

NeuroSuitUp: System Architecture and Validation of a Motor Rehabilitation Wearable Robotics and Serious Game Platform
 , , ,
, , ,  , ,
, ,  , , , , , , , , , ,
, , , , , , , , , ,  , and
, and
Abstract
:1. Introduction
1.1. Background
1.2. Rehabilitation and Promoting Neural Plasticity
1.3. Robotics and Synergies in Rehabilitation
1.4. The NeuroSuitUp Approach
2. Materials and Methods
2.1. Hardware Layer
On-Board Power Supply Unit
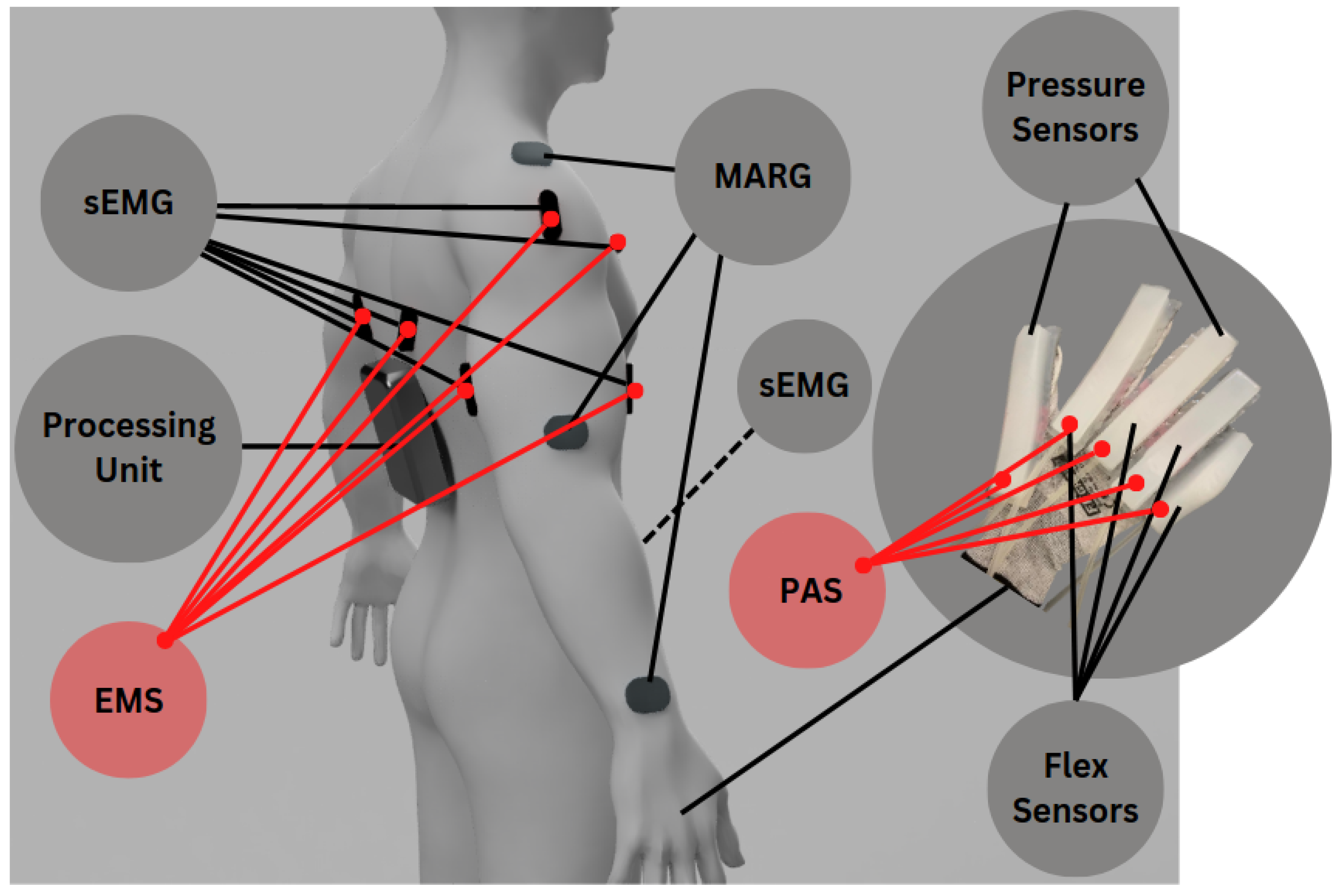
2.2. Sensors
2.2.1. MARG
2.2.2. Surface Electromyography
2.2.3. Flex Sensors
2.2.4. Pressure Sensors
2.3. Actuators
2.3.1. EMS
2.3.2. Pneumatics
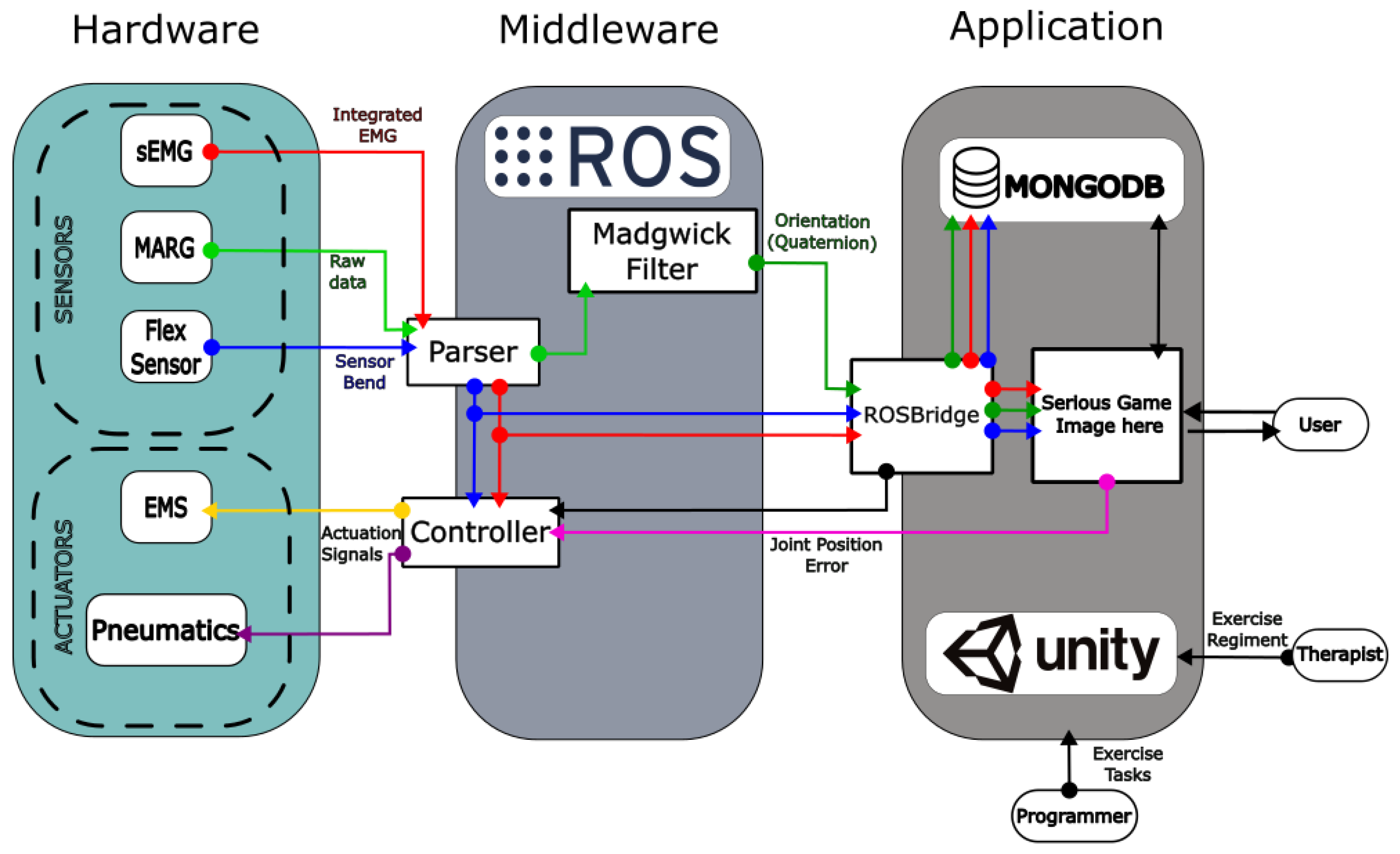
2.4. Middleware Layer
2.5. Application Layer
3. System Validation
3.1. On-Board MARG Sensor Validation through the Use of Stereoscopic Vision
3.2. Soft-Robotic Glove Experimental Setup
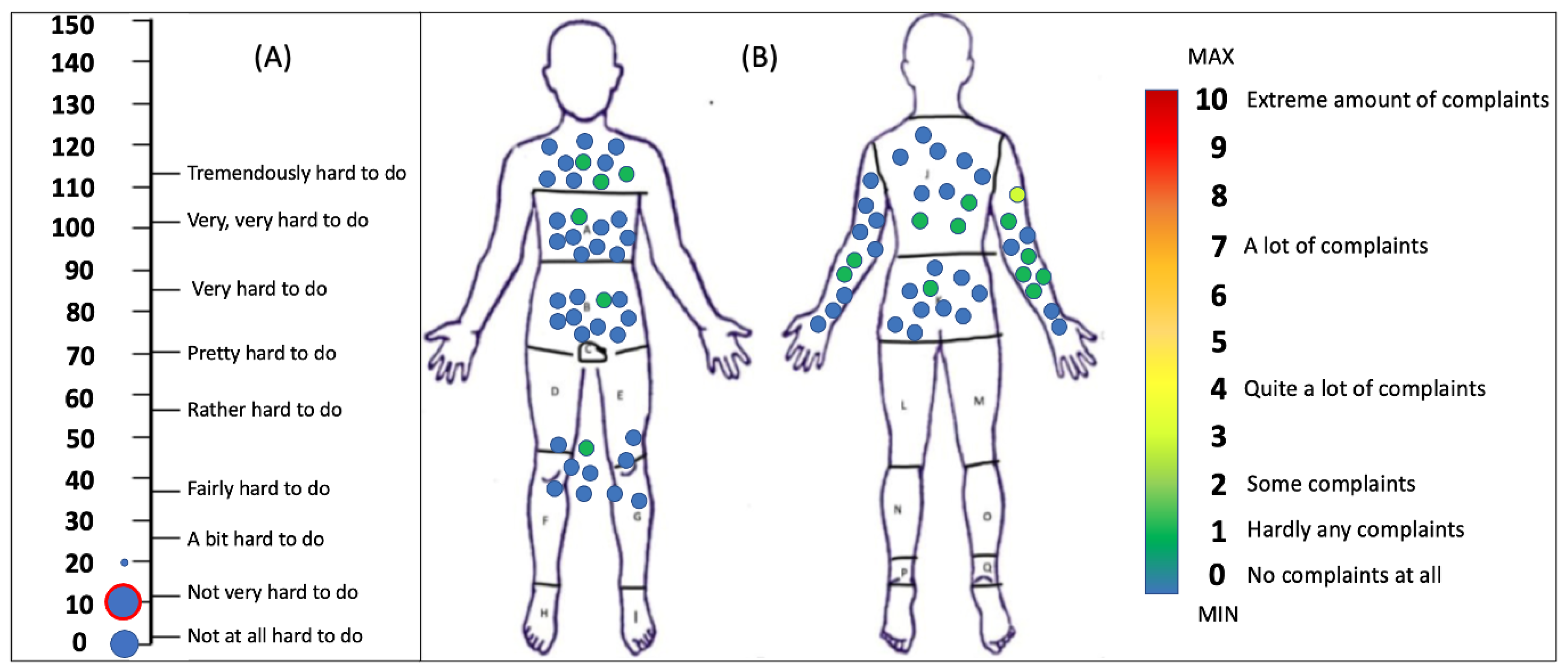
3.3. Participants and Questionnaires
3.4. Statistical Analysis
4. Results
4.1. Robotic Jacket Experimental Results
4.2. Soft Robotic Glove Results
4.3. User Experience
5. Discussion
5.1. Key Findings, Limitations, and Future Development
5.2. Related Work
5.3. Clinical Scope
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADC | Analogue to Digital Converter |
| ADL | Activity of Daily Living |
| AI | Artificial Intelligence |
| ANN | Artificial Neural Network |
| AR | Augmented Reality |
| BDNF | Brain-Derived Neurotrophic Factor |
| BERD | Biomedical Electronics Robotics & Devices |
