1. Introduction
Fiber-reinforced composite (FRC) materials have been gaining great popularity in marine structures over the past couple of decades because of their excellent strength-to-weight ratio [
1,
2], low density [
3], corrosion resistance [
1], and additional degrees of freedom in the design process [
4]. However, the non-isotropic material properties in combination with rather complex manufacturing procedures provoke uncertainties in material properties and structural integrity of FRC materials after production and during their use [
5,
6]. Process-induced defects, such as voids, fiber misalignment, and delamination are common problems encountered during composite manufacturing [
7,
8,
9]. The formation of these irregularities can significantly affect the mechanical performance of FRCs [
9,
10,
11,
12]. Moreover, structural degradation arises during service of the structure due to (cyclic) loading, the operating environment, and/or human errors.
To fully exploit the advantages of FRC materials, non-destructive evaluation (NDE) techniques have been proposed to analyze structural properties and identify damage [
13]. These techniques utilize mechanical, chemical, or electromagnetic forces to disrupt the structure and measure the response. By anticipating that any internal irregularity will alter the returned signal, this signal offers insight into the material properties or structural damage [
14]. Commonly used techniques for damage detection and structural integrity assessment are visual inspection and tap testing [
15], radiographic testing [
16,
17], electromagnetic testing [
18,
19,
20], shearography [
21], vibration-based testing [
22], acoustic emission testing [
23,
24], and ultrasonic testing [
25,
26,
27,
28,
29,
30]. However, these inspection methods are often limited by their insensitivity to small forms of damage and/or by their inability to detect damage that is not in close proximity to the inspection point. Additionally, these methods may not accurately assess the severity of the detected damage, making it difficult to determine the appropriate course of action for repairs or mitigation [
31].
Over the past decade, ultrasonic guided wave (UGW) inspection methods have emerged as a promising technique for NDE due to their notable advantages. These methods offer a cost-effective, rapid, and repeatable means of inspecting large areas in a short amount of time without requiring the motion of transducers. UGWs are sensitive to small-size damage and can quantitatively evaluate both surface and internal damages that have a size greater than half its wavelength. Additionally, UGW devices can have a low power consumption, making them well-suited for use in remote or hard-to-reach locations [
