of the parameters that characterize lateral dynamics so that they can be obviated for predictive control.
- Future work will include the following:
- Performing the same tests on different rolling surfaces: different belts on the tire test bench and especially real roads with an instrumented vehicle.
- Performing tests with different tires to determine the influence of other parameters, such as aspect ratio, tread width, etc.
- Carrying out longitudinal tests in order to be able to elaborate more complex combined models later.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Choi, E.H. Tire-Related Factors in the Pre-Crash Phase; NHTSA: Washington, DC, USA, 2012.
- Reina, G.; Gentile, A.; Messina, A. Tyre Pressure Monitoring Using a Dynamical Model-Based Estimator. Veh. Syst. Dyn. 2015, 53, 568–586. [Google Scholar] [CrossRef]
- Pacejka, H.B. Tire and Vehicle Dynamics, 3rd ed.; Elsevier Ltd.: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Bakker, E.; Nyborg, L.; Pacejka, H.B. Tyre Modelling for Use in Vehicle Dynamics Studies. SAE Tech. Pap. Ser. 1987, 190–204. [Google Scholar] [CrossRef]
- Mizuno, M.; Sakai, H.; Oyama, K.; Isomura, Y. Development of a Tyre Force Model Incorporating the Influence of the Tyre Surface Temperature. Veh. Syst. Dyn. 2005, 43, 395–402. [Google Scholar] [CrossRef]
- Sorniotti, A.; Velardocchia, M. Enhanced Tire Brush Model for Vehicle Dynamics Simulation. SAE Tech. Pap. 2008. [Google Scholar] [CrossRef]
- Sakhnevych, A. Multiphysical MF-Based Tyre Modelling and Parametrisation for Vehicle Setup and Control Strategies Optimisation. Veh. Syst. Dyn. 2021, 1–22. [Google Scholar] [CrossRef]
- Farroni, F.; Sakhnevych, A. Tire Multiphysical Modeling for the Analysis of Thermal and Wear Sensitivity on Vehicle Objective Dynamics and Racing Performances. Simul. Model. Pract. Theory 2022, 117, 102517. [Google Scholar] [CrossRef]
- Kelly, D.P.; Sharp, R.S. Time-Optimal Control of the Race Car: Influence of a Thermodynamic Tyre Model. Veh. Syst. Dyn. 2012, 50, 641–662. [Google Scholar] [CrossRef]
- Harsh, D.; Shyrokau, B. Tire Model with Temperature Effects for Formula SAE Vehicle. Appl. Sci. 2019, 9, 5328. [Google Scholar] [CrossRef]
- Ozerem, O.; Morrey, D. A Brush-Based Thermo-Physical Tyre Model and Its Effectiveness in Handling Simulation of a Formula SAE Vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 107–120. [Google Scholar] [CrossRef]
- Calabrese, F.; Baecker, M.; Galbally, C.; Gallrein, A. A Detailed Thermo-Mechanical Tire Model for Advanced Handling Applications. SAE Int. J. Passeng. Cars Mech. Syst. 2015, 8, 501–511. [Google Scholar] [CrossRef]
- Calabrese, F.; Ludwig, C.; Bäcker, M.; Gallrein, A. A Study of Parameter Identification for a Thermal-Mechanical Tire Model Based on Flat Track Measurements. In The Dynamics of Vehicles on Roads and Tracks; CRC Press: Boca Raton, FL, USA, 2017; pp. 169–175. ISBN 9781351057264. [Google Scholar]
- Cabrera, J.A.; Castillo, J.J.; Pérez, J.; Velasco, J.M.; Guerra, A.J.; Hernández, P. A Procedure for Determining Tire-Road Friction Characteristics Using a Modification of the Magic Formula Based on Experimental Results. Sensors 2018, 18, 896. [Google Scholar] [CrossRef] [PubMed]
- Romano, L.; Sakhnevych, A.; Strano, S.; Timpone, F. A Novel Brush-Model with Flexible Carcass for Transient Interactions. Meccanica 2019, 54, 1663–1679. [Google Scholar] [CrossRef]
- Romano, L.; Bruzelius, F.; Jacobson, B. Unsteady-State Brush Theory. Veh. Syst. Dyn. 2021, 59, 1643–1671. [Google Scholar] [CrossRef]
- Romano, L. Advanced Brush Tyre Modeling; Springer: Berlin/Heidelberg, Germany, 2022; ISBN 9783030984342. [Google Scholar]
- Ma, Y.; Lu, D.; Yin, H.; Li, L.; Lv, M.; Wang, W. The Unsteady-State Response of Tires to Slip Angle and Vertical Load Variations. Machines 2022, 10, 527. [Google Scholar] [CrossRef]
- Wang, Y.; Wei, Y.; Feng, X.; Yao, Z. Finite Element Analysis of the Thermal Characteristics and Parametric Study of Steady Rolling Tires. Tire Sci. Technol. 2012, 40, 201–218. [Google Scholar] [CrossRef]
- Ebbott, T.G.; Hohman, R.L.; Jeusette, J.P.; Kerchman, V. Tire Temperature and Rolling Resistance Prediction with Finite Element Analysis. Tire Sci. Technol. 1999, 27, 2–21. [Google Scholar] [CrossRef]
- Studios, S.M. Handling Consultants Feedback Reports. Available online: https://wmdportal.com/ (accessed on 9 June 2022).