| BMI | Body–Machine Interface |
| BMS | Battery Management System |
| DoF | Degrees-of-Freedom |
| EMG | Electromyography |
| EMS | Electrical Muscle Stimulation |
| FES | Functional Electrical Stimulation |
| IQR | InterQuartile Range |
| LED | Locally Experienced Discomfort Questionnaire |
| MARG | Magnetic Angular Rate & Gravity |
| MCU | MicroController Unit |
| MSS | Multi-Sensor Subsystem |
| MoU | Memorandum of Understanding |
| NMES | NeuroMuscular Electrical Stimulation |
| PAM | Pneumatic Artificial Muscle |
| PAS | Pneumatic Actuation Subsystem |
| PD | Proportional Derivative |
| PneuNets | Pneumatic Networks |
| Q1 | First Quartile |
| Q3 | Third Quartile |
| ROS | Robot Operating System |
| sEMG | Surface Electromyography |
| SCI | Spinal Cord Injury |
| SDK | Software Development Kit |
| SMEQ | Subjective Mental Effort Questionnaire |
| SRG | Soft Robotic Glove |
| STEM | Science Technology Engineering Mathematics |
| USB | Universal Serial Bus |
| VR | Virtual Reality |
| XR | eXtended Reality |
References
- Nizamis, K.; Athanasiou, A.; Almpani, S.; Dimitrousis, C.; Astaras, A. Converging Robotic Technologies in Targeted Neural Rehabilitation: A Review of Emerging Solutions and Challenges. Sensors 2021, 21, 84. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization. Rehabilitation Fact Sheet. 2021. Available online: https://www.who.int/news-room/fact-sheets/detail/rehabilitation (accessed on 3 February 2023).