31,
32,
33].
The multimodal and dispersive character of UGW propagation is sensitive to the structural properties and has therefore been the basis of multiple studies on damage detection [
29,
32,
34,
35,
36,
37] and elastic properties characterization [
38,
39,
40] of FRCs. Combining these features with their non-destructive nature shows the high potential of UGWs in the field of NDE [
41,
42]. Several studies have been conducted on the stiffness determination of FRC materials using UGWs [
39,
43]. Most of these methods involve a computationally intensive optimization process between the results obtained from experiments and the predictions generated by a forward numerical model [
44].
This study introduces an enhanced non-destructive method for in situ stiffness assessment of FRCs using UGWs. The proposed methodology utilizes a computationally efficient inversion algorithm to evaluate the structural stiffness of FRCs by comparing experimentally measured UGW speeds with a pre-established dataset of UGW speeds and corresponding stiffness properties. The approach offers potential for future rapid in situ assessment of large-scale composite structures.
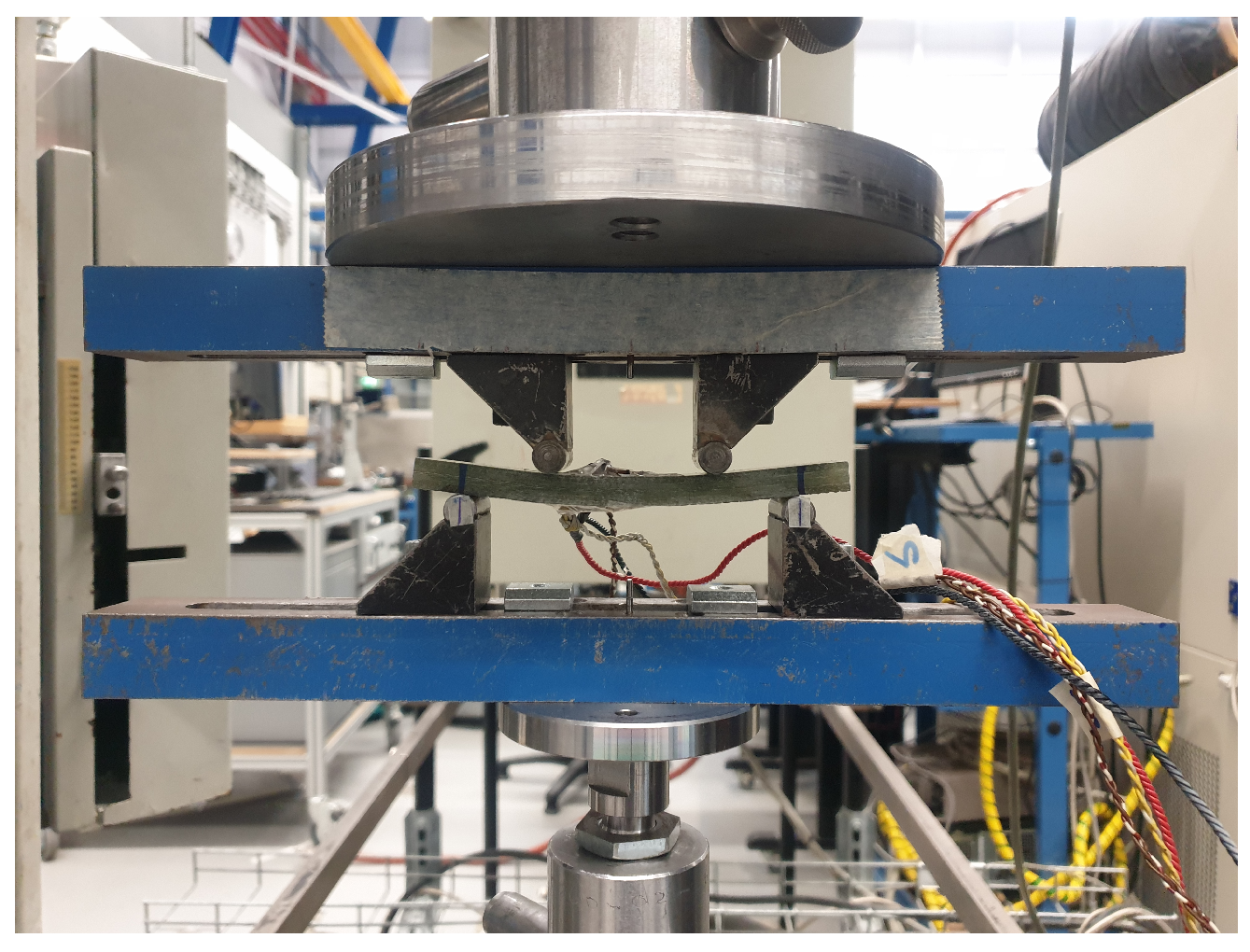
The performance of the proposed methodology was initially evaluated through a numerical evaluation. To demonstrate its practical feasibility for in situ applications, a glass fiber reinforced sample plate was fabricated and subjected to the assessment methodology. Subsequently, the plate was cut into coupons and mechanical tests were conducted to evaluate the stiffness properties obtained from this new assessment methodology.
The proposed methodology and evaluation procedure are described in
Section 2. The experiments consisting of UGW testing and mechanical testing are discussed in
Section 3. The results and discussion are presented in
Section 4. Lastly,
Section 5 presents the conclusions.
2. Methodology
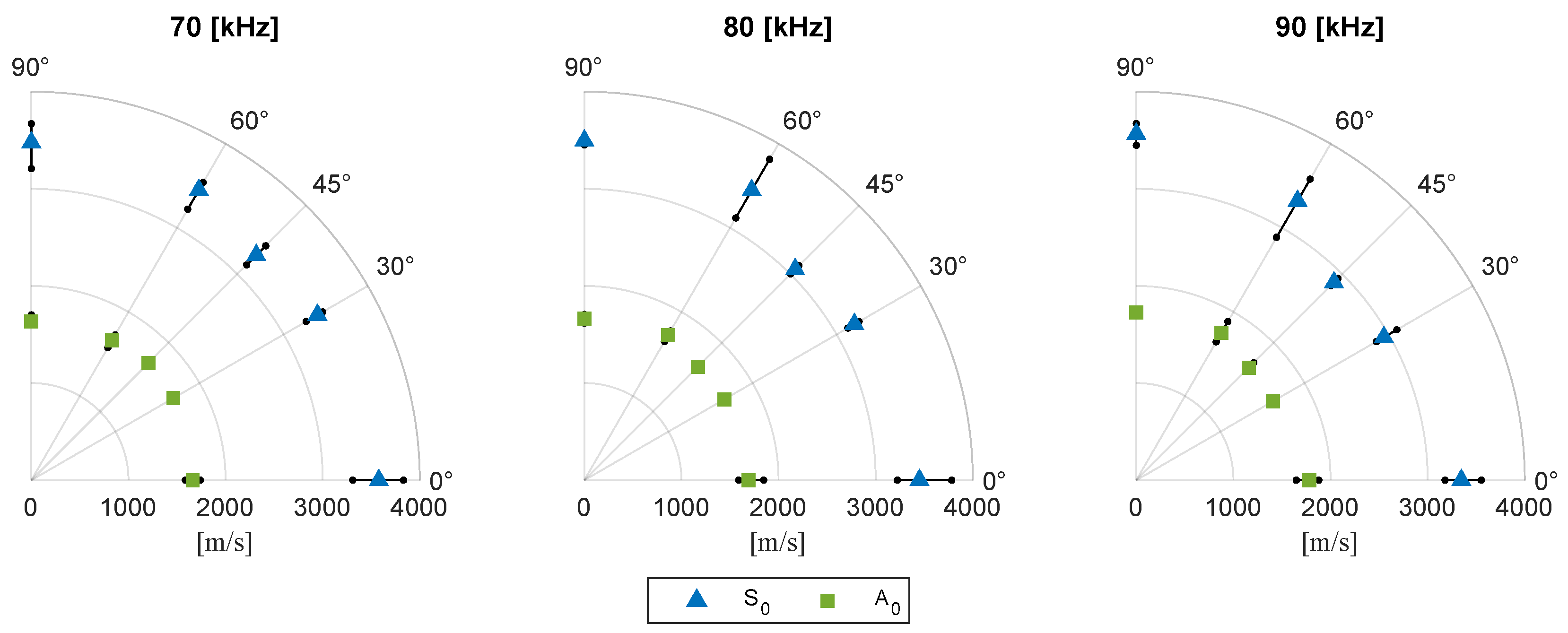
The zero-order symmetric (
) and antisymmetric (
) wave modes are most often used in guided wave NDE techniques [
45,
46]. The main reason for that is their sensitivity to structural damage and strong correlation to mechanical stiffness [
35,
36,
47]. Next to that, these wave modes are more straightforward to excite and measure than the higher-order guided wave modes.