- Durand-Gasselin, B.; Dailliez, T.; Mossner-Beigel, M.; Knorr, S.; Rauh, J. Assessing the Thermo-Mechanical TaMeTirE Model in Offline Vehicle Simulation and Driving Simulator Tests. Veh. Syst. Dyn. 2010, 48, 211–229. [Google Scholar] [CrossRef]
- Grob, M.; Blanco-Hague, O.; Spetler, F. Tametire’s Testing Procedure Outside Michelin. In Proceedings of the 4th International Tyre Colloquium, Guildford, UK, 20–21 April 2015. [Google Scholar]
- Fevrier, P.; Fandard, G. Thermal and Mechanical Tyre Modelling. ATZ Worldw. 2008, 110, 26–31. [Google Scholar] [CrossRef]
- Gipser, M. FTire and Puzzling Tyre Physics: Teacher, Not Student. Veh. Syst. Dyn. 2016, 54, 113–127. [Google Scholar] [CrossRef]
- Hofmann, G.; Gipser, M. FTire-Flexible Structure Tire Model; Cosin Scientific Software: Munich, Germany, 2017; p. 64. [Google Scholar]
- Kaemer, D. Physics Modeling NTM V7. Available online: https://www.iracing.com/physics-modeling-ntm-v7-info-plus/ (accessed on 9 June 2022).
- Ward, I.M.; Sweeney, J. Mechanical Properties of Solid Polymers, 3rd ed.; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2013; ISBN 9781444319507. [Google Scholar]
- Société de Technologie Michelin. The Tyre Encyclopaedia. Part 1: Grip; 2001. Available online: http://docenti.ing.unipi.it/guiggiani-m/dinvei.html (accessed on 9 June 2022).
- Williams, M.L.; Landel, R.F.; Ferry, J.D. The Temperature Dependence of Relaxation Mechanisms in Amorphous Polymers and Other Glass-Forming Liquids. J. Am. Chem. Soc. 1955, 77, 3701–3707. [Google Scholar] [CrossRef]
- Lozia, Z. Is the Representation of Transient States of Tyres a Matter of Practical Importance in the Simulations of Vehicle Motion. Arch. Automot. Eng. 2017, 77, 63–84. [Google Scholar]
- Segel, L. Force and Moment Response of Pneumatic Tires to Lateral Motion Inputs. J. Manuf. Sci. Eng. Trans. ASME 1966, 88, 37–44. [Google Scholar] [CrossRef]
- Dugoff, H.; Fancher, P.S.; Segel, L. An Analysis of Tire Traction Properties and Their Influence on Vehicle Dynamic Performance. SAE Tech. Pap. 1970, 79, 1219–1243. [Google Scholar] [CrossRef]
- Schieschke, R.; Hiemenz, R. The Relevance of Tire Dynamics in Vehicle Simulation. In Proceedings of the XXIII FISITA Congress, Torino, Italy, 7–11 May 1990. [Google Scholar]
- Schieschke, R. The Importance of Tire Dynamics in Vehicle Simulation. In Proceedings of the 9th Annual Meeting and Conference on Tire Science and Technology, Tire Science and Technology, Akron, OH, USA, 20–21 March 1990. [Google Scholar]
- Oertel, C.; Fandre, A. RMOD-K Tyre Model System. ATZ Worldw. 2001, 103, 23–25. [Google Scholar] [CrossRef]
- Oertel, C.; Fandre, A. Tire Model RMOD-K 7 and Misuse Load Cases. SAE Tech. Pap. 2009. [Google Scholar] [CrossRef]