- Feigin, V.L.; Brainin, M.; Norrving, B.; Martins, S.; Sacco, R.L.; Hacke, W.; Fisher, M.; Pandian, J.; Lindsay, P. World Stroke Organization (WSO): Global stroke fact sheet 2022. Int. J. Stroke 2022, 17, 18–29. [Google Scholar] [CrossRef] [PubMed]
- Coleman, E.R.; Moudgal, R.; Lang, K.; Hyacinth, H.I.; Awosika, O.O.; Kissela, B.M.; Feng, W. Early Rehabilitation After Stroke: A Narrative Review. Curr. Atheroscler. Rep. 2017, 19, 59. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Johansen, M.; Jones, L.; Krassioukov, A.; Mulcahey, M.; Schmidt-Read, M.; Warring, W. International standards for neurological classification of spinal cord injury (revised 2011). J. Spinal Cord. Med. 2011, 34, 535–546. [Google Scholar]
- Aadal, L.; Pallesen, H.; Arntzen, C.; Moe, S. Municipal cross-disciplinary rehabilitation following stroke in Denmark and Norway: A qualitative study. Rehabil. Res. Pract. 2018, 2018, 1972190. [Google Scholar] [CrossRef] [Green Version]
- Wu, H.; Yan, H.; Yang, Y.; Xu, M.; Shi, Y.; Zeng, W.; Li, J.; Zhang, J.; Chang, C.; Wang, N. Occupational neuroplasticity in the human brain: A critical review and meta-analysis of neuroimaging studies. Front. Hum. Neurosci. 2020, 14, 215. [Google Scholar] [CrossRef]
- Pandria, N.; Athanasiou, A.; Konstantara, L.; Karagianni, M.; Bamidis, P. Advances in biofeedback and neurofeedback studies on smoking. NeuroImage Clin. 2020, 28, 102397. [Google Scholar] [CrossRef]
- Bowman, T.; Gervasoni, E.; Arienti, C.; Lazzarini, S.G.; Negrini, S.; Crea, S.; Cattaneo, D.; Carrozza, M.C. Wearable devices for biofeedback rehabilitation: A systematic review and meta-analysis to design application rules and estimate the effectiveness on balance and gait outcomes in neurological diseases. Sensors 2021, 21, 3444. [Google Scholar] [CrossRef]
- Konstantinidis, E.I.; Billis, A.S.; Mouzakidis, C.A.; Zilidou, V.I.; Antoniou, P.E.; Bamidis, P.D. Design, implementation, and wide pilot deployment of FitForAll: An easy to use exergaming platform improving physical fitness and life quality of senior citizens. IEEE J. Biomed. Health Inform. 2014, 20, 189–200. [Google Scholar] [CrossRef]
- Tosto-Mancuso, J.; Tabacof, L.; Herrera, J.E.; Breyman, E.; Dewil, S.; Cortes, M.; Correa-Esnard, L.; Kellner, C.P.; Dangayach, N.; Putrino, D. Gamified Neurorehabilitation Strategies for Post-stroke Motor Recovery: Challenges and Advantages. Curr. Neurol. Neurosci. Rep. 2022, 22, 183–195. [Google Scholar] [CrossRef]
- Gassert, R.; Dietz, V. Rehabilitation robots for the treatment of sensorimotor deficits: A neurophysiological perspective. J. Neuroeng. Rehabil. 2018, 15, 46. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chellal, A.A.; Lima, J.; Gonçalves, J.; Fernandes, F.P.; Pacheco, F.; Monteiro, F.; Brito, T.; Soares, S. Robot-Assisted Rehabilitation Architecture Supported by a Distributed Data Acquisition System. Sensors 2022, 22, 9532. [Google Scholar] [CrossRef] [PubMed]
- Jayaraman, A.; Marinov, B.; Singh, Y.; Burt, S.; Rymer, W. Current evidence for use of robotic exoskeletons in rehabilitation. In Wearable Robotics; Elsevier: Amsterdam, The Netherlands, 2019; pp. 301–310. [Google Scholar] [CrossRef]
- Nizamis, K.; Stienen, A.; Kamper, D.; Keller, T.; Plettenburg, D.; Rouse, E.; Farina, D.; Koopman, B.; Sartori, M. Transferrable Expertise From Bionic Arms to Robotic Exoskeletons: Perspectives for Stroke and Duchenne Muscular Dystrophy. IEEE Trans. Med. Robot. Bionics 2019, 1, 88–96. [Google Scholar] [CrossRef]
- Eapen, B.C.; Murphy, D.P.; Cifu, D.X. Neuroprosthetics in amputee and brain injury rehabilitation. Exp. Neurol. 2016, 287, 479–485. [Google Scholar] [CrossRef]
- Graimann, B.; Dietl, H. Introduction to upper limb prosthetics. In Introduction to Neural Engineering for Motor Rehabilitation; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2013; Volume 14, pp. 267–290. Available online: http://xxx.lanl.gov/abs/https://onlinelibrary.wiley.com/doi/pdf/10.1002/9781118628522.ch14 (accessed on 17 February 2023). [CrossRef]
- Giansanti, D. The Rehabilitation and the Robotics: Are They Going Together Well? Healthcare 2021, 9, 26. [Google Scholar] [CrossRef]
- Garcia-Gonzalez, A.; Fuentes-Aguilar, R.; Salgado, I.; Chairez, I. A review on the application of autonomous and intelligent robotic devices in medical rehabilitation. J. Braz. Soc. Mech. Sci. Eng. 2022, 44. [Google Scholar] [CrossRef]
- Poli, P.; Morone, G.; Rosati, G.; Masiero, S. Robotic technologies and rehabilitation: New tools for stroke patients’ therapy. Biomed. Res. Int. 2013, 2013, 153872. [Google Scholar] [CrossRef]
