
LP-OPTIMA: A Framework for Prescriptive Maintenance and Optimization of IoT Resources for Low-Power Embedded Systems

 ,
,  , , and
, , and
Abstract
:1. Introduction
- A bifold procedure, leveraging available data streams to identify potential malfunctions in low-power embedded systems;
- A proactive stance in handling potential malfunctions by implementing corrective measures;
- The proposal of a prescriptive maintenance strategy that includes periodic prescriptions to address and mitigate issues before they escalate;
- A novel resource optimization framework;
- The integration of user activities into the resource management framework enhances the overall usability and adaptability of low-power embedded systems.
2. Related Work
3. Methodology
3.1. Architecture and Dependencies of Autonomous, Low-Power Embedded Systems
- HardFault. Generic fault conditions existing for all classes of fault that cannot be handled by any of the other exception mechanisms. Typically, it is used for unrecoverable system failures
- MemManage. handles memory protection faults that are determined by the memory protection unit (MPU) or by fixed memory protection constraints for both instruction and data memory transactions.
- BusFault handles memory-related faults, other than those handled by the MemManage fault, for both instruction and data memory transactions. Typically, these faults arise from errors detected on the system buses.
- UsageFault. handles non-memory-related faults caused by instruction execution. A number of different situations cause usage faults, including undefined instruction, invalid state on instruction execution, error on exception return, word or halfword memory accesses to an unaligned address, or division by zero.
