
The Atmospheric Vertical Detection of Large Area Regions Based on Interference Signal Denoising of Weighted Adaptive Kalman Filter
 , ,
, ,
Abstract
:1. Introduction
2. KF for Interference Signal Noise Attenuation
2.1. Experimental Setup and Measurement Solutions
2.2. State-Space Model for Interference Signal
2.3. KF for Interference Signal Noise Attenuation
3. Wakf for Interference Signal Noise Attenuation
4. Results
4.1. Interference Signal Denoising
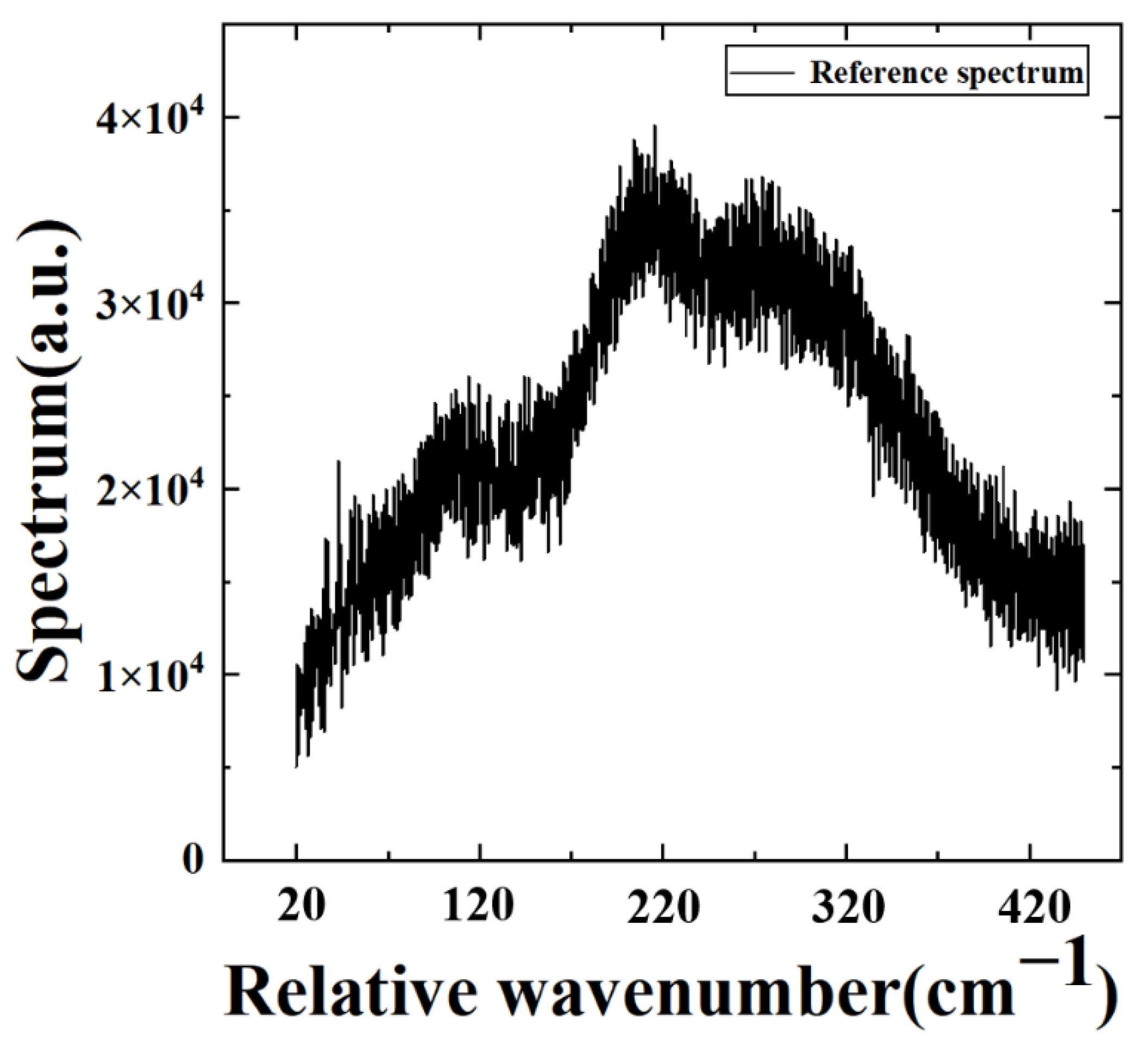
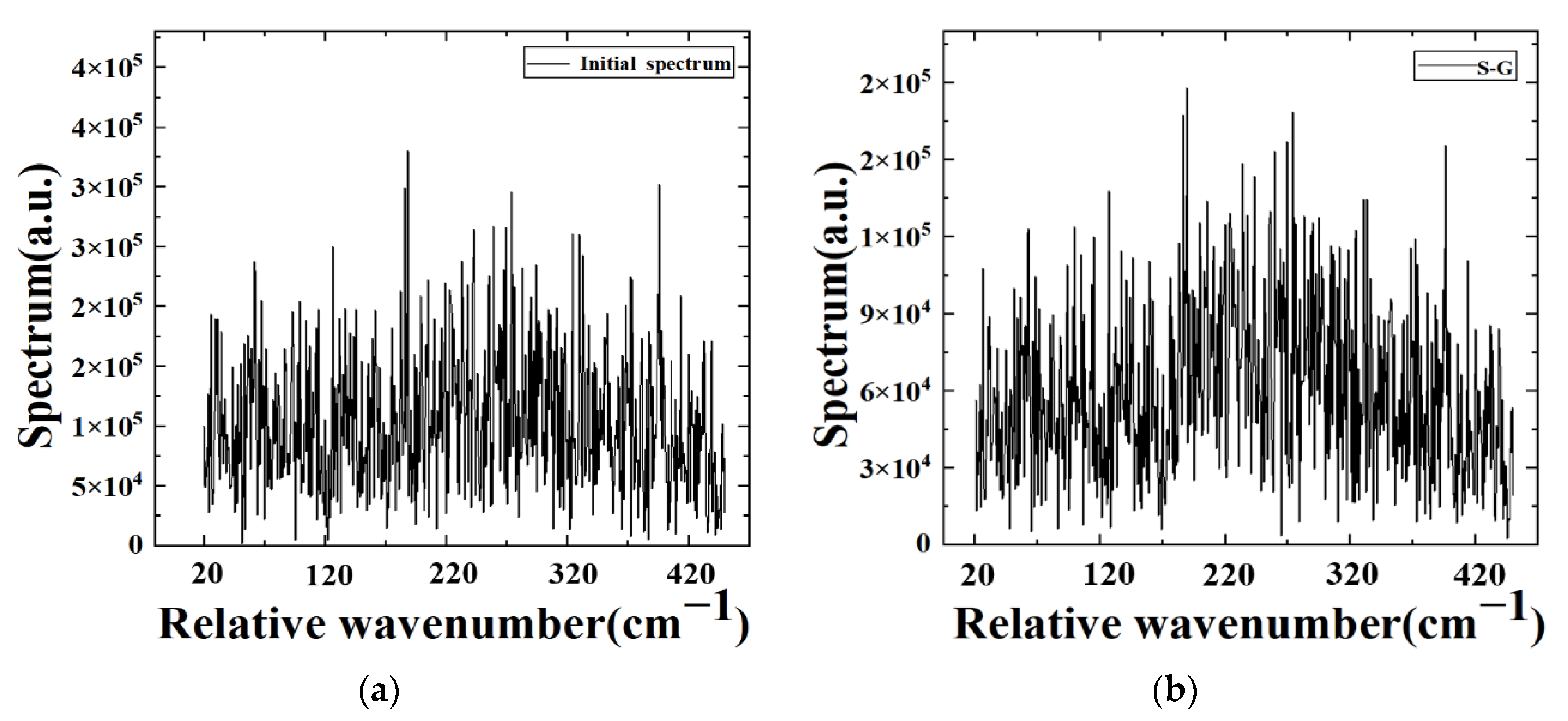
4.2. Denoising Spectra of the 747th Pixel at an 80 MHz Sampling Frequency
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nong, C.; Yin, Q.; Song, C.; Shu, J. Sensitivity analysis of the satellite infrared hyperspectral atmospheric sounder GIIRS on FY-4A. J. Infrared Millim. Waves 2012, 40, 353–362. [Google Scholar] [CrossRef]
- Holmlund, K.; Grandell, J.; Schmetz, J.; Stuhlmann, R.; Bojkov, B.; Munro, R.; Lekouara, M.; Coppens, D.; Viticchie, B.; August, T.; et al. Meteosat Third Generation (MTG): Continuation and Innovation of Observations from Geostationary Orbit. Bull. Am. Meteorol. Soc. 2021, 102, E990–E1015. [Google Scholar] [CrossRef]
- Motteler, H.E.; Strow, L.L. AIRS Deconvolution and the Translation of AIRS-to-CrIS Radiances with Applications for the IR Climate Record. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1793–1803. [Google Scholar] [CrossRef]
- Liu, Q.; Xu, H.; Sha, D.; Lee, T.; Duffy, D.Q.; Walter, J.; Yang, C. Hyperspectral Infrared Sounder Cloud Detection Using Deep Neural Network Model. IEEE Geosci. Remote Sens. Lett. 2020, 19, 5500705. [Google Scholar] [CrossRef]
- Taylor, J.K.; Revercomb, H.E.; Tobin, D.C.; Best, F.A.; Knuteson, R.O.; Elwell, J.D.; Cantwell, G.W.; Scott, D.K.; Bingham, G.E.; Smith, W.L.; et al. The geosynchronous imaging Fourier transform spectrometer (GIFTS): Noise performance. Proc. SPIE 2006, 6405, 118–129. [Google Scholar] [CrossRef]
- Dussarrat, P.; Theodore, B.; Coppens, D.; Standfuss, C.; Tournier, B. Correction of calibration ringing in the context of the MTG-IRS instruments. arXiv 2022, arXiv:2202.10149. [Google Scholar]
