Design of a Sensor Based on Plastic Optical Fibre (POF) to Measure Fluid Flow and Turbidity



Abstract
:
1. Introduction
- By differential pressure
- By mechanical driver
- By electromagnetic driver
- By ultrasonic waves
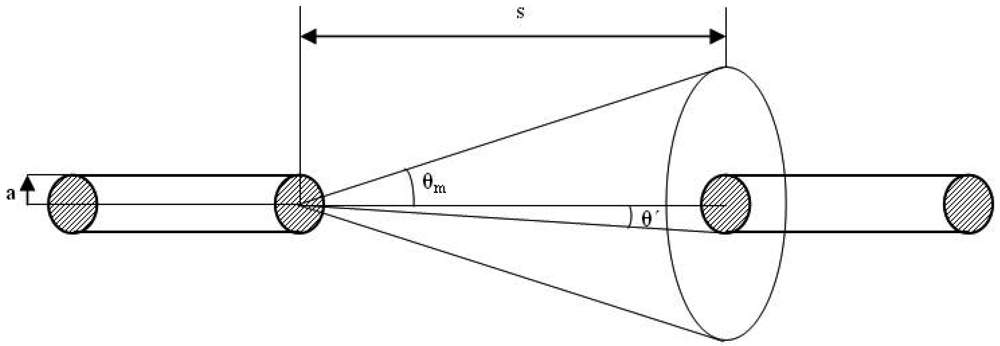
2. Operating Principle
3. System description
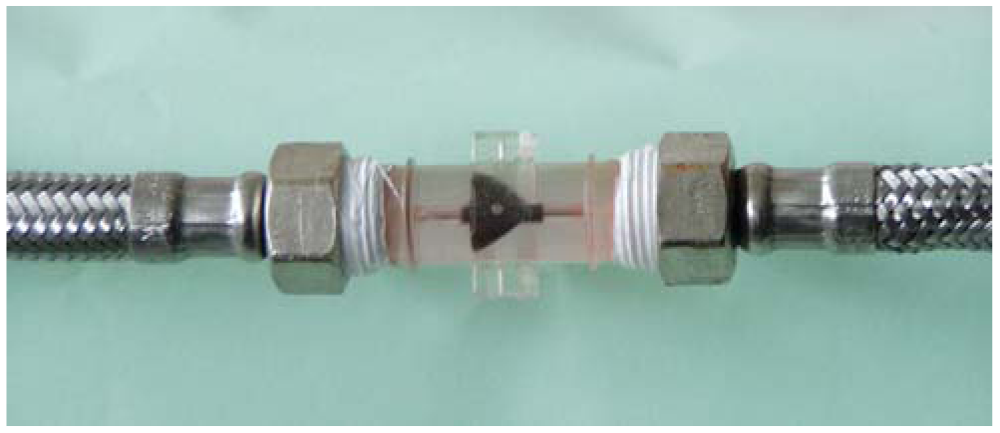
3.1. Mechanical part
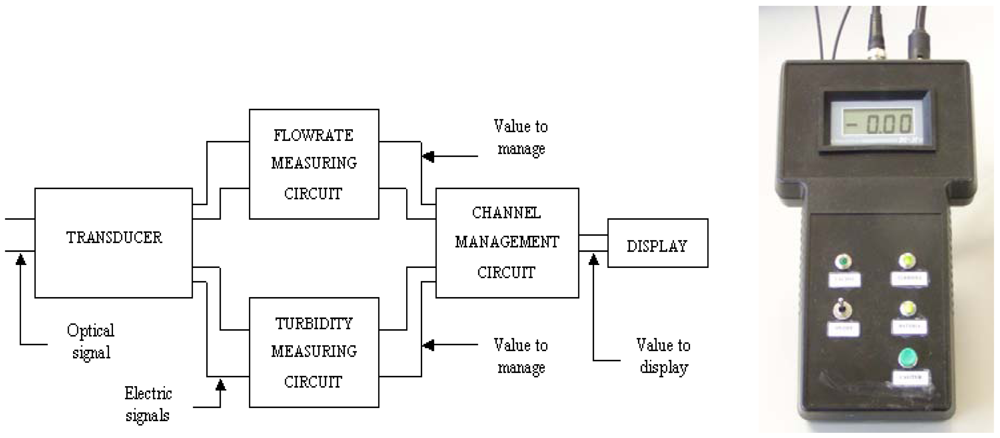
3.2. Optoelectronic Part
4. Results
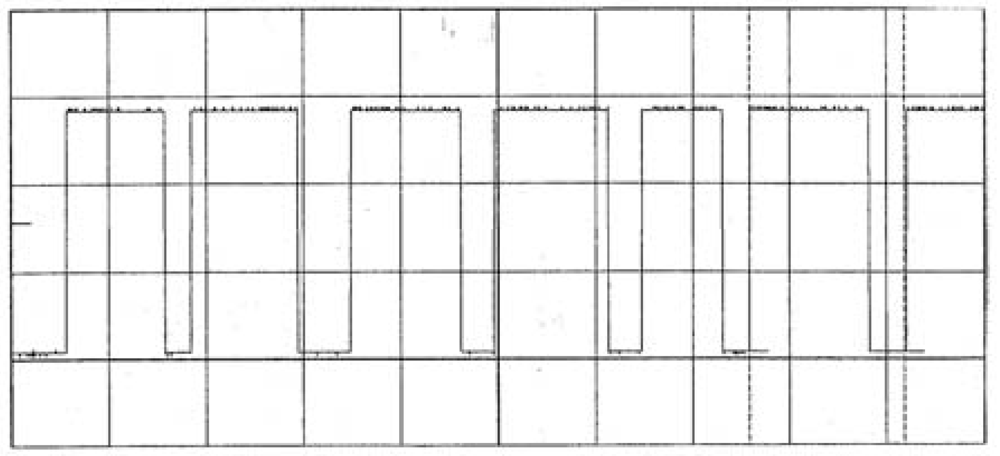
4.1. Flow Rate Measuring Tests
4.2. Turbidity Measurement Tests
5. Conclusions
Acknowledgments
References
- Naritorni, M. CYTOP Amorphous Fluoropolymers for low loss POF. POF Asia Pacific Forum 1996. [Google Scholar]
- Steiger, U. Sensor properties and applications of FOPs. Proceedings of the Seventh International Conference on Plastic Optical Fibres and Applications POF′98, Berlin, Germany; 1998p; pp. 171–177. [Google Scholar]
- Glass, A.M.; DiGiovanni, D.J.; Strasser, T.A.; Stenz, A.J.; Slusher, R.E.; White, A.E.; Kortan, A.R.; Eggleton, B.J. Advances in fiber optics. Bell Labs Technol. J. 2000, 5, 168–182. [Google Scholar]
