
Measurements of Spatial Angles Using Diamond Nitrogen–Vacancy Center Optical Detection Magnetic Resonance
 , , ,
, , ,
Abstract
:1. Introduction
2. Experimental Principles
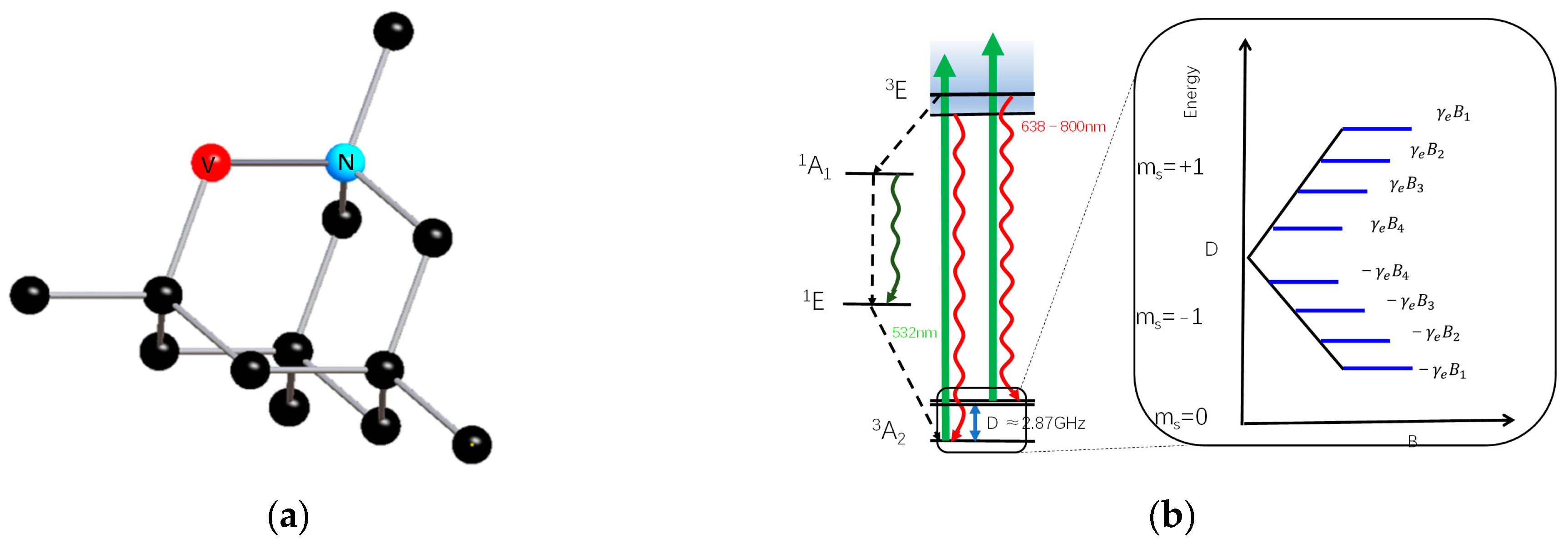
2.1. Magnetic Field Detection Based on ODMR
2.2. Magnetic Field Angle Detection Method
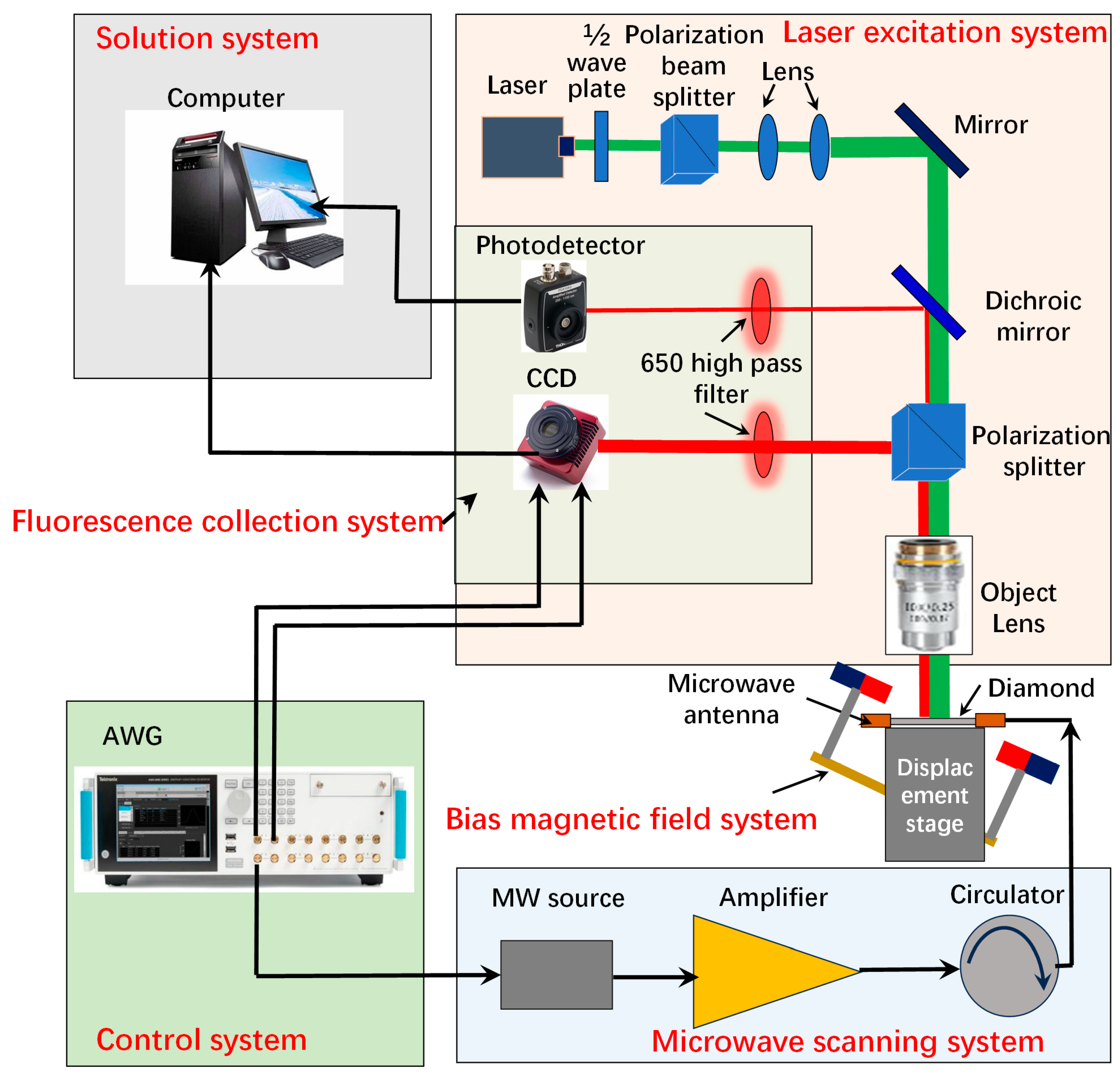
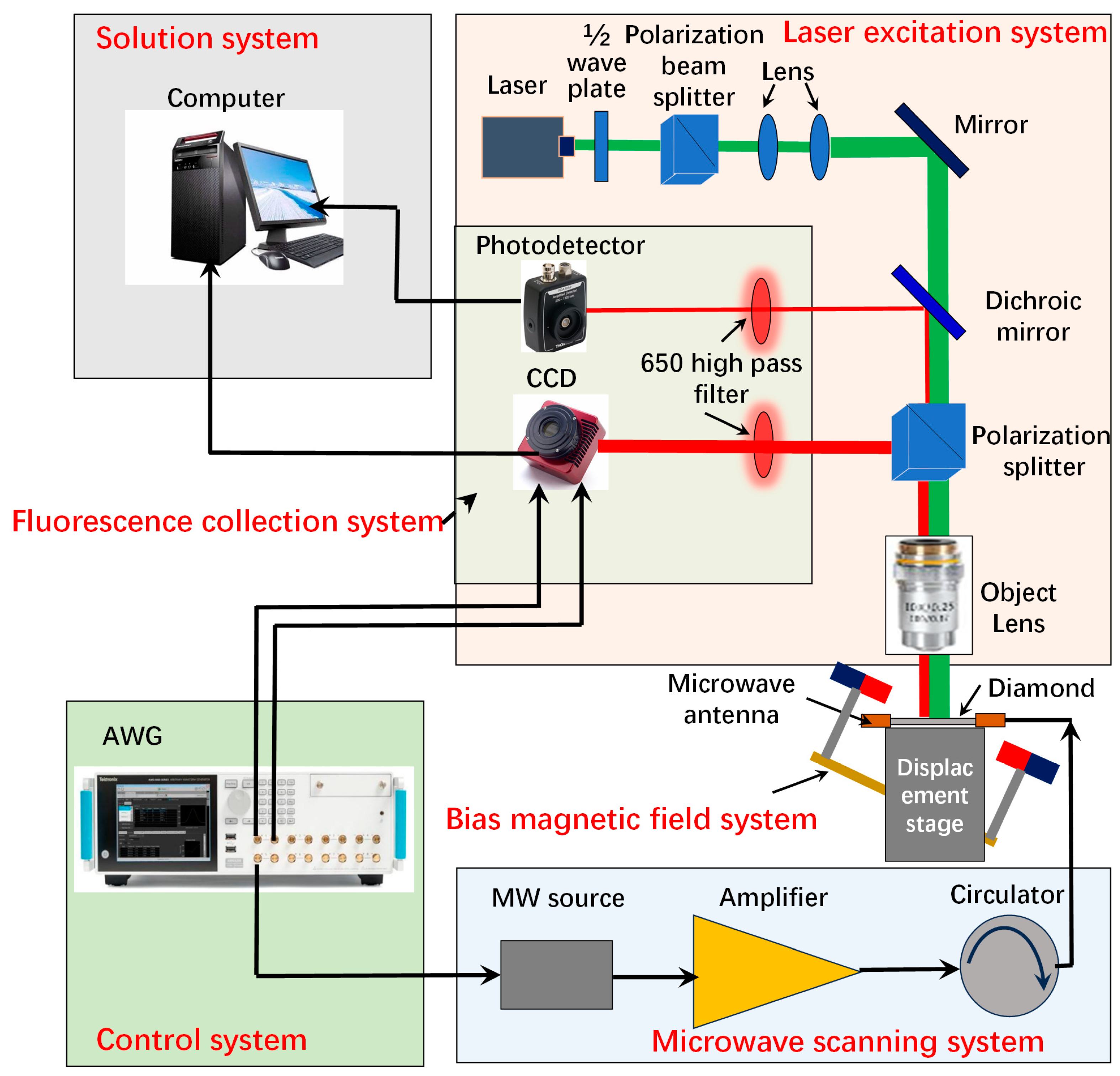
3. Experimental Apparatus
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, W.; Wu, S.; Zhang, H.; Zhang, X.; Zhuang, J.; Hu, C.; Liu, Y.; Lei, B.; Ma, L.; Wang, X. Enhanced Biological Photosynthetic Efficiency Using Light–Harvesting Engineering with Dual–Emissive Carbon Dots. Adv. Funct. Mater. 2018, 28, 1804004. [Google Scholar] [CrossRef]
- Ding, Y.; Li, Z.; Liu, C.; Kang, Z.; Sun, M.; Sun, J.; Chen, L. Ballistic Coefficient Calculation Based on Optical Angle Measurements of Space Debris. Sensors 2023, 23, 7668. [Google Scholar] [CrossRef] [PubMed]
- Cruz, J.; Gonçalves, S.B.; Neves, M.C.; Silva, H.P.; Silva, M.T. Intraoperative Angle Measurement of Anatomical Structures: A Systematic Review. Sensors 2024, 24, 1613. [Google Scholar] [CrossRef] [PubMed]
- Talkington, S.; Turizo, D.; Grijalva, S.; Fernandez, J.; Molzahn, D.K. Conditions for Estimation of Sensitivities of Voltage Magnitudes to Complex Power Injections. IEEE Trans. Power Syst. 2024, 39, 478–491. [Google Scholar] [CrossRef]