- Fasoli, S.E.; Adans-Dester, C.P. A Paradigm Shift: Rehabilitation Robotics, Cognitive Skills Training, and Function After Stroke. Front. Neurol. 2019, 10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Reinkensmeyer, D.J.; Blackstone, S.; Bodine, C.; Brabyn, J.; Brienza, D.; Caves, K.; DeRuyter, F.; Durfee, E.; Fatone, S.; Fernie, G.; et al. How a diverse research ecosystem has generated new rehabilitation technologies: Review of NIDILRR’s Rehabilitation Engineering Research Centers. J. Neuroeng. Rehabil. 2017, 14, 109. [Google Scholar] [CrossRef] [Green Version]
- Takebayashi, T.; Takahashi, K.; Amano, S.; Uchiyama, Y.; Gosho, M.; Domen, K.; Hachisuka, K. Assessment of the efficacy of ReoGo-J robotic training against other rehabilitation therapies for upper-limb hemiplegia after stroke: Protocol for a randomized controlled trial. Front. Neurol. 2018, 9, 730. [Google Scholar] [CrossRef] [Green Version]
- Pehlivan, A.U.; Sergi, F.; Erwin, A.; Yozbatiran, N.; Francisco, G.E.; O’Malley, M.K. Design and validation of the RiceWrist-S exoskeleton for robotic rehabilitation after incomplete spinal cord injury. Robotica 2014, 32, 1415–1431. [Google Scholar] [CrossRef] [Green Version]
- Adithya, K.; Kuruvila, S.J.; Pramode, S.; Krupa, N. Brain computer Interface for neurorehabilitation with kinesthetic feedback. In Proceedings of the 2020 5th International Conference on Robotics and Automation Engineering (ICRAE), Singapore, 20–22 November 2020; pp. 153–157. [Google Scholar]
- Meade, M.A.; Maslowski, E. Development of a Serious Gaming App for Individuals with Spinal Cord Injury. J. Technol. Pers. Disabil. 2018, 6, 162–180. [Google Scholar]
- Athanasiou, A.; Mitsopoulos, K.; Praftsiotis, A.; Astaras, A.; Antoniou, P.; Pandria, N.; Petronikolou, V.; Kasimis, K.; Lyssas, G.; Terzopoulos, N.; et al. Neurorehabilitation Through Synergistic Man-Machine Interfaces Promoting Dormant Neuroplasticity in Spinal Cord Injury: Protocol for a Nonrandomized Controlled Trial. JMIR Res. Protoc. 2022, 11, e41152. [Google Scholar] [CrossRef]
- ClinicalTrials.gov. Identifier NCT00287391, NeuroSuitUp: Neurorehabilitation through Synergistic Man-Machine Interfaces. 2022. Available online: http://xxx.lanl.gov/abs/https://www.clinicaltrials.gov/ct2/show/NCT05465486?term=NCT05465486%09NeuroSuitUp%3A+Neurorehabilitation+Through+Synergistic+Man-machine+Interfaces&draw=2&rank=1 (accessed on 1 March 2023).
- HEROES. HEROES—Human Extremity Robotic Rehabilitation & Outcome Enhancement for Stroke. 2022. Available online: https://heroes.med.auth.gr/ (accessed on 5 February 2023).
- Ibrahim, J.; Danladi, T.A.; Aderinola, M. Comparative analysis between wired and wireless technologies in communications: A review. In Proceedings of the 9th IIER International Conference, Mecca, Saudi Arabia, 23 March 2017; pp. 23–24. [Google Scholar]
- Chen, C.; Man, K.L.; Ting, T.; Lei, C.U.; Krilavičius, T.; Jeong, T.; Seon, J.; Guan, S.; Wong, P.W.H. Design and realization of a smart battery management system. Lect. Notes Eng. Comput. Sci. 2012, 2196, 1173–1176. [Google Scholar]
- DelPreto, J.; Rus, D. Sharing the load: Human-robot team lifting using muscle activity. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 7906–7912. [Google Scholar]
- Saggio, G.; Orengo, G. Flex sensor characterization against shape and curvature changes. Sensors Actuators Phys. 2018, 273, 221–231. [Google Scholar] [CrossRef]
- Gorgey, A.S. Robotic exoskeletons: The current pros and cons. World J. Orthop. 2018, 9, 112. [Google Scholar] [CrossRef]
- Enoka, R.M.; Amiridis, I.G.; Duchateau, J. Electrical stimulation of muscle: Electrophysiology and rehabilitation. Physiology 2019. [Google Scholar] [CrossRef]
- Yang, J.D.; Liao, C.D.; Huang, S.W.; Tam, K.W.; Liou, T.H.; Lee, Y.H.; Lin, C.Y.; Chen, H.C. Effectiveness of electrical stimulation therapy in improving arm function after stroke: A systematic review and a meta-analysis of randomised controlled trials. Clin. Rehabil. 2019, 33, 1286–1297. [Google Scholar] [CrossRef]
- Dunkelberger, N.; Schearer, E.M.; O’Malley, M.K. A review of methods for achieving upper limb movement following spinal cord injury through hybrid muscle stimulation and robotic assistance. Exp. Neurol. 2020, 328, 113274. [Google Scholar] [CrossRef]
- Lyu, C.; Holst, B.; Röhren, F.; Penzlin, B.; Leonhardt, S.; Ngo, C. Hybrid FES-Exoskeleton Control for Walking Gait Correction. Curr. Dir. Biomed. Eng. 2022, 8, 9–12. [Google Scholar] [CrossRef]