- Hua, J.; Wang, Z.; Duan, J.; Li, L.; Zhang, C.; Wu, X.; Fan, Q.; Chen, R.; Sun, X.; Zhao, L.; et al. Review of Geostationary Interferometric Infrared Sounder. Chin. Opt. Lett. 2018, 16, 47–57. [Google Scholar] [CrossRef] [Green Version]
- Chen, R.; Gao, C.; Wu, X.W.; Zhou, S.Y.; Hua, J.W.; Zhao, Z.Y.; Hua, J.W.; Ding, L. Application of FY-4 atmospheric vertical sounder in weather forecast. J. Infrared Millim. Waves 2019, 38, 285–289. [Google Scholar] [CrossRef]
- Minoglou, K.; Nelms, N.; Ciapponi, A.; Weber, H.; Wittig, S.; Leone, B.; Crouzet, P. Infrared image sensor developments supported by the European Space Agency. Infrared Phys. Technol. 2019, 96, 351–360. [Google Scholar] [CrossRef]
- Smith, E.P.G.; Patten, E.A.; Goetz, P.M.; Venzor, G.M.; Roth, J.A.; Nosho, B.Z.; Benson, J.D.; Stoltz, A.J.; Varesi, J.B.; Jensen, J.E.; et al. Fabrication and characterization of two-color midwavelength/long wavelength HgCdTe infrared detectors. J. Electron. Mater. 2006, 35, 1145–1152. [Google Scholar] [CrossRef]
- Gao, C. Research on Fourier Spectral Detect Based on Focal Plane and Interferogram Data Processing Technology. Ph.D. Dis-sertation, Shanghai Institute of Technical Physics of Chinese Academy of Sciences, Shanghai, China, 2020. [Google Scholar]
- Gao, C.; Mao, J.; Chen, R. Correction of interferogram data acquired using a focal plane FT-IR spectrometer system. Appl. Opt. 2018, 57, 2434–2440. [Google Scholar] [CrossRef] [PubMed]
- Meng, X.; Bao, Y.; Liu, J.; Liu, H.; Zhang, X.; Zhang, Y.; Wang, P.; Tang, H.; Kong, F. Regional soil organic carbon prediction model based on a discrete wavelet analysis of hyperspectral satellite data. Int. J. Appl. Earth Obs. 2020, 89, 102111. [Google Scholar] [CrossRef]
- Meng, X.; Liu, L.; Jiang, S.; Zhang, B.; Li, Z. Detection and Revision of Interference Spectral Signals Based on Wavelet Transforms. Acta Opt. Sin. 2019, 39, 0930007. [Google Scholar] [CrossRef]
- Huang, C.; Guo, J.M.; Yu, X.; Yuan, C. The study of interferogram denoising method based on EMD and adaptive filter. Acta Geod. Cartogr. Sin. 2013, 42, 707–714. [Google Scholar]
- Wei, D.; Nagata, Y.; Aketagawa, M. Suppression of noise in modulation frequency range of interferometer using spectral subtraction method. Opt. Commun. 2020, 475, 126294. [Google Scholar] [CrossRef]
