3.1. Method
The Electrochemical Impedance Spectroscopy (EIS) has the advantage, compared to other methods, to have a less influence on battery or fuel cell during the working of these latter. It can provide more information on the state of the charge. Measurements are generally carried out without load. It is useful to cover a large frequency range in order to obtain more information from the impedance spectrum generated. For a PEM fuel cell, the impedance spectrum was generated in a frequency ranging from 1Hz to 10 kHz [
4]. However, Walkiewicz and al [
5] did studies between 1mHz and 65KHz. The number of points collected by decade varies between 8 and 10 points. The principle of measurement is to add a signal, at constant frequency, to the output of the voltage of the battery when this latter is delivering the desired current. The superimposed signal can be obtained by three methods: potentiostatic, galvanostatic or load modulation methods.
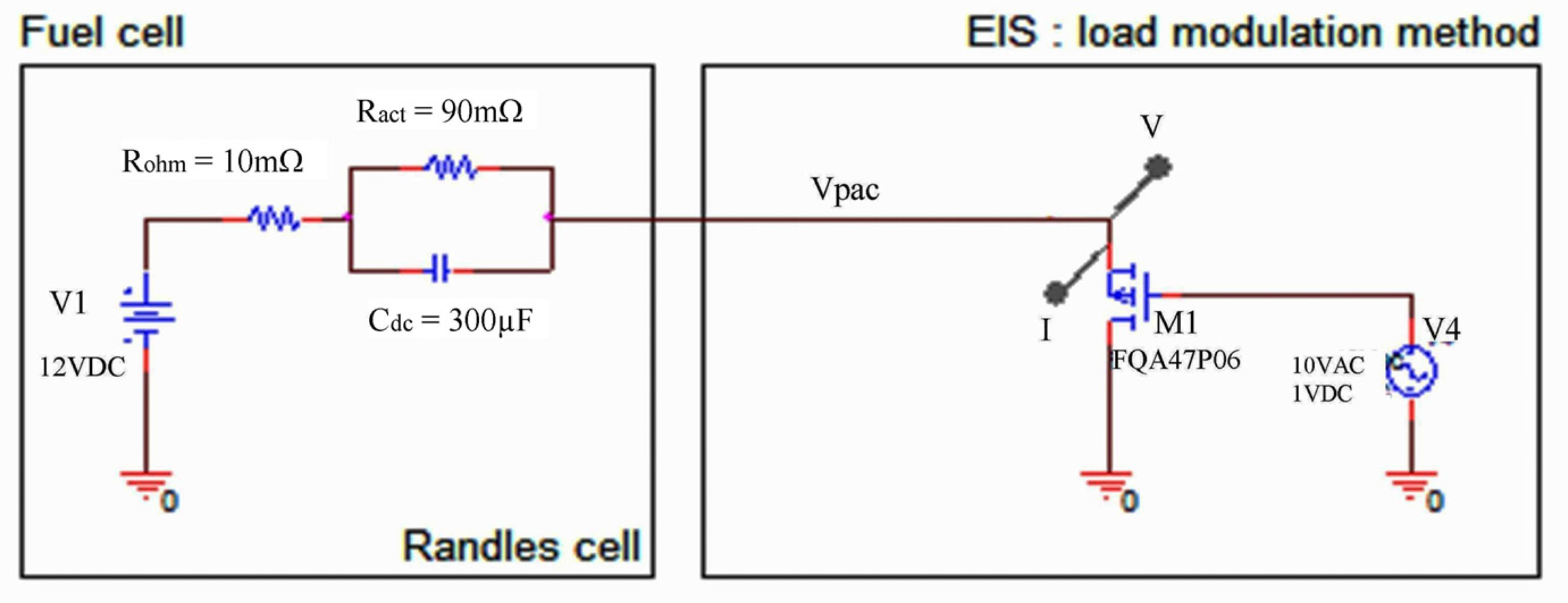
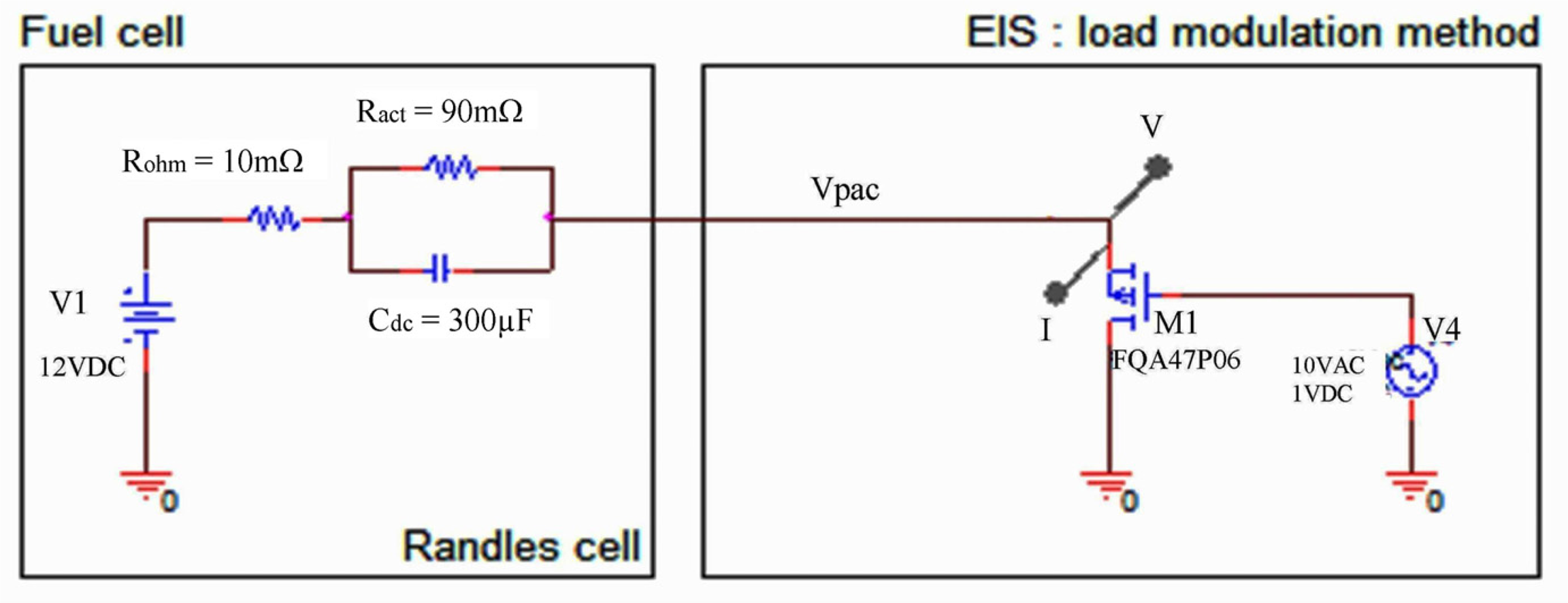
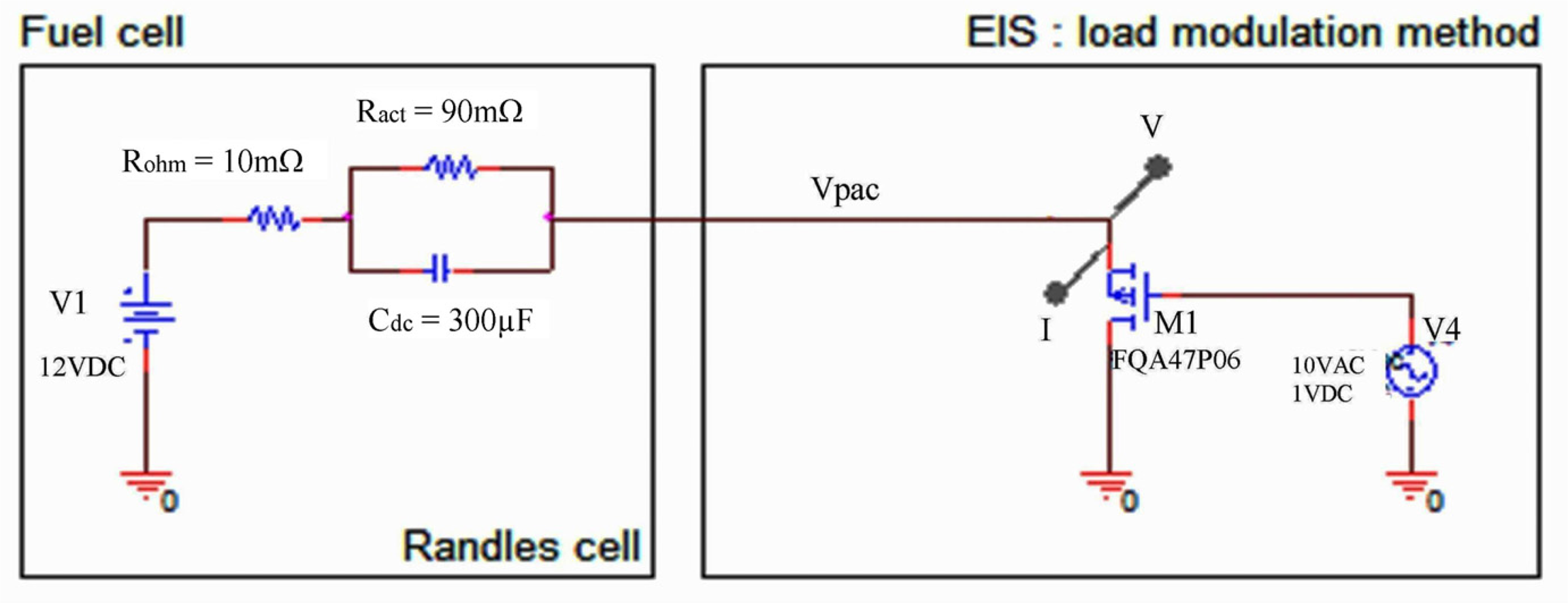
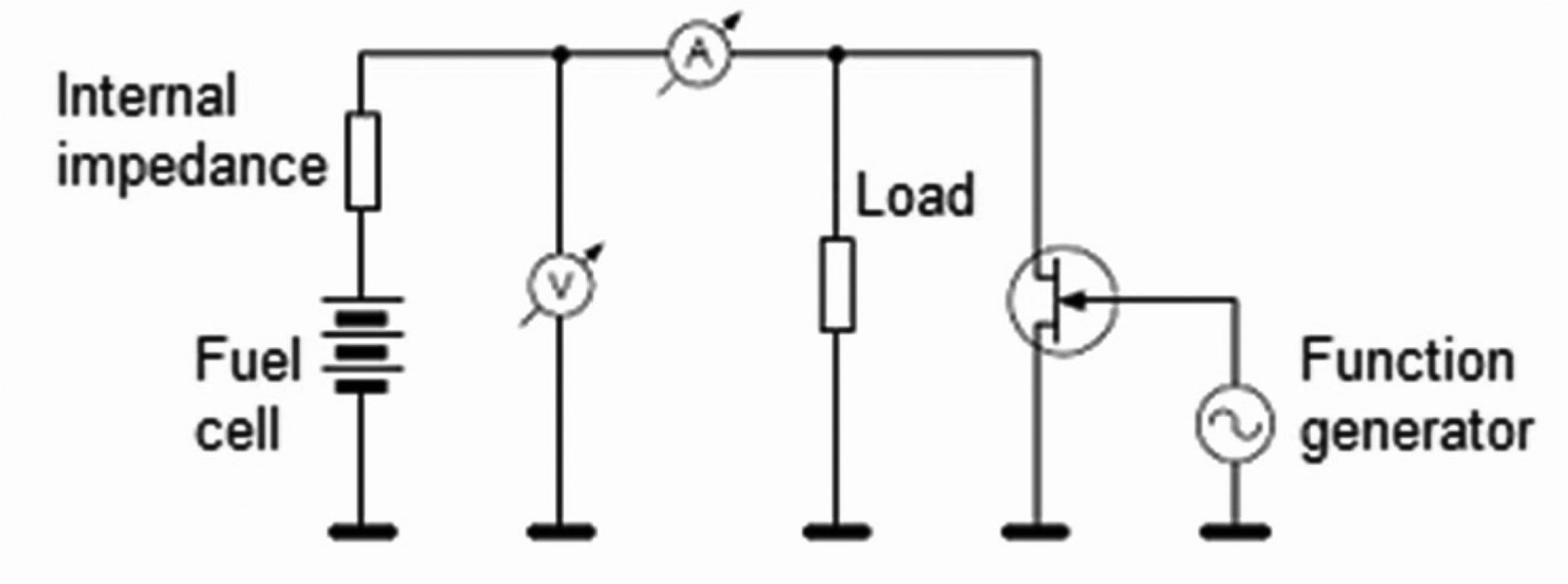
Among of these three later methods, we have selected the load modulation method. It consists in varying the resistance of the load according to the signal that we would like to superimpose. Thus, the impedance of battery or fuel cell under test can be obtained by the ratio of the voltage of the battery and the current coming from the battery.