The classical laminate theory (CLT) is commonly used to describe the behavior of composite materials under different types of loading conditions through use of the
-matrix, as described in Equation (
1) [
4].
Here, and are the external forces and moments applied on the structure, respectively, and denote the internal strains and curvatures. represents the in-plane stiffnesses, captures the coupling between in-plane forces and out-of-plane deformations, and signifies the out-of-plane bending stiffnesses. Using these stiffness components, a generic expression for group wave propagation in anisotropic media is formulated as:
Here, m denotes the guided wave mode, denotes the wave frequency, and , , and denote the first, second, and third mass moments of inertia, describing the total mass, center of mass, and moment of inertia, respectively. Generally, it can be expected that symmetric wave modes are predominantly influenced by the extensional stiffness, while antisymmetric wave modes are dominated by bending stiffness.
Establishing an analytical solution for Equation (
2) is not deemed feasible due to the complexity of the governing equations for guided waves in anisotropic media. This research investigates the possibility of utilizing an approximate description of
in terms of the
-components using a set of coupling coefficients (
). For an arbitrary guided wave mode
m propagating at frequency
, this relationship is given as
Here, subscript
S denotes the total number of unknown
-components and
denotes the approximation error. This error is dependent on the wave mode, material properties, and wave frequency, and may not be considered generally negligible. When dealing with symmetric wave modes, the error is expected to be fairly small for laminates with weak axial-bending coupling. However, for antisymmetric wave modes, a larger error may be expected, as the relationship between material stiffness and
is generally more complex and involves higher-order terms [
48,
49]. Increased axial-bending coupling is expected to further increase the approximation error. Equation (
3) can also be expressed in matrix-vector format:
In this system of equations, represents the matrix of coupling coefficients, while and denote the vectors containing the squared group speeds and approximation errors, respectively. At sufficiently low frequencies where only the and wave modes are involved, the vector reduces to
Here, subscript
W indicates the total number of
and
wave velocities included. Vector
(size
) in Equation (
4) represents the unknown stiffness properties of the FRC plate under analysis, structured as
Based on this system, it would be possible to estimate using an inverse procedure when matrix (size ) is known and the squared group speed vector (size ) is obtained through measurements.
2.1. Calculation of the Coupling Coefficients
To calculate the coupling coefficients (
) in matrix
, a specific composite plate of interest is considered. The design process for composite laminates allows for a wide range of possible stiffness properties resulting from design properties, such as material type, stacking sequence, and plate/ply thickness. By utilizing prior information (for example, a known stacking sequence and/or
ply stiffness) of the plate of interest, this wide range of possible stiffness properties can be narrowed down to a reduced range of stiffness possibilities. The proposed method captures this range of stiffness possibilities in the coupling coefficients. To achieve this, the coefficients are numerically determined by analyzing a set of
R reference laminates
, where
. These reference laminates are chosen so that their stiffness properties fall within the range of stiffness possibilities. By using a sufficient number of reference laminates to sufficiently cover the range of stiffness possibilities, it is expected that a converged stiffness approximation can be obtained. Determination of the set of coupling coefficients
related to wave mode
m (Equation (
3)) is described as follows:
Here, each row of matrix
(size
) consists of the
-components of a single reference laminate
, which is calculated using the CLT. Similarly, each element of vector
(size
) consists of the squared group speed of wave mode
m of reference laminate
. Equation (
7) is solved in a least-squares sense.