3.1.1. STM32L496VG MCU
- Power reset
- System reset
- Backup domain reset
3.1.2. STM32H743VG MCU
- Power-on/off reset
- System reset
- Local resets
3.1.3. STM32U5A5VJT MCU
3.2. Resource Management
3.3. Data Control Mechanism
3.4. Periodic Controller
3.5. Malfunction Detection
3.5.1. Autoencoder
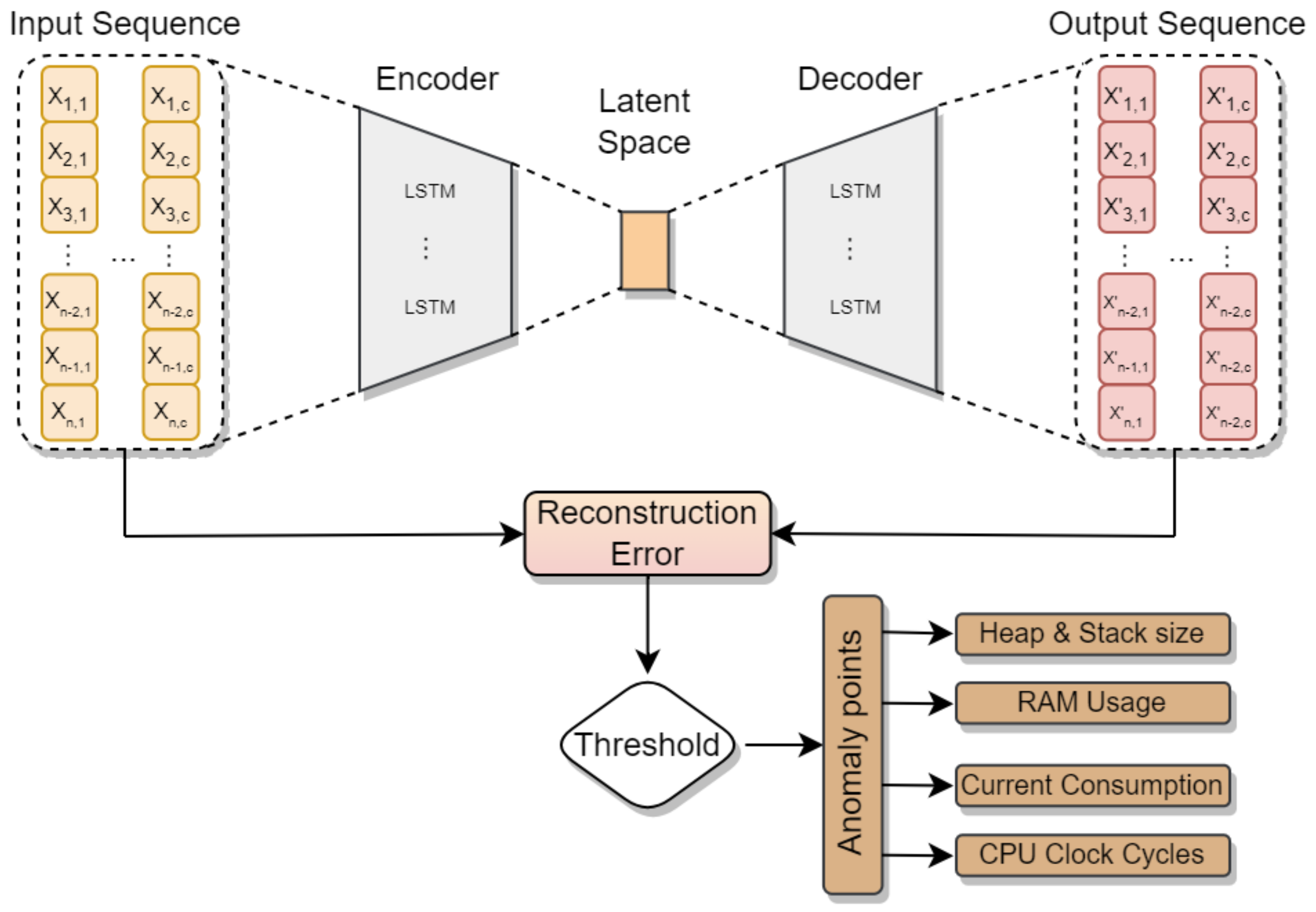
3.5.2. AE-LSTM
3.5.3. Implementation of AE in Low-Power Embedded Systems
4. Experimental Results
4.1. Experiment Setup and Results
4.2. Data Set
4.2.1. Real Data
4.2.2. Simulated
- Heap and Stack Size Error: In this scenario, the application encounters a heap and stack size error when the allocated memory during runtime exceeds the available heap space. Additionally, errors occur when the stack overflows due to extensive nesting of function calls or because of sensor input, such as receiving false values from a sensor.
- RAM Usage: In this scenario, errors occur in monitoring RAM usage when free allocated memory is not executed properly or is missing. Additionally, buffer overflows in pointers lead to the same problem with RAM usage.
- Current Consumption: In this scenario, an error occurs in current consumption when a damaged temperature sensor (BME 680) is connected to the platform.
- CPU Cycle Count: In this scenario, stack overflow is induced by recursive function calls, leading to a deviation between the normal CPU cycle count and the simulated situation. This discrepancy indicates the occurrence of an error in the system.