- Pan, M.; Yuan, C.; Liang, X.; Dong, T.; Liu, T.; Zhang, J.; Zou, J.; Yang, H.; Bowen, C. Soft Actuators and Robotic Devices for Rehabilitation and Assistance. Adv. Intell. Syst. 2022, 4, 2100140. Available online: http://xxx.lanl.gov/abs/https://onlinelibrary.wiley.com/doi/pdf/10.1002/aisy.202100140 (accessed on 1 March 2023). [CrossRef]
- Carvalho, A.D.D.R.; Karanth P, N.; Desai, V. Characterization of pneumatic muscle actuators and their implementation on an elbow exoskeleton with a novel hinge design. Sensors Actuators Rep. 2022, 4, 100109. [Google Scholar] [CrossRef]
- Gaylord, R.H. Fluid Actuated Motor System and Stroking Device. U.S. Patent 2,844,126, 22 July 1958. [Google Scholar]
- Paterna, M.; De Benedictis, C.; Ferraresi, C. The Research on Soft Pneumatic Actuators in Italy: Design Solutions and Applications. Actuators 2022, 11, 328. [Google Scholar] [CrossRef]
- Shahid, T.; Gouwanda, D.; Nurzaman, S.G.; Gopalai, A.A. Moving toward Soft Robotics: A Decade Review of the Design of Hand Exoskeletons. Biomimetics 2018, 3, 17. [Google Scholar] [CrossRef] [Green Version]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic Networks for Soft Robotics that Actuate Rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. Available online: http://xxx.lanl.gov/abs/https://onlinelibrary.wiley.com/doi/pdf/10.1002/adfm.201303288 (accessed on 1 March 2023). [CrossRef] [Green Version]
- Su, H.; Hou, X.; Zhang, X.; Qi, W.; Cai, S.; Xiong, X.; Guo, J. Pneumatic Soft Robots: Challenges and Benefits. Actuators 2022, 11, 92. [Google Scholar] [CrossRef]
- Ge, L.; Wang, T.; Zhang, N.; Gu, G. Fabrication of Soft Pneumatic Network Actuators with Oblique Chambers. J. Vis. Exp. 2018, 138, e58277. [Google Scholar]
- Rad, C.; Hancu, O.; Lapusan, C. Data-Driven Kinematic Model of PneuNets Bending Actuators for Soft Grasping Tasks. Actuators 2022, 11, 58. [Google Scholar] [CrossRef]
- Polygerinos, P.; Lyne, S.; Wang, Z.; Nicolini, L.F.; Mosadegh, B.; Whitesides, G.M.; Walsh, C.J. Towards a soft pneumatic glove for hand rehabilitation. In Proceedings of the Intelligent Robots and Systems (IROS), 2013 IEEE/RSJ International Conference, Las Vegas, NV, USA, 25–29 November 2013; pp. 1512–1517. [Google Scholar]
- Madgwick, S. An efficient orientation filter for inertial and inertial/magnetic sensor arrays. Rep. x-io Univ. Bristol 2010, 25, 113–118. [Google Scholar]
- Giakis, T.; Koufaki, I.; Metaxa, M.; Sideridou, A.; Thymniou, A.; Arfaras, G.; Antoniou, P.; Bamidis, P. Enhancing spatial ability through a virtual reality game for primary school children: “the wizard of upside down”: An experimental approach. In Proceedings of the Technology and Innovation in Learning, Teaching and Education, Vila Real, Portugal, 2–4 December 2020; Tsitouridou, M., Diniz, J.A., Mikropoulos, T.A., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 519–528. [Google Scholar]
- Antoniou, P.E.; Mpaka, M.; Dratsiou, I.; Aggeioplasti, K.; Tsitouridou, M.; Bamidis, P.D. Scoping the window to the universe: Design considerations and expert evaluation of an augmented reality mobile application for astronomy education. In Interactive Mobile Communication Technologies and Learning: Proceedings of the 11th IMCL Conference; Springer: Berlin/Heidelberg, Germany, 2018; pp. 409–420. [Google Scholar]
- Antoniou, P.; Dafli, E.; Arfaras, G.; Bamidis, P. Versatile mixed reality medical educational spaces; requirement analysis from expert users. Pers. Ubiquitous Comput. 2017, 21, 1–10. [Google Scholar] [CrossRef]
- Bamidis, P.; Antoniou, P.; Sidiropoulos, E. Using simulations and experiential learning approaches to train careers of seniors. In Proceedings of the 2014 IEEE 27th International Symposium on Computer-Based Medical Systems, Washington, DC, USA, 27–29 May 2014; pp. 119–124. [Google Scholar] [CrossRef]
- Antoniou, P.E.; Dafli, E.; Arfaras, G.; Bamidis, P.D. Versatile mixed reality educational spaces—A Medical education implementation case. In Proceedings of the 2016 15th International Conference on Ubiquitous Computing and Communications and 2016 International Symposium on Cyberspace and Security (IUCC-CSS), Granada, Spain, 14–16 December 2016; pp. 132–137. [Google Scholar] [CrossRef]
- Antoniou, P.; Bamidis, P. 3D printing and virtual and augmented reality in medicine and surgery: Tackling the content development barrier through co-creative approaches. In 3D Printing: Applications in Medicine and Surgery; Elsevier: Amsterdam, The Netherlands, 2022; pp. 77–99. [Google Scholar] [CrossRef]
- Antoniou, P.E.; Athanasiou, A.; Bamidis, P.D. Virtual and Augmented Reality in Neuroscience; Institution of Engineering and Technology: Stevenage, UK, 2020; pp. 69–96. [Google Scholar] [CrossRef]