Figure 3 shows an electric representation of this method.
3.2. Principle of the test bench
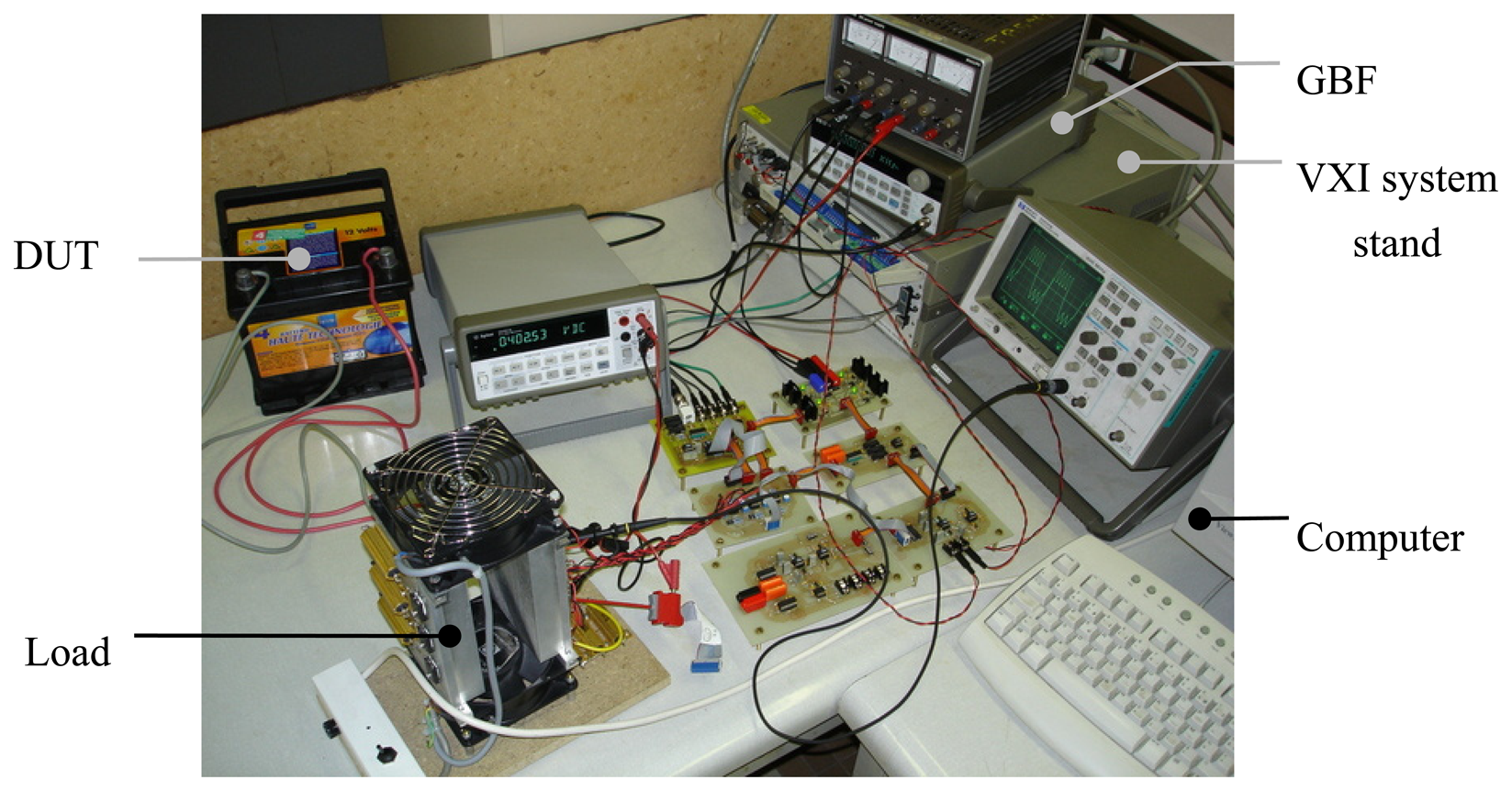
The principle of the measurement using the test bench developed in our laboratory is presented in
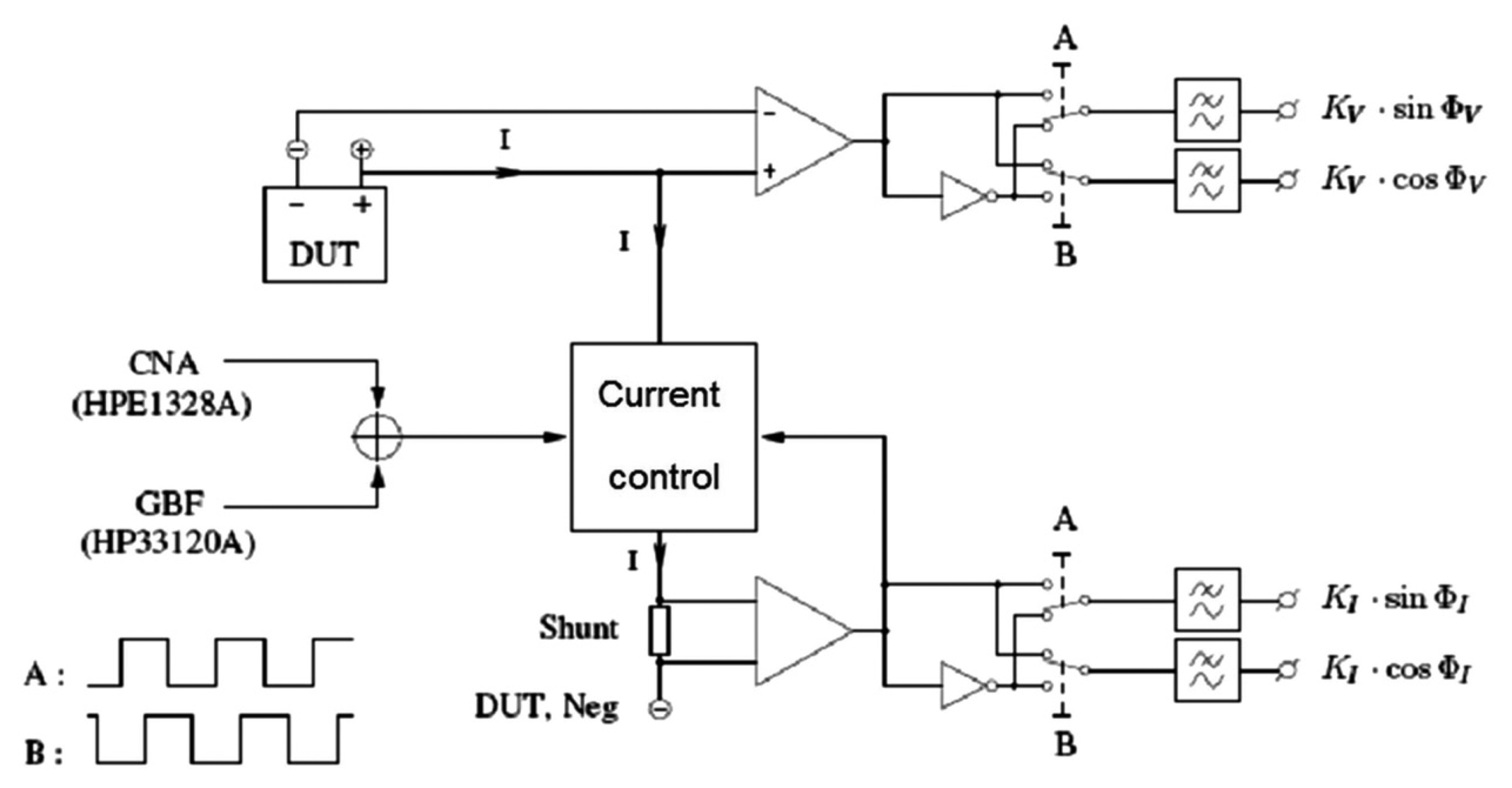
Figure 4. The current is controlled by an analogical current regulation. This allows us to have a more linear, fast and reliable regulation.
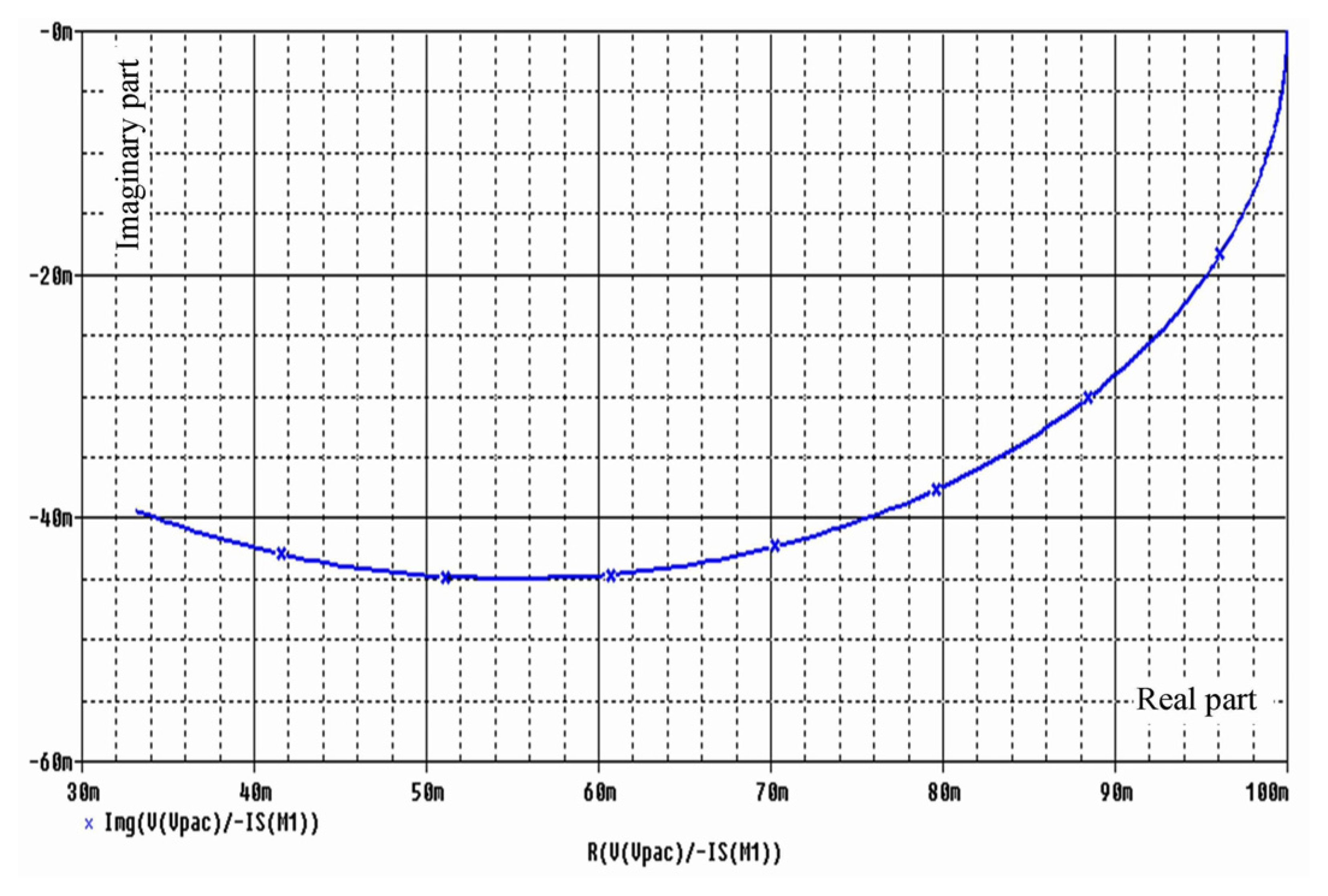
The instrumentation is developed around a VXI system stand, which controls different electronic cards. Software, under Hpvee®, was developed for automatic impedance measurements of the device under test (DUT). In order to filter the noise and to avoid the influence of the 50Hz, a synchronous detection was used, which filters a very narrow way around the useful signal. Thus, it is possible to filter all the noise and to detect the amplitude of the useful signal at frequency fixed. Two synchronous detections were used: the first is used for the imposed current to the device under test, while the