4.3. Results
4.3.1. Malfunction Detection Results
4.3.2. Evaluation in the Embedded Systems
4.4. System Requirements and Constraints
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ye, L.; Wang, Z.; Liu, Y.; Chen, P.; Li, H.; Zhang, H.; Wu, M.; He, W.; Shen, L.; Zhang, Y.; et al. The challenges and emerging technologies for low-power artificial intelligence IoT systems. IEEE Trans. Circuits Syst. Regul. Pap. 2021, 68, 4821–4834. [Google Scholar] [CrossRef]
- Souza Junior, M.E.T.; Freitas, L.C.G. Power electronics for modern sustainable power systems: Distributed generation, microgrids and smart grids—A review. Sustainability 2022, 14, 3597. [Google Scholar] [CrossRef]
- Dhanagopal, R.; Muthukumar, B. A model for low power, high speed and energy efficient early landslide detection system using IoT. Wirel. Pers. Commun. 2021, 117, 2713–2728. [Google Scholar] [CrossRef]
- Nurelmadina, N.; Hasan, M.K.; Memon, I.; Saeed, R.A.; Zainol Ariffin, K.A.; Ali, E.S.; Mokhtar, R.A.; Islam, S.; Hossain, E.; Hassan, M.A. A systematic review on cognitive radio in low power wide area network for industrial IoT applications. Sustainability 2021, 13, 338. [Google Scholar] [CrossRef]
- Xie, H.; Jiang, M.; Zhang, D.; Goh, H.H.; Ahmad, T.; Liu, H.; Liu, T.; Wang, S.; Wu, T. IntelliSense technology in the new power systems. Renew. Sustain. Energy Rev. 2023, 177, 113229. [Google Scholar] [CrossRef]
- Vitolo, P.; De Vita, A.; Di Benedetto, L.; Pau, D.; Licciardo, G.D. Low-power detection and classification for in-sensor predictive maintenance based on vibration monitoring. IEEE Sens. J. 2022, 22, 6942–6951. [Google Scholar] [CrossRef]
- Ratnam, K.S.; Palanisamy, K.; Yang, G. Future low-inertia power systems: Requirements, issues, and solutions-A review. Renew. Sustain. Energy Rev. 2020, 124, 109773. [Google Scholar] [CrossRef]
- Milano, F.; Dörfler, F.; Hug, G.; Hill, D.J.; Verbič, G. Foundations and challenges of low-inertia systems. In Proceedings of the 2018 Power Systems Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2018; pp. 1–25. [Google Scholar]
- Liu, J.; Gao, W.; Dong, J.; Wu, N.; Ding, F. Low-Power Failure Detection for Environmental Monitoring Based on IoT. Sensors 2021, 21, 6489. [Google Scholar] [CrossRef] [PubMed]
- Chauhan, P.; Gupta, S. Challenges and Future Perspectives of Low-Power VLSI Circuits: A Study. In Modern Electronics Devices and Communication Systems: Select Proceedings of MEDCOM 2021; Springer: Berlin/Heidelberg, Germany, 2023; pp. 561–569. [Google Scholar]
- Dimara, A.; Vasilopoulos, V.G.; Papaioannou, A.; Angelis, S.; Kotis, K.; Anagnostopoulos, C.N.; Krinidis, S.; Ioannidis, D.; Tzovaras, D. Self-healing of semantically interoperable smart and prescriptive edge devices in IoT. Appl. Sci. 2022, 12, 11650. [Google Scholar] [CrossRef]
- Papaioannou, A.; Dimara, A.; Michailidis, I.; Stefanopoulou, A.; Karatzinis, G.; Krinidis, S.; Anagnostopoulos, C.N.; Kosmatopoulos, E.; Ioannidis, D.; Tzovaras, D. Self-protection of IoT Gateways Against Breakdowns and Failures Enabling Automated Sensing and Control. In Proceedings of the IFIP International Conference on Artificial Intelligence Applications and Innovations, León, Spain, 14–17 June 2023; Springer: Berlin/Heidelberg, Germany, 2023; pp. 231–241. [Google Scholar]
- Franco, I.T.; de Figueiredo, R.M. Predictive Maintenance: An Embedded System Approach. J. Control Autom. Electr. Syst. 2023, 34, 60–72. [Google Scholar] [CrossRef]
