Smart Glasses-Based Personnel Proximity Warning System for Improving Pedestrian Safety in Construction and Mining Sites


Abstract
:1. Introduction
2. Methods
2.1. Development of Personal PWS Using Smart Glasses
2.2. Performance Assessment of Smart Glasses-Based Personal PWS
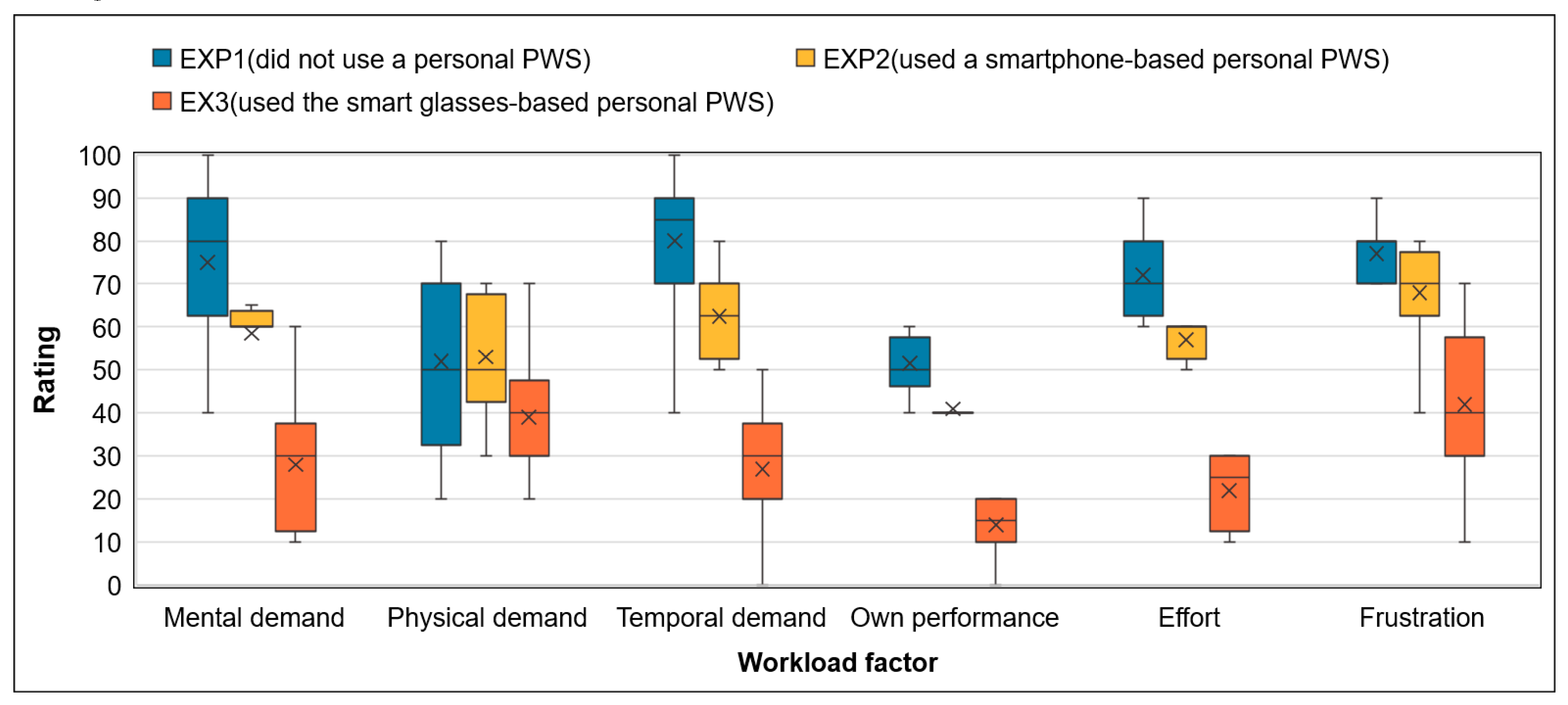
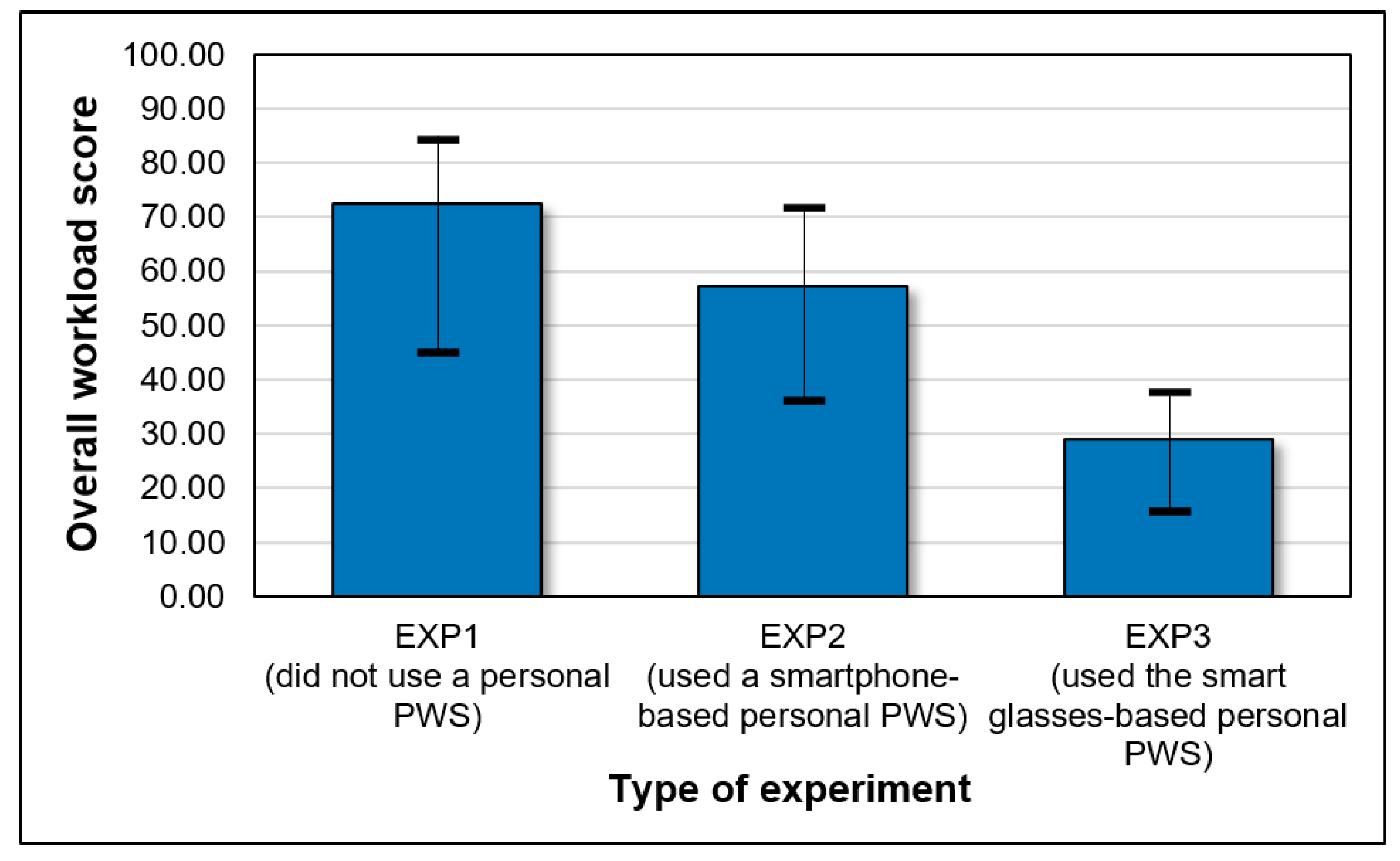
2.3. Subjective Workload Assessment of Smart Glasses-Based Personal PWS
- Mental demand: How much mental and cognitive skills were required to perform this task?
- Physical demand: How much physical ability was required to perform this task?
- Temporal demand: How much time pressure did you feel due to the rate or pace at which you performed multiple tasks?