- Athanasiou, A.; Antoniou, P.; Pandria, N.; Astaras, A.; Nizamis, K.; Mitsopoulos, K.; Praftsiotis, A.; Arvanitidis, T.; Apostolou, T.; Magras, I.; et al. Affect detection in rehabilitation using wearable robotics, multiple biosensors and serious gaming: A concept using the NeuroSuitUp platform. In Proceedings of the 4th International Conference on Medical Education Informatics, Kamakura, Japan, 12–15 July 2021. [Google Scholar]
- Mubin, O.; Alnajjar, F.; Al Mahmud, A.; Jishtu, N.; Alsinglawi, B. Exploring serious games for stroke rehabilitation: A scoping review. Disabil. Rehabil. Assist. Technol 2020, 17, 159–165. [Google Scholar] [CrossRef]
- Smisek, J.; Jancosek, M.; Pajdla, T. 3D with kinect. In Consumer Depth Cameras for Computer Vision: Research Topics and Applications; Fossati, A., Gall, J., Grabner, H., Ren, X., Konolige, K., Eds.; Springer: London, UK, 2013; pp. 3–25. [Google Scholar] [CrossRef]
- Fern’ndez-Baena, A.; Susin, A.; Lligadas, X. Biomechanical validation of upper-body and lower-body joint movements of kinect motion capture data for rehabilitation treatments. In Proceedings of the 2012 Fourth International Conference on Intelligent Networking and Collaborative Systems, Washington, DC, USA, 19–21 December 2012; pp. 656–661. [Google Scholar]
- Dubois, A.; Bresciani, J.P. Validation of an ambient system for the measurement of gait parameters. J. Biomech. 2018, 69, 175–180. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Sturm, J.; Cremers, D.; Lee, D. Real-time human motion tracking using multiple depth cameras. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Washington, DC, USA, 19–21 December 2012; pp. 2389–2395. [Google Scholar]
- Kurillo, G.; Hemingway, E.; Cheng, M.L.; Cheng, L. Evaluating the accuracy of the azure kinect and kinect v2. Sensors 2022, 22, 2469. [Google Scholar] [CrossRef]
- Carmeli, E.; Liebermann, D.G. Chapter 65—The function of the aging hand. In Geriatric Rehabilitation Manual, 2nd ed.; Kauffman, T.L., Barr, J.O., Moran, M., Eds.; Churchill Livingstone: Edinburgh, UK, 2007; pp. 435–438. [Google Scholar] [CrossRef]
- Konstantinidis, E.I.; Billis, A.; Bratsas, C.; Siountas, A.; Bamidis, P.D. Thessaloniki active and healthy ageing living lab: The roadmap from a specific project to a living lab towards openness. In Proceedings of the 9th ACM International Conference on PErvasive Technologies Related to Assistive Environments, Corfu Island, Greece, 29 June–1 July 2016; pp. 1–4. [Google Scholar]
- Bartneck, C.; Kulić, D.; Croft, E.; Zoghbi, S. Measurement Instruments for the Anthropomorphism, Animacy, Likeability, Perceived Intelligence, and Perceived Safety of Robots. Int. J. Soc. Robot. 2009, 1, 71–81. [Google Scholar] [CrossRef] [Green Version]
- Astaras, A.; Athanasiou, A.; Alexandrou, A.; Kartsidis, P.; Moustakas, N.; Bamidis, P. Double-blind greek translation and online implementation of the Godspeed robotics questionnaire. In Proceedings of the 6th Panhellenic Conference on Biomedical Technology Conference, Singapore, 26–29 June 2015; p. 34. [Google Scholar]
- Zijlstra, F.; Van Doorn, L. The Construction of a Scale to Measure Perceived Effort; University of Technology: Delft, The Netherlands, 1985. [Google Scholar]
- Sauro, J.; Dumas, J.S. Comparison of three one-question, post-task usability questionnaires. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Association for Computing Machinery, New York, NY, USA, 4 April 2009; pp. 1599–1608. [Google Scholar]
- Antoniou, P.E.; Arfaras, G.; Pandria, N.; Athanasiou, A.; Ntakakis, G.; Babatsikos, E.; Nigdelis, V.; Bamidis, P. Biosensor Real-Time Affective Analytics in Virtual and Mixed Reality Medical Education Serious Games: Cohort Study. JMIR Serious Games 2020, 8, e17823. [Google Scholar] [CrossRef] [PubMed]
- Mitsopoulos, K.; Terzopoulos, N.; Praftsiotis, A.; Antoniou, P.; Astaras, A.; Pandria, N.; Arvanitidis, A.; Athanasiou, A.; Magras, I.; Bamidis, P. Design of a wearable upper body rehabilitation modality based on kinematics & electromyography data, electrical muscle stimulation and serious game. Brain Spine 2021, 1, 100816. [Google Scholar] [CrossRef]
- Maciejasz, P.; Eschweiler, J.; Gerlach-Hahn, K.; Jansen-Troy, A.; Leonhardt, S. A survey on robotic devices for upper limb rehabilitation. J. Neuroeng. Rehabil. 2014, 11, 1–29. [Google Scholar] [CrossRef] [Green Version]
- Oña, E.D.; Garcia-Haro, J.M.; Jardón, A.; Balaguer, C. Robotics in health care: Perspectives of robot-aided interventions in clinical practice for rehabilitation of upper limbs. Appl. Sci. 2019, 9, 2586. [Google Scholar] [CrossRef] [Green Version]