- Butterfass, J.; Grebenstein, M.; Liu, H.; Hirzinger, G. DLR–Hand II: Next Generation of a Dextrous Robot Hand. In Proceedings of the Proceedings 2001 ICRA IEEE International Conference on Robotics and Automation (Cat. No.01CH37164), Seoul, Republic of Korea, 21–26 May 2001; IEEE: Seoul, Republic of Korea, 2001; Volume 1, pp. 109–114. [Google Scholar]
- Wang, J.; Xie, H.; Wu, Y. Angular Position Sensor Based on Anisotropic Magnetoresistive and Anomalous Nernst Effect. Sensors 2024, 24, 1011. [Google Scholar] [CrossRef] [PubMed]
- Fan, H.; Li, S.; Nabaei, V.; Feng, Q.; Heidari, H. Modeling of Three–Axis Hall Effect Sensors Based on Integrated Magnetic Concentrator. IEEE Sens. J. 2020, 20, 9919–9927. [Google Scholar] [CrossRef]
- Popovic, R.S. Integrated Hall Magnetic Angle Sensors. J. Microelectron. 2014, 44, 257–263. [Google Scholar]
- Kaufmann, T.; Kopp, D.; Purkl, F.; Baumann, M.; Ruther, P.; Paul, O. Piezoresistive Response of Vertical Hall Devices. IEEE Sens. J. 2011, 11, 2628–2635. [Google Scholar] [CrossRef]
- Pang, H.; Pan, M.; Qu, W.; Qiu, L.; Yang, J.; Li, Y.; Yang, D.; Wan, C.; Zhu, X. Misalignment Error Suppression Between Host Frame and Magnetic Sensor Array. IEEE Trans. Instrum. Meas. 2021, 70, 9500707. [Google Scholar] [CrossRef]
- Wu, Z.; Bian, L.; Wang, S.; Zhang, X. An Angle Sensor Based on Magnetoelectric Effect. Sens. Actuators A Phys. 2017, 262, 108–113. [Google Scholar] [CrossRef]