- Own performance: How successfully do you think you have achieved the goal of this task?
- Effort: How much mental and physical efforts were required to achieve your work aims?
- Frustration level: How many uncomfortable feelings (stress, anger) did you feel while performing this task?
3. Results
4. Discussion
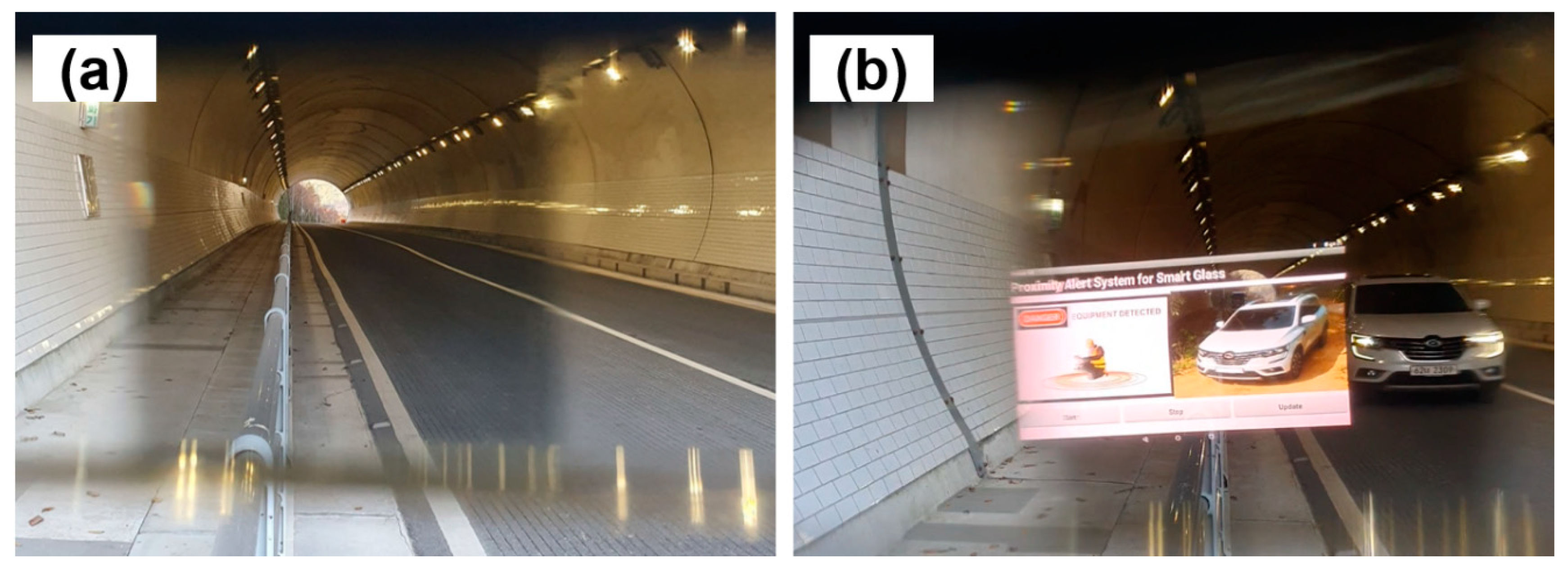
4.1. Utilization of Smart Glasses-Based Personal PWS in Underground Tunnel
4.2. Advantages and Disadvantages of Smart Glasses-Based Personal PWS
4.3. Comparision of Smart Glasses-Based Personal PWS with the Existing System
- True positive: The alert was activated before the equipment approached the warning zone.