There is generally a large difference in magnitude of the extensional stiffness components , coupling stiffness components , and bending stiffness components . To improve the condition of the numerical operations, matrix is column-wise normalized by the absolute maximum component included in the column. This matrix scaling can be expressed as
Here, vector
contains the absolute maximum stiffness component of each column of matrix
and ⊙ indicates the element-wise matrix multiplication. This results in the following modified version of Equation (
7):
Consequently, vector
in Equation (
4) is column-wise normalized, resulting in the following modification of Equation (
4):
Dispersion Analysis Using the Semi-Analytical Finite Element Method
The reference velocities in
(Equation (
12)) are calculated from
by using the semi-analytical finite element method (SAFEM). SAFEM is a particularly efficient tool for calculating phase and group speed dispersion curves of guided waves in multilayered composite laminates and is commonly used as forward numerical model in NDE [
50,
51,
52,
53,
54,
55]. SAFEM operates under the assumption of plane strain behavior, employing finite element discretization along the thickness direction or cross section of the waveguide. The displacement in the direction of wave propagation is analytically described using harmonic exponential functions. This makes it more computationally efficient than conventional 3D FEM [
56].
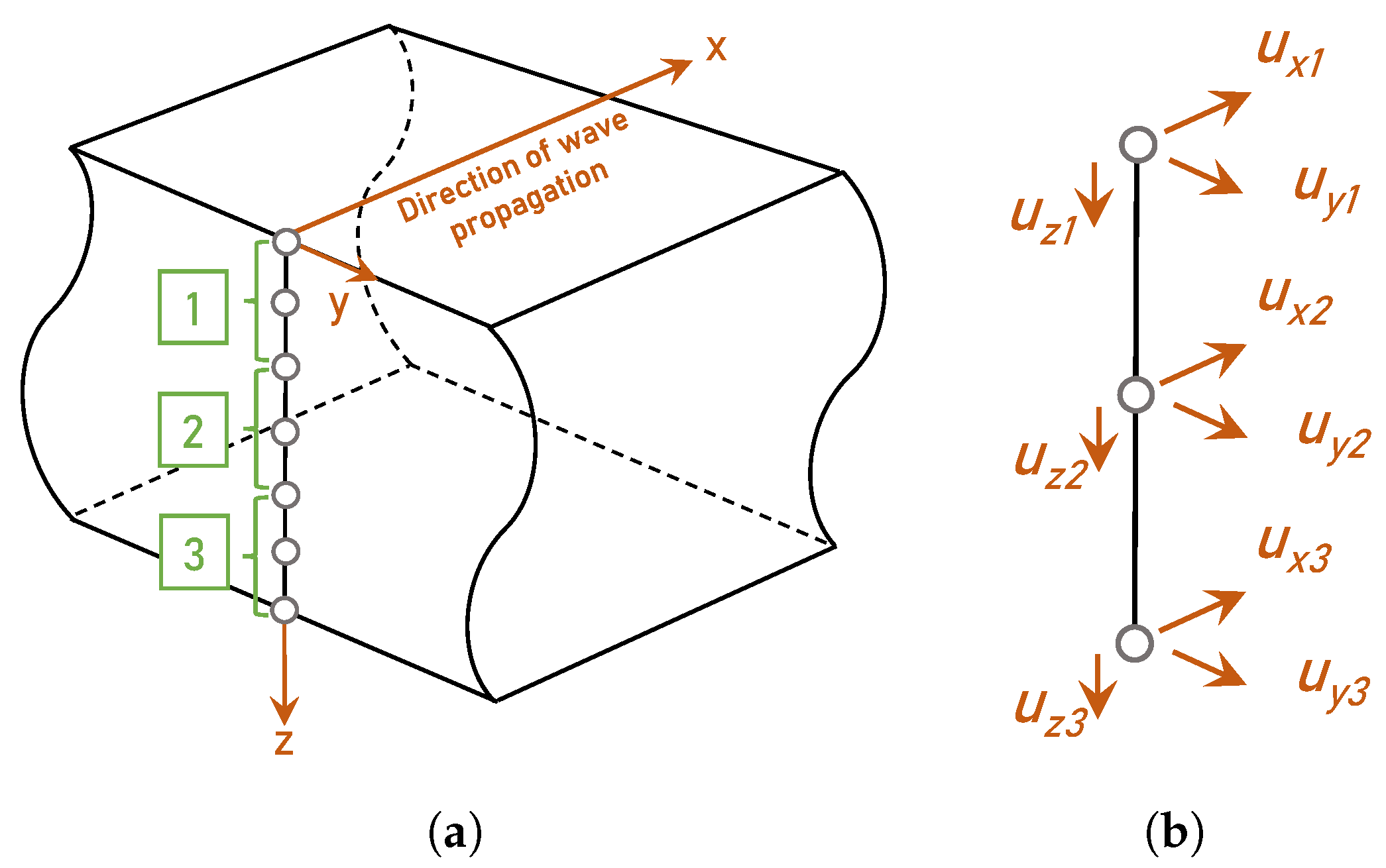