- Luty, W. Influence of the Tire Relaxation on the Simulation Results of the Vehicle Lateral Dynamics in Aspect of the Vehicle Driving Safety. J. KONES Powertrain Transp. 2015, 22, 185–192. [Google Scholar] [CrossRef]
- Luty, W. Simulation Research of the Tire Basic Relaxation Model in Conditions of the Wheel Cornering Angle Oscillations. IOP Conf. Ser. Mater. Sci. Eng. 2016, 148, 012015. [Google Scholar] [CrossRef]
- Shaju, A.; Kumar Pandey, A. Modelling Transient Response Using PAC 2002-Based Tyre Model. Veh. Syst. Dyn. 2022, 60, 20–46. [Google Scholar] [CrossRef]
- Alcázar Vargas, M.; Pérez Fernández, J.; Velasco García, J.M.; Cabrera Carrillo, J.A.; Castillo Aguilar, J.J. A Novel Method for Determining Angular Speed and Acceleration Using Sin-Cos Encoders. Sensors 2021, 21, 577. [Google Scholar] [CrossRef]
- Ljung, L. System Identification Toolbox User’s Guide; The Mathworks: Natick, MA, USA, 2022. [Google Scholar]
- Cabrera, J.A.; Ortíz, A.; Simón, A.; García, F.; Pérez de la Blanca, A. A Versatile Flat Track Tire Testing Machine. Veh. Syst. Dyn. 2003, 40, 271–284. [Google Scholar] [CrossRef]
- De Rosa, R.; di Stazio, F.; Giordano, D.; Russo, M.; Terzo, M. ThermoTyre: Tyre Temperature Distribution during Handling Manoeuvres. Veh. Syst. Dyn. 2008, 46, 831–844. [Google Scholar] [CrossRef]
- D’Errico, J. Polyfitn. Available online: https://es.mathworks.com/matlabcentral/fileexchange/34765-polyfitn (accessed on 28 June 2022).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fy | Fz | |
|---|---|---|
| Range [N] | ±8000 | ±15,000 |
| Linearity [% FS] | 0.4 | 0.1 |
| Hysteresis [% FS] | 0.4 | 0.2 |
| Sample rate [Hz] | 5000 | 5000 |
| Variable | Value | Units |
|---|---|---|
| c1 | −1.4 × 10−1 | m |
| c2 | +2.1 × 10−2 | s |
| c3 | +1.9 × 10−4 | m·N−1 |
| c4 | −1.6 × 10−8 | m·N−2 |
| Variable | Value | Units |
|---|---|---|
| d1 | +5.2 × 104 | N/rad |
| d2 | +2.7 × 100 | - |
| d3 | +1.1 × 10−4 | N−1 |
| Variable | Value | Units |
|---|---|---|
| +1.1 × 100 | - | |
| Tdispersion | +5.0 × 101 | °C |
| Topt | +8.8 × 101 | °C |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alcázar Vargas, M.; Pérez Fernández, J.; Sánchez Andrades, I.; Cabrera Carrillo, J.A.; Castillo Aguilar, J.J. Modeling of the Influence of Operational Parameters on Tire Lateral Dynamics. Sensors 2022, 22, 6380. https://doi.org/10.3390/s22176380
Alcázar Vargas M, Pérez Fernández J, Sánchez Andrades I, Cabrera Carrillo JA, Castillo Aguilar JJ. Modeling of the Influence of Operational Parameters on Tire Lateral Dynamics. Sensors. 2022; 22(17):6380. https://doi.org/10.3390/s22176380
Chicago/Turabian StyleAlcázar Vargas, Manuel, Javier Pérez Fernández, Ignacio Sánchez Andrades, Juan A. Cabrera Carrillo, and Juan J. Castillo Aguilar. 2022. "Modeling of the Influence of Operational Parameters on Tire Lateral Dynamics" Sensors 22, no. 17: 6380. https://doi.org/10.3390/s22176380