Use of Ultra Wide Band Real-Time Location System on Construction Jobsites: Feasibility Study and Deployment Alternatives


Abstract
:1. Introduction
1.1. Literature Review
1.1.1. Performance of UWB-Based RTLS
1.1.2. Domain Applications in Construction
1.2. Knowledge Gap
2. Materials and Methods
2.1. Deployment Protocols
2.1.1. Layout and Cabling
2.1.2. Orientation and Survey
2.1.3. Calibration
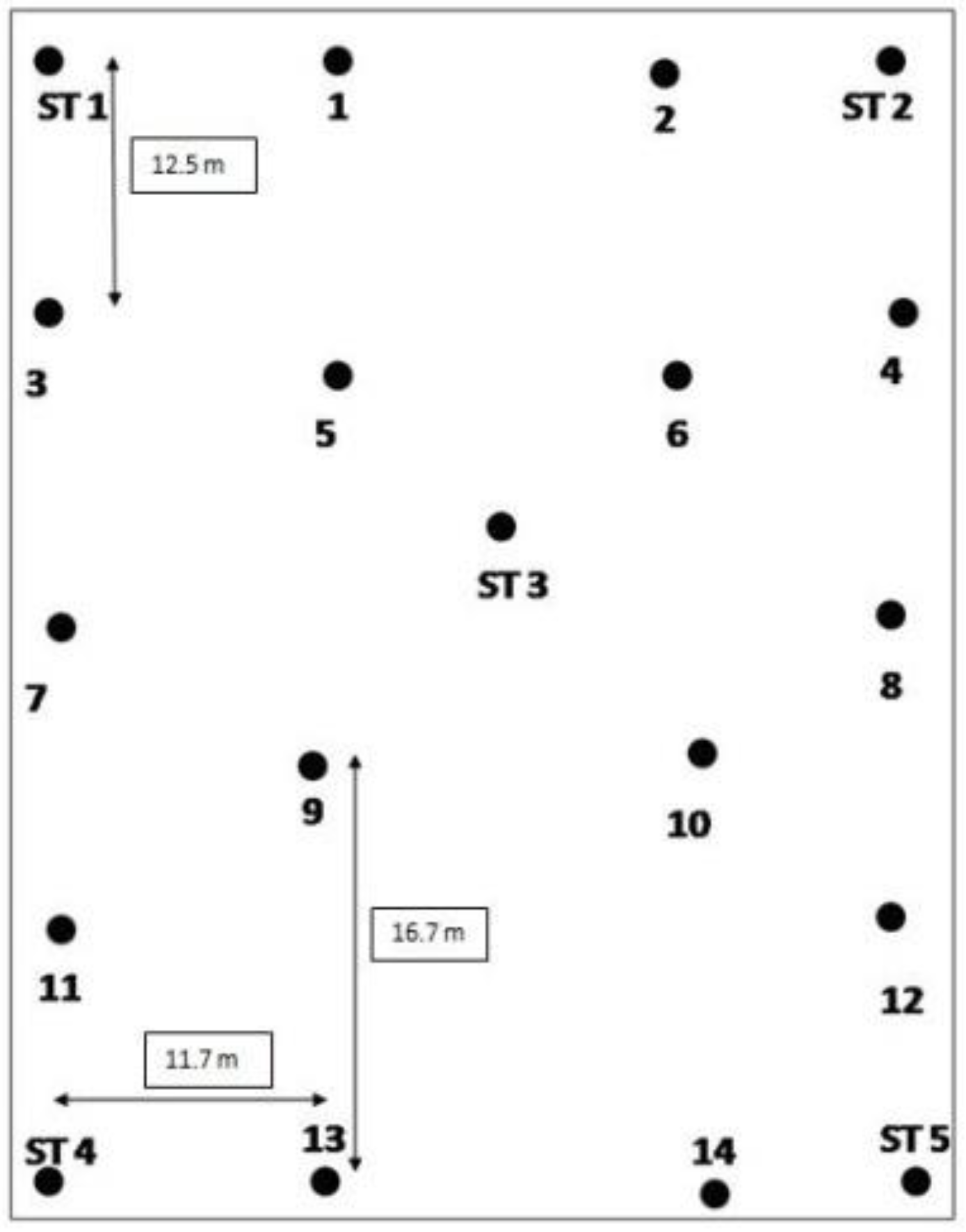
2.2. Experimental Protocols
2.3. Full Site Access
2.4. Offsite Setup
2.5. Partial Site Access
- A single tag deployed at different station points versus all tags deployed at once, as the number of tags being tracked has an impact on the accuracy;
- All tags deployed at once with AOA only versus with both AOA and TDOA, that is, wireless setup versus wired setup, respectively.
