A Portable and Autonomous Magnetic Detection Platform for Biosensing

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
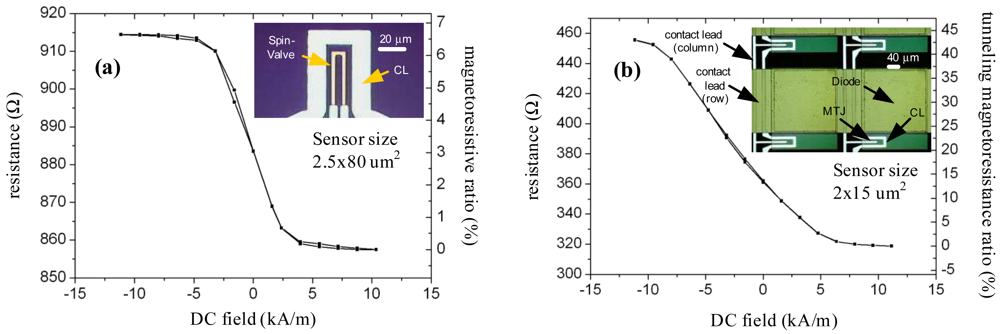
2. Magnetoresistive biochips: characteristics and specifications
3. System architecture and circuit design
3.1. Sensing and processing module
3.2. Autonomous communication module and analyzer module
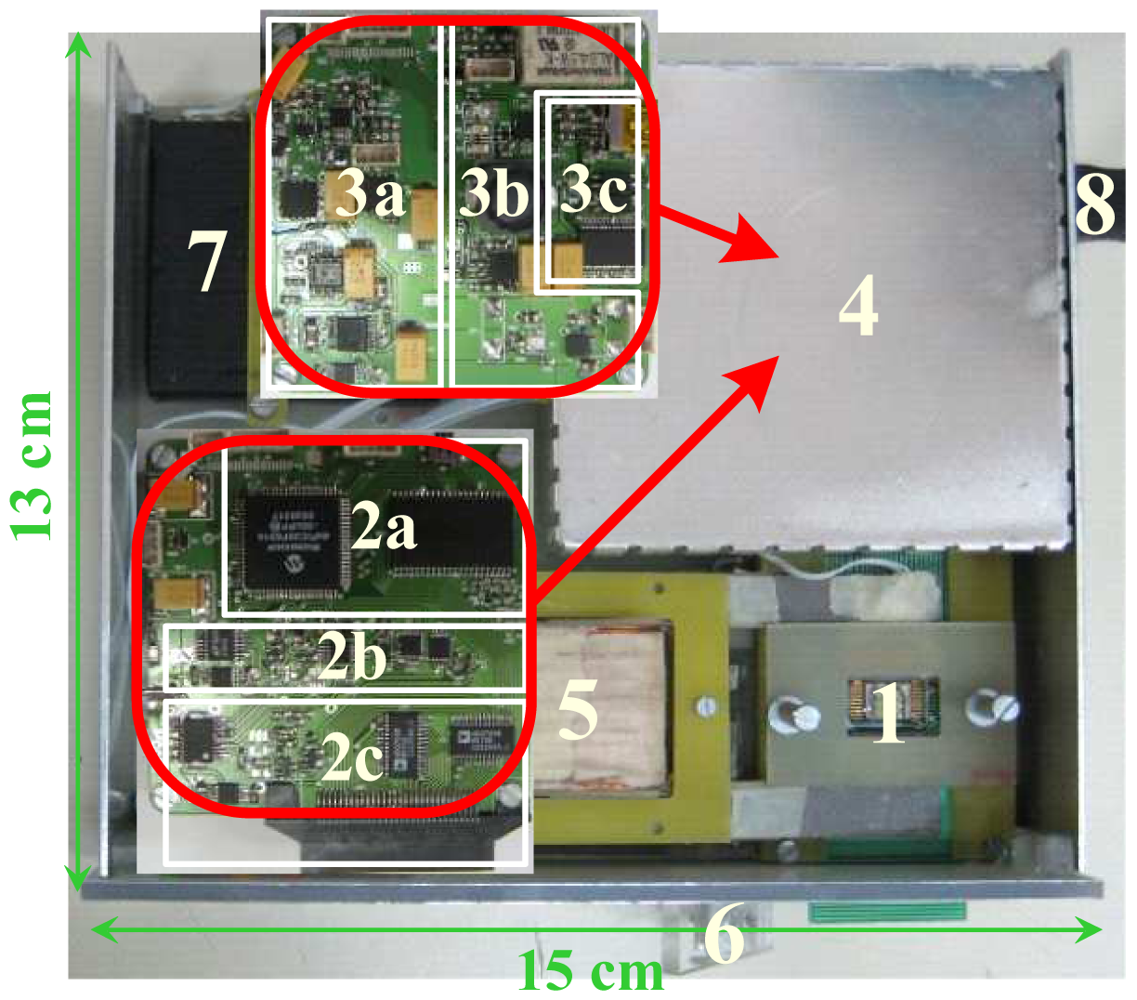
4. Platform prototype
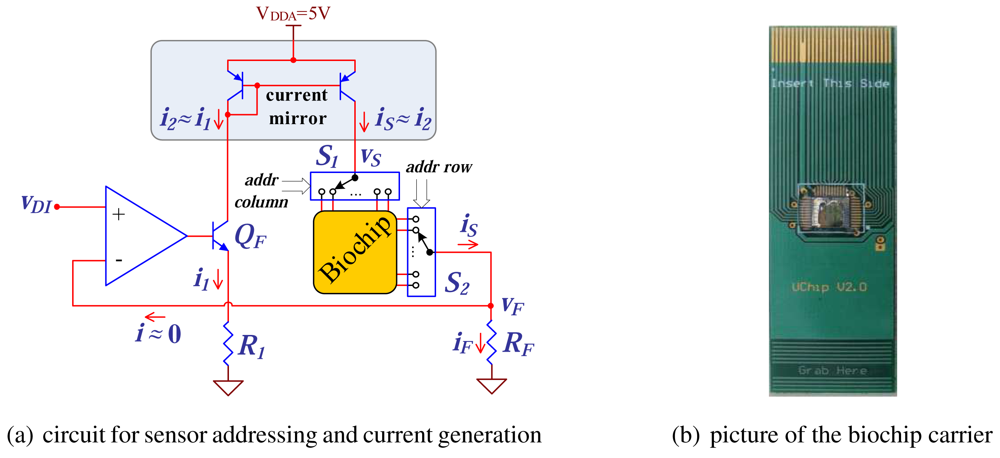