- Hu, W.; Zhou, L.; Du, J.; Li, S.; Kong, C. Mine motor predictive maintenance monitoring equipment and algorithm design based on STM32. In Proceedings of the 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 11–13 December 2020; Volume 9, pp. 1845–1849. [Google Scholar]
- Huang, M.T.; Li, S.; Xue, Y.; Li, S.Y. Design of embedded hardware platform for predictive maintenance of coal mine reducer. In Proceedings of the 2020 5th International Conference on Mechanical, Control and Computer Engineering (ICMCCE), Harbin, China, 25–27 December 2020; pp. 1079–1082. [Google Scholar]
- Kouzinopoulos, C.S.; Tzovaras, D.; Bembnowicz, P.; Meli, M.; Bellanger, M.; Kauer, M.; De Vos, J.; Pasero, D.; Schellenberg, M.; Vujicic, O. AMANDA: An autonomous self-powered miniaturized smart sensing embedded system. In Proceedings of the 2019 IEEE 9th International Conference on Consumer Electronics (ICCE-Berlin), Berlin, Germany, 8–11 September 2019; pp. 324–329. [Google Scholar]
- Meli, M.; Brütsch, M.; Stajic, S.; Böbel, M.; Lorenz, D.; Hegetschweiler, L.; Karanassos, D.; Kouzinopoulos, C.S. Low light energy autonomous LoRaWAN node. In Proceedings of the 2020 IEEE 5th International Symposium on Smart and Wireless Systems within the Conferences on Intelligent Data Acquisition and Advanced Computing Systems (IDAACS-SWS), Dortmund, Germany, 17–18 September 2020; pp. 1–6. [Google Scholar]
- La Rosa, R.; Dehollain, C.; Burg, A.; Costanza, M.; Livreri, P. An energy-autonomous wireless sensor with simultaneous energy harvesting and ambient light sensing. IEEE Sens. J. 2021, 21, 13744–13752. [Google Scholar] [CrossRef]
- La Rosa, R.; Dehollain, C.; Costanza, M.; Speciale, A.; Viola, F.; Livreri, P. A Battery-Free Wireless Smart Sensor platform with Bluetooth Low Energy Connectivity for Smart Agriculture. In Proceedings of the 2022 IEEE 21st Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 14–16 June 2022; pp. 554–558. [Google Scholar]
- Sidibe, A.; Loubet, G.; Takacs, A.; Dragomirescu, D. A multifunctional battery-free bluetooth low energy wireless sensor node remotely powered by electromagnetic wireless power transfer in far-field. Sensors 2022, 22, 4054. [Google Scholar] [CrossRef] [PubMed]
- ARMv7-M Architecture Reference Manual. Available online: https://developer.arm.com/documentation/ddi0403/ed/ (accessed on 5 February 2024).
- ARMv8-M Architecture Reference Manual. Available online: https://developer.arm.com/documentation/ddi0553/latest/ (accessed on 5 February 2024).
- STMicroelectronics RM0351 Reference Manual. Available online: https://www.st.com/resource/en/reference_manual/rm0351-stm32l47xxx-stm32l48xxx-stm32l49xxx-and-stm32l4axxx-advanced-armbased-32bit-mcus-stmicroelectronics.pdf (accessed on 5 February 2024).
- STMicroelectronics PM0214 Programming Manual. Available online: https://www.st.com/resource/en/programming_manual/pm0214-stm32-cortexm4-mcus-and-mpus-programming-manual-stmicroelectronics.pdf (accessed on 5 February 2024).
- STMicroelectronics RM0433 Reference Manual. Available online: https://www.st.com/resource/en/reference_manual/dm00314099-stm32h742-stm32h743-753-and-stm32h750-value-line-advanced-arm-based-32-bit-mcus-stmicroelectronics.pdf (accessed on 5 February 2024).
- STMicroelectronics RM0456 Reference Manual. Available online: https://www.st.com/resource/en/reference_manual/rm0456-stm32u5-series-armbased-32bit-mcus-stmicroelectronics.pdf (accessed on 8 February 2024).
- wolfBoot Secure Bootloader. Available online: https://www.wolfssl.com/products/wolfboot/ (accessed on 8 February 2024).
