A Mobile Sensor Network System for Monitoring of Unfriendly Environments

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
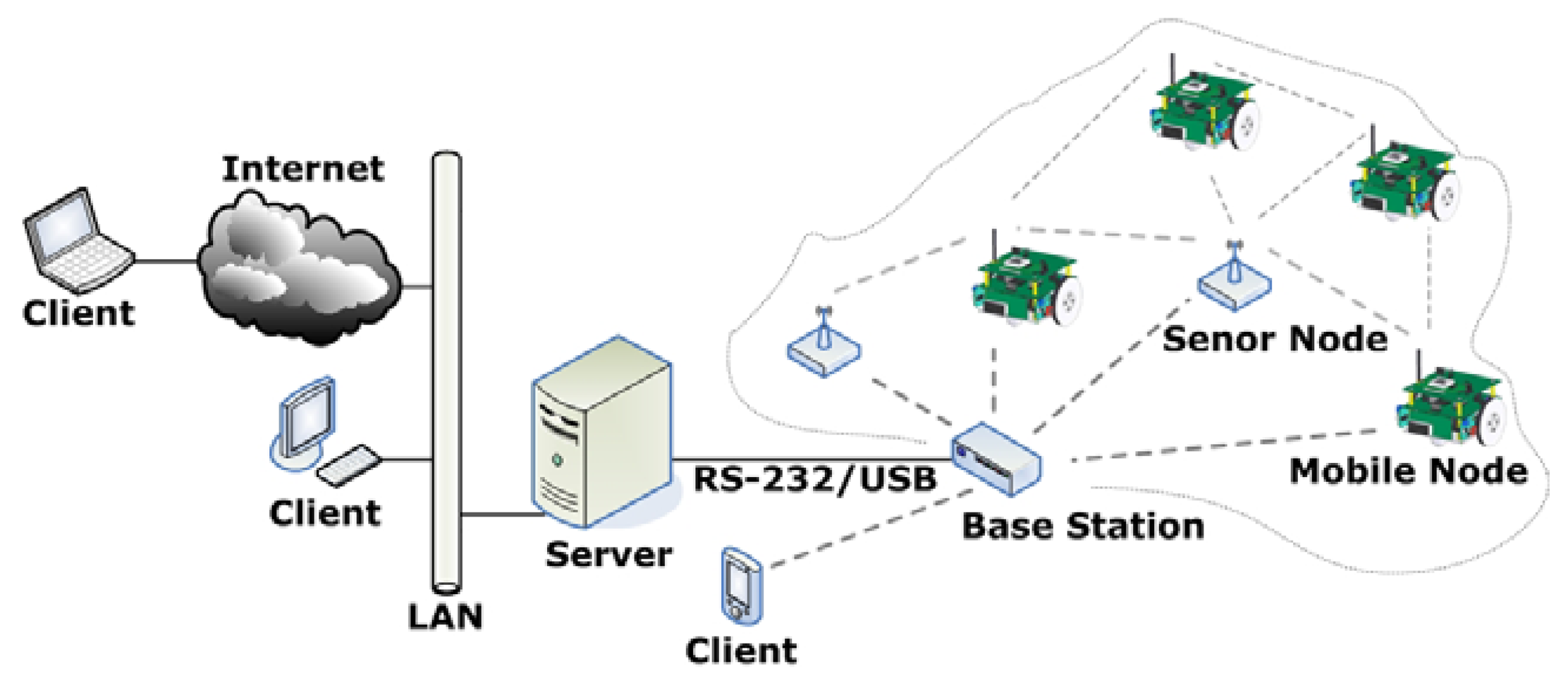
2. System Overview
3. Mobile Node Design
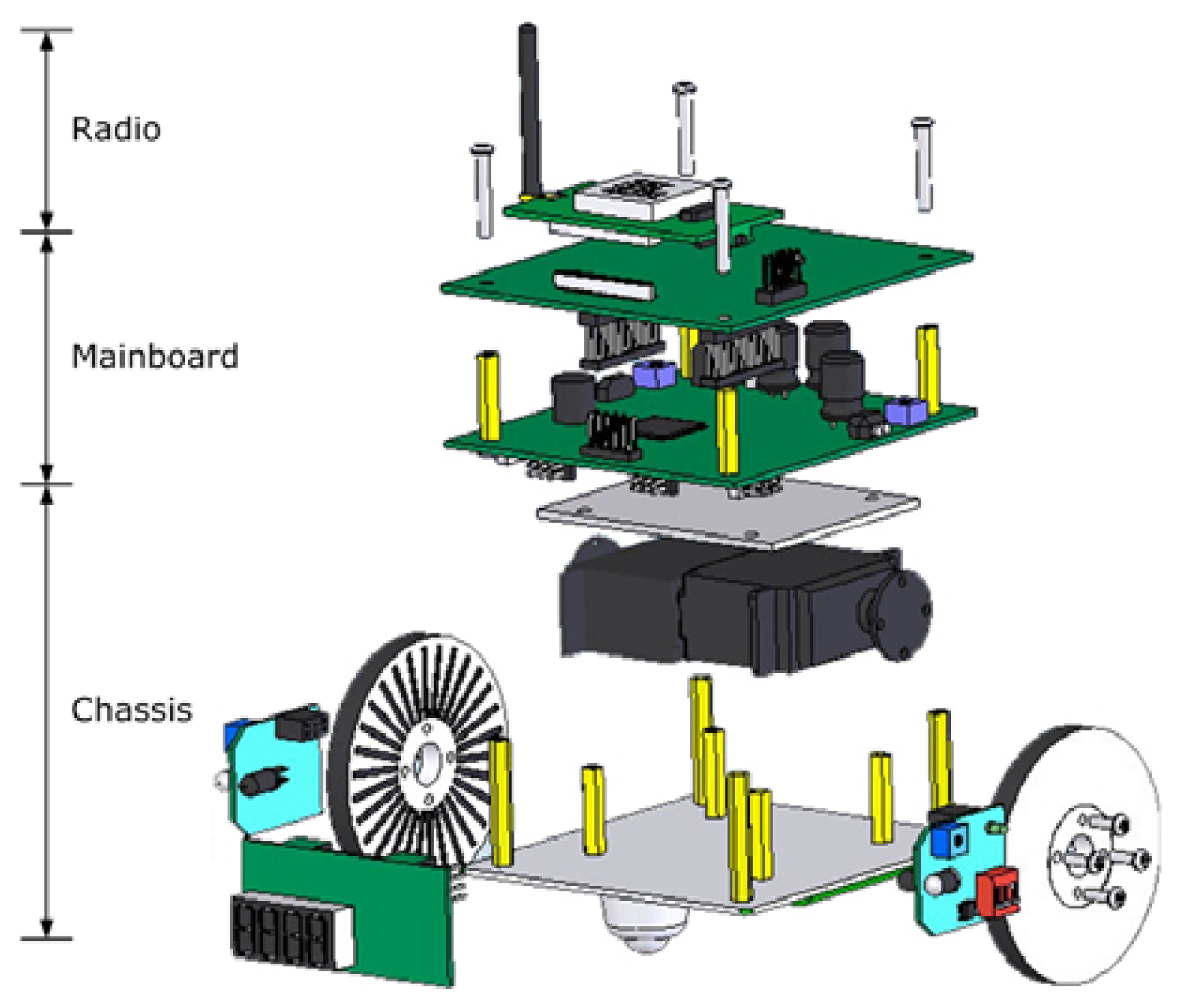
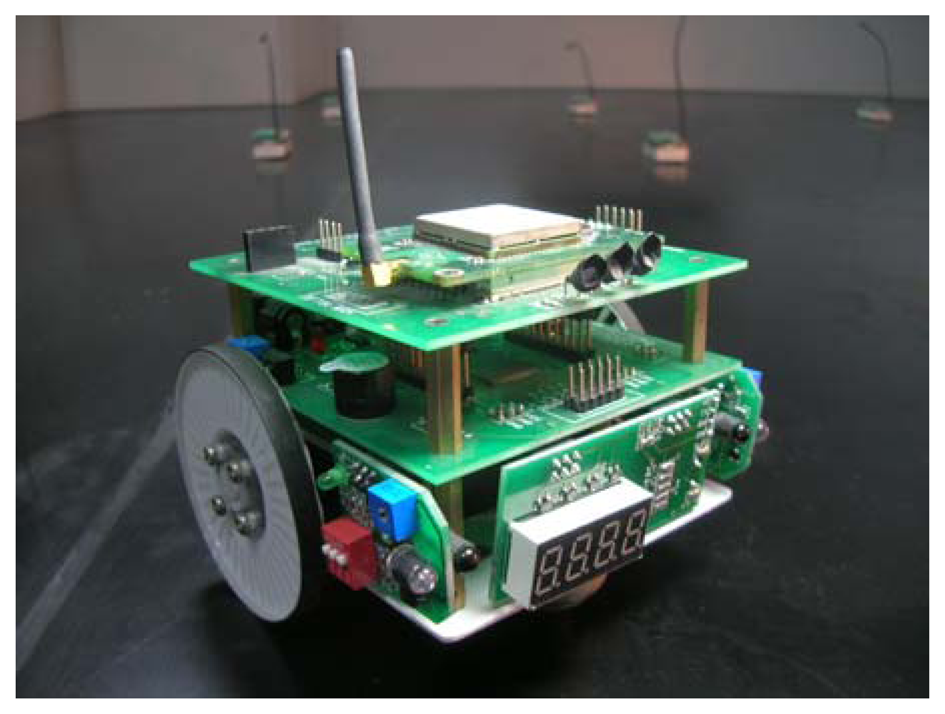
3.1. Structure Decomposition
3.2. Node Networking
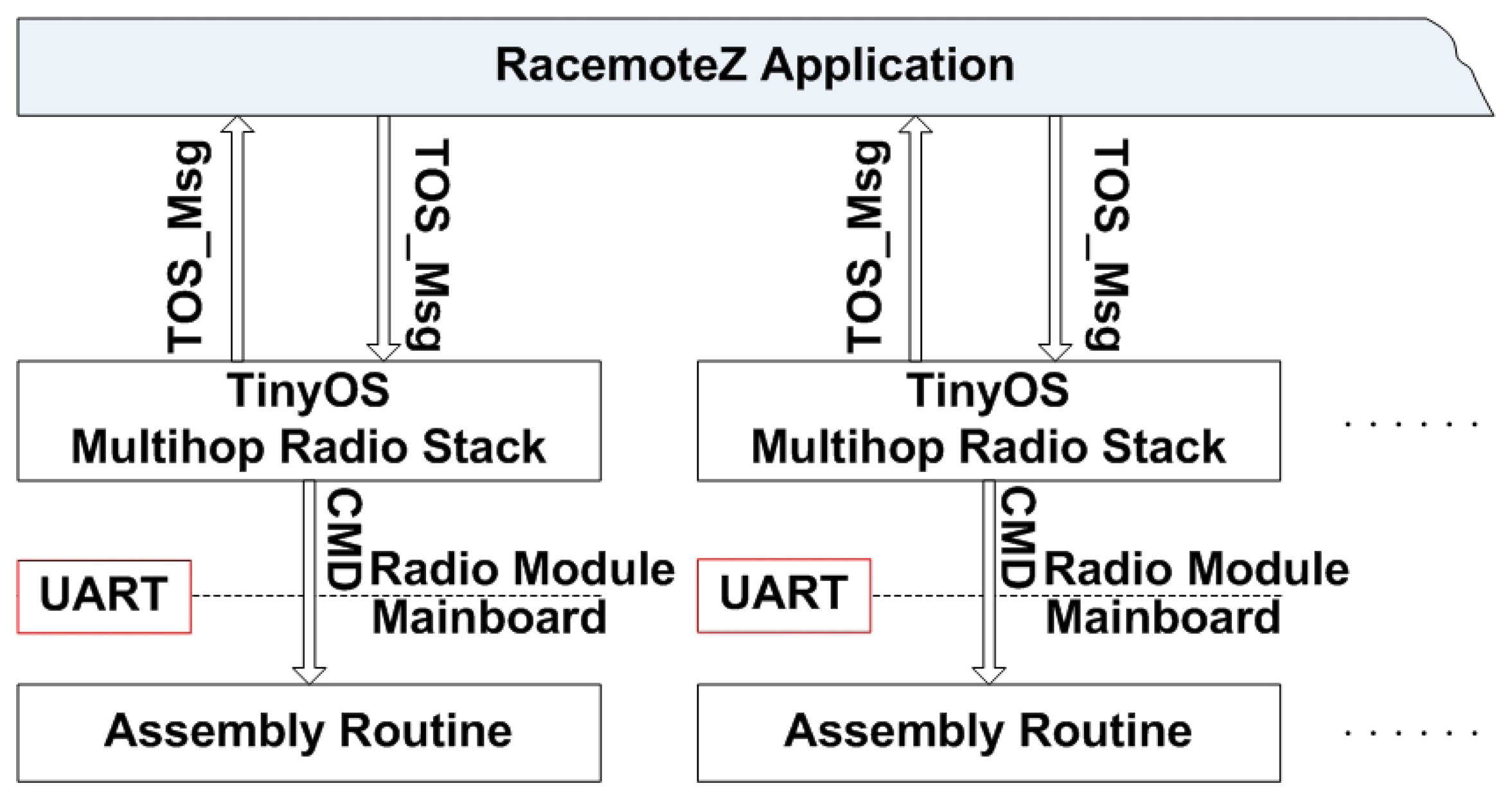
3.3. Computing Models
4. Experiments
4.1. Testbed setup
4.2. Performance Tests
4.3. Autonomous Deployment
5. Conclusions
Acknowledgments
References and Notes
- Mainwaring, A.; Polastre, J.; Szewczyk, R.; Culler, D.; Anderson, J. Wireless sensor networks for habitat monitoring. Proc. of the 1st ACM Int'l Workshop on Wireless Sensor Networks and Applications, Atlanta; 2002; pp. 88–97. [Google Scholar]
- Poduri, S.; Sukhatme, G.S. Constrained coverage for mobile sensor networks. Proc. of IEEE International Conference on Robotics and Automation, New Orleans, LA, USA; 2004; pp. 165–171. [Google Scholar]
- Sibley, G.T.; Rahimi, M.H.; Sukhatme, G.S. Robomote: a tiny mobile robot platform for large-scale sensor networks. Proc. of IEEE International Conference on Robotics and Automation, Washington DC, USA, Sep 2002; pp. 1143–1148.