4.1. Sensor addressing and drive signal generation
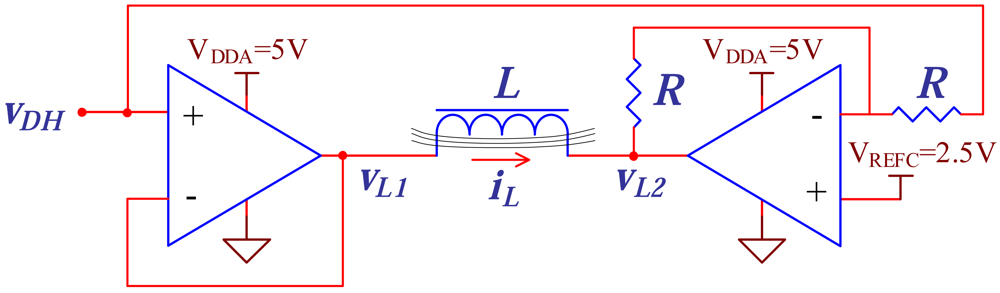
4.2. Signal conditioning and acquisition
4.3. Autonomous communication module and user interface
5. Experimental results
5.1. Noise analysis
5.2. Nanoparticle detection
5.3. Biomolecular recognition detection
6. Conclusions
Acknowledgments
References and Notes
- Geschke, O.; Klank, H.; Telleman, P. (Eds.) Microsystems Engineering of Lab-on-a-chip Devices; Wiley-VCH Verlag GmbH & Co. KgaA: Weinheim, Germany, 2004.