3. Results
3.1. Deployment Effort and Time Analysis
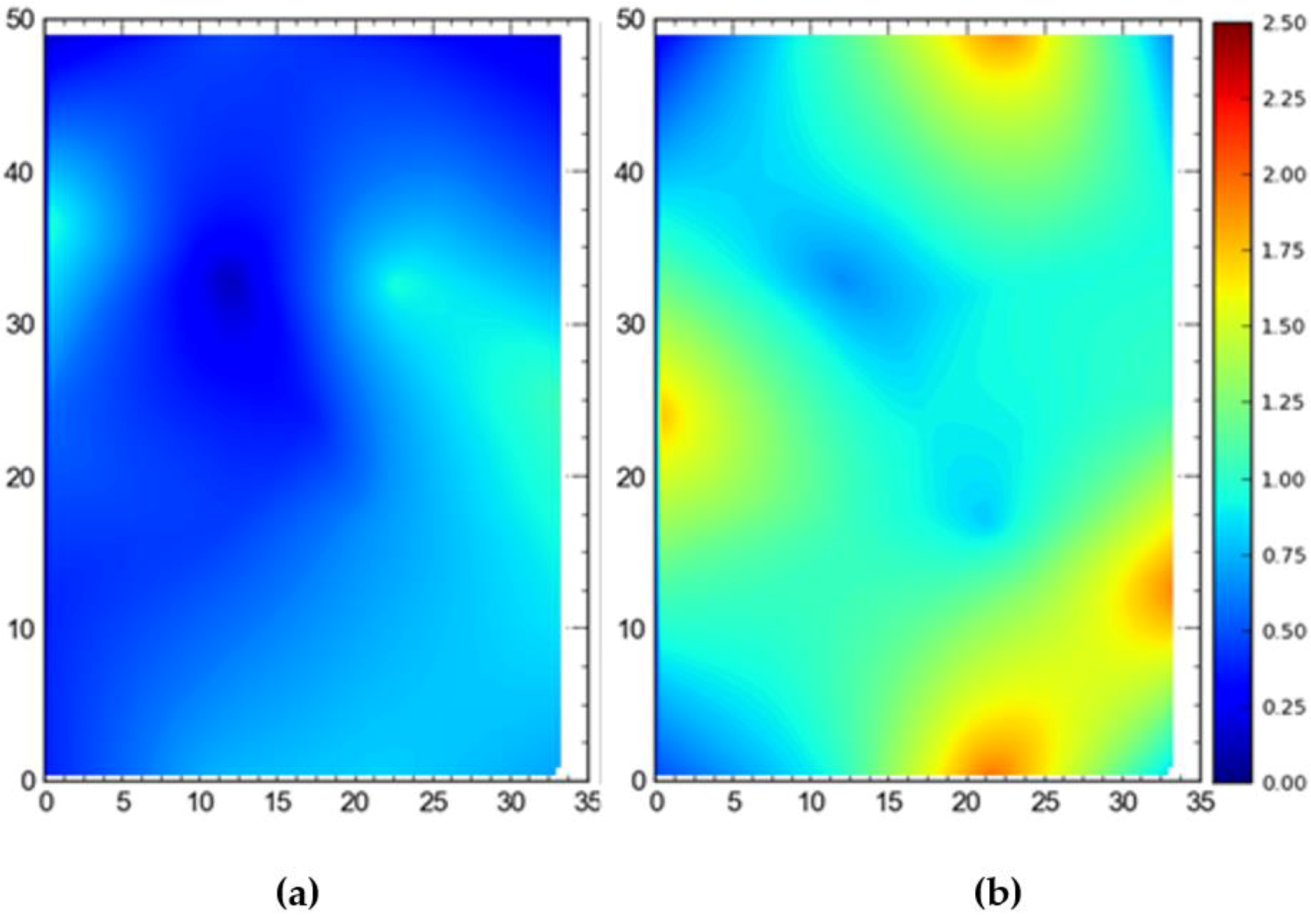
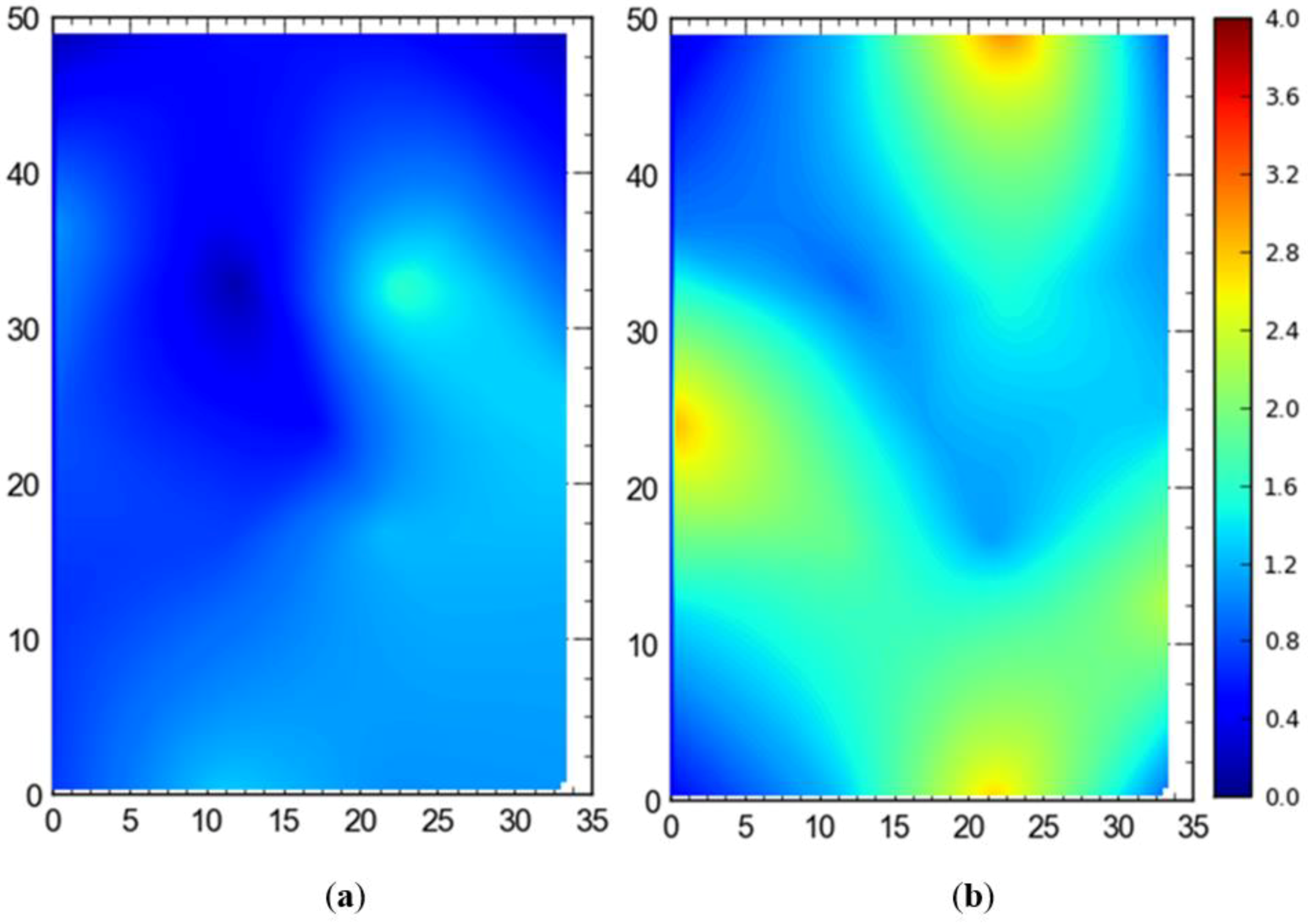
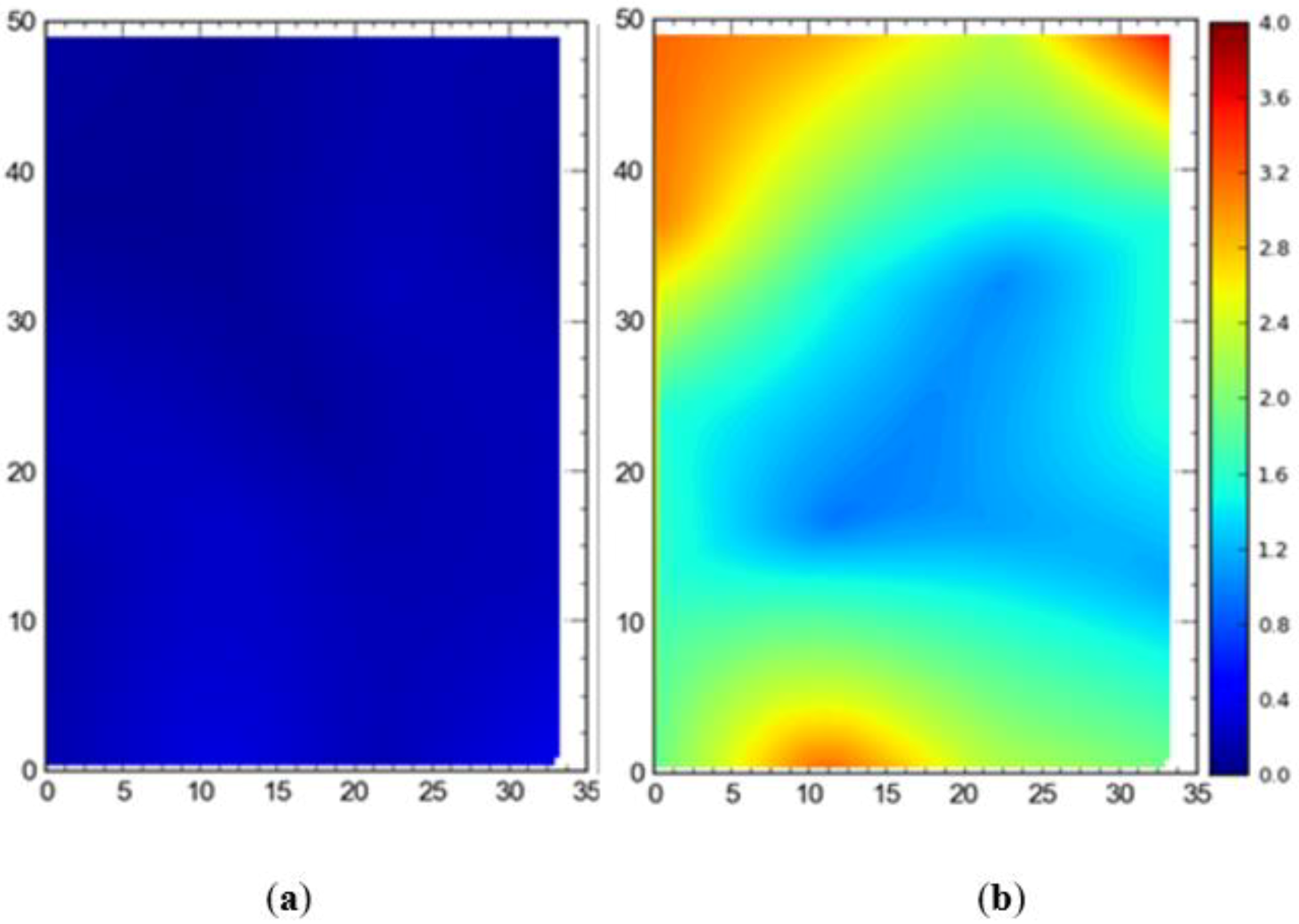
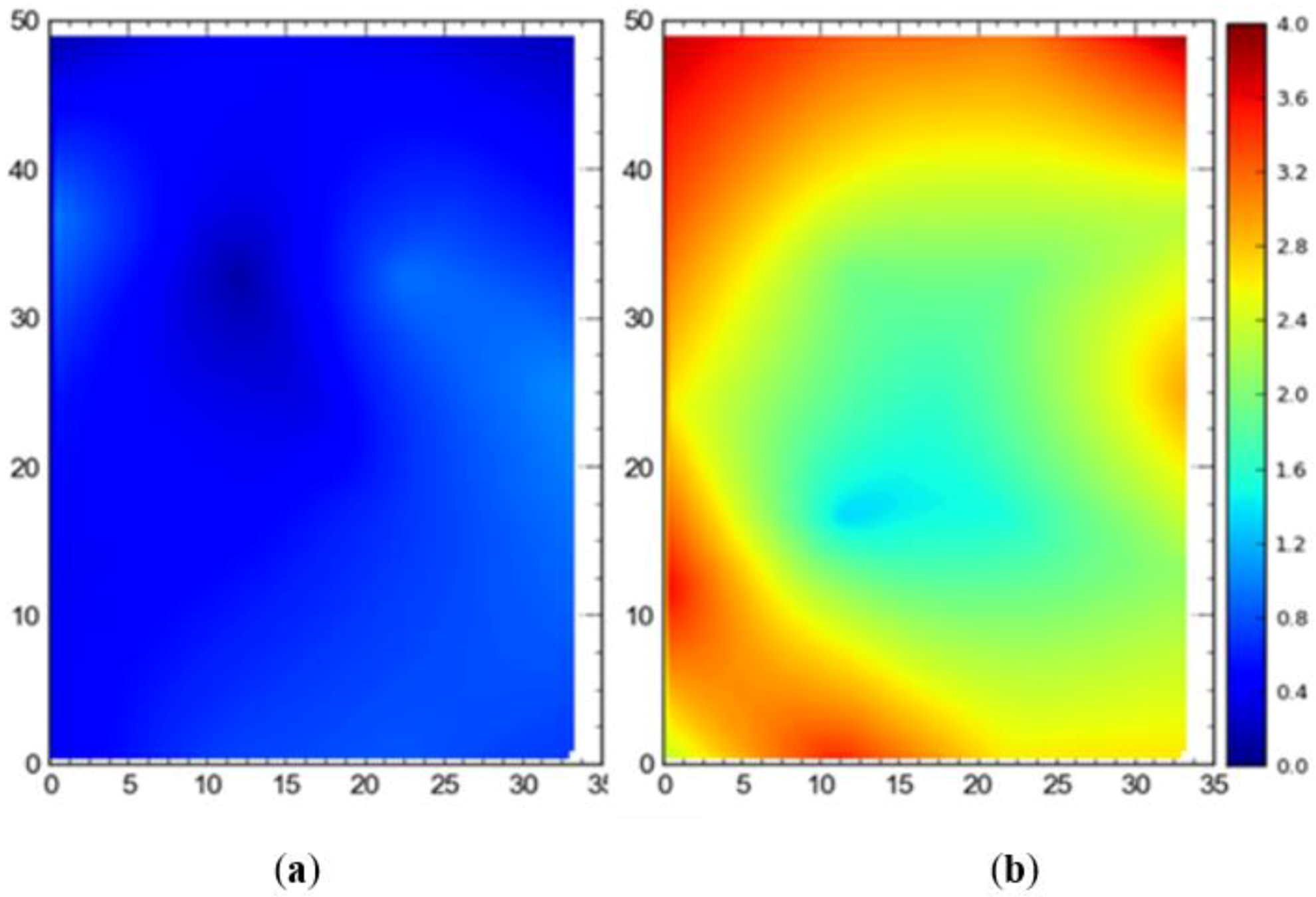
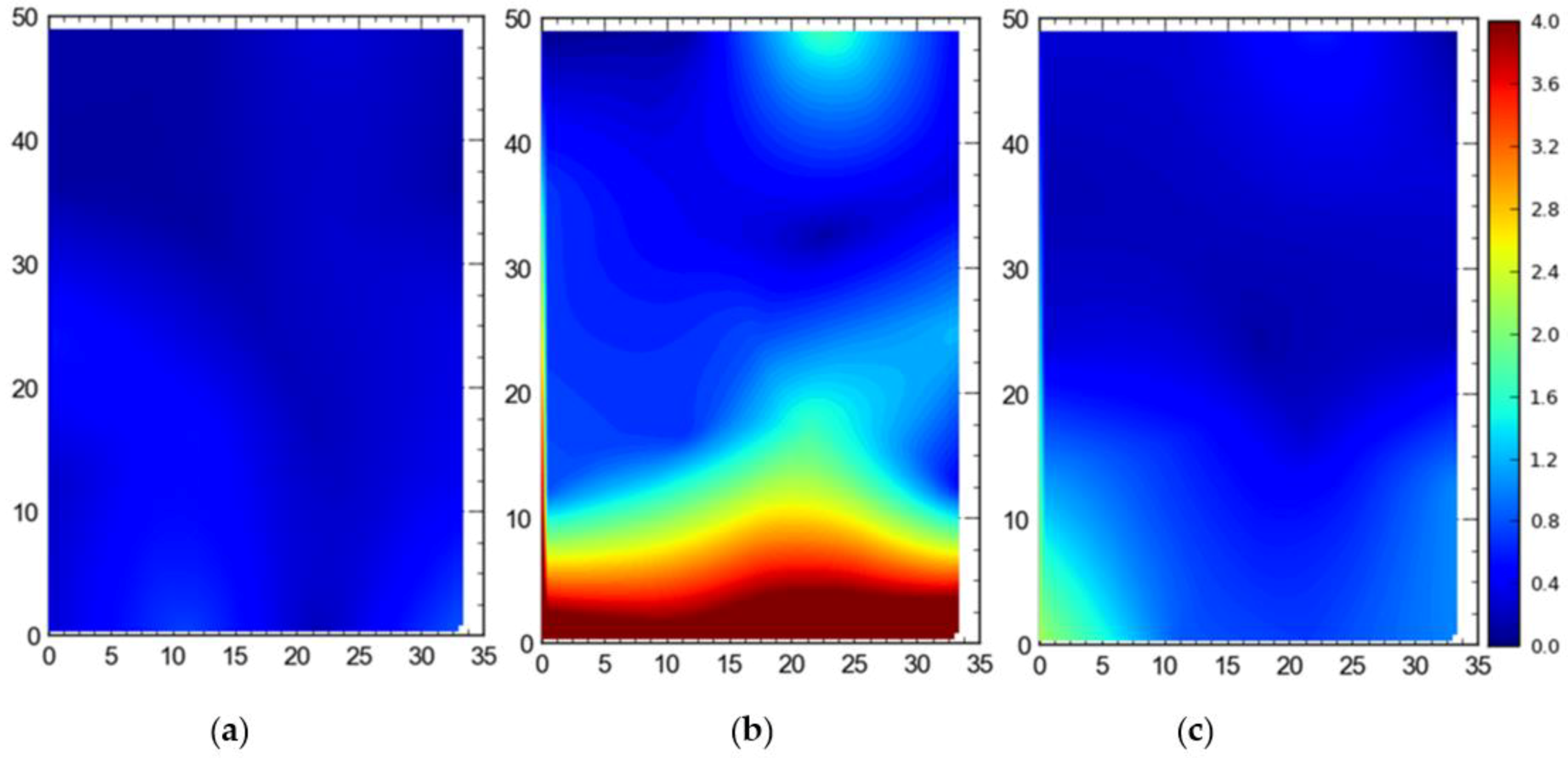
