
Low-Cost Electromagnetic Split-Ring Resonator Sensor System for the Petroleum Industry

 ,
,
Abstract
:1. Introduction
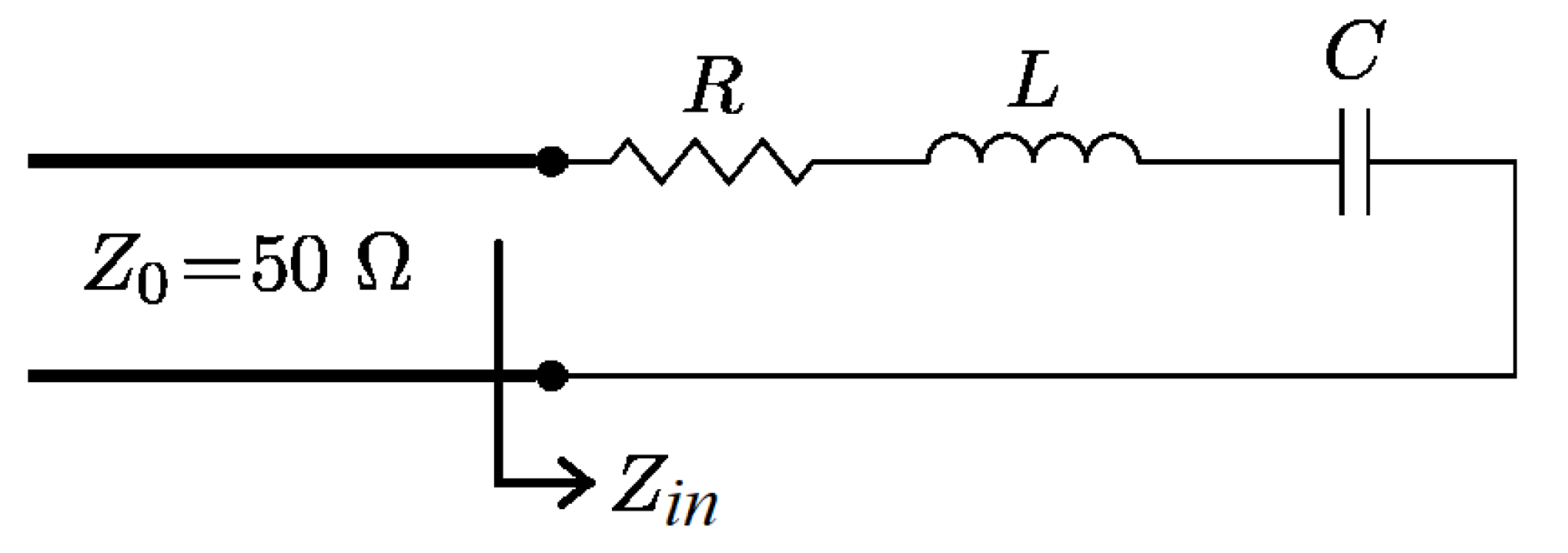
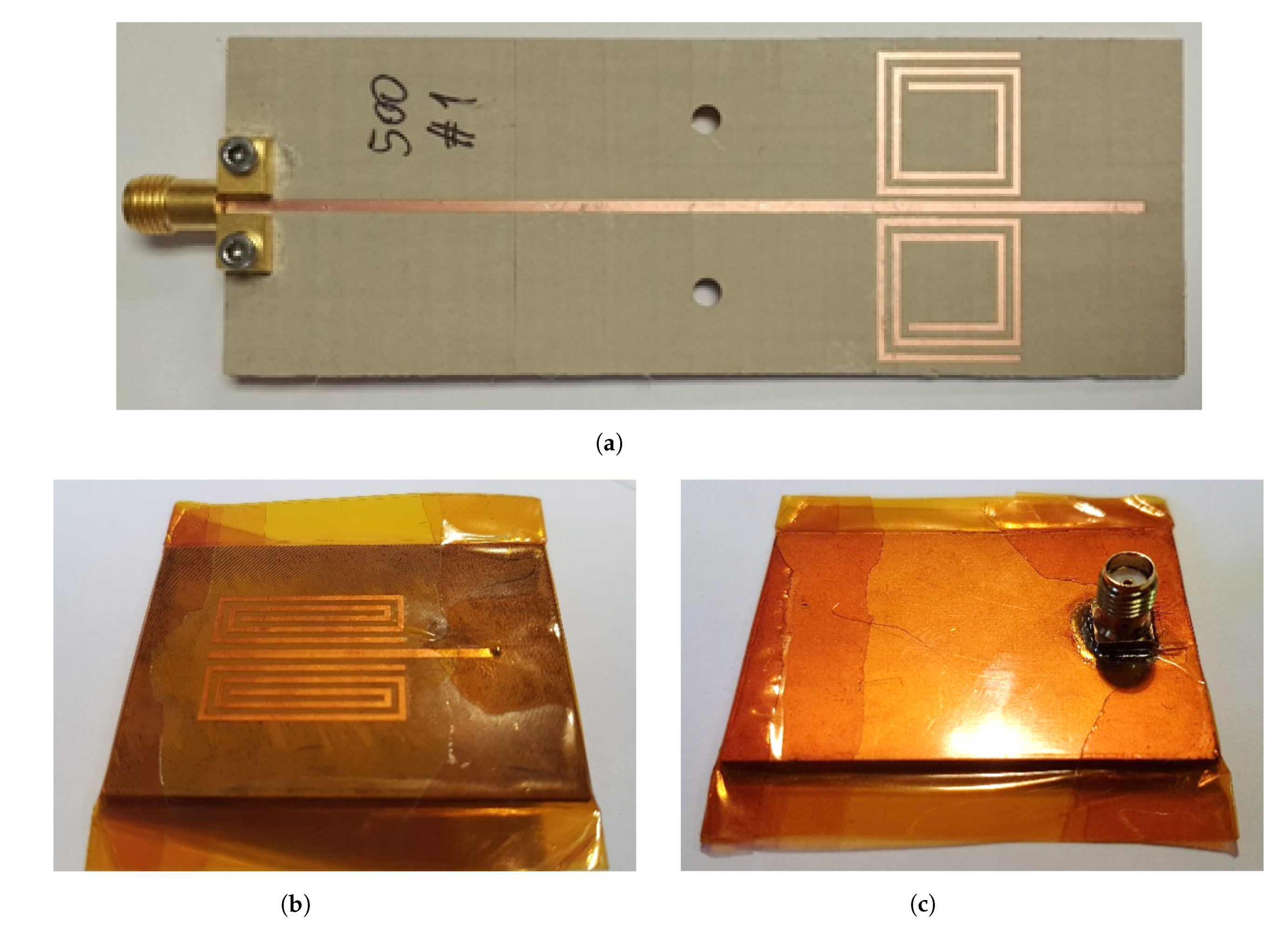
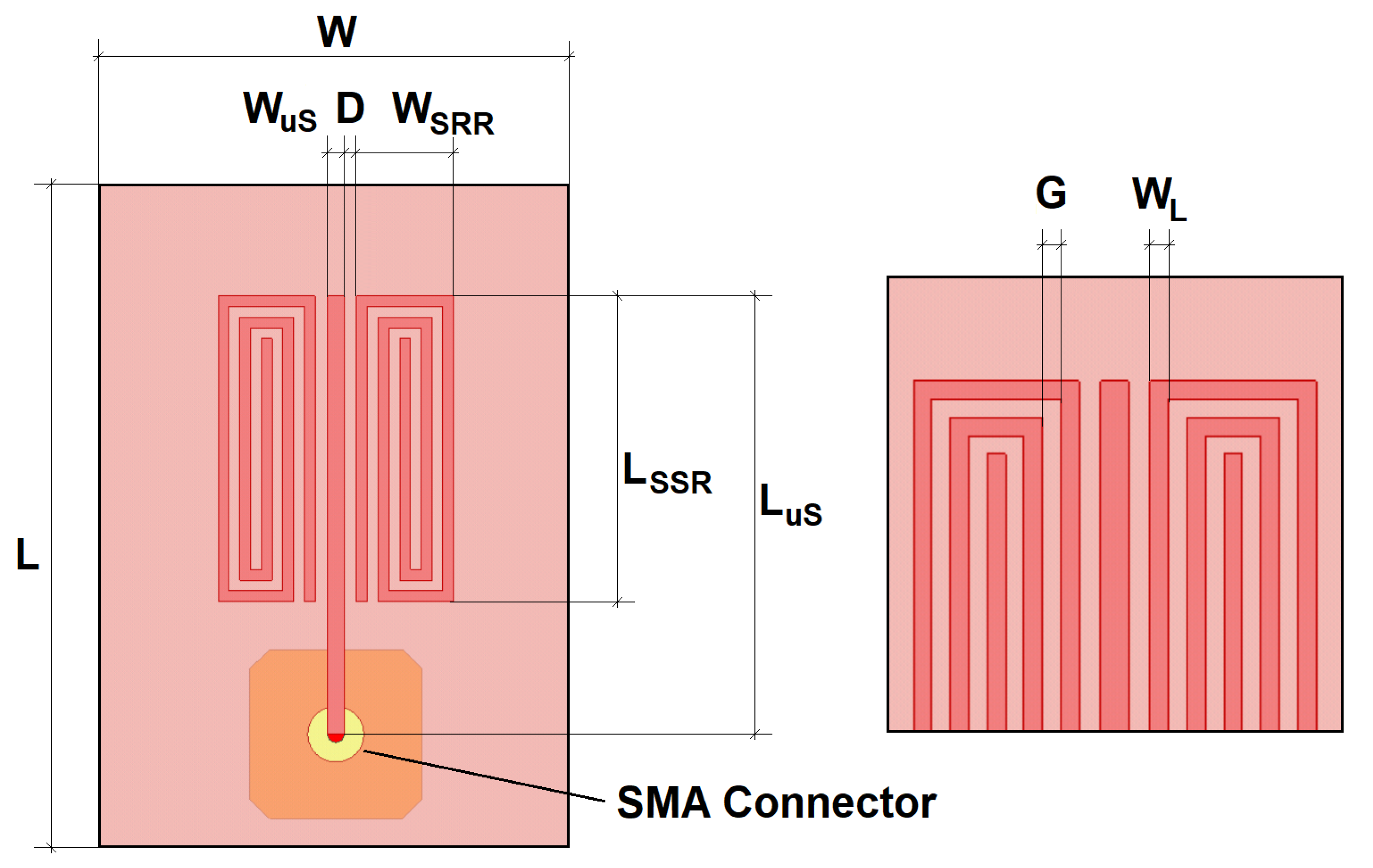
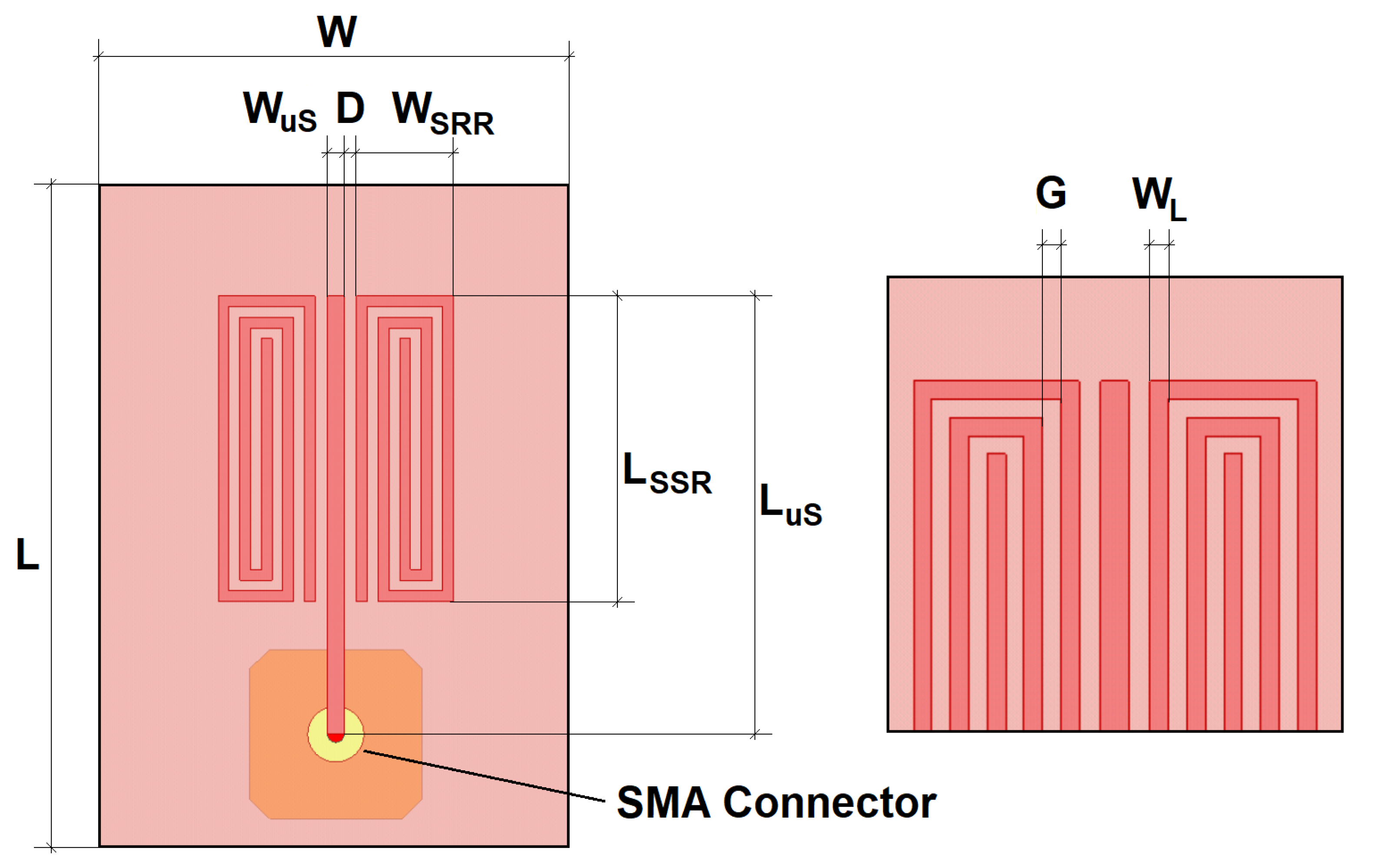
2. Submersible Split-Ring Resonator-Based Sensor
3. Crude Properties Estimation
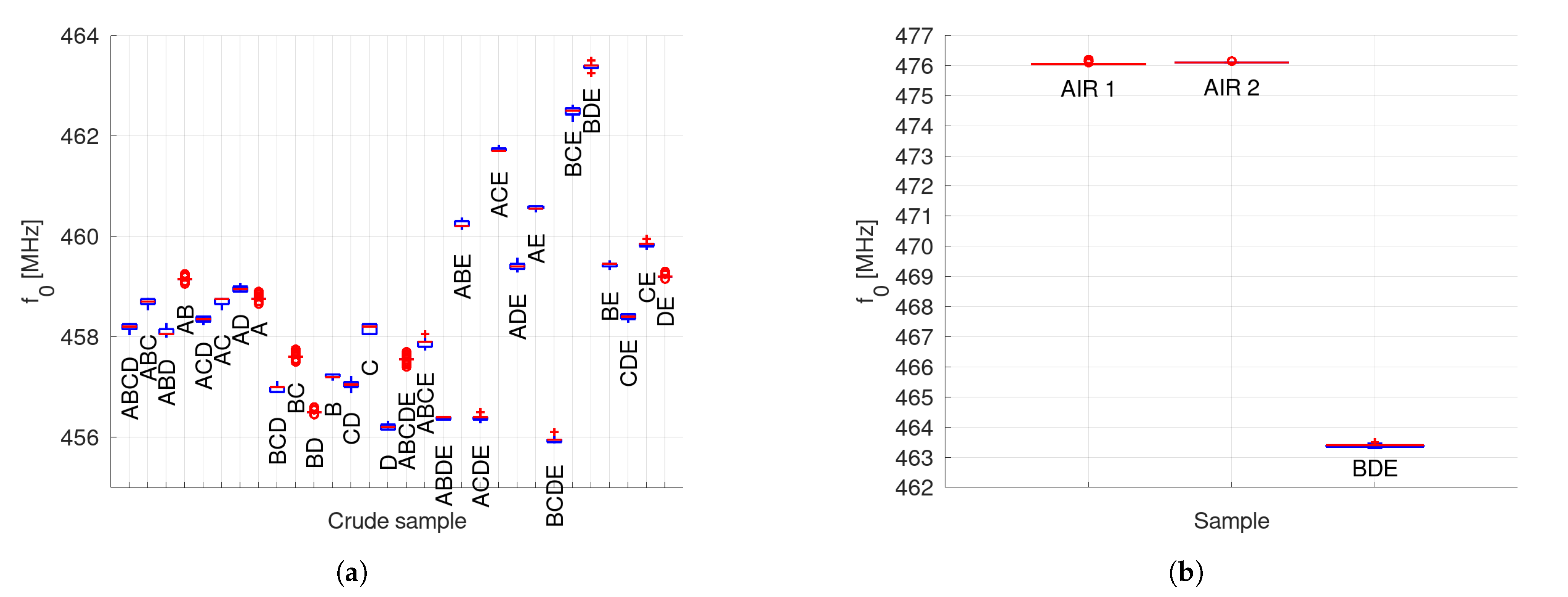
3.1. Discrimination between Different Crude Samples
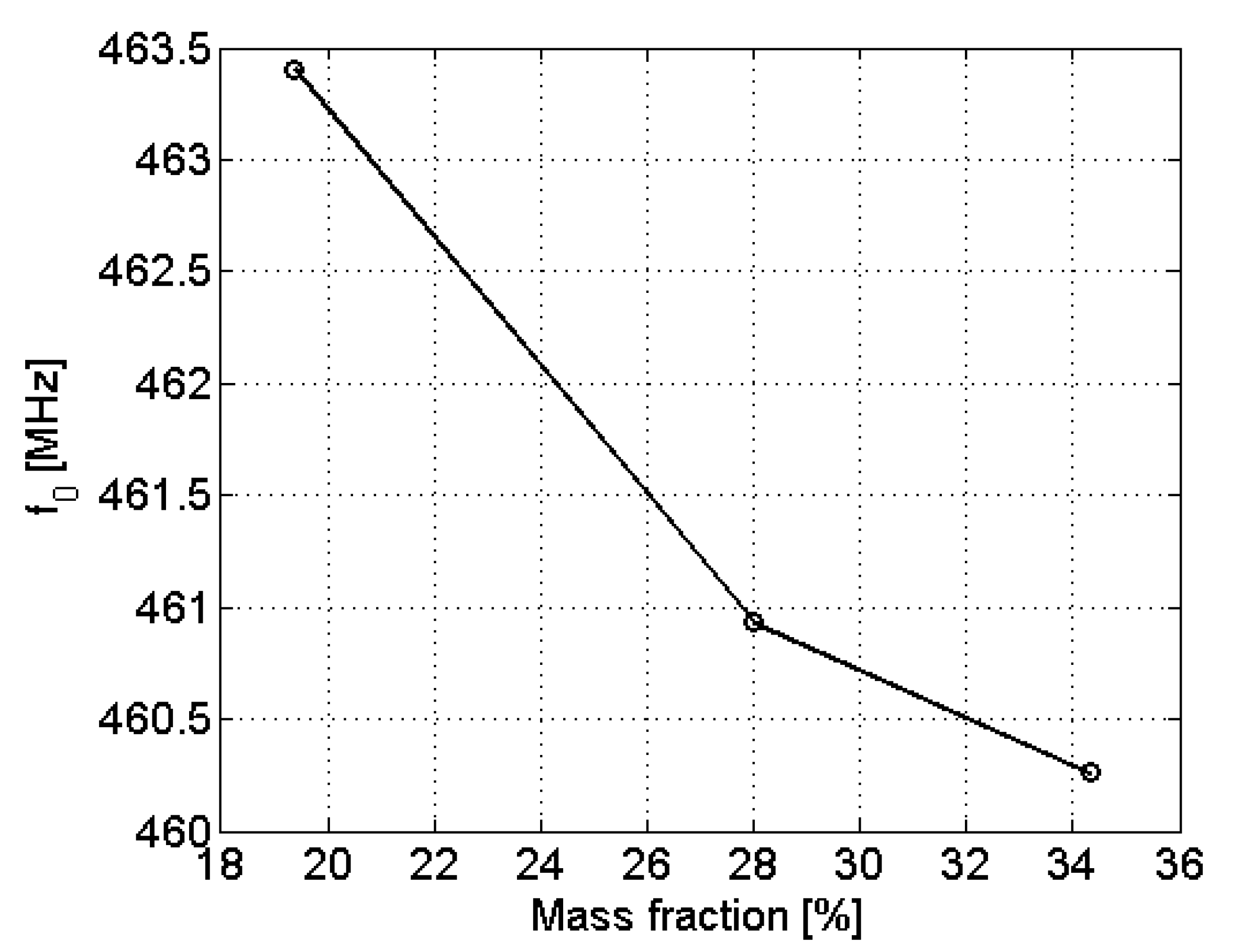
3.2. Sulfur Concentration Estimation
3.3. Aromatic Hydrocarbons Concentration Estimation
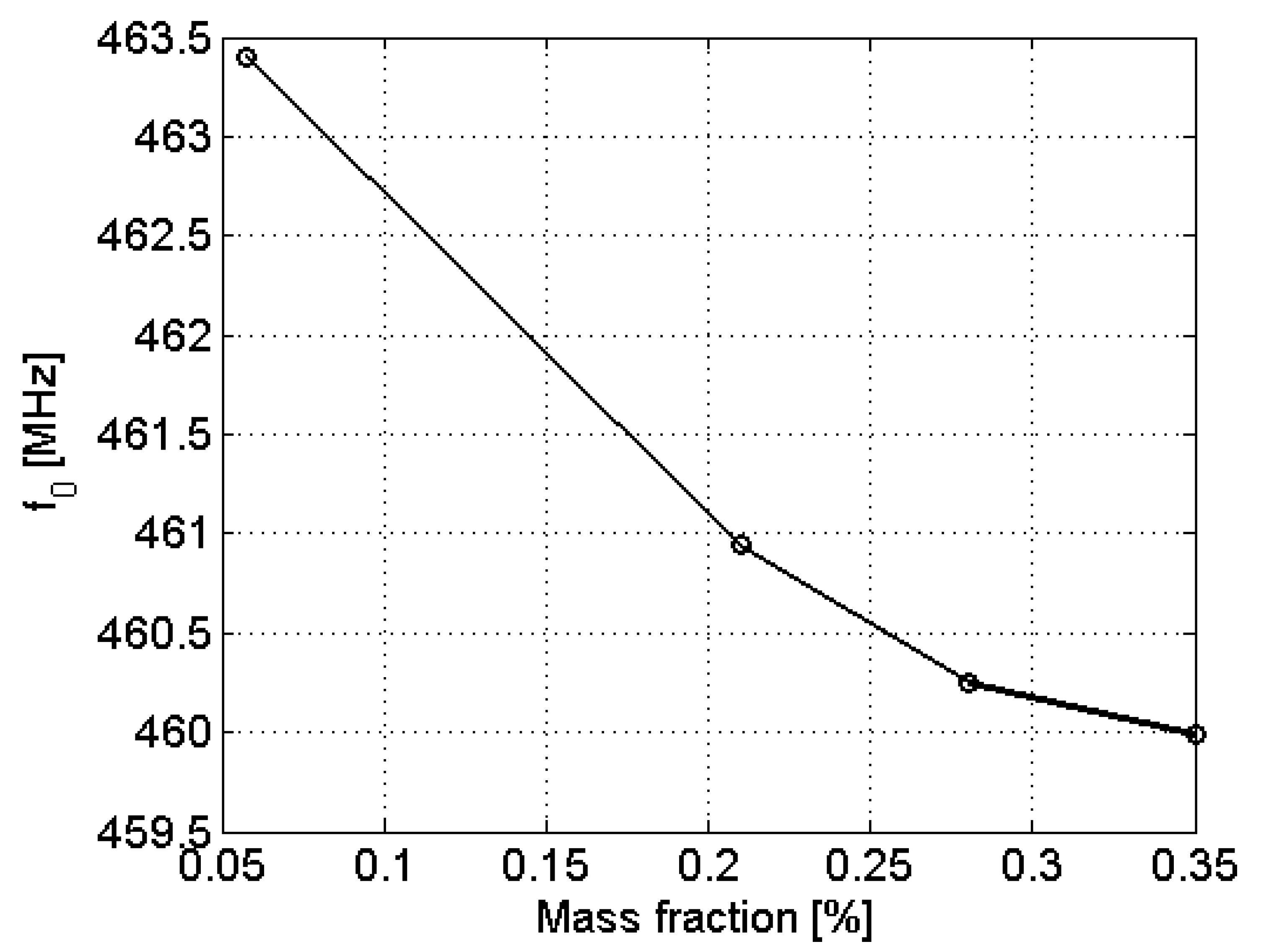
3.4. Salt-Water Concentration
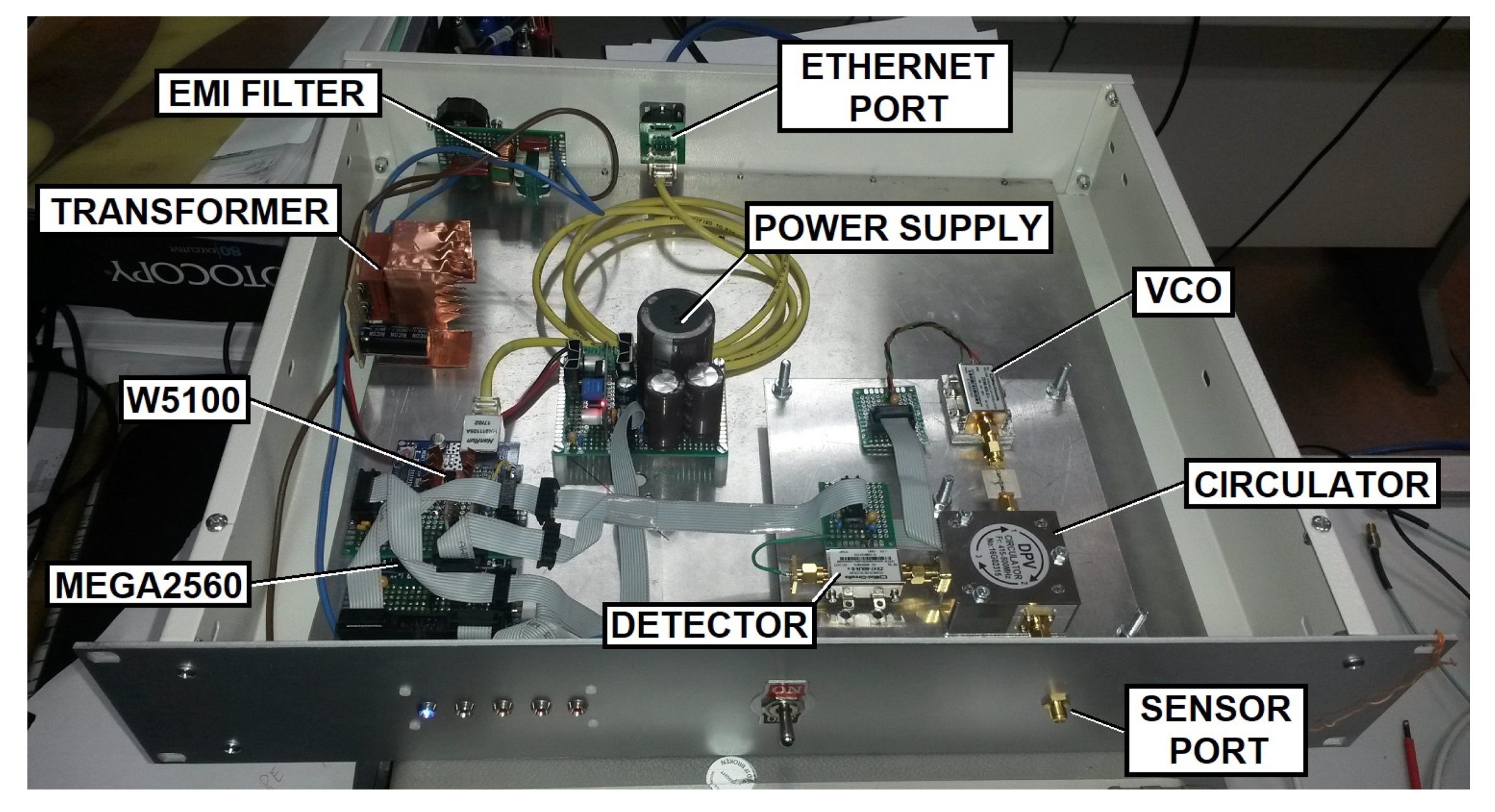
4. SRR Sensor Interrogator
4.1. Transmitter
4.2. Receiver
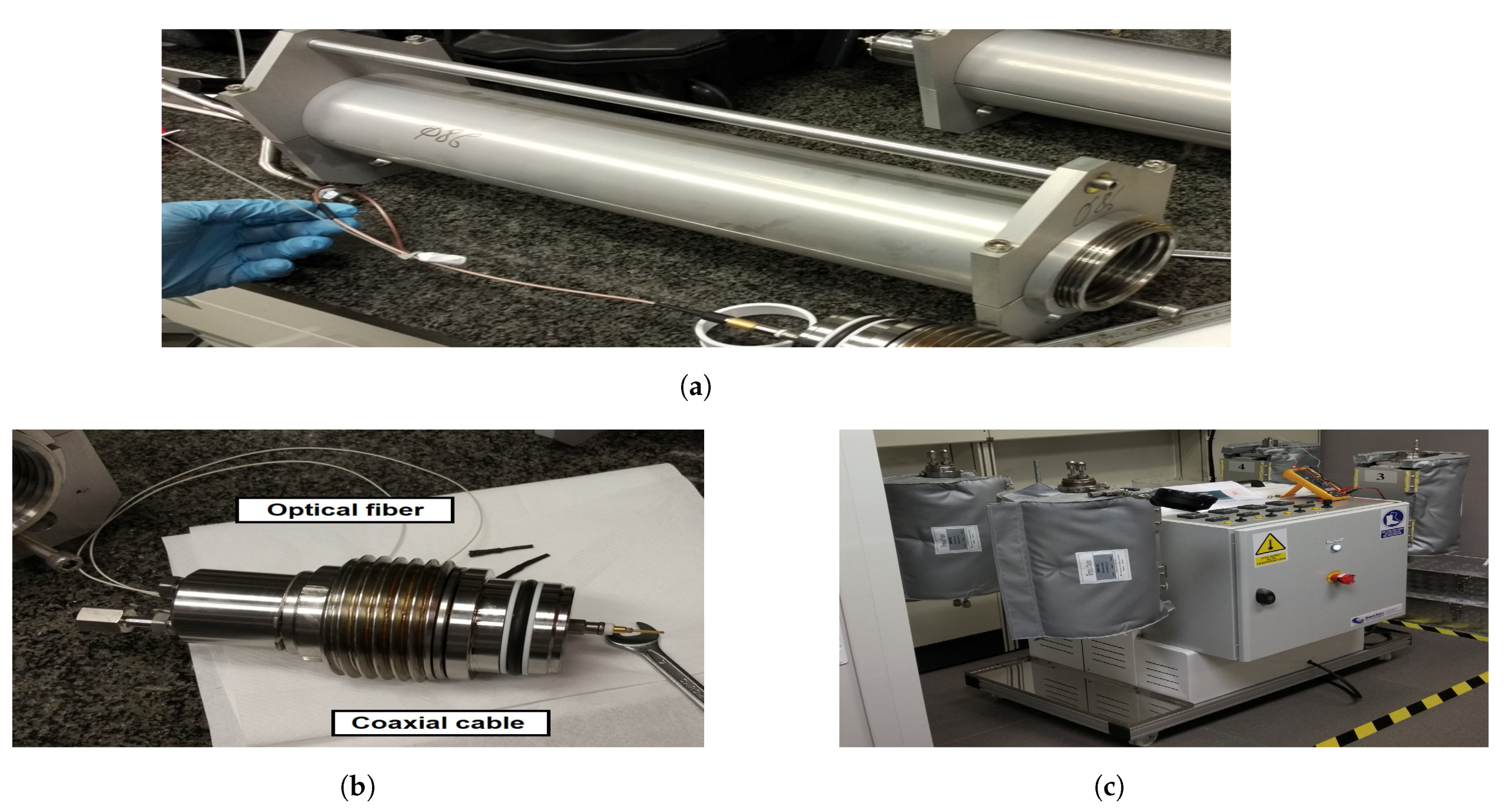
5. High Pressure and High Temperature Measurements
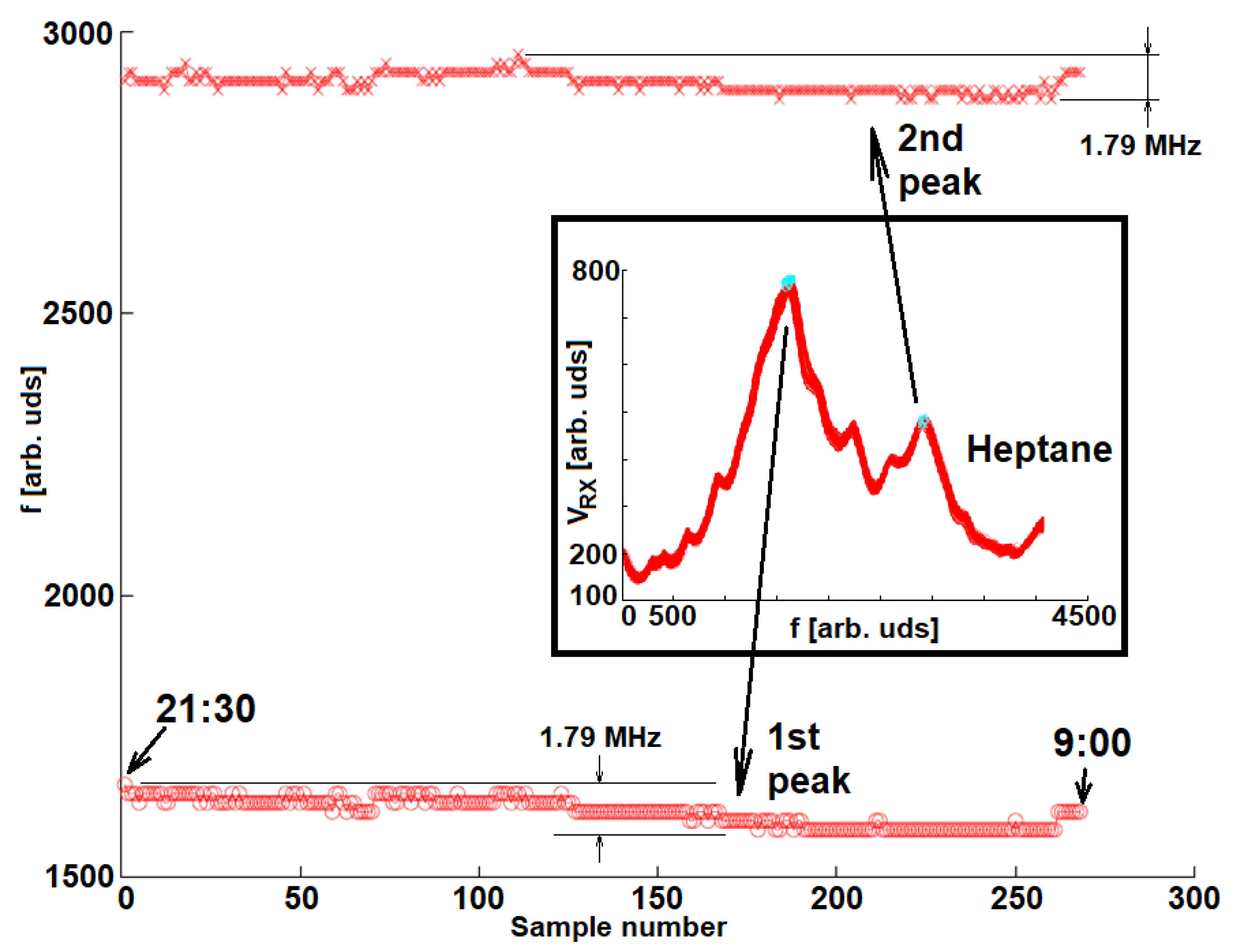
5.1. System Stability
5.2. VNA and Interrogator Comparison
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tubel, P.; Hopmann, M. Intelligent Completion for Oil and Gas Production Control in Subsea Multi-lateral Well Applications. In SPE Annual Technical Conference and Exhibition; OnePetro: Richardson, TX, USA, 1996. [Google Scholar]