second is used for the response of the voltage of this same device. These two synchronous detections are controlled by four square signals delivered by an electronic card, which are out phase of 90°. The output of this synchronous detection allowed us to collect the real and imaginary part of the current and voltage, as well as, their respective phases. The real and imaginary part of the impedance of the DUT is calculated then by using the ohm's law. These two parameters (real and imaginary part of the complex impedance) can be plotted in the Nyquist diagram.
The system developed, by our own, can support an active current up to 50A on the load. The new achievement in this work results in the possibility to better understand and to study the fuel cell in its environment when it is delivering current on load such as electric motor. In this case, the measurement and the analysis of the impedance are a good tool, which can give useful information about the state of the battery. For a better comprehension of the system operation, we make a more detailed description below.
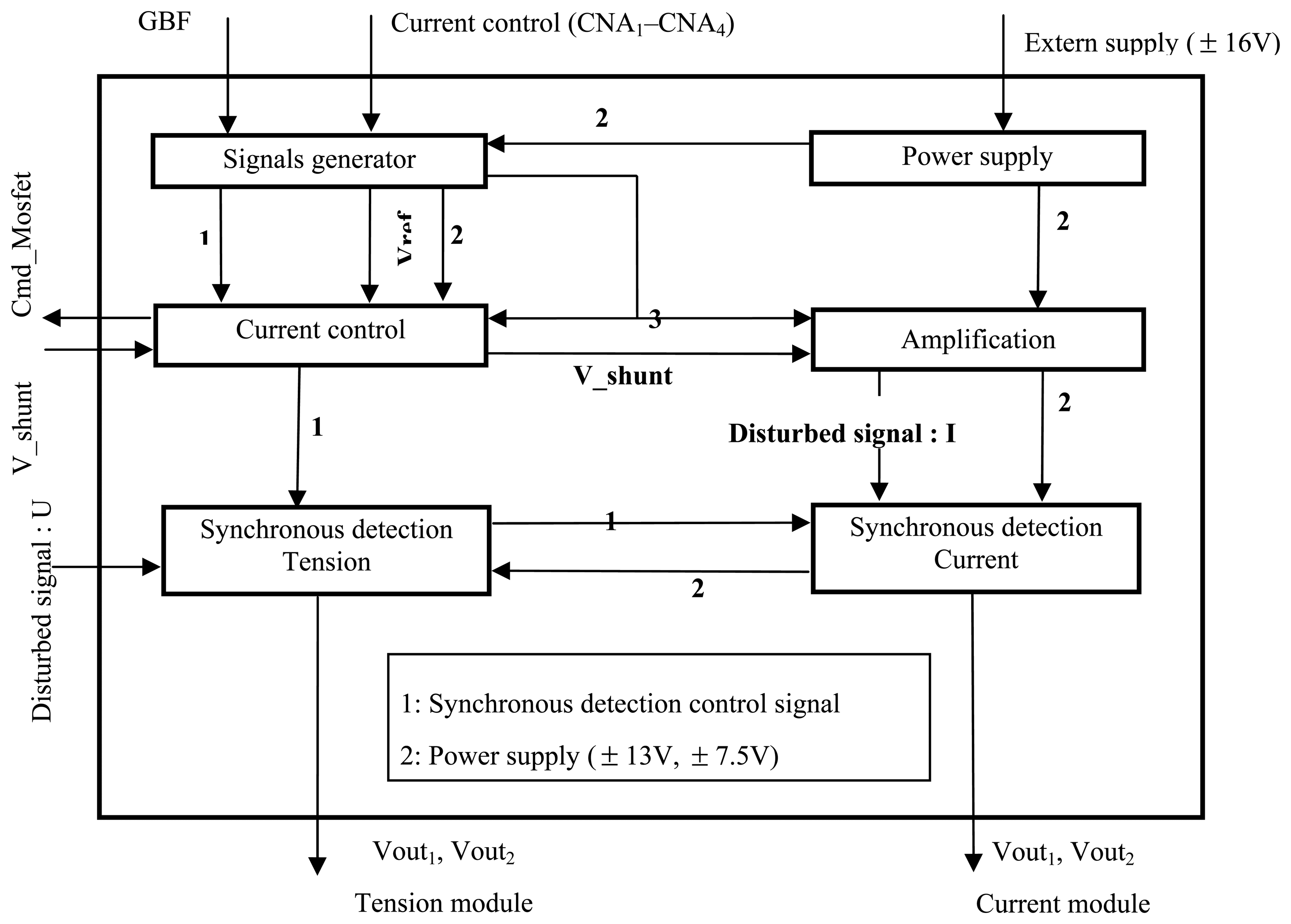
The instrumentation is controlled by an Hpvee® program developed for this project. This program controls a VXI system stand containing several measuring devices in the form of plug-in circuits: a GBF (HPE1340A), a multimeter (HPE1326B), a 4-Channel D/A Converter (HPE1328A), a multiplexer 16 ways (HPE1351A) and an input/output circuit (HPE1330B). The “Power supply” module provides the supply to the various electronic circuits, it delivers a tension of ±13V and ±7.5V. The “Signals generator” module provides the control square signals for the synchronous detections of the tension and the current, as well as the current imposed signal. These signals are generated from the sinusoidal signal delivered by the GBF. The frequencies scanning is controlled by the Hpvee® program, which changes the frequency value step by step defines after the measurement of Vout1 and Vout2 of the tension and the current. The “Current control” module drives the load by an imposed current while