- Vélez-Guerrero, M.A.; Callejas-Cuervo, M.; Mazzoleni, S. Artificial Intelligence-Based Wearable Robotic Exoskeletons for Upper Limb Rehabilitation: A Review. Sensors 2021, 21, 2146. [Google Scholar] [CrossRef] [PubMed]
- Koutsiana, E.; Ladakis, I.; Fotopoulos, D.; Chytas, A.; Kilintzis, V.; Chouvarda, I. Serious Gaming Technology in Upper Extremity Rehabilitation: Scoping Review. JMIR Serious Games 2020, 8, e19071. [Google Scholar] [CrossRef]
- Toledo-Peral, C.L.; Vega-Martínez, G.; Mercado-Gutiérrez, J.A.; Rodríguez-Reyes, G.; Vera-Hernández, A.; Leija-Salas, L.; Gutiérrez-Martínez, J. Virtual/Augmented Reality for Rehabilitation Applications Using Electromyography as Control/Biofeedback: Systematic Literature Review. Electronics 2022, 11, 2271. [Google Scholar] [CrossRef]
- Vourvopoulos, A.; Bermúdez I Badia, S. Motor priming in virtual reality can augment motor-imagery training efficacy in restorative brain-computer interaction: A within-subject analysis. J. Neuroeng. Rehabil. 2016, 13, 69. [Google Scholar] [CrossRef] [Green Version]
- Gorman, C.; Gustafsson, L. The use of augmented reality for rehabilitation after stroke: A narrative review. Disabil. Rehabil. Assist. Technol. 2022, 17, 409–417. [Google Scholar] [CrossRef] [PubMed]
- Barrett, A.; Oh-Park, M.; Chen, P.; Ifejika, N.L. Neurorehabilitation: Five new things. Neurol. Clin. Pract. 2013, 3, 484–492. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Langhorne, P.; Bernhardt, J.; Kwakkel, G. Stroke rehabilitation. Lancet 2011, 377, 1693–1702. [Google Scholar] [CrossRef]
- Mubin, O.; Alnajjar, F.; Jishtu, N.; Alsinglawi, B.; Al Mahmud, A. Exoskeletons with virtual reality, augmented reality, and gamification for stroke patients’ rehabilitation: Systematic review. JMIR Rehabil. Assist. Technol. 2019, 6, e12010. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krupinski, J.; Secades, J.; Shiraliyeva, R. Towards effective neurorehabilitation for stroke patients. Int. J. Phys. Med. Rehabil. 2014, 2, 2. [Google Scholar]
- Winstein, C.J.; Stein, J.; Arena, R.; Bates, B.; Cherney, L.R.; Cramer, S.C.; Deruyter, F.; Eng, J.J.; Fisher, B.; Harvey, R.L.; et al. Guidelines for adult stroke rehabilitation and recovery: A guideline for healthcare professionals from the American Heart Association/American Stroke Association. Stroke 2016, 47, e98–e169. [Google Scholar] [CrossRef]
- Pollock, A.; Baer, G.; Campbell, P.; Choo, P.L.; Forster, A.; Morris, J.; Pomeroy, V.M.; Langhorne, P. Physical rehabilitation approaches for the recovery of function and mobility following stroke. Cochrane Database Syst. Rev. 2014. [Google Scholar] [CrossRef] [Green Version]
- Lo, A.C.; Guarino, P.D.; Richards, L.G.; Haselkorn, J.K.; Wittenberg, G.F.; Federman, D.G.; Ringer, R.J.; Wagner, T.H.; Krebs, H.I.; Volpe, B.T.; et al. Robot-assisted therapy for long-term upper-limb impairment after stroke. N. Engl. J. Med. 2010, 362, 1772–1783. [Google Scholar] [CrossRef] [Green Version]
- Langhorne, P.; Coupar, F.; Pollock, A. Motor recovery after stroke: A systematic review. Lancet Neurol. 2009, 8, 741–754. [Google Scholar] [CrossRef]
- Mehrholz, J.; Thomas, S.; Kugler, J.; Pohl, M.; Elsner, B. Electromechanical-assisted training for walking after stroke. Cochrane Database Syst. Rev. 2020. [Google Scholar] [CrossRef]
- Marquez-Chin, C.; Popovic, M.R. Functional electrical stimulation therapy for restoration of motor function after spinal cord injury and stroke: A review. Biomed. Eng. Online 2020, 19, 1–25. [Google Scholar] [CrossRef]
- Prochazka, A. Motor neuroprostheses. Compr. Physiol. 2018, 9, 127–148. [Google Scholar]
- Foley, N.; Cotoi, A.; Serrato, J.; Mirkowski, M.; Harris, J.; Dukelow, S.; Sequeira, K.; Knutson, J.; Chae, J.; Teasell, R. Evidence-based review of stroke rehabilitation. Up. Extrem. Interv. Toronto Can. Stroke Netw. 2016. [Google Scholar]
- Kapadia, N.; Zivanovic, V.; Popovic, M. Restoring voluntary grasping function in individuals with incomplete chronic spinal cord injury: Pilot study. Top. Spinal Cord Inj. Rehabil. 2013, 19, 279–287. [Google Scholar] [CrossRef] [Green Version]
- Marquez-Chin, C.; Bagher, S.; Zivanovic, V.; Popovic, M.R. Functional electrical stimulation therapy for severe hemiplegia: Randomized control trial revisited: La simulation électrique fonctionnelle pour le traitement d’une hémiplégie sévère: Un essai clinique aléatoire revisité. Can. J. Occup. Ther. 2017, 84, 87–97. [Google Scholar] [CrossRef] [PubMed]