- Pham, L.M.; Le Sage, D.; Stanwix, P.L.; Yeung, T.K.; Glenn, D.; Trifonov, A.; Cappellaro, P.; Hemmer, P.R.; Lukin, M.D.; Park, H.; et al. Magnetic Field Imaging with Nitrogen–Vacancy Ensembles. New J. Phys. 2011, 13, 045021. [Google Scholar] [CrossRef]
- Chipaux, M.; Tallaire, A.; Achard, J.; Pezzagna, S.; Meijer, J.; Jacques, V.; Roch, J.-F.; Debuisschert, T. Magnetic Imaging with an Ensemble of Nitrogen–Vacancy Center in Diamond. Eur. Phys. J. D 2015, 69, 166. [Google Scholar] [CrossRef]
- Maertz, B.J.; Wijnheijmer, A.P.; Fuchs, G.D.; Nowakowski, M.E.; Awschalom, D.D. Vector Magnetic Field Microscopy Using Nitrogen Vacancy Center in Diamond. Appl. Phys. Lett. 2010, 96, 092504. [Google Scholar] [CrossRef]
- Taylor, J.M.; Cappellaro, P.; Childress, L.; Jiang, L.; Budker, D.; Hemmer, P.R.; Yacoby, A.; Walsworth, R.; Lukin, M.D. High–Sensitivity Diamond Magnetometer with Nanoscale Resolution. Nat. Phys. 2008, 4, 810–816. [Google Scholar] [CrossRef]
- Rondin, L.; Tetienne, J.-P.; Hingant, T.; Roch, J.-F.; Maletinsky, P.; Jacques, V. Magnetometry with Nitrogen–Vacancy Defects in Diamond. Rep. Prog. Phys. 2014, 77, 056503. [Google Scholar] [CrossRef] [PubMed]
- Schirhagl, R.; Chang, K.; Loretz, M.; Degen, C.L. Nitrogen–Vacancy Center in Diamond: Nanoscale Sensors for Physics and Biology. Annu. Rev. Phys. Chem. 2014, 65, 83–105. [Google Scholar] [CrossRef] [PubMed]
- Schloss, J.M.; Barry, J.F.; Turner, M.J.; Walsworth, R.L. Simultaneous Broadband Vector Magnetometry Using Solid-State Spins. Phys. Rev. Appl. 2018, 10, 034044. [Google Scholar] [CrossRef]