- Staudemeyer, R.C.; Morris, E.R. Understanding LSTM–a tutorial into long short-term memory recurrent neural networks. arXiv 2019, arXiv:1909.09586. [Google Scholar]
- Nguyen, H.D.; Tran, K.P.; Thomassey, S.; Hamad, M. Forecasting and Anomaly Detection approaches using LSTM and LSTM Autoencoder techniques with the applications in supply chain management. Int. J. Inf. Manag. 2021, 57, 102282. [Google Scholar] [CrossRef]
- Al-Jamali, N.A.S.; Al-Saedi, I.R.; Zarzoor, A.R.; Li, H. A new imputation technique based a multi-Spike Neural Network to handle missing data in the Internet of Things Network (IoT). IEEE Access 2023, 11, 112841–112850. [Google Scholar] [CrossRef]
- Mamat, N.; Razali, S.M. Comparisons of various imputation methods for incomplete water quality data: A case study of the langat river, Malaysia. J. Kejuruter. 2023, 35, 191–201. [Google Scholar] [CrossRef] [PubMed]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- TensorFlow. TensorFlow Lite Models: Convert RNN. Available online: https://www.tensorflow.org/lite/models/convert/rnn (accessed on 8 February 2024).
- Papaioannou, A.; Kouzinopoulos, C.S.; Ioannidis, D.; Tzovaras, D. An Ultra-low-power Embedded AI Fire Detection and Crowd Counting System for Indoor Areas. ACM Trans. Embed. Comput. Syst. 2023, 22, 1–20. [Google Scholar] [CrossRef]
- X-CUBE AI Module from STM. Available online: https://www.st.com/en/embedded-software/x-cube-ai.html (accessed on 6 February 2024).
- Texas Instruments. INA219 Datasheet; Texas Instruments: Dallas, TX, USA, 2015. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Work | Embedded System | Low Power | Maintenance Strategy | Monitoring Level | Detection Method |
|---|---|---|---|---|---|
| [11] | Rpi | NO | Prescriptive | Embedded system Sensor nodes | LSTM |
| [12] | Rpi | NO | Prescriptive | Embedded system Sensor nodes | LSTM |
| [13] | Rpi | NO | Predictive | Sensor nodes | Random Forest |
| [14] | Custom | YES | None | Embedded system | Butterworth filter, FFT and envelope Spectrum analysis |
| [15] | Custom | YES | None | Embedded system | Butterworth filter, FFT and envelope spectrum analysis |
| This work | Custom | YES | Prescriptive | Embedded system Sensor nodes Integrated sensors | AE-LSTM |
| Model | Core | Frequency | Flash | RAM | Shutdown | Standby | Stop | Run |
|---|---|---|---|---|---|---|---|---|
| STM32L496VG | Cortex-M4 | 80 MHz | 1 MB | 320 KB | 25 nA | 108 nA | 2.57 A | 91 A/MHz (LDO) 37 A/MHz (SMPS) |
| STM32H743VG | Cortex-M7 | 480 MHz | 2 MB | 1 MB | - | 2.95 A | 290 nA | 275 A/MHz |
| STM32U5A5VJT | Cortex-M33 | 160 MHz | 4 MB | 2.5 MB | 150 nA | 195 nA | 2 A | 18.5 A/MHz |
| Number | Malfunction/Issue | Type | Prescription |
|---|---|---|---|
| dcm1 | Over current consumption threshold | ACT | System reset |
| dcm2 | Over current consumption threshold after restart | MSG | {“alertType”: “System Alert”, “message”: “Overcurrent Threshold Exceeded After Restart. Please check”.} |
| dcm3 | No connection to sensor node | ACT | System reset |