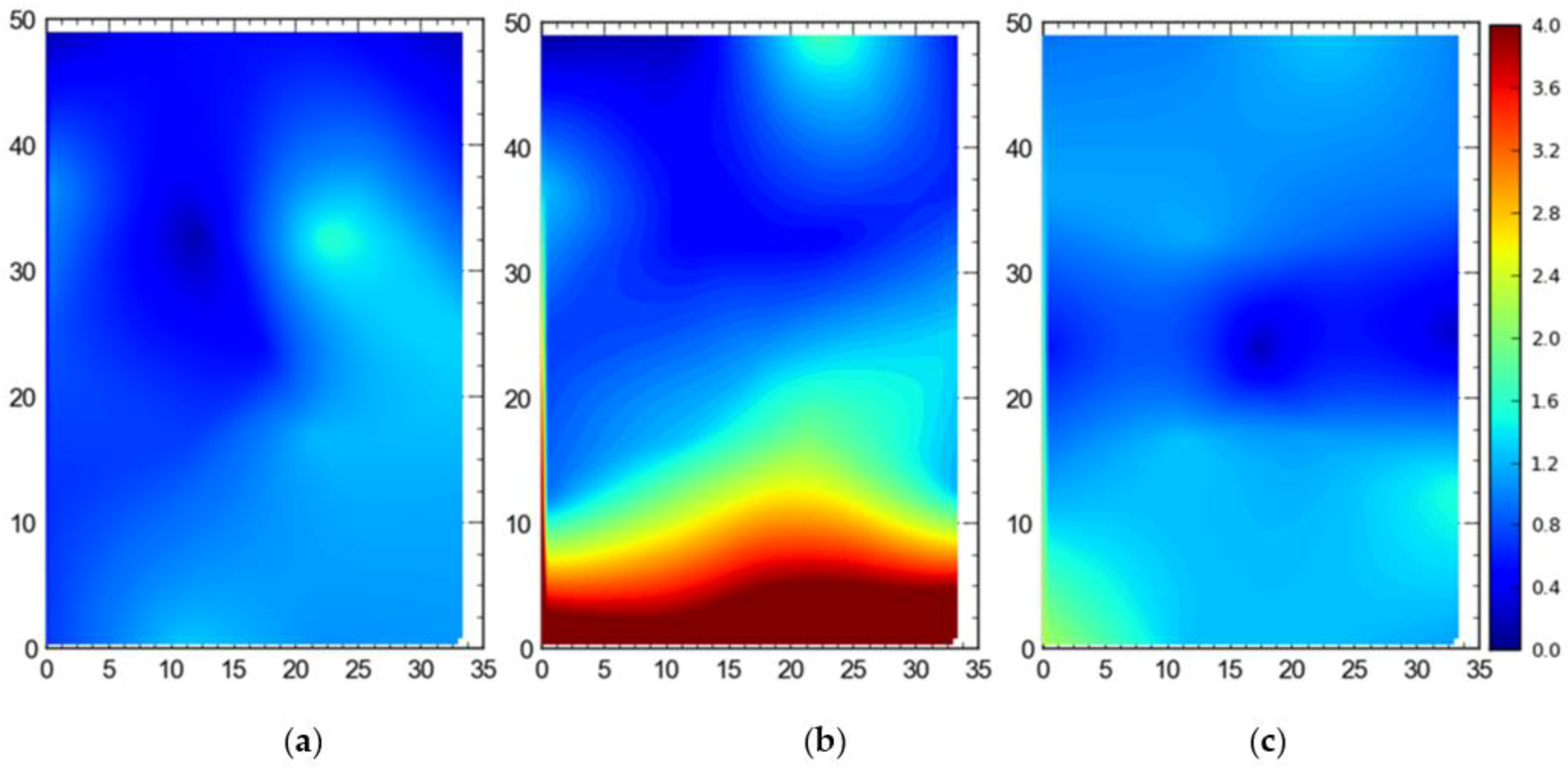
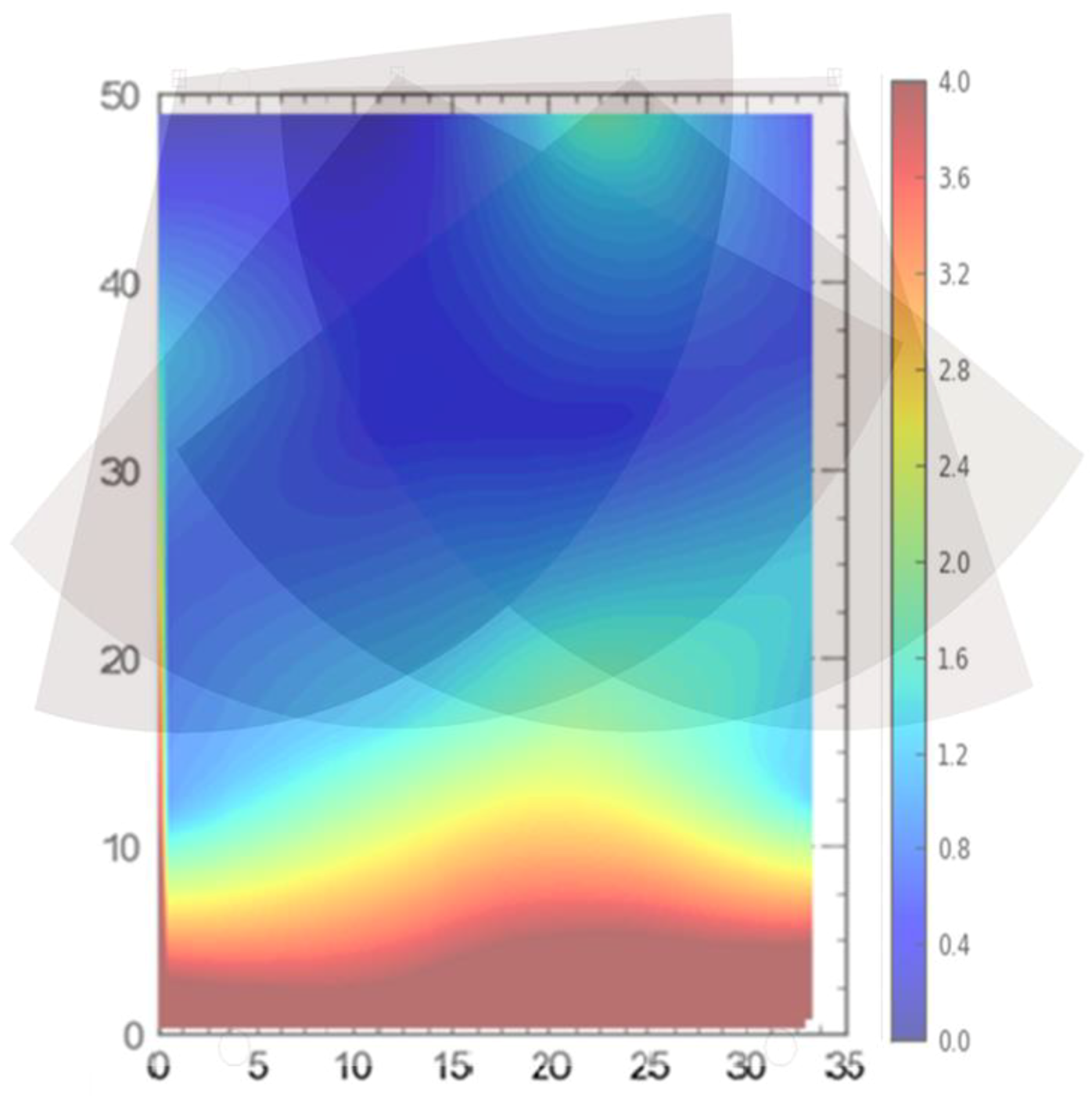
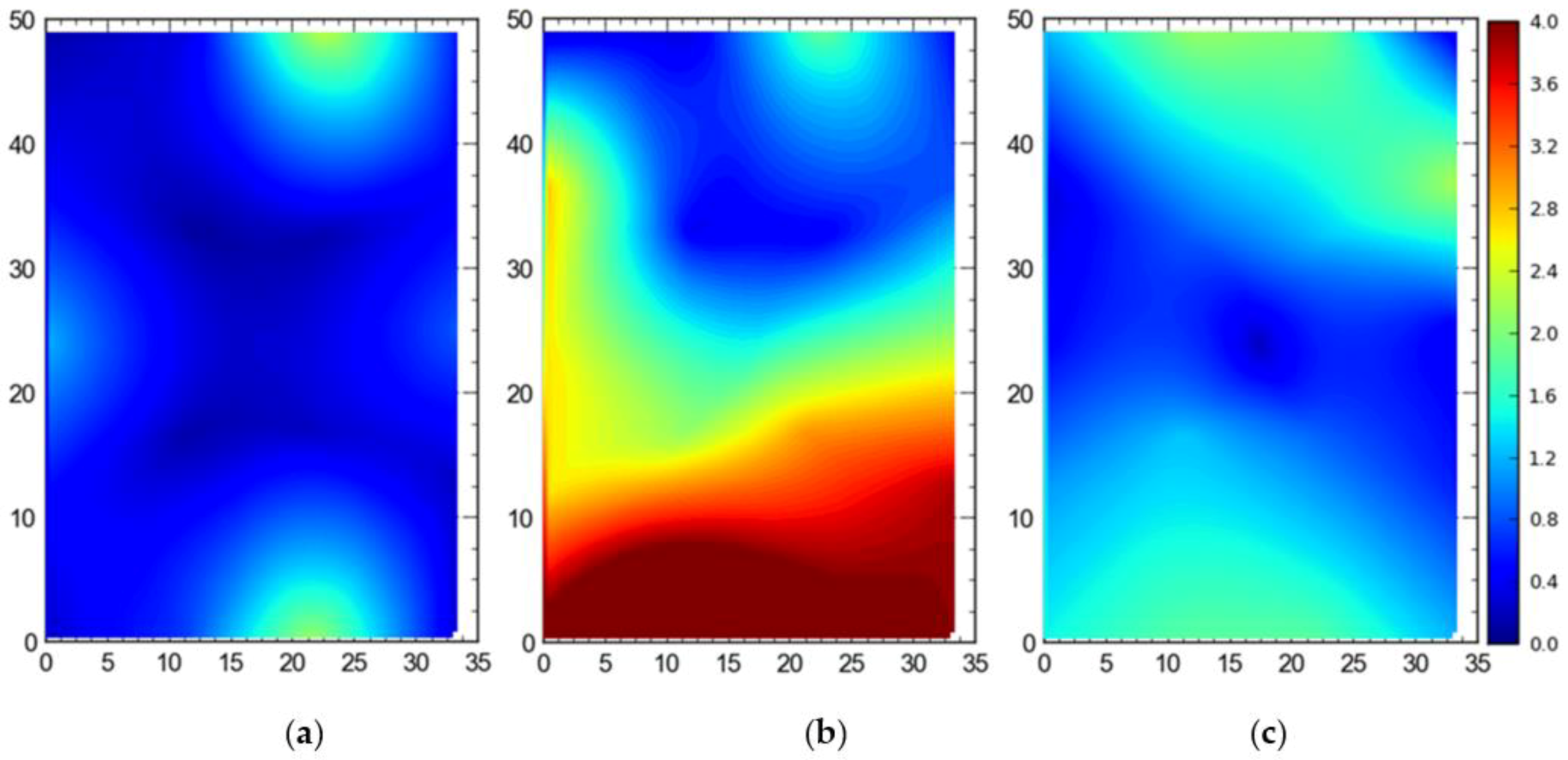
3.2. Static Experiments
Single Tag Versus All Tags Deployed at Once
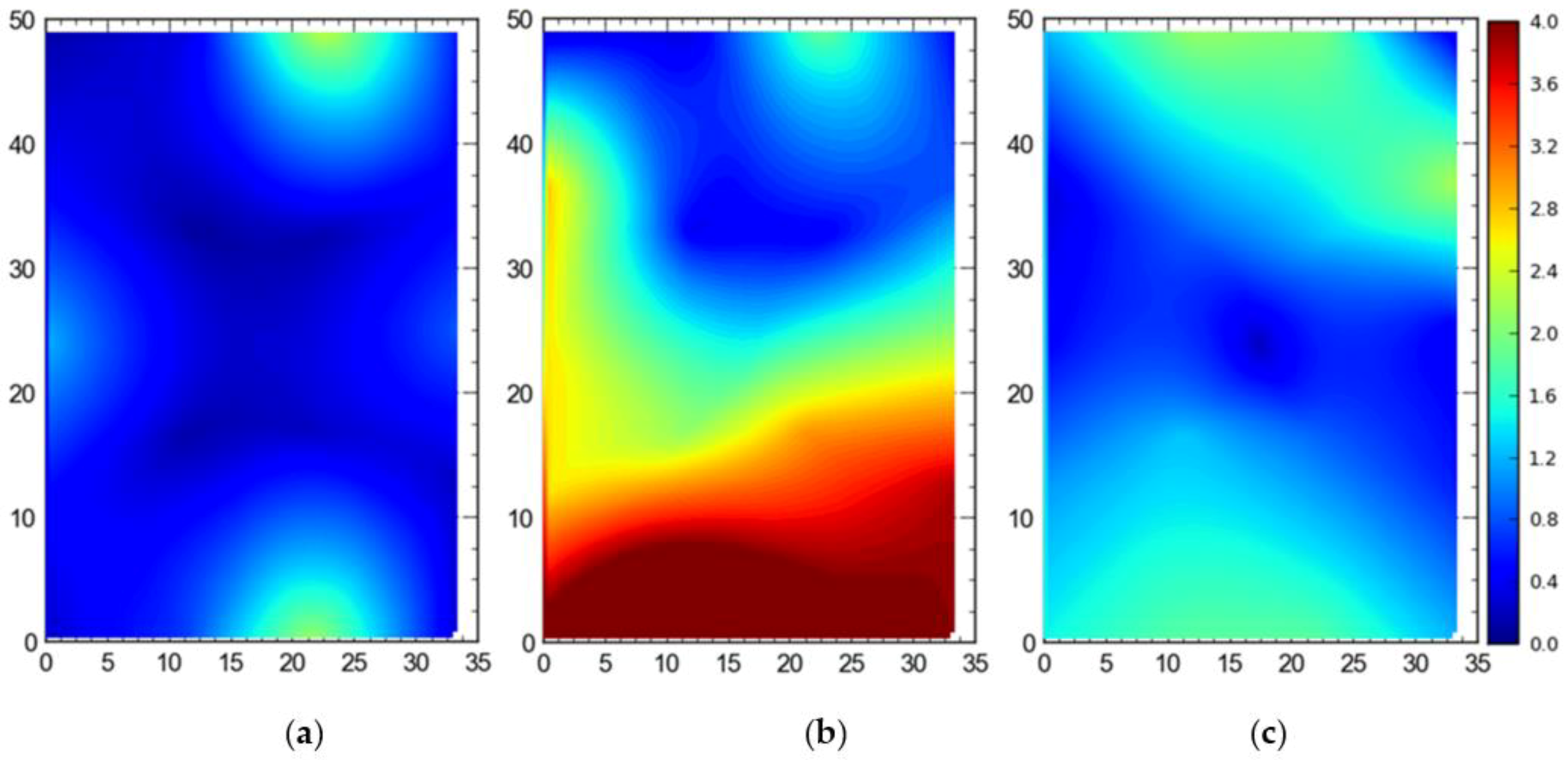