- Huiyun, M.; Chenggang, Y.; Liangliang, D.; Yukun, F.; Chungang, S.; Hanwen, S.; Xiaohua, Z. Review of intelligent well technolog. In Petroleum; Elsevier: Amsterdam, The Netherlands, 2019. [Google Scholar]
- Adegboye, M.A.; Fung, W.-K.; Karnik, A. Recent Advances in Pipeline Monitoring and Oil Leakage Detection Technologies: Principles and Approaches. Sensors 2019, 19, 2548. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Riazi, M.R.; Roomi, Y.A. Use of the Refractive Index in the Estimation of Thermophysical Properties of Hydrocarbons and Petroleum Mixtures. Ind. Eng. Chem. Res. 2001, 40, 1975–1984. [Google Scholar] [CrossRef]
- Kersey, A. Optical Fiber Sensors for Permanent Downwell Monitoring Applications in the Oil and Gas Industry. IEICE Trans. Electron. 2001, 84, 400–404. [Google Scholar]
- Jones, C.M.; Dai, B.; Price, J.; Li, J.; Pearl, M.; Soltmann, B.; Myrick, M.L. A New Multivariate Optical Computing Microelement and Miniature Sensor for Spectroscopic Chemical Sensing in Harsh Environments: Design, Fabrication, and Testing. Sensors 2019, 19, 701. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peng, G.; He, J.; Yang, S.; Zhou, W. Application of the fiber-optic distributed temperature sensing for monitoring the liquid level of producing oil wells. Measurement 2014, 58, 130–137. [Google Scholar] [CrossRef]
- Feo, G.; Sharma, J.; Kortukov, D.; Williams, W.; Ogunsanwo, T. Distributed Fiber Optic Sensing for Real-Time Monitoring of Gas in Riser during Offshore Drilling. Sensors 2020, 20, 267. [Google Scholar] [CrossRef] [Green Version]
- Shannon, K.; Li, X.; Wang, Z.; Cheeke, J.D.N. Mode conversion and the path of acoustic energy in a partially water-filled aluminum tube. Ultrasonics 1999, 37, 303–307. [Google Scholar] [CrossRef]
- Rodríguez-Olivares, N.A.; Cruz-Cruz, J.V.; Gómez-Hernández, A.; Hernández-Alvarado, R.; Nava-Balanzar, L.; Salgado-Jiménez, T.; Soto-Cajiga, J.A. Improvement of Ultrasonic Pulse Generator for Automatic Pipeline Inspection. Sensors 2018, 18, 2950. [Google Scholar] [CrossRef] [Green Version]