- Baselt, D.R.; Lee, G.U.; Natesan, M.; Metzger, S.W.; Sheehan, P.E.; Colton, R.J. A biosensor based on magnetoresistance technology. Biosens. Bioelectron. 1998, 13, 731–739. [Google Scholar]
- Graham, D.L.; Ferreira, H.A.; Freitas, P.P. Magnetoresistive-based biosensors and biochips: a review. Trends Biotechnol. 2004, 22, 455–462. [Google Scholar]
- Brückl, H.; Panhorst, M.; Schotter, J.; Kamp, P.B.; Becker, A. Magnetic particles as markers and carriers of biomolecules. IEE Proc. -Nanobiotechnol 2005, 152, 41–46. [Google Scholar]
- Wang, S.X.; Guanxiong, L. Advances in giant magnetoresistance biosensors with magnetic nanoparticle Tags: review and outlook. IEEE Trans. Magn. 2008, 44, 1687–1702. [Google Scholar]
- Piedade, M.; Sousa, L.A.; de Almeida, T.M.; Germano, J.; da Costa, B.A.; Lemos, J.M.; Freitas, P.P.; Ferreira, H.A.; Cardoso, F.A. A new hand-held microsystem architecture for biological analysis. IEEE Trans. Circuits Syst. Regul. Pap. 2006, 53, 2384–2395. [Google Scholar]
- Schotter, J.; Kamp, P.B.; Becker, A.; Pühler, A.; Reiss, G.; Brückl, H. Comparison of a prototype magnetoresistive biosensor to standard fluorescent DNA detection. Biosens. Bioelectron. 2004, 19, 1149–1156. [Google Scholar]
- de Boer, B.M.; Kahlman, J.A.H.M.; Jansen, T.P.G.H.; Duric, H.; Veen, J. An integrated and sensitive detection platform for magneto-resistive biosensors. Biosens. Bioelectron. 2007, 22, 2366–2370. [Google Scholar]
- Han, S.-J.; Xu, L.; Yu, H.; Wilson, R.J.; White, R.L.; Pourmand, N.; Wang, S.X. CMOS Integrated DNA Microarray Based on GMR Sensors. Proceedings of IEEE International Electron Devices Meeting (IEDM), San Francisco, CA, USA, December 11-13, 2006; pp. 1–4.
- Tamanaha, C.R.; Mulvaney, S.P.; Rife, J.C.; Whitman, L.J. Magnetic labeling, detection, and system integration. Biosens. Bioelectron. 2008, 24, 1–13. [Google Scholar]
- Shen, W.; Schrag, B.D.; Carter, M.J.; Xie, J.; Xu, C.; Sun, S.; Xiao, G. Detection of DNA labeled with magnetic nanoparticles using MgO-based magnetic tunnel junction sensors. J. Appl. Phys. 2008, 103, 07A306. [Google Scholar]
- Freitas, P.P.; Ferreira, H.A.; Graham, D.L.; Clarke, L.A.; Amaral, M.D.; Martins, V.; Fonseca, L.; Cabral, J.S. Magnetoresistive DNA chips. In Magnetoelectronics; Johnson, M., Ed.; Elsevier Inc.: Oxford, UK, 2004; pp. 331–374. [Google Scholar]
- Cardoso, F.A.; Ferreira, H.A.; Conde, J.P.; Freitas, P.P.; Vidal, D.; Germano, J.; Sousa, L.; Piedade, M.S.; Costa, B.A.; Lemos, J.M. Diode magnetic tunnel junction cell for fully scalable matrix-based biochip. J. Appl. Phys. 2006, 99, 08B307. [Google Scholar]
- Cho, Y.-K.; Kim, S.; Kim, Y.A.; Lim, H.K.; Lee, K.; Yoon, D.; Lim, G.; Pak, Y.E.; Ha, T.H.; Kim, K. Characterization of DNA immobilization and subsequent hybridization using in situ quartz crystal microbalance, fluorescence spectroscopy, and surface plasmon resonance. J. Colloid Interface Sci. 2004, 278, 44–52. [Google Scholar]