running. This current is a square signal, generated by the “Signals generator” module; it is composed of a DC part which represent the imposed current and an AC part which represents the frequency on which this current is imposed. The “Amplification” module amplifies the imposed current signal, measured at the Shunt resistance terminals. This amplified signal which is disturbed is transmitted to the synchronous detection (current). The “Synchronous detection” module allows the amplification of the signal coming from the DUT, and the recovery of the real and imaginary part of this signal by the synchronous detection.
3.2.1. “Power Supply” module
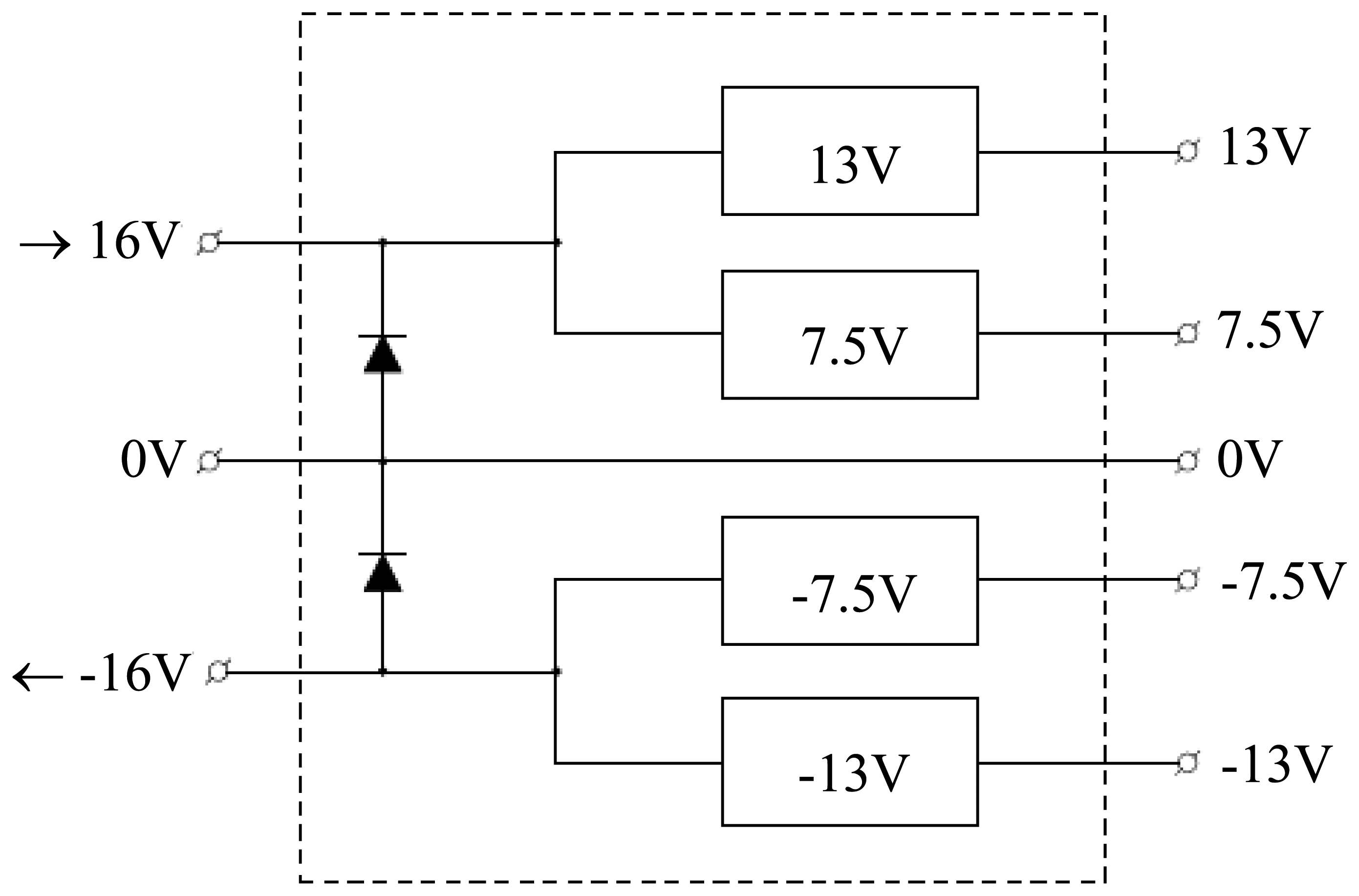
The “Power supply” module in
figure 7, manages the generation and the distribution of the various tensions which are necessary to supply the active elements of all the other modules. It transforms the tensions of ±16 V to a ±13 V and ±7.5 V tensions. Two diodes at the input allow the protection of the module in the event of a surge or a bad polarization.