- Dong, L.; Hu, Q.; Tong, X.; Liu, Y. Velocity-Free MS/AE Source Location Method for Three-Dimensional Hole-Containing Structures. Engineering 2020, 6, 827–834. [Google Scholar] [CrossRef]
- Dong, L.; Tong, X.; Ma, J. Quantitative Investigation of Tomographic Effects in Abnormal Regions of Complex Structures. Engineering 2021, 7, 1011–1022. [Google Scholar] [CrossRef]
- Vutukury, J.N.; Donnell, K.M.; Hilgedick, S. Microwave sensing of sand production from petroleum wells. In Proceedings of the 2015 IEEE International Instrumentation and Measurement Technology Conference (I2MTC) Proceedings, Pisa, Italy, 11–14 May 2015; pp. 1210–1214. [Google Scholar]
- Tayyab, M.; Sharawi M., S.; Al-Sarkhi, A. A Radio Frequency Sensor Array for Dielectric Constant Estimation of Multiphase Oil Flow in Pipelines. IEEE Sens. J. 2017, 17, 5900–5907. [Google Scholar] [CrossRef]
- Pendry, J.B.; Holden, A.J.; Robbins, D.J.; Stewart, W.J. Magnetism from conductors and enhanced nonlinear phenomena. IEEE Trans. Microw. Theory Tech. 1999, 47, 2075–2084. [Google Scholar] [CrossRef] [Green Version]