- Li, C.-H.; Li, D.-F.; Zheng, Y.; Sun, F.-W.; Du, A.M.; Ge, Y.-S. Detecting Axial Ratio of Microwave Field with High Resolution Using NV Center in Diamond. Sensors 2019, 19, 2347. [Google Scholar] [CrossRef] [PubMed]
- Masuyama, Y.; Suzuki, K.; Hekizono, A.; Iwanami, M.; Hatano, M.; Iwasaki, T.; Ohshima, T. Gradiometer Using Separated Diamond Quantum Magnetometers. Sensors 2021, 21, 977. [Google Scholar] [CrossRef]
- Ilgisonis, V.I.; Skovoroda, A.A. Magnetic Field in a Finite Toroidal Domain. J. Exp. Theor. Phys. 2010, 110, 890–900. [Google Scholar] [CrossRef]
- Balasubramanian, G.; Chan, I.Y.; Kolesov, R.; Al-Hmoud, M.; Tisler, J.; Shin, C.; Kim, C.; Wojcik, A.; Hemmer, P.R.; Krueger, A.; et al. Nanoscale Imaging Magnetometry with Diamond Spins under Ambient Conditions. Nature 2008, 455, 648–651. [Google Scholar] [CrossRef]
- Hopper, D.; Shulevitz, H.; Bassett, L. Spin Readout Techniques of the Nitrogen–Vacancy Center in Diamond. Micromachines 2018, 9, 437. [Google Scholar] [CrossRef] [PubMed]
- Gali, Á. Ab Initio Theory of the Nitrogen–Vacancy Center in Diamond. Nanophotonics 2019, 8, 1907–1943. [Google Scholar] [CrossRef]
- Chen, G.-B.; Gu, B.-X.; He, W.-H.; Guo, Z.-G.; Du, G.-X. Vectorial Near–Field Characterization of Microwave Device by Using Micro Diamond Based on Tapered Fiber. IEEE J. Quantum Electron. 2020, 56, 7500106. [Google Scholar] [CrossRef]