We decided to create this module to allow the circuit to be autonomous and to be embedded in a vehicle. Its finality being to be an embedded system, we were to avoid being dependent on any external power supply. The external supply which provides the ±16 V can be replaced by batteries. For our tests and for the measurements, we used a simple laboratory power supply. In the future, this supply must be provided by the fuel cell.
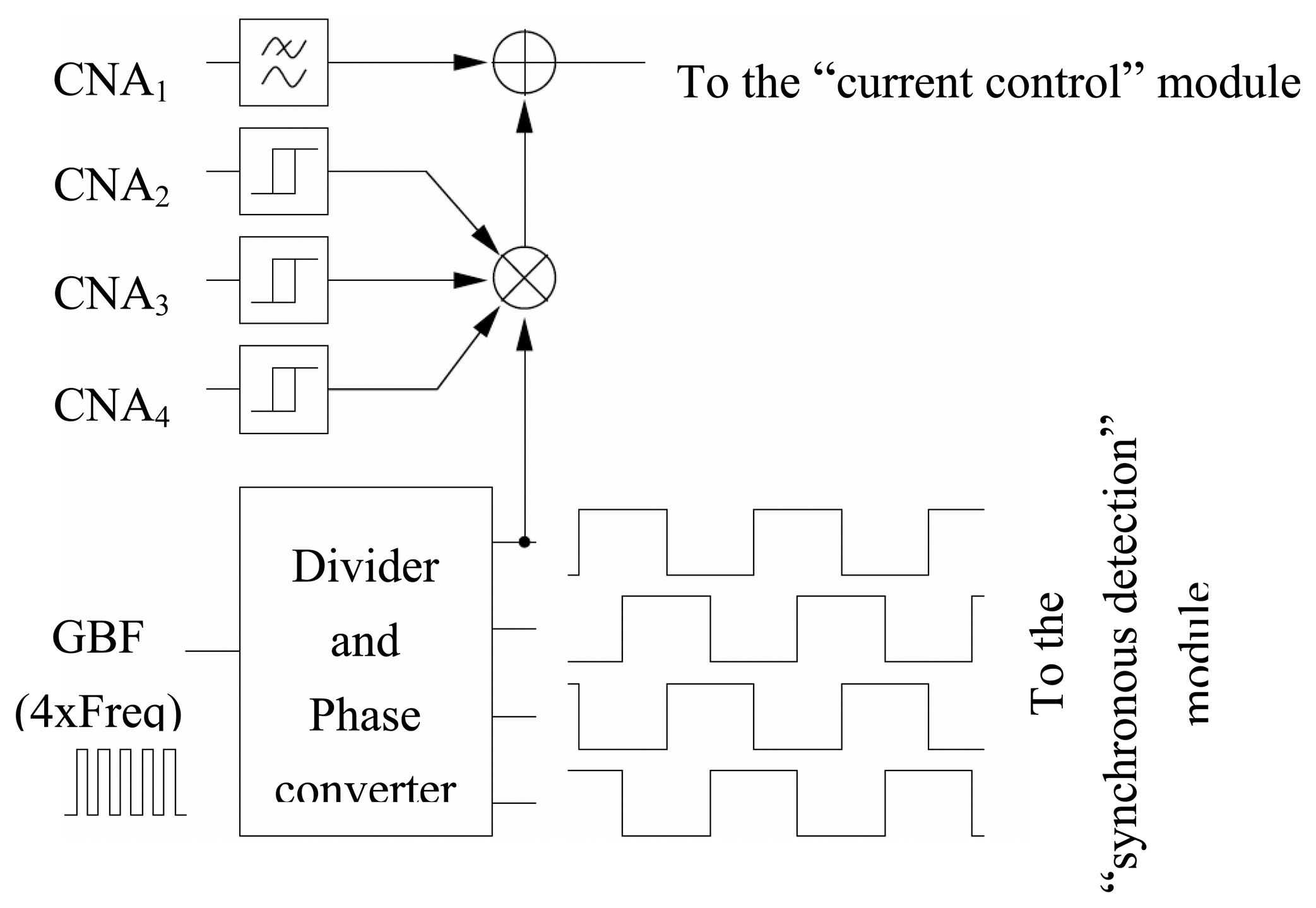
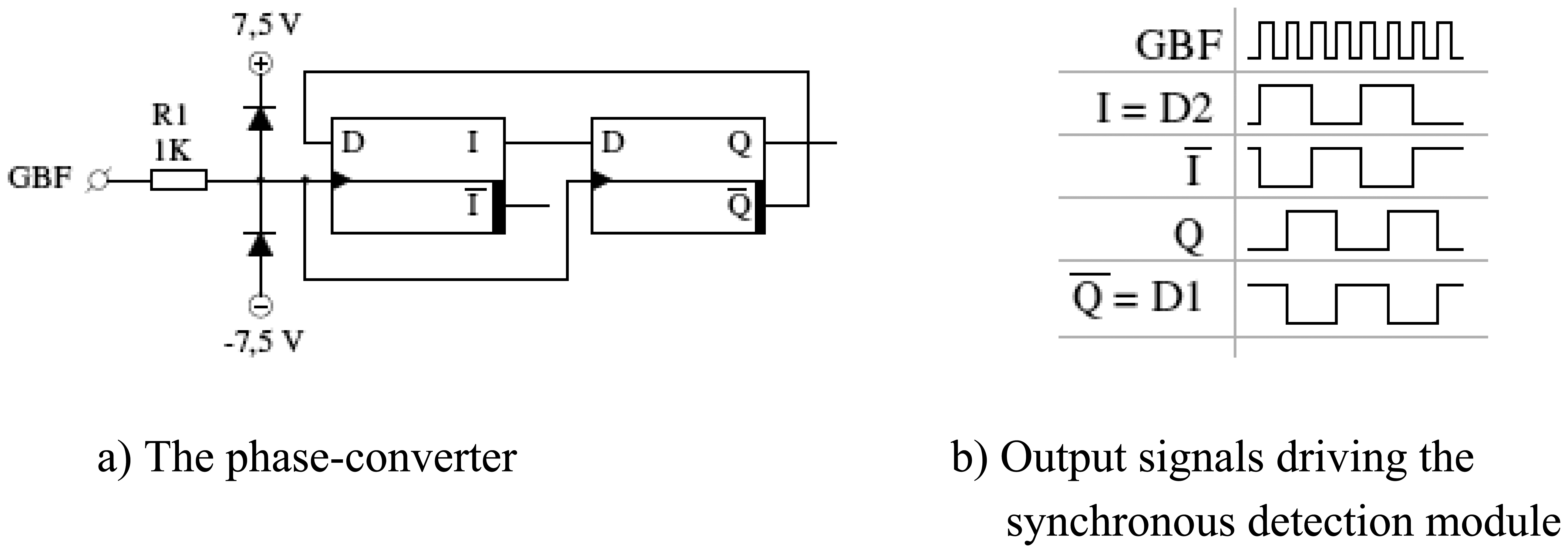
3.2.2. “Signals generator” module
The “Signals generator” module is useful like interfaces for all the input signals. It converts the square signal coming from the GBF and the tensions provided by the D/A Converter which adjusts the current and which chooses the amplification of the signal. This module amplifies and filters all the input signals. Starting from the signal provides by the GBF, it generates four square signals of the same frequency, out of phase of 0, π/2, π and 3π/2. These signals allow the commutation of the quad bilateral switch (CD4066) on the synchronous detection module. The fuel cell output current will be controlled by the CNA1 tension superimposed with one of the four outputs of the phase-converter. For that, the “Signals generator” module carries out the addition between these two signals.
The CNA2 to CNA4 tensions are used for the choice of the measuring range. The signal AC is not provided any more by the GBF, but by the output of the CMOS quad bilateral switches. Behind the phase-converter and before the adder, tension dividers (which we can select with three relays) determine three levels of amplification, allowing a measurement over three decades of impedance.
3.2.3. “Current control” module
This module regulates the current output by the fuel cell. It is a circuit which appears on page 382 of the book “The Art of Electronics” [
10]. The operational amplifier regulates the current going from DUT,POS to DUT,NEG via the MOSFET according to the V
ref tension. The adjustments and the choice of the components are made to have for a V
ref tension of 1V, an equivalent current of 1A. The tension measured on the shunt resistance terminals, is the image of the imposed current. 100mV of this tension corresponds to a current of 1A. The tension measured at the terminals of the DUT corresponds to the response in tension of the DUT to the imposed current. These two tensions will enable us to define the impedance of the DUT by using the Ohm's law, and that by making the extraction of the real and imaginary part of the current and the tension.
We can observe below in
figure 11, the results obtained by the current control module.
Figure 11.a and
figure 13.b show the signal (V
S3) obtained at the shunt resistance terminals. We have a square signal which corresponds to the current image with an amplitude of 400mV corresponding to a