- Falcone, F.; Lopetegi, T.; Baena, J.D.; Marqués, R.; Martín, F.; Sorolla, M. Effective negative-epsilon stop-band microstrip lines based on complementary split ring resonators. IEEE Microw. Wireless Compon. Lett. 2004, 14, 280–282. [Google Scholar] [CrossRef]
- Naqui, J.; Durán-Sindreu, M.; Martín, F. Alignment and position sensors based on split ring resonators. Sensors 2012, 12, 11790–11797. [Google Scholar] [CrossRef] [Green Version]
- Horestani, A.K.; Fumeaux, C.; Al-Sarawi, S.F.; Abbott, D. Displacement sensor based on diamond-shaped tapered split ring resonator. IEEE Sens. J. 2013, 13, 1153–1160. [Google Scholar] [CrossRef]
- Horestani, A.K.; Abbott, D.; Fumeaux, C. Rotation sensor based on horn-shaped split ring resonator. IEEE Sens. J. 2013, 13, 3014–3015. [Google Scholar] [CrossRef]
- Naqui, J.; Coromina, J.; Karami-Horestani, A.; Fumeaux, C.; Martín, F. Angular displacement and velocity sensors based on coplanar waveguides (CPWs) loaded with S-shaped split ring resonators (S-SRR). Sensors 2015, 15, 9628–9650. [Google Scholar] [CrossRef] [Green Version]