- False negative: The alert was not activated even after the equipment entered the warning zone.
- Recall: Ratio of true positives to the sum of true positives and false negatives.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- U.S. Bureau of Labor Statistics. Available online: https://www.bls.gov/iif/oshwc/cfoi/cftb0313.htm (accessed on 21 January 2020).
- Eurostat. Available online: https://ec.europa.eu/eurostat/web/health/data/database (accessed on 21 January 2020).
- Korea Occupational Safety and Health Agency (KOSHA). Available online: http://www.kosha.or.kr/english/about/annualReport1.do (accessed on 12 February 2020).
- Mine Safety and Health Administration (MSHA). Available online: https://www.msha.gov/proximity-detectioncollision-warning-information-technical-support (accessed on 21 January 2020).
- Sabniveesu, V.; Kavuri, A.; Kavi, R.; Kulathumani, V.; Kecojevic, V.; Nimbarte, A. Use of wireless, ad-hoc networks for proximity warning and collision avoidance in surface mines. Int. J. Min. Reclam. Environ. 2015, 29, 331–346. [Google Scholar] [CrossRef]
- HazardAVERT® Surface and Underground. Available online: https://www.strataworldwide.com/proximity-detection/surface-and-underground (accessed on 21 January 2020).
- MineAlert™ Collision Awareness System (CAS). Available online: https://www.modularmining.com/our-solutions/safety/ (accessed on 21 January 2020).
- GE Mining Product Overview. Available online: https://www.ge.com/digital/sites/default/files/download_assets/GE-Digital-Mine-Collision-Avoidance-System-datasheet.pdf (accessed on 21 January 2020).
- Newtrax Proximity Detection System. Available online: https://www.newtrax.com/solution/proximity-detection-collision-avoidance/ (accessed on 21 January 2020).
- Schiffbauer, W.H. Active proximity warning system for surface and underground mining applications. Min. Eng. 2002, 54, 40–48. [Google Scholar]
- Teizer, J. Magnetic field proximity detection and alert technology for safe heavy construction equipment operation. In Proceedings of the 32nd International Symposium on Automation and Robotics in Construction and Mining: Connected to the Future, Oulu, Finland, 15–18 June 2015; Curran Associates, Inc.: Red Hook, NY, USA, 2015. [Google Scholar]
- Nieto, A.; Miller, S.; Miller, R. GPS proximity warning system for at-rest large mobile equipment. Int. J. Surf. Min. Reclam. Environ. 2005, 19, 75–84. [Google Scholar] [CrossRef]
- Ruff, T.M.; Hession-Kunz, D. Application of radio-frequency identification systems to collision avoidance in metal/nonmetal mines. IEEE Trans. Ind. Appl. 2001, 37, 112–116. [Google Scholar] [CrossRef]
- Chae, S.; Yoshida, T. Application of RFID technology to prevention of collision accident with heavy equipment. Autom. Constr. 2010, 19, 368–374. [Google Scholar] [CrossRef]
- Teizer, J.; Allread, B.S.; Fullerton, C.E.; Hinze, J. Autonomous pro-active real-time construction worker and equipment operator proximity safety alert system. Autom. Constr. 2010, 19, 630–640. [Google Scholar] [CrossRef]
- Marks, E.D.; Teizer, J. Method for testing proximity detection and alert technology for safe construction equipment operation. Constr. Manag. Econ. 2013, 31, 636–646. [Google Scholar] [CrossRef]
- Jo, B.W.; Lee, Y.S.; Kim, J.H.; Kim, D.K.; Choi, P.H. Proximity warning and excavator control system for prevention of collision accidents. Sustainability 2017, 9, 1488. [Google Scholar] [CrossRef] [Green Version]
- Jung, J.; Choi, Y. Measuring Transport Time of Mine Equipment in and Underground Mine Using a Bluetooth Beacon System. Minerals 2017, 7, 1. [Google Scholar] [CrossRef] [Green Version]
- Baek, J.; Choi, Y.; Lee, C.; Suh, J.; Lee, S. BBUNS: Bluetooth Beacon-Based Underground Navigation System to Support Mine Haulage Operations. Minerals 2017, 7, 228. [Google Scholar] [CrossRef] [Green Version]
- Baek, J.; Choi, Y.; Lee, C.; Jung, J. Performance comparison of bluetooth beacon and reverse RFID systems as potential tools for measuring truck travel time in open-pit mines: A simulation experiment. Geosyst. Eng. 2018, 21, 43–52. [Google Scholar] [CrossRef]
- Park, J.; Marks, E.; Cho, Y.K.; Suryanto, W. Performance test of wireless technologies for personnel and equipment proximity sensing in work zones. J. Constr. Eng. Manag. 2016, 142, 1–9. [Google Scholar] [CrossRef]