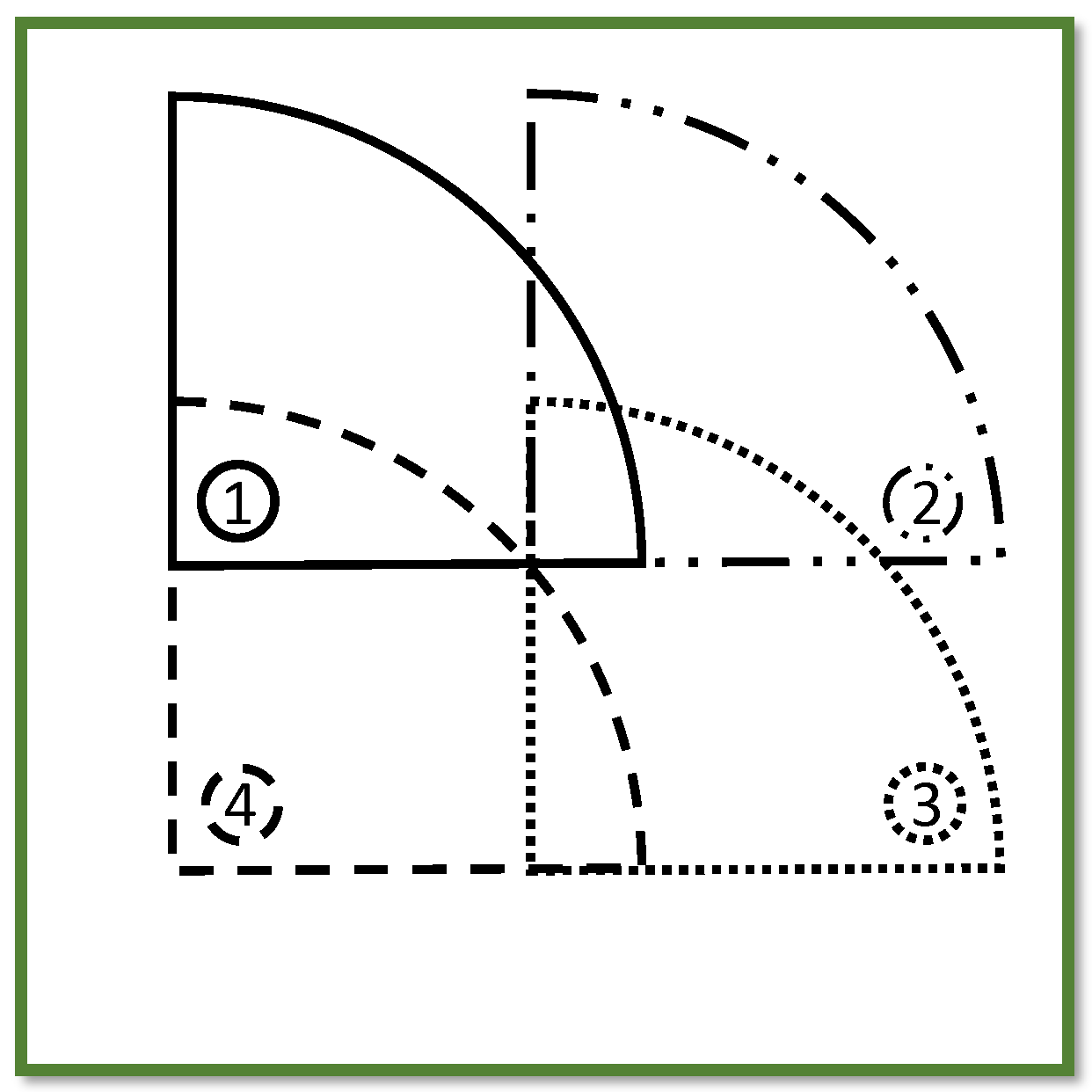
Figure 1 shows a discretization of wave propagation in the
x-direction used in 1D SAFEM, assuming an infinitely wide plate and three-node elements. The equations of motion are expressed by Hamilton’s equation [
57] and the SAFEM solutions are obtained in a stable manner from an eigenvalue problem. A detailed description of SAFEM is provided by Barazanchy [
50] and Bartoli [
51].
2.2. Robustness of the Algorithm
When applied in practice, the measured squared group speed vector
(used in Equation (
13)) may be affected by environmental conditions and/or measurement errors. To study the robustness of the algorithm with respect to imperfect input data, a numerical sensitivity study is performed. In this sensitivity study, different system configurations are considered. These configurations vary in the number of unknown
-components (
S) included in Equation (
13) and are discussed in
Section 2.3.3. For each configuration the effect of the presence of measurement errors on the approximation of
is studied. The group speed vector, including measurement errors
, is defined as follows:
Here, vector
is the original group speed vector as defined in Equation (
13). Vector
includes the measurement errors and is calculated as:
Here, the original velocity vector is element-wise multiplied by error vector defined as:
Here, denotes an arbitrary value between and , which defines the maximum possible measurement error included in the error vector.