- Li, Z.; Liang, Y.; Shen, C.; Shi, Z.; Wen, H.; Guo, H.; Ma, Z.; Tang, J.; Liu, J. Wide–Field Tomography Imaging of a Double Circuit Using NV Center Ensembles in a Diamond. Opt. Express 2022, 30, 39877. [Google Scholar] [CrossRef] [PubMed]
- Shi, Z.; Li, Z.; Liang, Y.; Zhang, H.; Wen, H.; Guo, H.; Ma, Z.; Tang, J.; Liu, J. Multichannel Control for Optimizing the Speed of Imaging in Quantum Diamond Microscope. IEEE Sens. J. 2023, 23, 24366–24372. [Google Scholar] [CrossRef]
- Jackson, J.D. Classical Electrodynamics, 3rd ed.; John Willy International Press: Hoboken, NJ, USA, 1998; pp. 24–50. [Google Scholar]
- Chen, Y.; Guo, H.; Li, W.; Wu, D.; Zhu, Q.; Zhao, B.; Wang, L.; Zhang, Y.; Zhao, R.; Liu, W.; et al. Large–Area, Tridimensional Uniform Microwave Antenna for Quantum Sensing Based on Nitrogen–Vacancy Center in Diamond. Appl. Phys. Express 2018, 11, 123001. [Google Scholar] [CrossRef]
- Li, Z.; Li, Z.; Shi, Z.; Zhang, H.; Liang, Y.; Tang, J. Design of a High–Bandwidth Uniform Radiation Antenna for Wide–Field Imaging with Ensemble NV Color Center in Diamond. Micromachines 2022, 13, 1007. [Google Scholar] [CrossRef] [PubMed]
- Barry, J.F.; Schloss, J.M.; Bauch, E.; Turner, M.J.; Hart, C.A.; Pham, L.M.; Walsworth, R.L. Sensitivity Optimization for NV–Diamond Magnetometry. Rev. Mod. Phys. 2020, 92, 015004. [Google Scholar] [CrossRef]