- Park, J.; Kim, K.; Cho, Y.K. Framework of Automated Construction-Safety Monitoring Using Cloud-Enabled BIM and BLE Mobile Tracking Sensors. J. Constr. Eng. Manag. 2017, 143, 1–16. [Google Scholar] [CrossRef]
- Baek, J.; Choi, Y. Bluetooth-beacon-based underground proximity warning system for preventing collisions inside tunnels. Appl. Sci. 2018, 8, 2271. [Google Scholar] [CrossRef] [Green Version]
- Jobes, C.; Carr, J.; DuCarme, J. Evaluation of an advanced proximity detection system for continuous mining machines. Int. J. Appl. Eng. Res. 2012, 7, 649–671. [Google Scholar]
- Park, J.W.; Yang, X.; Cho, Y.K.; Seo, J. Improving dynamic proximity sensing and processing for smart work-zone safety. Autom. Constr. 2017, 84, 111–120. [Google Scholar] [CrossRef]
- Turkan, Y.; Radkowski, R.; Karabulut-Ilgu, A.; Behzadan, A.H.; Chen, A. Mobile augmented reality for teaching structural analysis. Adv. Eng. Inf. 2017, 34, 90–100. [Google Scholar] [CrossRef]
- Lee, L.H.; Hui, P. Interaction Methods for Smart Glasses: A Survey. IEEE Access 2018, 6, 28712–28732. [Google Scholar] [CrossRef]
- Caudell, T.P.; Mizell, D.W. Augmented reality: An application of heads-up display technology to manual manufacturing processes. In Proceedings of the Proceedings of the Twenty-fifth Hawaii International Conference on System Sciences, Kauai, HI, USA, 7–10 January 1992; IEEE Computer Society Press: Washington, DC, USA, 1992; pp. 659–669. [Google Scholar]
- The Future of Smart Glasses. Available online: http://synoptik-fonden.dk/wp-content/uploads/The-Future-of-Smart-Glass-2014.pdf (accessed on 21 January 2020).
- Moshtaghi, O.; Kelley, K.S.; Armstrong, W.B.; Ghavami, Y.; Gu, J.; Djalilian, H.R. Using google glass to solve communication and surgical education challenges in the operating room. Laryngoscope 2015, 125, 2295–2297. [Google Scholar] [CrossRef]
- Ruminski, J.; Bujnowski, A.; Kocejko, T.; Andrushevich, A.; Biallas, M.; Kistler, R. The data exchange between smart glasses and healthcare information systems using the HL7 FHIR standard. In Proceedings of the 2016 9th International Conference on Human System Interactions (HSI 2016), Portland Building, University of Portsmouth, Portsmouth, UK, 6–8 July 2016; IEEE: New York, NY, USA, 2016; pp. 525–531. [Google Scholar]
- Ruminski, J.; Czuszynski, K. Application of smart glasses for fast and automatic color correction in health care. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society(EMBS), Jeju island, Korea, 11–15 July 2017; IEEE: New York, NY, USA, 2017; pp. 4950–4953. [Google Scholar]
- Kopetz, J.P.; Wessel, D.; Jochems, N. User-Centered Development of Smart Glasses Support for Skills Training in Nursing Education. I-Com 2019, 18, 287–299. [Google Scholar] [CrossRef]
- Xue, H.; Sharma, P.; Wild, F. User satisfaction in augmented reality-based training using microsoft HoloLens. Computers 2019, 8, 9. [Google Scholar] [CrossRef] [Green Version]
- Hobert, S.; Schumann, M. Application Scenarios of Smart Glasses in the Industrial Sector. I-Com 2016, 15, 133–143. [Google Scholar] [CrossRef]
- Augmented Reality in Logistics. Available online: https://www.dhl.com/content/dam/downloads/g0/about_us/logistics_insights/csi_augmented_reality_report_290414.pdf (accessed on 21 January 2020).
- Cheng, H.; Chiang, C. The Discussion of Interactive Outdoor Guidance and Appliance on Smart Glasses from the Aspect of Human Computer Interaction: Taking Dihua Street for Example. In Proceedings of the 18th International Conference, HCI International 2016, Toronto, ON, Canada, 17–22 July 2016; Kurosu, M., Ed.; Springer International Publishing Switzerland: Basel, Switzerland, 2016; pp. 237–247. [Google Scholar]
- Mason, M. The MIT Museum Glassware Prototype: Visitor Experience Exploration for Designing Smart Glasses. J. Comput. Cult. Herit. 2016, 9, 1–28. [Google Scholar] [CrossRef]
- Syberfeldt, A.; Danielsson, O.; Gustavsson, P. Augmented Reality Smart Glasses in the Smart Factory: Product Evaluation Guidelines and Review of Available Products. IEEE Access 2017, 5, 9118–9130. [Google Scholar] [CrossRef]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of Empirical and Theoretical Research. Adv. Psychol. 1988, 52, 139–183. [Google Scholar] [CrossRef]
- Bluetooth®. Available online: https://www.bluetooth.com/learn-about-bluetooth/bluetooth-technology/topology-options/ (accessed on 21 January 2020).