- Bergbreiter, S.; Pister, K.S.J. CotsBots: an off-the-shelf platform for distributed robotics. Proc. of IEEE /RSJ International Conference on Intelligent Robots and Systems, Las Vegas, Nevada, USA; 2003; pp. 1632–1637. [Google Scholar]
- Navarro-Serment, L.E.; Grabowski, R.; Paredis, C.J.J.; Khosla, P.K. Millibots: the development of a framework and algorithms for a distributed heterogeneous robot team. IEEE Robot. Autom. Mag. 2002, 9, 31–40. [Google Scholar]
- McMickell, M.B.; Goodwine, B.; Montestruque, L.A. MICAbot: a robotic platform for large-scale distributed robotics. Proc. of IEEE International Conference on Robotics and Automation, Taipei, Taiwan, September 2003; pp. 1600–1605.
- Song, G.; Zhuang, W.; Wei, Z.; Song, A. Racemote: a mobile node for wireless sensor networks. Proc. of IEEE International Conference on Sensors, Daegu, Korea, October 2006; pp. 781–784.
- Sheu, J.-P.; Hsieh, K.-Y.; Cheng, P.-W. Design and implementation of mobile robot for nodes replacement in wireless sensor networks. J. Inf. Sci. Eng. 2008, 24, 393–410. [Google Scholar]
- Xia, F.; Tian, Y.; Li, Y.; Sun, Y. Wireless sensor/actuator network design for mobile control applications. Sensors 2007, 7, 2157–2173. [Google Scholar]
- Song, G.; Song, A.; Huang, W. Distributed measurement system based on networked smart sensors with standardized interfaces. Sens Actuat. A Phys. 2005, 120, 147–153. [Google Scholar]
- Balkcom, D.; Mason, M. Time optimal trajectories for bounded velocity differential drive robots. Proc. of IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, April 2000; pp. 2499–2504.
- TinyOS Community Forum. An open-source OS for the networked sensor regime. Available online: http://www.tinyos.net.
- Wang, X.; Ma, J.; Wang, S.; Bi, D. Distributed particle swarm optimization and simulated annealing for energy-efficient coverage in wireless sensor networks. Sensors 2007, 7, 628–648. [Google Scholar]
- Chen, J.; Li, S.; Sun, Y. Novel deployment schemes for mobile sensor networks. Sensors 2007, 7, 2907–2919. [Google Scholar]



















© 2008 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Song, G.; Zhou, Y.; Ding, F.; Song, A. A Mobile Sensor Network System for Monitoring of Unfriendly Environments. Sensors 2008, 8, 7259-7274. https://doi.org/10.3390/s8117259
Song G, Zhou Y, Ding F, Song A. A Mobile Sensor Network System for Monitoring of Unfriendly Environments. Sensors. 2008; 8(11):7259-7274. https://doi.org/10.3390/s8117259
Chicago/Turabian StyleSong, Guangming, Yaoxin Zhou, Fei Ding, and Aiguo Song. 2008. "A Mobile Sensor Network System for Monitoring of Unfriendly Environments" Sensors 8, no. 11: 7259-7274. https://doi.org/10.3390/s8117259
APA StyleSong, G., Zhou, Y., Ding, F., & Song, A. (2008). A Mobile Sensor Network System for Monitoring of Unfriendly Environments. Sensors, 8(11), 7259-7274. https://doi.org/10.3390/s8117259