- Levine, E.V.; Turner, M.J.; Kehayias, P.; Hart, C.A.; Langellier, N.; Trubko, R.; Glenn, D.R.; Fu, R.R.; Walsworth, R.L. Principles and Techniques of the Quantum Diamond Microscope. Nanophotonics 2019, 8, 1945–1973. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
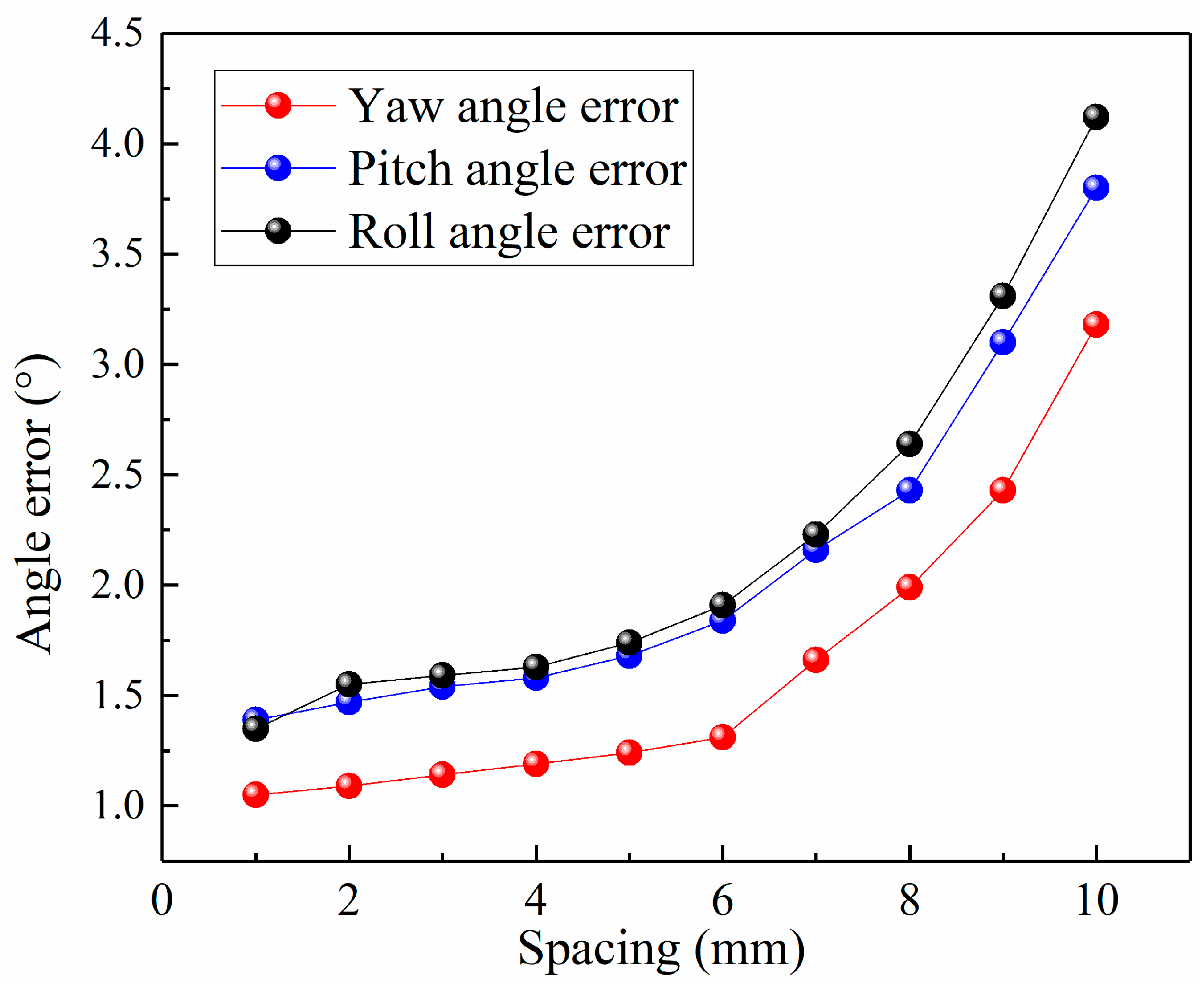
| Spacing (mm) | Yaw Angle α (°) | Pitch Angle φ (°) | Roll Angle β (°) |
|---|---|---|---|
| 1 | 1.05 | 1.39 | 1.35 |
| 2 | 1.09 | 1.47 | 1.55 |
| 3 | 1.14 | 1.54 | 1.59 |
| 4 | 1.19 | 1.58 | 1.63 |
| 5 | 1.24 | 1.68 | 1.74 |
| 6 | 1.31 | 1.84 | 1.91 |
| 7 | 1.66 | 2.16 | 2.23 |
| 8 | 1.99 | 2.43 | 2.64 |
| 9 | 2.43 | 3.1 | 3.31 |
| 10 | 3.18 | 3.8 | 4.12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Z.; Jin, H.; Zhang, H.; Li, Z.; Wen, H.; Guo, H.; Ma, Z.; Tang, J.; Liu, J. Measurements of Spatial Angles Using Diamond Nitrogen–Vacancy Center Optical Detection Magnetic Resonance. Sensors 2024, 24, 2613. https://doi.org/10.3390/s24082613
Shi Z, Jin H, Zhang H, Li Z, Wen H, Guo H, Ma Z, Tang J, Liu J. Measurements of Spatial Angles Using Diamond Nitrogen–Vacancy Center Optical Detection Magnetic Resonance. Sensors. 2024; 24(8):2613. https://doi.org/10.3390/s24082613
Chicago/Turabian StyleShi, Zhenrong, Haodong Jin, Hao Zhang, Zhonghao Li, Huanfei Wen, Hao Guo, Zongmin Ma, Jun Tang, and Jun Liu. 2024. "Measurements of Spatial Angles Using Diamond Nitrogen–Vacancy Center Optical Detection Magnetic Resonance" Sensors 24, no. 8: 2613. https://doi.org/10.3390/s24082613