- Baek, J.; Suh, J.; Choi, Y. Analysis of Received Signal Strength Index from Bluetooth Beacons to Develop Proximity Warning Systems for Underground Mines. J. Korean Soc. Miner. Energy Resour. Eng. 2018, 55, 604–613. [Google Scholar] [CrossRef]
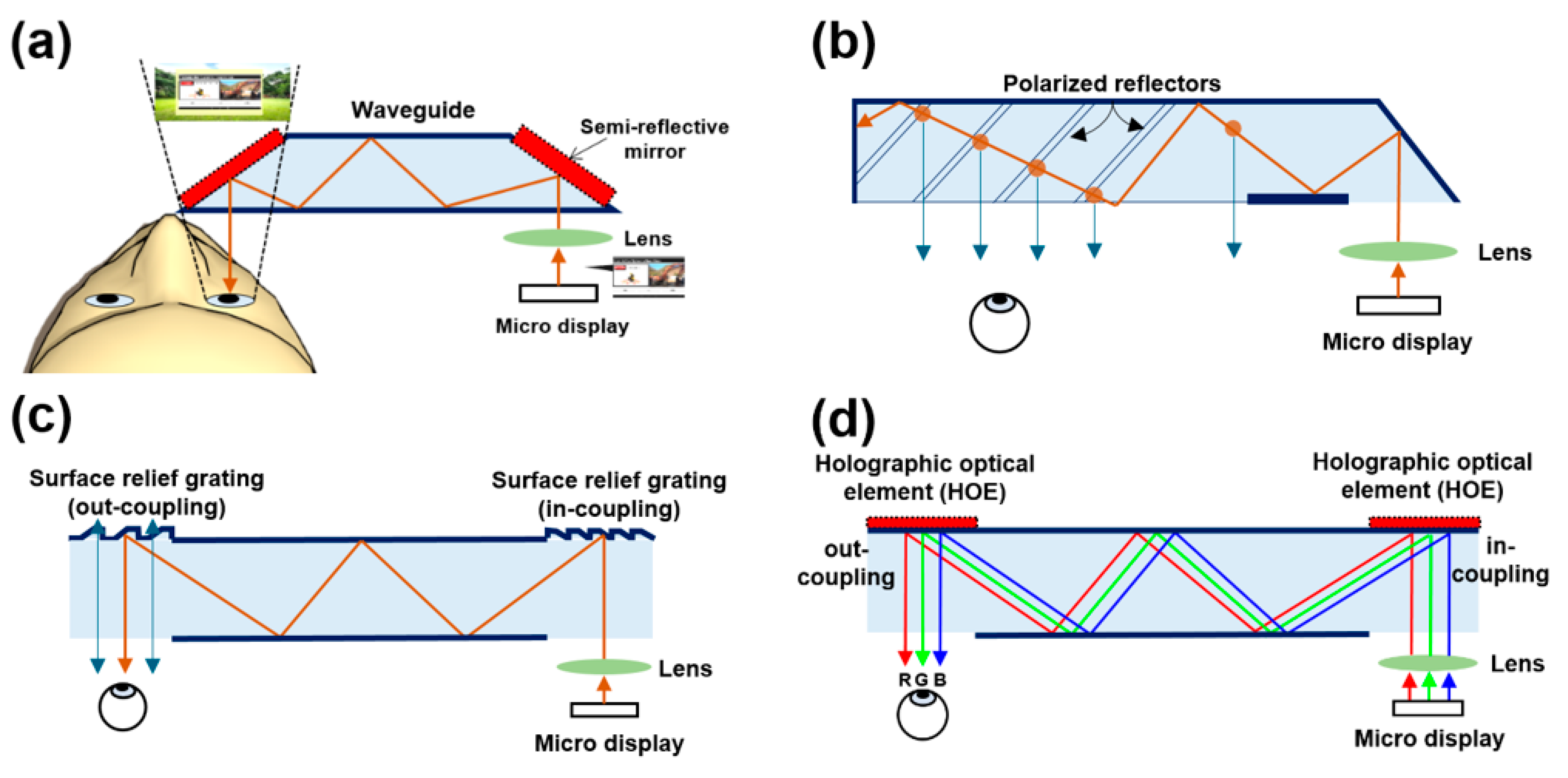
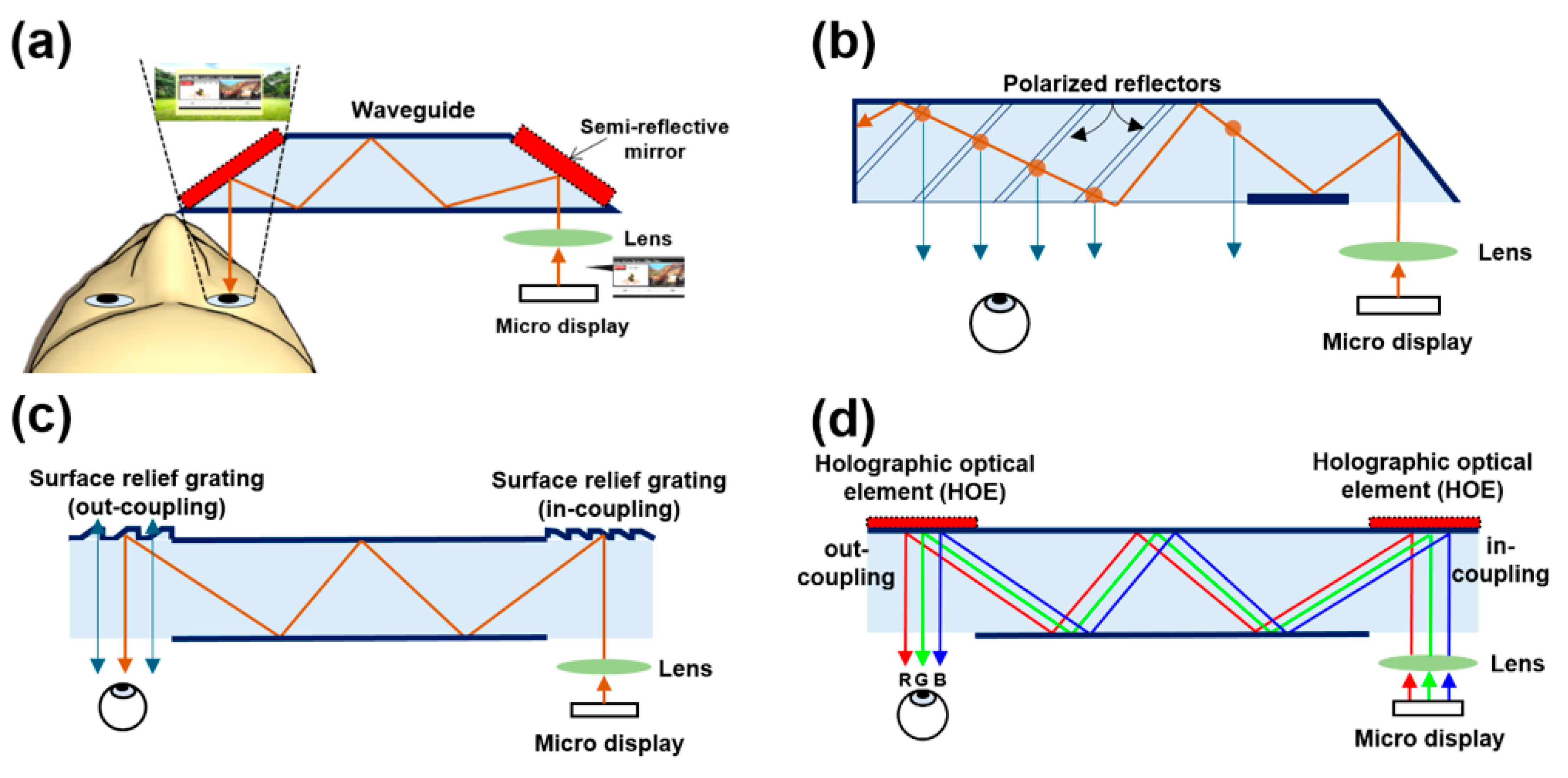
- Erdenebat, M.-U.; Lim, Y.-T.; Kwon, K.-C.; Darkhanbaatar, N.; Kim, N. Waveguide-Type Head-Mounted Display System for AR Application. In State of the Art Virtual Reality and Augmented Reality Knowhow; Mohamudally, N., Ed.; IntechOpen: London, UK, 2018; pp. 41–58. [Google Scholar]
- Epson. Available online: https://tech.moverio.epson.com/en/bt-350/ (accessed on 21 January 2020).
- MIT App Inventor. Available online: https://appinventor.mit.edu/ (accessed on 21 January 2020).
- Cain, B. A Review of the Mental Workload Literature; Defence research and development Toronto (Canada): Toronto, ON, Canada, 2007; pp. 1–35.
- Richer, G.; Gruber, H.; Friesenbichler, H.; Uscilowsk, A.; Jancurova, L.; Konova, D. Mental Workload: Identification and Evaluation of Hazards; Taking Measures. In Guide for Risk Assessment in Small and Medium Enterprises; The International Social Security Association (ISSA): Genova, Switzerland, 2008; pp. 1–25. [Google Scholar]
- Rubio, S.; Díaz, E.; Martín, J.; Puente, J.M. Evaluation of Subjective Mental Workload: A Comparison of SWAT, NASA-TLX, and Workload Profile Methods. Appl. Psychol. Int. Rev. 2004, 53, 61–86. [Google Scholar] [CrossRef]