- Monte-Silva, K.; Piscitelli, D.; Norouzi-Gheidari, N.; Batalla, M.A.P.; Archambault, P.; Levin, M.F. Electromyogram-related neuromuscular electrical stimulation for restoring wrist and hand movement in poststroke hemiplegia: A systematic review and meta-analysis. Neurorehabilit. Neural Repair 2019, 33, 96–111. [Google Scholar] [CrossRef] [PubMed]
- Kimura, T.; Kaneko, F.; Iwamoto, E.; Saitoh, S.; Yamada, T. Neuromuscular electrical stimulation increases serum brain-derived neurotrophic factor in humans. Exp. Brain Res. 2019, 237, 47–56. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Exercise | Description | Task | Figure |
|---|---|---|---|
| Shoulder Coronal Abduction | To measure the extension of the arm on the shoulder joint, along the Coronal plane of the wearer. | Starting from the position designated as extends and releases their arm in the coronal plane close to and holds for ≈2 s, before returning to . |  |
| Shoulder Sagittal Abduction | To measure the extension of the arm on the shoulder joint, along the Sagittal plane of the wearer. | Starting from the position designated as extends and releases their arm in the sagittal plane, close to and holds for ≈2 s, before returning to . |  |
| Elbow Flexion/Extension | To measure the flexion and extension of the lower arm on the elbow joint, along the Coronal plane of the wearer. | Starting from the position designated as extends and releases their arm in the coronal plane, close to and holds for ≈2 s, before returning to . |  |
| Title | Description | Task | Figure |
|---|---|---|---|
| Cylindrical Grip | To assist the fingers curve around a cylinder shape, this grip combines extrinsic flexor action, lumbricals, and palmar interossei. | For ≈5 s the palm should contact the object with the thumb in direct opposition and abduction, then release. Wait for ≈10 s then repeat once again. |  |
| Spherical Grip | To curve around a circular item, the index, long, and ring fingers are abducted, while the thumb is opposed and abducted. | Grasp, squeeze for ≈5 s and then release a small ball. Wait for ≈10 s then repeat once again. |  |
| Lumbrical Grip | In this grip, the intrinsic muscles of the index, long, ring, and small fingers are most active, flexing the metacarpophalangeal joints to make contact with the object at the distal tips of the fingers and thumb. | For ≈5 s hold onto a flat object and then release. Wait for ≈10 s then repeat once again. |  |
| Subject | Exercise 1 | Exercise 2 | Exercise 3 |
|---|---|---|---|
| 1 | 0.99 | 0.86 | 0.09 |
| 2 | 0.93 | 0.73 | 0.99 |
| 3 | 0.95 | 0.84 | −0.68 |
| 4 | 0.91 | −0.03 | 0.98 |
| 5 | 0.95 | −0.19 | 0.96 |
| 6 | 0.98 | 0.01 | 0.85 |
| 7 | 0.99 | 0.59 | 0.90 |
| 8 | 0.98 | 0.53 | 0.90 |
| 9 | 0.91 | −0.55 | 0.97 |
| 10 | 0.98 | 0.50 | 0.98 |
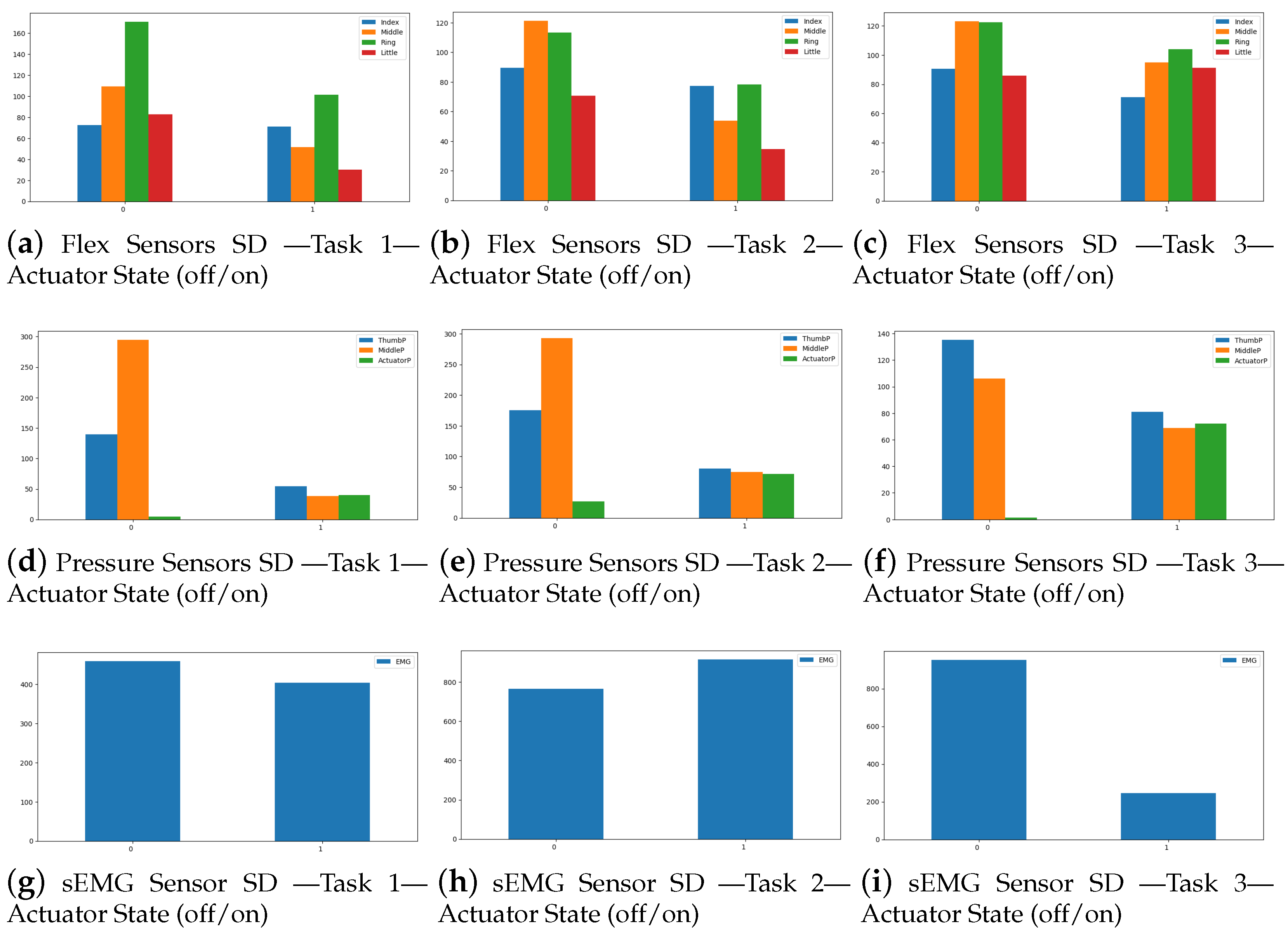
| Sensor | Placement | Task 1 | Task 2 | Task 3 | |||
|---|---|---|---|---|---|---|---|
| Off | On | Off | On | Off | On | ||
| Flex | Index | 72.37 | 70.82 | 89.53 | 77.39 | 90.72 | 71.13 |
| Middle | 109.34 | 51.68 | 121.25 | 53.68 | 123.15 | 94.95 | |
| Ring | 170.56 | 101.27 | 113.26 | 78.32 | 122.62 | 104.04 | |
| Little | 82.67 | 30.21 | 70.57 | 34.79 | 85.84 | 91.33 | |
| Pressure | Thumb | 139.96 | 54.47 | 175.09 | 80.59 | 135.21 | 80.87 |
| Middle Tip | 294.67 | 38.37 | 292.70 | 75.04 | 106.14 | 68.74 | |
| Middle Top | 4.37 | 40.10 | 26.92 | 71.84 | 1.49 | 72.34 | |
| EMG | Extensor muscle | 458.37 | 403.14 | 764.73 | 914.48 | 951.93 | 245.63 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mitsopoulos, K.; Fiska, V.; Tagaras, K.; Papias, A.; Antoniou, P.; Nizamis, K.; Kasimis, K.; Sarra, P.-D.; Mylopoulou, D.; Savvidis, T.; et al. NeuroSuitUp: System Architecture and Validation of a Motor Rehabilitation Wearable Robotics and Serious Game Platform. Sensors 2023, 23, 3281. https://doi.org/10.3390/s23063281
Mitsopoulos K, Fiska V, Tagaras K, Papias A, Antoniou P, Nizamis K, Kasimis K, Sarra P-D, Mylopoulou D, Savvidis T, et al. NeuroSuitUp: System Architecture and Validation of a Motor Rehabilitation Wearable Robotics and Serious Game Platform. Sensors. 2023; 23(6):3281. https://doi.org/10.3390/s23063281
Chicago/Turabian StyleMitsopoulos, Konstantinos, Vasiliki Fiska, Konstantinos Tagaras, Athanasios Papias, Panagiotis Antoniou, Konstantinos Nizamis, Konstantinos Kasimis, Paschalina-Danai Sarra, Diamanto Mylopoulou, Theodore Savvidis, and et al. 2023. "NeuroSuitUp: System Architecture and Validation of a Motor Rehabilitation Wearable Robotics and Serious Game Platform" Sensors 23, no. 6: 3281. https://doi.org/10.3390/s23063281