- Zhao, A.; Tang, X.; Zhang, Z.; Liu, J. Optimizing Savitzky-Golay parameters and its smoothing pretreatment for FTIR gas spectra. Spectrosc. Spectr. Anal. 2016, 36, 1340–1344. [Google Scholar]
- Meng, X.; Bao, Y.; Ye, Q.; Liu, H.; Zhang, X.; Tang, H.; Zhang, X. Soil Organic Matter Prediction Model with Satellite Hyperspectral Image Based on Optimized Denoising Method. Remote Sens. 2021, 13, 2273. [Google Scholar] [CrossRef]
- Tian, R.; Johnson, D.G.; Reisse, R.A.; Gazarik, M.J. GIFTS SM EDU data processing and algorithms. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007. [Google Scholar]
- Zhu, J.; Liu, B.; Wang, H.; Li, Z.; Zhang, Z. State estimation based on improved cubature Kalman filter algorithm. IET Sci. Meas. Technol. 2020, 14, 536–542. [Google Scholar] [CrossRef]
- Narasimhappa, M.; Sabat, S.L.; Nayak, J. Fiber-Optic Gyroscope Signal Denoising Using an Adaptive Robust Kalman Filter. IEEE Sens. J. 2016, 16, 3711–3718. [Google Scholar] [CrossRef]
- Gao, G.; Gao, S.; Hong, G.; Peng, X.; Yu, T. A Robust INS/SRS/CNS Integrated Navigation System with the Chi-Square Test-Based Robust Kalman Filter. Sensors 2020, 20, 5909. [Google Scholar] [CrossRef]
- Milani, L.; Arcorace, M.; Rivolta, G.; Cuccu, R.; Marzano, F.S. Clear-Air Anomaly Masking Using Kalman Temporal Filter from Geostationary Multispectral Imagery. IEEE Trans. Geosci. Remote Sens. 2020, 58, 7908–7919. [Google Scholar] [CrossRef]
- Ansari, K. Real-Time Positioning Based on Kalman Filter and Implication of Singular Spectrum Analysis. IEEE Geosci. Remote Sens. Lett. 2021, 18, 58–61. [Google Scholar] [CrossRef]
- Yang, W.; Li, Y.; Liu, W.; Chen, J.; Li, C.; Men, Z. Scalloping Suppression for ScanSAR Images Based on Modified Kalman Filter with Preprocessing. IEEE Trans. Geosci. Remote Sens. 2021, 59, 7535–7546. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, T. An Adaptive Kalman Filter Based on Sage Windowing Weights and Variance Components. J. Navig. 2003, 56, 231–240. [Google Scholar] [CrossRef]
- Zong, H.; Gao, Z.; Wei, W.; Zhong, Y.; Gu, C. Randomly Weighted CKF for Multisensor Integrated Systems. J. Sens. 2019, 2019, 1216838. [Google Scholar] [CrossRef]