- Reid, G.B.; Nygren, T.E. The subjective workload assessment technique: A scaling procedure for measuring mental workload. Adv. Psychol. 1988, 52, 185–218. [Google Scholar] [CrossRef]
- Tsang, P.S.; Velazquez, V.L. Diagnosticity and multidimensional subjective workload ratings. Ergonomics 1996, 39, 358–381. [Google Scholar] [CrossRef]
- NASA Task Load Index (TLX) v.1.0 Paper and Pencil Package. Available online: https://humansystems.arc.nasa.gov/groups/tlx/downloads/TLX_pappen_manual.pdf (accessed on 21 January 2020).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Products | |
|---|---|---|
| Google Glass Enterprise Edition 2 (Google, Menlo Park, CA, USA) | Microsoft HoloLens 2 (Microsoft Corporation, Redmond, WA, USA) | |
| Processors | Qualcomm Quad Core (Qualcomm, San Diego, CA, USA) | Qualcomm Snapdragon 850 (Qualcomm, San Diego, CA, USA) |
| Operating system | Android 8.0 Oreo (Google, Menlo Park, CA, USA) | Window 10 (Microsoft Corporation, Redmond, WA, USA) |
| RAM | 3 GB | 2 GB |
| Field of view | Diagonal 80° | Diagonal 52° |
| Model | RECO Beacon | |
|---|---|---|
| Dimensions (Diameter × Height) | 45 mm × 20 mm | |
| Weight | 11.6 g (0.4 oz) | |
| Processor | 32-bit ARM® Cortex®-M0 (ARM Holdings, Cambridge, UK) | |
| Chipset | Nordic nrf51822 (Nordic Semiconductor, Oslo, Norway) | |
| Casing | Acrylonitrile Butadiene Styrene (ABS) Plastic | |