- Bartlett, R.J.; Philip-Chandy, R.; Eldridge, P.; Merchant, D.F.; Morgan, R.; Scully, P.J. Plastic optical fibre sensors and devices. InstMC 2000, 22, 431–457. [Google Scholar]
- Zubia, J.; Azkue, J. POFs: Plastic Optical Fibres: An introduction to their technological process and applications. Opt. Fibre Technol. 2001, 7, 101–140. [Google Scholar]
- Zhou, Q. Development of chemical sensors using plastic optical fibers. In SPIE Proc. On Plastic Optical Fibres; Boston MA, USA, 1991; Volume 1592, pp. 108–113. [Google Scholar]
- Chandry, R.P.; Scully, P.J.; Whitworth, C.; Fearnside, D. Biomarkers and Biomonitors as Indicators of Environmental Change. Annual Meeting of the International Association for Great Lakes Research, Ontario, Canada; 1998. [Google Scholar]
- Eden, G.E. The measurement of turbidity in water. Proc.Soc.Water Treat. Exam. 1965, 14–27. [Google Scholar]
- Standard methods for the examination of water and wastewater, 14th Edition ed; American Public Health Association (APHA): Washington, DC. USA, 1976; p. 131.
- Standard methods for the examination of water and wastewater, 17th Edition ed; American Public Health Association (APHA): Washington, DC. USA, 1989; pp. 2–12.