- Choi, H.; Nylon, J.; Luzio, S.; Beutler, J.; Porch, A. Design of continuous non-invasive blood glucose monitoring sensor based on a microwave split ring resonator. In Proceedings of the 2014 IEEE MTT-S International Microwave Workshop Series on RF and Wireless Technologies for Biomedical and Healthcare Applications (IMWS-Bio2014), London, UK, 18–20 December 2018; pp. 1–3. [Google Scholar]
- Lee, C.-S.; Yang, C.-L. Thickness and permittivity measurement in multi-layered dielectric structures using complementary Split-Ring Resonators. IEEE Sens. J. 2014, 14, 695–700. [Google Scholar] [CrossRef]
- Galindo-Romera, G.; Herraiz-Martínez, F.J.; Gil, M.; Martínez-Martínez, J.J.; Segovia-Vargas, D. Submersible printed Split-Ring Resonator-based sensor for thin-film detection and permittivity characterization. IEEE Sens. J. 2016, 16, 3587–3596. [Google Scholar] [CrossRef]
- Vélez, P.; Su, L.; Grenier, K.; Mata-Contreras, J.; Dubuc, D.; Martín, F. Microwave Microfluidic Sensor Based on a Microstrip Splitter/Combiner Configuration and Split Ring Resonators (SRRs) for Dielectric Characterization of Liquids. IEEE Sens. J. 2017, 17, 6589–6598. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.-S.; Yang, C.-L. Complementary Split-Ring Resonators for measuring dielectric constants and loss tangents. IEEE Microw. Wireless Compon. Lett. 2014, 24, 563–565. [Google Scholar] [CrossRef]
- Kulkarni, S.; Joshi, M.S. Design and analysis of shielded vertically stacked ring resonator as complex permittivity sensor for petroleum oils. IEEE Trans. Microw. Theory Techn. 2015, 63, 2411–2417. [Google Scholar] [CrossRef]
- Lijuan, S.; Mata-Contreras, J.; Vélez, P.; Fernández-Prieto, A.; Martín, F. Analytical Method to Estimate the Complex Permittivity of Oil Samples. Sensors 2018, 18, 984. [Google Scholar]
- Minicircuits ZX95-625+ Voltage Controlled Oscillator Datasheet. Available online: Https://www.minicircuits.com/pdfs/ZX95-625+.pdf (accessed on 11 March 2022).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample | VNA [MHz] | Interrogator [MHz] | VNA | Interrogator |
|---|---|---|---|---|
| Air (before) | 470.22 | 470.35 | 0.025 | 0.000 |
| Air (after) | 470.22 | 470.11 | 0.024 | 0.207 |
| CRUDE-1 | 451.88 | 451.85 | 0.038 | 0.185 |