| Battery | CR2450 Lithium Coin Battery (Panasonic, Osaka, Japan) | |
| Operating Temperature | −10 ~ 60 °C (14 ~ 140 °F) | |
| Signal transmission period | Min (100 ms), Max (2 s) | |
| Tx-power | Min (−16 dBm), Max (4 dBm) | |
| Signal range | 1 ~ 70 m (Directional), 1 ~ 30m (Omni-directional) | |
| Certification | South Korea | Korea Certification (KC) |
| USA | Federal Communication Commission (FCC) | |
| Europe | Conformité Européene (CE) marking | |
| Japan | Ministry of Internal Affairs and Communications (MIC) of Japan | |
| Model | Moverio BT-350 |
|---|---|
| Size (D × W × H) | 193.5 × 176 × 30 mm (Headset), 116 × 56 × 23 mm (Controller) |
| Weight | 119 g (Headset), 129 g (Controller) |
| Display device type | Si-OLED (Silicon-Organic Light-Emitting Diode) |
| Display size | 0.43 inch wide panel (16:9) |
| Pixel number | 921,600 pixels (1280 × 720) × RGB (3) |
| Field of view (FOV) | Approx. 23° |
| Processor | Intel® Atom™ x5 1.44GHz quad-core (Intel, Santa Clara, CA, UAS) |
| Operating System | Android 5.1 (Google, Menlo Park, CA, USA) |
| Internal memory | 2 GB RAM |
| Camera | 5 million pixels |
| Sensors | GPS/Gyroscopic/Accelerometer/Geomagnetic/Ambient light |
| Connectivity | Wi-Fi 802.11a/b/g/n/ac Bluetooth 4.1 (Bluetooth Smart Ready class 2) |
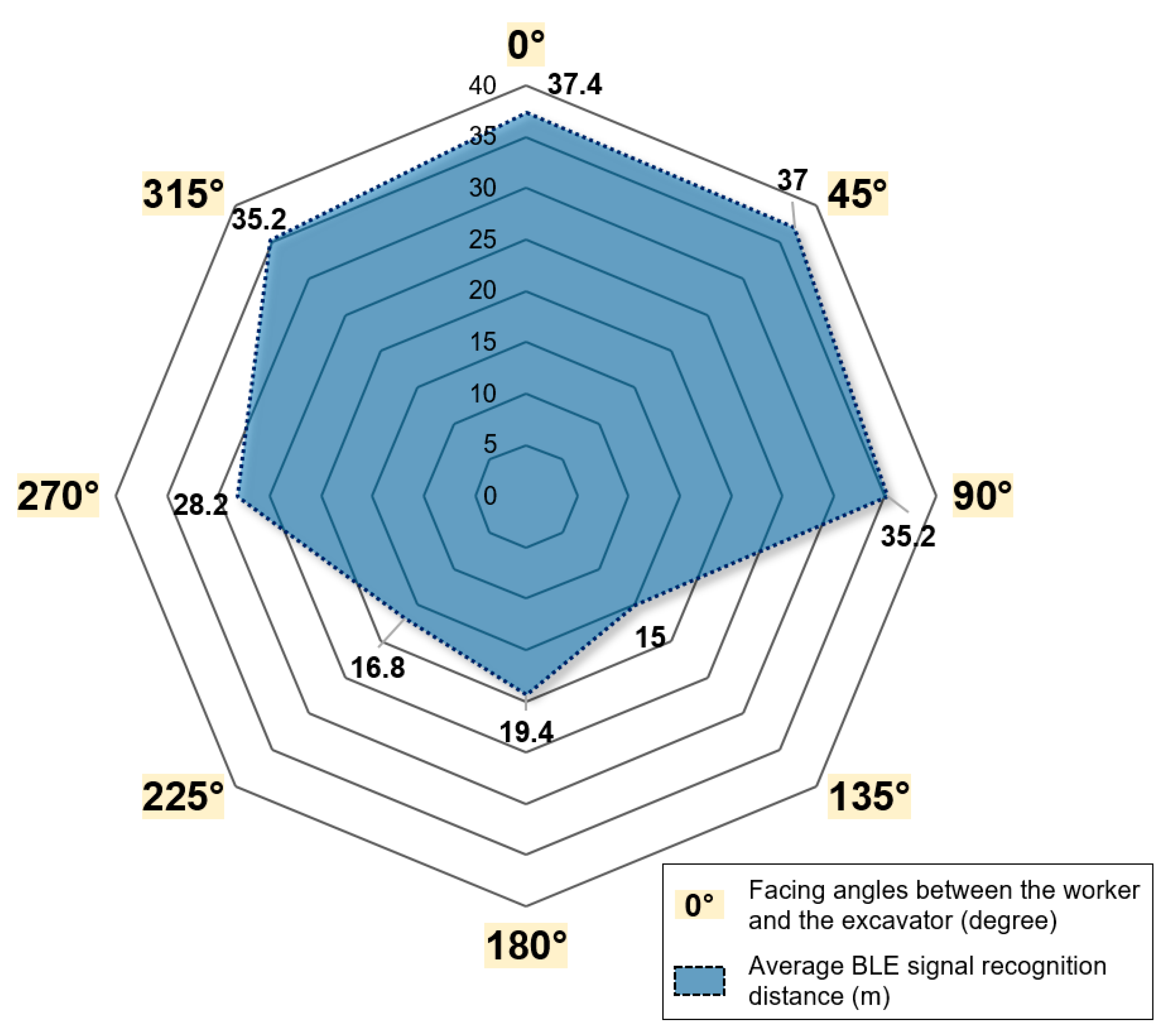
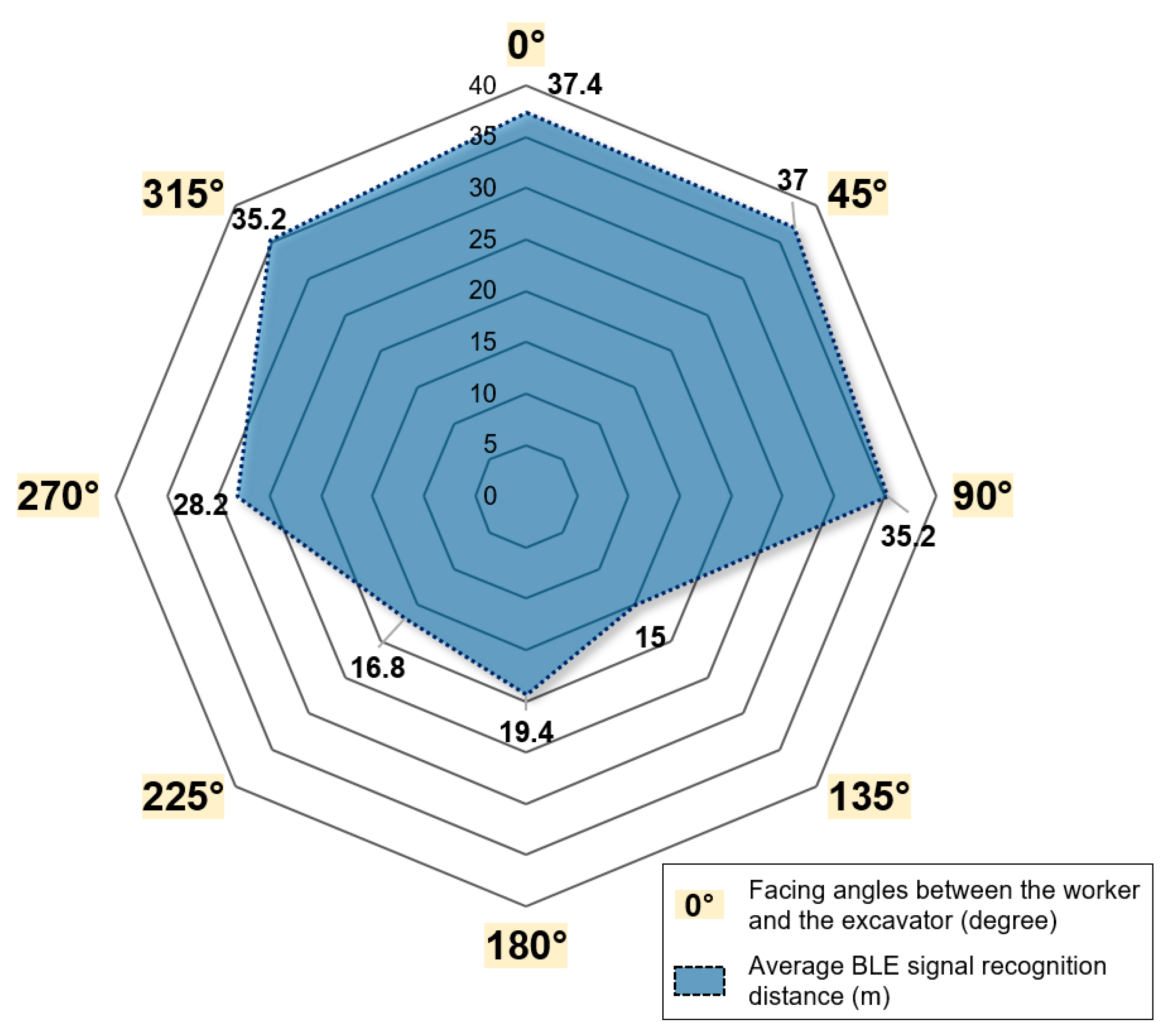
| BLE Signal Recognition Distance (m) | Facing Angle between the Pedestrian Worker and the Excavator | |||||||