4A current.
Figure 11.b and
figure 13.b show the signal (V
S2) obtained at the DUT terminals which corresponds to the response in tension of the imposed current. It has an amplitude of 200mV. With these two parameters, we can determine the real part of the impedance by dividing the tension by the current. In this case and with this measurement values, the real part is of 50mΩ.
3.2.4. “Amplification” module
This module amplifies the alternate component of the tension around the resistance of shunt before providing the signal amplified to synchronous detection. The principal constraint of this module is a weak offset of tension because this last is not filtered by synchronous detection. Moreover, amplification must be eligible in order to use all the dynamics of synchronous detection to reach a better resolution and to decrease the errors introduced by the offsets of tension. The circuit must also have an output with the reversed signal and a second with the not-reversed signal. These two signals are used for synchronous detection. The circuit is presented below in
figure 12.
Figure 13 shows the results of measurement carried out on this module. For measurement presented on
figure 13.a, the input was excited by a sinusoidal signal with an amplitude of 50mV, provided by the GBF. The amplification rate is a function of the used relay: 23 for relay 1 (range 1), 230 for relay 2 (range 2) and 2300 for relay 3 (range 3). If the third relay is open, amplification is so high that the exit becomes saturated. For measurement presented in
figure 13.b, an amplification of the signal at the shunt resistance terminals is made. Its continuous component is filtered by the input capacitive of the module before an amplification by 23. It is noticed that the square signal is rounded a little compared to former measurement. This is due to the reduced band-width of the amplification module due to the Unity Gain Bandwidth of the AOP ICL7650SCPD.
3.2.5. “Synchronous detection” module
The synchronous detection of our test bed is composed of two basic elements. These two elements obtain the same input signal, but two different signals of reference out of phase from exactly 90°. In this case, when the first phase detector has an output signal of:
the second detector presents a signal of :
at its output. Considering that:
we can calculate:
By using another law of trigonometry, we can obtain the phase of the signal:
To calculate the real and the imaginary part of the signal, it is enough to know that:
Since a synchronous detection can measure only one magnitude at the same time (either the current, or the tension), we put two of them for the measurement of the current and the tension simultaneously to determine the impedance of the DUT on load.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