- Sousa, R.C.; Freitas, P.P.; Chu, V.; Conde, J.P. Vertical integration of a spin dependent tunnel junction with an amorphous Si diode for MRAM application. IEEE Trans. Magn. 1999, 35, 2832–2834. [Google Scholar]
- Cardoso, F.A.; Germano, J.; Ferreira, R.; Cardoso, S.; Martins, V.C.; Freitas, P.P.; Piedade, M.S.; Sousa, L. Detection of 130 nm magnetic particles by a portable electronic platform using spin valve and magnetic tunnel junction sensors. J. Appl. Phys. 2008, 103, 07A310. [Google Scholar]
- Cardoso, F.A.; Ferreira, R.; Cardoso, S.; Conde, J.P.; Chu, V.; Freitas, P.P.; Germano, J.; Almeida, T.; Sousa, L.; Piedade, M.S. Noise characteristics and particle detection limits in diode+MTJ matrix elements for biochip applications. IEEE Trans. Magn. 2007, 43, 2403–2405. [Google Scholar]
- Almeida, T.M.; Piedade, M.S.; Sousa, L.; Germano, J.; Lopes, P.A.C.; Cardoso, F.A.; Freitas, P.P. On the modelling of new tunnel junction magnetoresisitive biosensors. IEEE Trans. Instrum. Meas. 2009, in press. [Google Scholar]
- Stallings, W. Cryptography and Network Security: Principles and Practices; Prentice Hall, Inc.: New Jersey, USA, 2006. [Google Scholar]
- Ferreira, H.A.; Cardoso, F.A.; Ferreira, R.; Cardoso, S.; Freitas, P.P. Magnetoresistive DNA chips based on ac field focusing of magnetic labels. J. Appl. Phys. 2006, 99, 08P105. [Google Scholar]
- Conn, R. A brief dive into .NET. Proceedings of the 43rd Annual Southeast Regional Conference, Kennesaw, GA, USA; 2005; pp. 21–22. [Google Scholar]
- Lopes, P.A.C.; Germano, J.; Almeida, T.M.; Sousa, L.; Piedade, M.S.; Cardoso, F.A.; Ferreira, H.A.; Freitas, P.P. Measuring and extraction of biological information on new handheld biochip-based microsystem. IEEE Trans. Instrum. Meas. 2009, in press. [Google Scholar]
- Martins, V.C.; Cardoso, FA.; Germano, J.; Cardoso, S.; Sousa, L.; Piedade, M.; Freitas, P.P.; Fonseca, L.P. Femtomolar limit of detection with a magnetoresistive biochip. Biosens. Bioelectron. 2009, 24, 2690–2695. [Google Scholar]











© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Germano, J.; Martins, V.C.; Cardoso, F.A.; Almeida, T.M.; Sousa, L.; Freitas, P.P.; Piedade, M.S. A Portable and Autonomous Magnetic Detection Platform for Biosensing. Sensors 2009, 9, 4119-4137. https://doi.org/10.3390/s90604119
Germano J, Martins VC, Cardoso FA, Almeida TM, Sousa L, Freitas PP, Piedade MS. A Portable and Autonomous Magnetic Detection Platform for Biosensing. Sensors. 2009; 9(6):4119-4137. https://doi.org/10.3390/s90604119
Chicago/Turabian StyleGermano, José, Verónica C. Martins, Filipe A. Cardoso, Teresa M. Almeida, Leonel Sousa, Paulo P. Freitas, and Moisés S. Piedade. 2009. "A Portable and Autonomous Magnetic Detection Platform for Biosensing" Sensors 9, no. 6: 4119-4137. https://doi.org/10.3390/s90604119
APA StyleGermano, J., Martins, V. C., Cardoso, F. A., Almeida, T. M., Sousa, L., Freitas, P. P., & Piedade, M. S. (2009). A Portable and Autonomous Magnetic Detection Platform for Biosensing. Sensors, 9(6), 4119-4137. https://doi.org/10.3390/s90604119