2.3. Evaluation Procedure
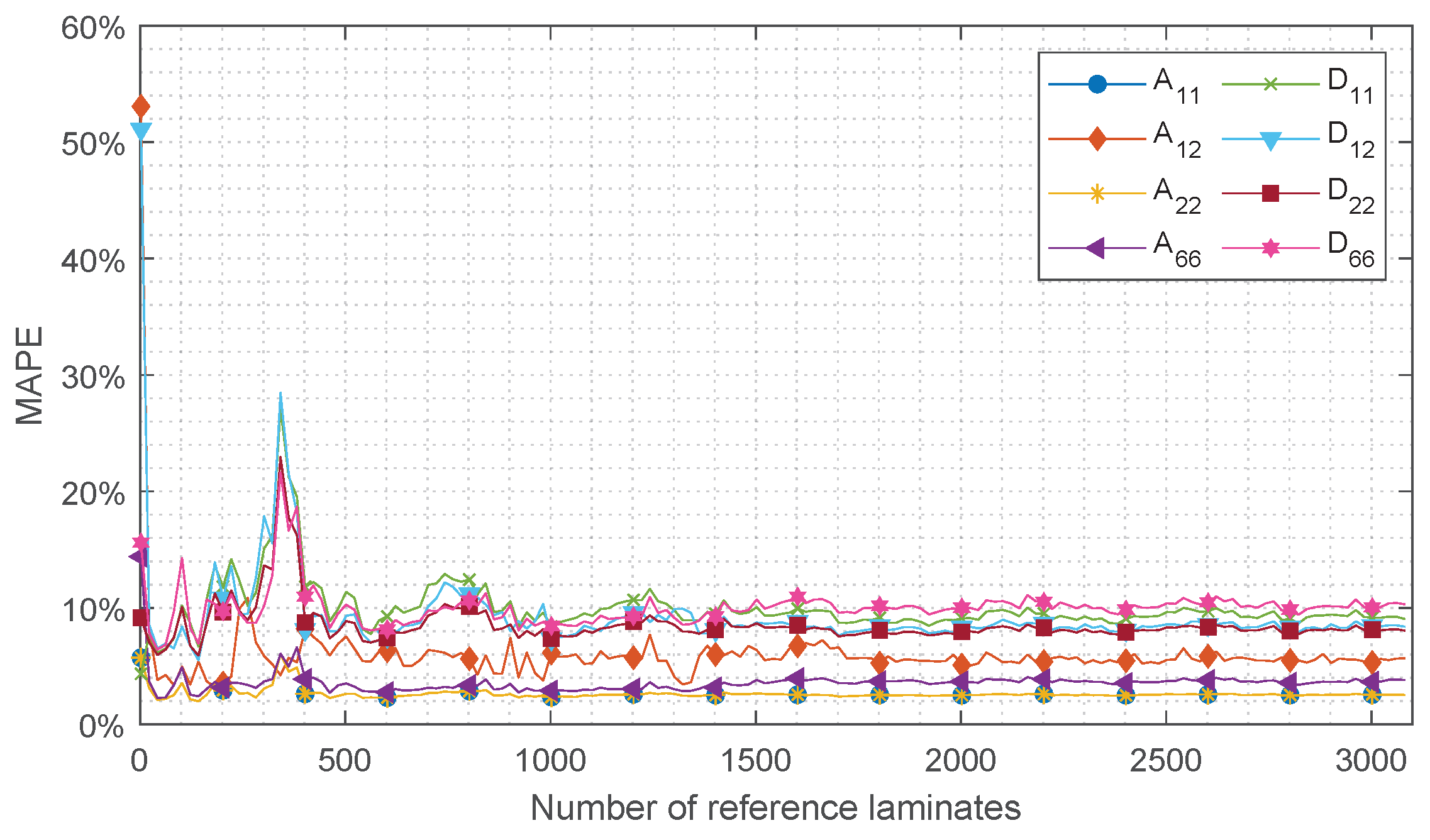
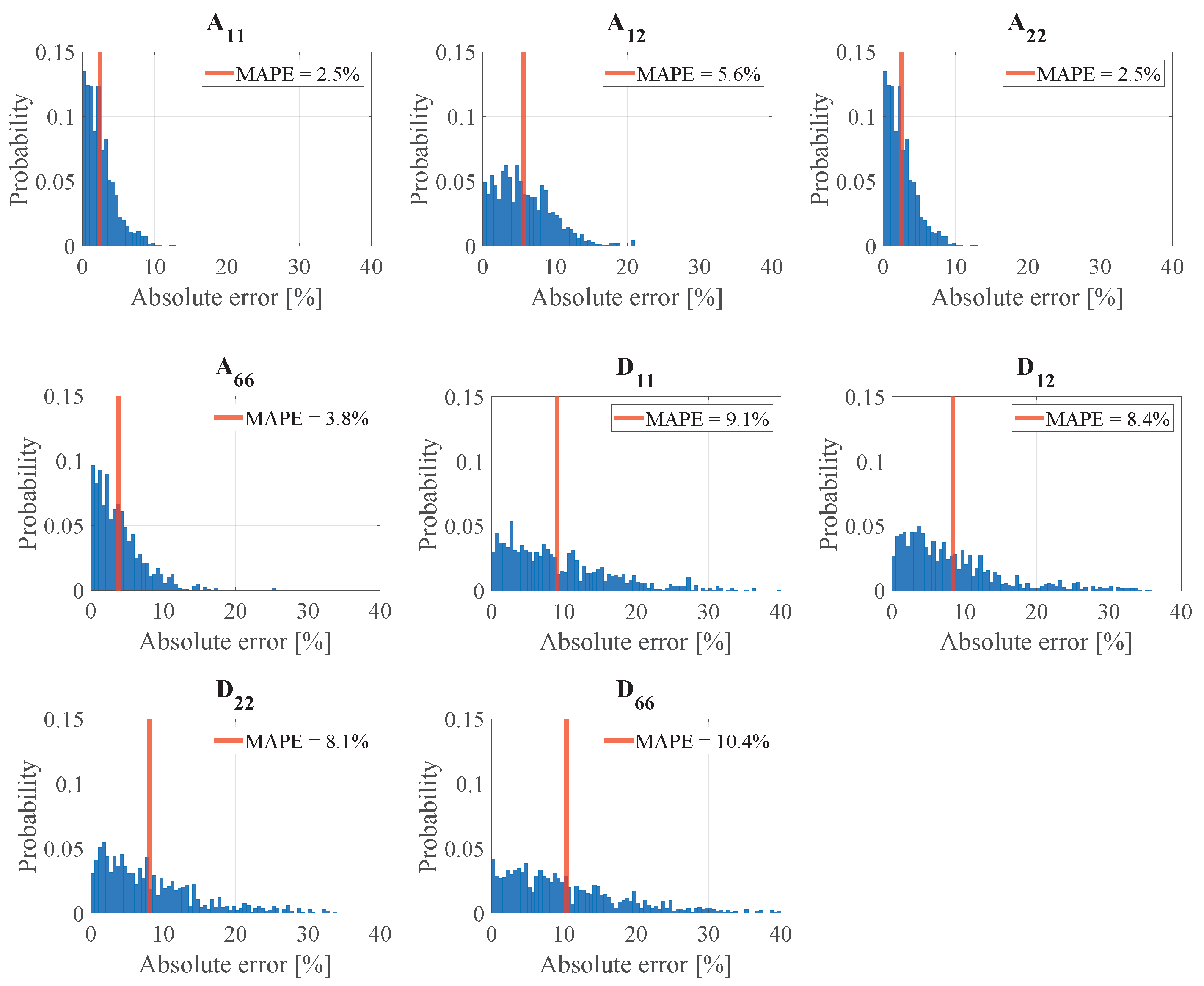
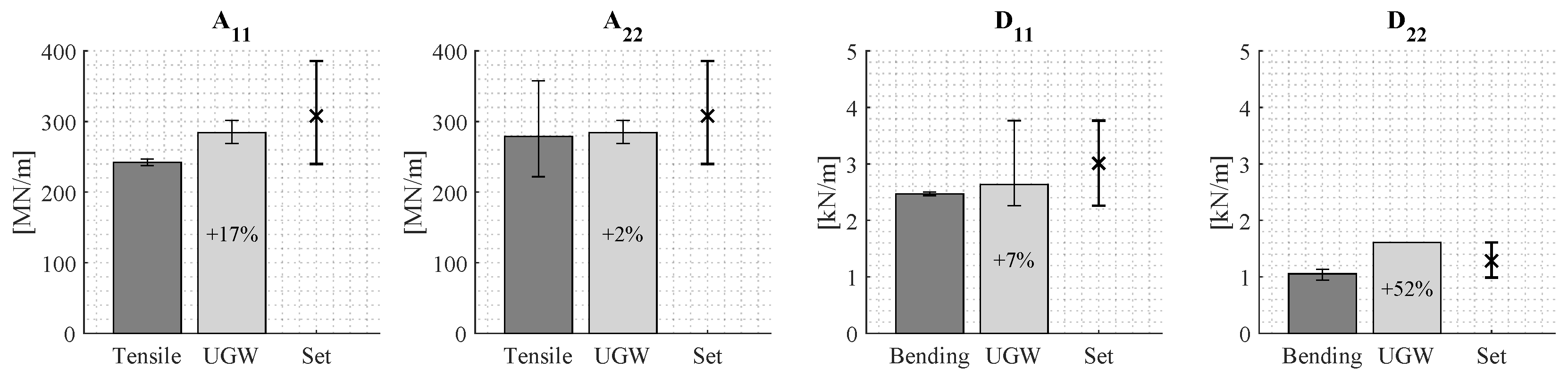
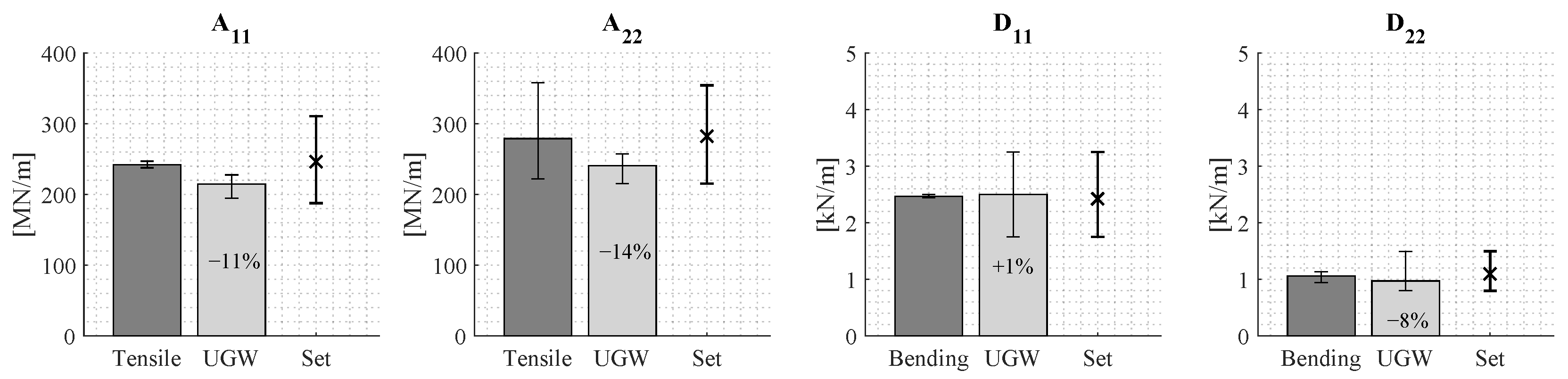
The potential of the proposed methodology is demonstrated in a numerical and experimental evaluation. For this evaluation procedure, a stiffness approximation is performed on a glass fiber-reinforced plate that is manufactured by vacuum infusion processing. First, a numerical evaluation is performed, in which conclusions are drawn on (i) the convergence of the -approximation as function of the number of reference laminates (R) and (ii) the robustness of the algorithm as function of the number of unknown -components (S). The findings of this numerical evaluation are used in the experimental evaluation in which the stiffness of the manufactured panel is assessed by measuring the UGW velocities. Afterwards, the test panel will be cut into test coupons and subjected to bending and tensile tests to obtain the stiffness properties according to mechanical testing.
2.3.1. Plate Specifications
The plate in this investigation is a cross-ply laminate consisting of transversely isotropic plies made of glass fibers and vinyl ester resin with the specifications given in
Table 1. The general properties of the panel are given in
Table 2. The expected ply properties are provided by manufacturing and are given in