|---|---|---|---|---|---|---|---|---|
| 0° | 45° | 90° | 135° | 180° | 225° | 270° | 315° | |
| Mean | 37.4 | 37 | 35.2 | 15 | 19.4 | 16.8 | 28.2 | 35.2 |
| STD 1 | 1.02 | 1.26 | 4.96 | 1.10 | 1.02 | 4.07 | 2.79 | 2.64 |
| Max 2 | 39 | 39 | 40 | 16 | 21 | 22 | 31 | 40 |
| Min 3 | 36 | 36 | 26 | 13 | 18 | 10 | 23 | 32 |
| Type of Warning Alert | Type of PWS | |
|---|---|---|
| Smartphone-Based PWS | Smart Glasses-Based Personal PWS | |
| Number of trials | 50 | 40 |
| Number of true positives | 50 | 40 |
| Number of false negatives | 0 | 0 |
| Recall (%) | 100 | 100 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baek, J.; Choi, Y. Smart Glasses-Based Personnel Proximity Warning System for Improving Pedestrian Safety in Construction and Mining Sites. Int. J. Environ. Res. Public Health 2020, 17, 1422. https://doi.org/10.3390/ijerph17041422
Baek J, Choi Y. Smart Glasses-Based Personnel Proximity Warning System for Improving Pedestrian Safety in Construction and Mining Sites. International Journal of Environmental Research and Public Health. 2020; 17(4):1422. https://doi.org/10.3390/ijerph17041422
Chicago/Turabian StyleBaek, Jieun, and Yosoon Choi. 2020. "Smart Glasses-Based Personnel Proximity Warning System for Improving Pedestrian Safety in Construction and Mining Sites" International Journal of Environmental Research and Public Health 17, no. 4: 1422. https://doi.org/10.3390/ijerph17041422