| CRUDE-2 | 453.60 | 453.88 | 0.016 | 0.000 |
| CRUDE-3 | 455.61 | 455.33 | 0.022 | 0.078 |
| CRUDE-4 | 453.97 | 454.06 | 0.038 | 0.196 |
| CRUDE-5 | 453.71 | 453.63 | 0.026 | 0.167 |
| CRUDE-6 | 453.14 | 453.16 | 0.037 | 0.000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rivera-Lavado, A.; García-Lampérez, A.; Jara-Galán, M.-E.; Gallo-Valverde, E.; Sanz, P.; Segovia-Vargas, D. Low-Cost Electromagnetic Split-Ring Resonator Sensor System for the Petroleum Industry. Sensors 2022, 22, 3345. https://doi.org/10.3390/s22093345
Rivera-Lavado A, García-Lampérez A, Jara-Galán M-E, Gallo-Valverde E, Sanz P, Segovia-Vargas D. Low-Cost Electromagnetic Split-Ring Resonator Sensor System for the Petroleum Industry. Sensors. 2022; 22(9):3345. https://doi.org/10.3390/s22093345
Chicago/Turabian StyleRivera-Lavado, Alejandro, Alejandro García-Lampérez, María-Estrella Jara-Galán, Emilio Gallo-Valverde, Paula Sanz, and Daniel Segovia-Vargas. 2022. "Low-Cost Electromagnetic Split-Ring Resonator Sensor System for the Petroleum Industry" Sensors 22, no. 9: 3345. https://doi.org/10.3390/s22093345