- Yang, Y. Adaptively Robust Kalman Filters with Applications in Navigation. In Sciences of Geodesy-I, 2nd ed.; Xu, G.C., Ed.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 49–82. [Google Scholar] [CrossRef]
- Xu, T.; Jiang, N.; Sun, Z. An improved adaptive Sage filter with applications in GEO orbit determination and GPS kinematic positioning. Sci. China Phys. Mech. Astron. 2012, 55, 892–898. [Google Scholar] [CrossRef]
- Gao, S.; Hu, G.; Zhong, Y. Windowing and random weighting-based adaptive unscented Kalman filter. Int. J. Adapt. Control Signal Process. 2015, 29, 201–223. [Google Scholar] [CrossRef]
- Narasimhappa, M.; Mahindrakar, A.D.; Guizilini, V.C.; Terra, M.H.; Sabat, S.L. MEMS-Based IMU Drift Minimization: Sage Husa Adaptive Robust Kalman Filtering. IEEE Sens. J. 2020, 20, 250–260. [Google Scholar] [CrossRef]
- Li, M.; Nie, W.; Xu, T.; Rovira-Garcia, A.; Fang, Z.; Xu, G. Helmert Variance Component Estimation for Multi-GNSS Relative Positioning. Sensors 2020, 20, 669. [Google Scholar] [CrossRef] [Green Version]
- Dai, Y.; Dai, W.J. An adaptive robust Kalman filtering method with observation quality information. Eng. Surv. Mapp. 2020, 29, 60–67. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SD | |
|---|---|
| Noisy Interferogram | 1403.30 |
| S-G | 733.50 |
| KF | 372.83 |
| WAKF | 225.58 |
| SD | |
|---|---|
| Noisy Interferogram | 943.62 |
| S-G | 673.80 |
| KF | 510.12 |
| WAKF | 361.10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, Q.; Liu, Y.; Chen, R.; Xu, Z.; Zhang, Y.; Chen, Y.; Huang, J. The Atmospheric Vertical Detection of Large Area Regions Based on Interference Signal Denoising of Weighted Adaptive Kalman Filter. Sensors 2022, 22, 8724. https://doi.org/10.3390/s22228724
Shen Q, Liu Y, Chen R, Xu Z, Zhang Y, Chen Y, Huang J. The Atmospheric Vertical Detection of Large Area Regions Based on Interference Signal Denoising of Weighted Adaptive Kalman Filter. Sensors. 2022; 22(22):8724. https://doi.org/10.3390/s22228724
Chicago/Turabian StyleShen, Qiying, Yongsheng Liu, Ren Chen, Zhijing Xu, Yuan Zhang, Yaxuan Chen, and Jingyu Huang. 2022. "The Atmospheric Vertical Detection of Large Area Regions Based on Interference Signal Denoising of Weighted Adaptive Kalman Filter" Sensors 22, no. 22: 8724. https://doi.org/10.3390/s22228724