- Garcia Gutierrez, L. Conceptos básicos en la medida de caudal. In La medida del caudal; Primera Edición, Aenor: Madrid, SPAIN, 1997; pp. 21–45. [Google Scholar]
- Miller, R.W. Measurement. In Flow Measurement Engineering Handbook, Third Edition ed; McGraw-Hill: New York, USA, 1996; pp. 3.1–3.48. [Google Scholar]
- Chin-Lin Chen. Power Coupled into Fibers. In Elements of Optoelectronics and Fibre Optics; Irwin: Madrid, Spain, 1996; pp. 508–512.
- Snyder, A.W.; Love, J.D. Material Absorption. In Optical Waveguide Theory; Chapman and Hall: London, Great Britain, 1983; pp. 120–124. [Google Scholar]
- Martín Pereda, J.A. Conexiones entre fibras. In Sistemas y Redes Ópticas de Comunicaciones, 1ªEdición; Capella, I., Ed.; Pearson Prentice Hall: Madrid, Spain, 2004; pp. 97–123. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stopcock open (f = 40Hz) | Stopcock semiopen I (f = 32Hz) | Stopcock semiopen II (f = 23Hz) | Stopcock semiclosed I (f = 14Hz) | Stopcock semiclosed II (f = 11Hz) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| N° min. | GPI (l/m) | F.O.P. (l/m) | GPI (l/m) | F.O.P. (l/m) | GPI (l/m) | F.O.P. (l/m) | GPI (l/m) | F.O.P. (l/m) | GPI (l/m) | F.O.P. (l/m) |
| 1 | 3.75 | 3.70-3.80 | 3.00 | 2.95-3.05 | 2.17 | 2.10-2.20 | 1.21 | 1.20-1.28 | 0.84 | 0.90- 0.93 |
| 2 | 7.47 (3.72) | 3.70-3.80 | 6.02 (3.02) | 2.95-3.05 | 4.34 (2.17) | 2.10-2.20 | 2.43 (1.22) | 1.20-1.28 | 1.68 (0.84) | 0.90- 0.93 |
| 3 | 11.22 (3.75) | 3.70-3.80 | 9.04 (3.02) | 2.95-3.05 | 6.47 (2.13) | 2.10-2.20 | 3.64 (1.21) | 1.20-1.28 | 2.53 (0.85) | 0.90- 0.93 |
| 4 | 14.94 (3.72) | 3.70-3.80 | 12.00 (2.96) | 2.95-3.05 | 8.60 (2.13) | 2.10-2.20 | 4.85 (1.21) | 1.20-1.28 | 3.37 (0.84) | 0.90- 0.93 |
| 5 | 18.65 (3.71) | 3.70-3.80 | 15.00 (3.00) | 2.95-3.05 | 10.75 (2.15) | 2.10-2.20 | 6.09 (1.24) | 1.20-1.28 | 4.21 (0.84) | 0.90- 0.93 |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Aiestaran, P.; Arrue, J.; Zubia, J. Design of a Sensor Based on Plastic Optical Fibre (POF) to Measure Fluid Flow and Turbidity. Sensors 2009, 9, 3790-3800. https://doi.org/10.3390/s90503790
Aiestaran P, Arrue J, Zubia J. Design of a Sensor Based on Plastic Optical Fibre (POF) to Measure Fluid Flow and Turbidity. Sensors. 2009; 9(5):3790-3800. https://doi.org/10.3390/s90503790
Chicago/Turabian StyleAiestaran, Pedro, Jon Arrue, and Joseba Zubia. 2009. "Design of a Sensor Based on Plastic Optical Fibre (POF) to Measure Fluid Flow and Turbidity" Sensors 9, no. 5: 3790-3800. https://doi.org/10.3390/s90503790
APA StyleAiestaran, P., Arrue, J., & Zubia, J. (2009). Design of a Sensor Based on Plastic Optical Fibre (POF) to Measure Fluid Flow and Turbidity. Sensors, 9(5), 3790-3800. https://doi.org/10.3390/s90503790