Table 3. Based on these expected plate properties, the dispersion curves are derived using SAFEM and presented in
Figure 2.
2.3.2. System Configuration
Equation (
3) is established for waves propagating at three different frequencies and along five different directions, resulting in a total of 30 equations included in the system of equations of Equation (
13) (
). Given the symmetric and balanced cross-ply layup, it can be inferred that there is no coupling stiffness (
), no stretching–shearing coupling (
), and no bending–twisting coupling (
). As a result, coefficient matrix
in Equation (
13) reduces in dimensions to
.
Reference Laminates
For this evaluation procedure, the stacking sequence, ply thickness (
), and density (
) of the test panel are assumed to be known and the panel is defect-free. Furthermore, it is assumed that the actual properties of the plies (
,
,
,
,
, and
) are unknown but located within a range of
with respect to a set of expected ply properties (the so-called baseline laminate). The unknown ply stiffness properties are arbitrarily generated within the range of expected ply properties. This arbitrary process is for
described as
Here, is the randomly generated value of for the reference laminate , is the value of of the baseline laminate, and is a randomly generated value between −20% and +20%. The same approach is used for all unknown ply properties. The ply properties of each reference laminate are randomly generated, independently of the other reference laminates. In this manner a set of 3100 reference laminates is generated. It is expected that this amount sufficiently covers the range of stiffness possibilities.
For this evaluation procedure, two sets of reference laminates are generated, each using a different baseline laminate. The first set of reference laminates (the manufacturer’s set) uses the expected ply properties provided by the manufacturer (
Table 3). The second set (the mechanical testing set) uses the ply properties according to the mechanical tensile and four-point bending tests, which will be discussed in
Section 4.2 2.3.3. Robustness of the Algorithm
The robustness of the algorithm with respect to imperfect input data is investigated in the numerical evaluation. Three system configurations are considered, as defined in
Table 4. Configuration 1 includes all the unknown stiffness components of the panel under investigation. In configurations 2 and 3, a subset of these components has been selected to shed light on the possibilities of reducing the system size based on the expected relationship between stiffness components and wave modes.




 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}