| dcm4 | No connection to sensor component | ACT | System reset |
| dcm5 | No connection to sensor node after restart | MSG | {“alertType”: “System Alert”, “message”: “No connection to sensor node A after restart. Please check”.} |
| dcm6 | No connection to integrated sensor after restart | MSG | {“alertType”: “System Alert”, “message”: “No connection to integrated sensor A after restart. Please check”.} |
| dcm7 | Erratic behavior or data corruption | MSG | {“alertType”: “System Alert”, “message”: “System voltage too low. Increase voltage!”} |
| dcm8 | Drops in the power supply voltage below threshold | ACT | System reset |
| dcm9 | Restart due to BOR | MSG | {“alertType”: “System Alert”, “message”: “System restarted. Data corruption prevented!”} |
| dcm10 | Error during execution of System software (UsageFault) | MSG | {“alertType”: “System Alert”, “message”: “System restarted. Error prevented”.} |
| dcm11 | Bus Memory fault (BusFault) | MSG | {“alertType”: “System Alert”, “message”: “System memory fault. Check firmware or data execution”} |
| dcm12 | Bus Memory access violation (MemManage) | MSG | {“alertType”: “System Alert”, “message”: “SMemory access violation. Please check firmware”.} |
| dcm13 | Bus unrecoverable system failures (HardFault) | MSG | {“alertType”: “System Alert”, “message”: “System restarted due to unrecoverable error. Please check!”} |
| Description | Type | Frequency | Prescription |
|---|---|---|---|
| pc1 | ACT | Monthly | Software reset to maintain system stability. |
| pc2 | MSG | Biannual | {“alertType”: “Prescription”, “message”: “Periodic system update and upgrade scheduled. Please prepare for the process”.} |
| pc3 | MSG | Variable | {“alertType”: “Prescription”, “message”: “Please update you system”.} |
| pc4 | ACT | Monthly | wolfBoot |
| pc5 | MSG | Monthly | {“alertType”: “Prescription”, “message”: “Periodic system update performed”.} |
| Code | Malfunction/Issue | Prescription Type | Prescription |
|---|---|---|---|
| md1 | Insufficient Heap and Stack Memory | MSG | {“alertType”: “System Alert”, “msg”: “Insufficient Heap and Stack Memory detected. Please check and optimize.”} |
| md2 | Low RAM Availability | MSG | {“alertType”: “System Alert”, “msg”: “Low RAM detected. Please check and optimize”.} |
| md3 | High Current Power | MSG | {“alertType”: “System Alert”, “msg”: “High Current Power Consumption. Please check sensors”.} |
| md4 | Unusual CPU Cycle Count | MSG | {“alertType”: “System Alert”, “msg”: “Unusual CPU Cycle Count. Please check and optimize”.} |
| sc1 | sc2 | sc3 | sc4 | |
|---|---|---|---|---|
| Descr. | Function call nesting or overflow is occurred due to input of a sensor | Uninitialized variables or buffer overflows | Unexpected power-related issues | Count deviating from expected clock cycle values |
| Possible Causes | • Dynamic memory aaallocation • Recursive function calls | • Failure to free aaallocated memory • Buffer overflows in aaarrays or pointers | • Incorrect peripheral aaor sensor configurations • Hardware issues | • Recursive function calls • Incorrectly configured aainterrupt priorities |
| Features Affects | Heap and Stack memory | Ram Usage | Power Consumption | CPU Cycle Count |
| Confidence Value | Model | Precision | Recall | Accuracy | F1 Score | MACC |
|---|---|---|---|---|---|---|
| k = 6 | AE-Dense (1-1) | 0.919 | 0.985 | 0.964 | 0.955 | 420 |
| AE-Dense (2-2) | 0.925 | 0.998 | 0.978 | 0.965 | 1636 | |
| AE-LSTM (1-1) | 0.940 | 0.998 | 0.978 | 0.965 | 3556 | |
| AE-LSTM (2-2) | 0.945 | 0.998 | 0.997 | 0.974 | 16,484 | |
| nu = 0.005 | OC-SVM | 0.918 | 0.945 | 0.956 | 0.945 | 45,267 |
| Contamination = 0.002 | IF | 0.915 | 0.935 | 0.946 | 0.935 | 1144 |
| k=7 | AE-Dense (1-1) | 0.949 | 0.985 | 0.965 | 0.974 | 420 |
| AE-Dense (2-2) | 0.949 | 0.985 | 0.965 | 0.974 | 1636 | |
| AE-LSTM (1-1) | 0.965 | 0.998 | 0.998 | 0.984 | 3556 | |
| AE-LSTM (2-2) | 0.975 | 0.998 | 0.998 | 0.990 | 16,484 | |
| nu = 0.05 | OC-SVM | 0.938 | 0.955 | 0.966 | 0.956 | 45,267 |
| Contamination = 0.003 | IF | 0.935 | 0.955 | 0.955 | 0.945 | 1144 |
| k = 8 | AE-Dense (1-1) | 0.949 | 0.985 | 0.965 | 0.974 | 420 |
| AE-Dense (2-2) | 0.955 | 0.995 | 0.965 | 0.979 | 1636 | |
| AE-LSTM (1-1) | 0.985 | 0.998 | 0.998 | 0.985 | 3556 | |
| AE-LSTM (2-2) | 0.985 | 0.999 | 0.999 | 0.990 | 16,484 | |
| nu = 0.08 | OC-SVM | 0.955 | 0.965 | 0.975 | 0.965 | 45,267 |
| Contamination = 0.005 | IF | 0.950 | 0.960 | 0.965 | 0.955 | 1144 |
| Platform | Model | Proc Time (ms) | Flash Memory Occupied (%) | Ram Memory Occupied (%) | Current Power Consumption (mA) | Energy (mJ) |
|---|---|---|---|---|---|---|
| L4 | Dense AE (1-1) | 1.328 ms | 1.047% (10.73 KB) | 0.359% (1.56 KB) | 0.635 mA | 8.4 × mJ |
| Dense AE (2-2) | 4.168 ms | 1.585% (16.24 KB) | 1.996% (6.39 KB) | 0.635 mA | 0.003 mJ | |
| AE LSTM (1-1) | 17.829 ms | 3.208% (32.85 KB) | 0.925% (2.93 KB) | 0.655 mA | 0.038 mJ | |
| AE LSTM (2-2) | 61.866 ms | 8.287% (84.86 KB) | 1.428% (4.57 KB) | 0.657 mA | 0.131 mJ | |
| OC-SVM | 83.832 ms | 12.061% (123.51 KB) | 0.387% (1.24 KB) | 0.687 mA | 0.231 mJ | |
| IF | 3.547 ms | 4.474% (45.83 KB) | 0.400% (1.28 KB) | 0.697 mA | 0.008 mJ | |
| H7 | Dense AE (1-1) | 1.172 ms | 0.536% (10.73 KB) | 0.151% (1.56 KB) | 4.812 mA | 0.005 mJ |
| Dense AE (2-2) | 3.354 ms | 0.812% (16.24 KB) | 0.620% (6.39 KB) | 4.821 mA | 0.016 mJ | |
| AE LSTM (1-1) | 13.2 ms | 1.642% (32.85 KB) | 0.284% (2.93 KB) | 4.853 mA | 0.215 mJ | |
| AE LSTM (2-2) | 47.2 ms | 4.243% (84.86 KB) | 0.443% (4.57 KB) | 4.876 mA | 0.668 mJ | |
| OC-SVM | 77.458 ms | 6.175% (123.51 KB) | 0.120% (1.24 KB) | 4.878 mA | 1.211 mJ | |
| IF | 3.174 ms | 2.293% (45.82 KB) | 0.124% (1.28 KB) | 4.865 mA | 0.015 mJ | |
| U5 | Dense AE (1-1) | 1.271 ms | 0.268% (10.73 KB) | 0.063% (1.56 KB) | 0.685 mA | 7.5 × mJ |
| Dense AE (2-2) | 3.816 ms | 0.406% (16.24 KB) | 0.260% (6.39 KB) | 0.685 mA | 0.008 mJ | |
| AE LSTM (1-1) | 17.032 ms | 0.821% (32.85 KB) | 0.119% (2.93 KB) | 0.689 mA | 0.039 mJ | |
| AE LSTM (2-2) | 58.28 ms | 2.121% (84.86 KB) | 0.186% (4.57 KB) | 0.674 mA | 0.140 mJ | |
| OC-SVM | 74.245 ms | 3.082% (123.51 KB) | 0.051% (1.24 KB) | 0.679 mA | 0.185 mJ | |
| IF | 3.654 ms | 1.143% (45.83 KB) | 0.052% (1.28 KB) | 0.670 mA | 0.008 mJ |
| Platform | Layers | Proc Time (ms) | Energy (mJ) |
|---|---|---|---|
| L4 | AE-LSTM (1-1) | 17.829 ms | 0.038 mJ |
| • Encoder 1st LSTM | 8.076 ms | 0.017 mJ | |
| • Decoder 1st LSTM | 9.143 ms | 0.020 mJ | |
| • Intermediate nodes | 0.609 ms | 0.001 mJ | |
| H7 | AE-LSTM (1-1) | 13.2 ms | 0.215 mJ |
| • Encoder 1st LSTM | 6.095 ms | 0.096 mJ | |
| • Decoder 1st LSTM | 6.681 ms | 0.113 mJ | |
| • Intermediate nodes | 0.461 ms | 0.006 mJ | |
| U5 | AE-LSTM (1-1) | 17.032 ms | 0.039 mJ |
| • Encoder 1st LSTM | 7.715 ms | 0.018 mJ | |
| • Decoder 1st LSTM | 8.734 ms | 0.020 mJ | |
| • Intermediate nodes | 0.582 ms | 0.001 mJ |
| Metric/Platform | STM32L496VG (L4-Baseline) | STM32H743VG (H7) | STM32U5A5VJT (U5) |
|---|---|---|---|
| Processor Core | Cortex-M4 | Cortex-M7 | Cortex-M33 |
| Frequency | 80 MHz | 480 MHz | 160 MHz |
| Flash Memory | 1 MB | 2 MB | 4 MB |
| RAM | 320 KB | 1 MB | 2.5 MB |
| Processing Time (ms) | 17.829 | 13.2 | 17.032 |
| Flash Memory Occupied (%) | 3.208% | 1.642% | 0.821% |
| RAM Occupied (%) | 0.925% | 0.284% | 0.119% |
| Current Power Consumption (mA) | 0.655 | 4.853 | 0.689 |
| Energy (mJ) | 0.038 | 0.215 | 0.039 |
| Performance Insight | Optimal balance between performance and resource usage. Suitable for real-time applications with constrained resources. | Enhanced performance with increased power usage. Suitable for applications requiring faster processing and higher reliability. | Efficient energy use with minimal resource occupancy, demonstrating scalability to more powerful systems without significant energy cost. |
| Constraints | - Max energy: 0.04 mJ - Min processing speed: 15 ms - Max flash occupancy: 4% - Max RAM occupancy: 1% | - Max energy: 0.22 mJ - Min processing speed: 10 ms - Max flash occupancy: 2% - Max RAM occupancy: 0.3% | - Max energy: 0.04 mJ - Min processing speed: 15 ms - Max flash occupancy: 1% - Max RAM occupancy 0.2% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papaioannou, A.; Dimara, A.; Kouzinopoulos, C.S.; Krinidis, S.; Anagnostopoulos, C.-N.; Ioannidis, D.; Tzovaras, D. LP-OPTIMA: A Framework for Prescriptive Maintenance and Optimization of IoT Resources for Low-Power Embedded Systems. Sensors 2024, 24, 2125. https://doi.org/10.3390/s24072125
Papaioannou A, Dimara A, Kouzinopoulos CS, Krinidis S, Anagnostopoulos C-N, Ioannidis D, Tzovaras D. LP-OPTIMA: A Framework for Prescriptive Maintenance and Optimization of IoT Resources for Low-Power Embedded Systems. Sensors. 2024; 24(7):2125. https://doi.org/10.3390/s24072125
Chicago/Turabian StylePapaioannou, Alexios, Asimina Dimara, Charalampos S. Kouzinopoulos, Stelios Krinidis, Christos-Nikolaos Anagnostopoulos, Dimosthenis Ioannidis, and Dimitrios Tzovaras. 2024. "LP-OPTIMA: A Framework for Prescriptive Maintenance and Optimization of IoT Resources for Low-Power Embedded Systems" Sensors 24, no. 7: 2125. https://doi.org/10.3390/s24072125