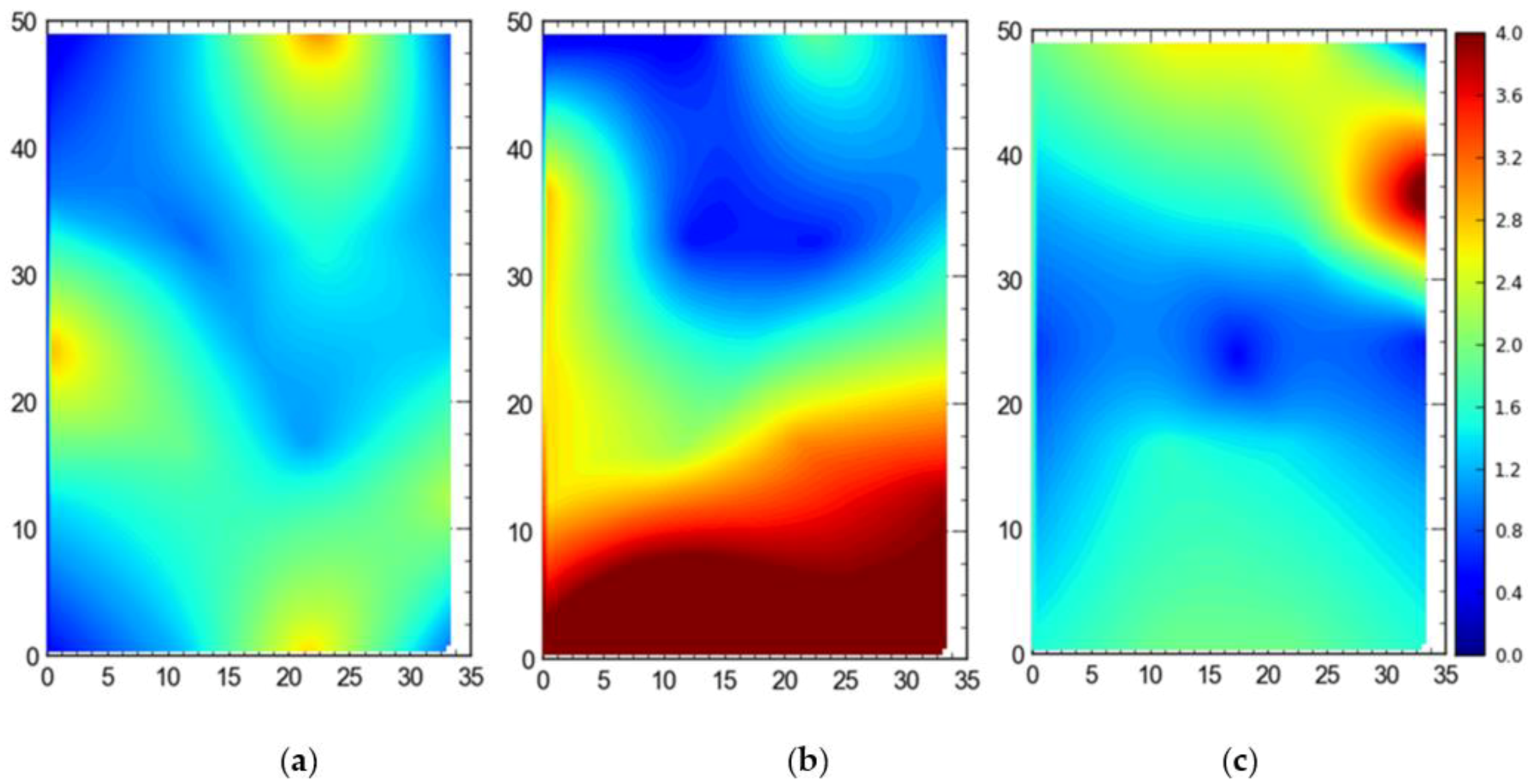
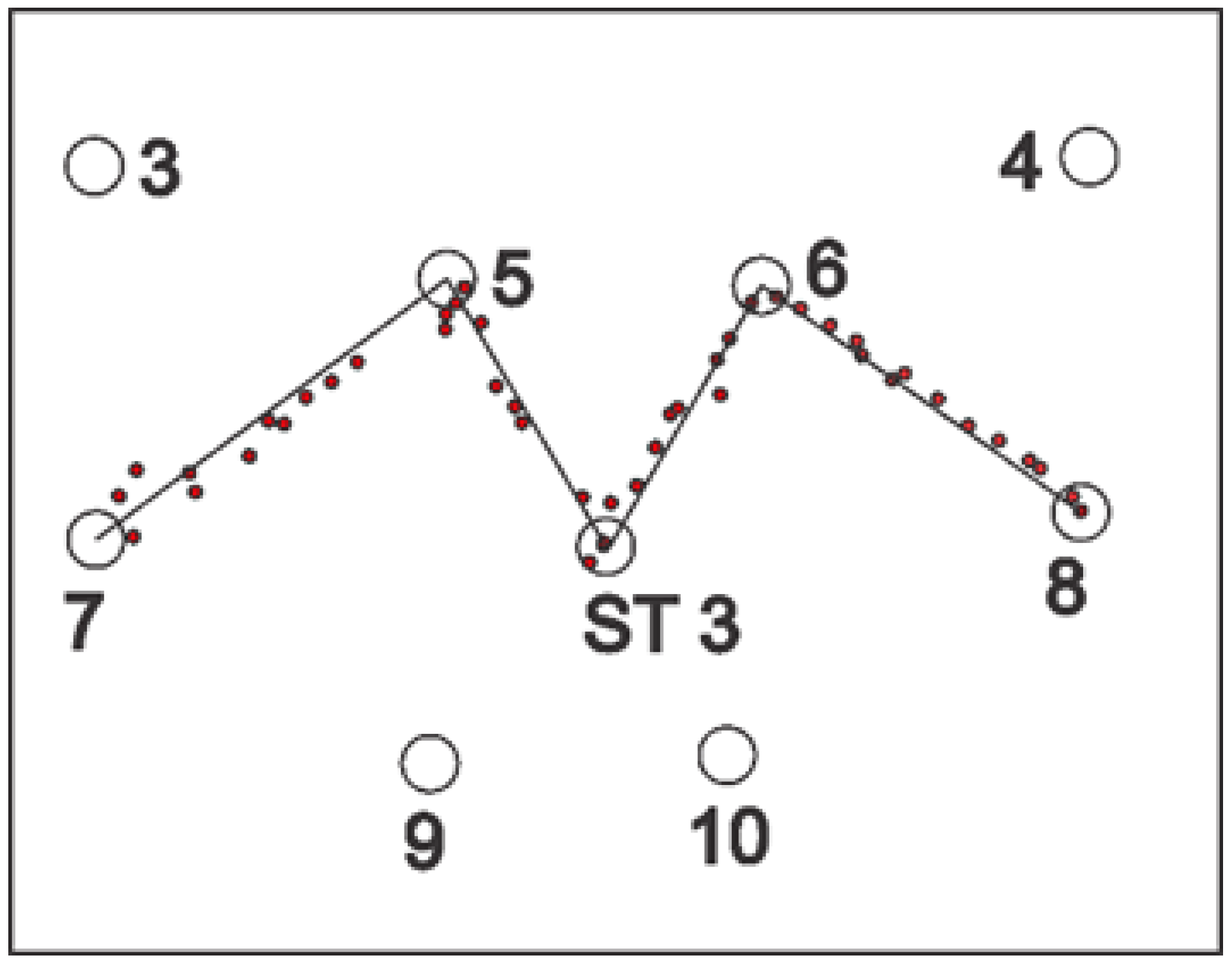
3.3. Dynamic Experiments
4. Discussion
4.1. Static Experiments
4.2. Dynamic Experiments
4.3. Practical Recommendations
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Becerik-Gerber, B.; Siddiqui, M.K.; Brilakis, I.; El-Anwar, O.; El-Gohary, N.; Mahfouz, T.; Kandil, A.A. Civil Engineering Grand Challenges: Opportunities for Data Sensing, Information Analysis, and Knowledge Discovery. J. Comput. Civ. Eng. 2014, 28, 1–13. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband indoor positioning technologies: Analysis and recent advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Khoury, H.M.; Kamat, V.R. Evaluation of position tracking technologies for user localization in indoor construction environments. Autom. Constr. 2009, 18, 444–457. [Google Scholar] [CrossRef]
- Zhang, C.; Hammad, A. Improving lifting motion planning and re-planning of cranes with consideration for safety and efficiency. Adv. Eng. Informatics 2012, 26, 396–410. [Google Scholar] [CrossRef]
- Maalek, R.; Sadeghpour, F. Accuracy assessment of Ultra-Wide Band technology in tracking static resources in indoor construction scenarios. Autom. Constr. 2013, 30, 170–183. [Google Scholar] [CrossRef]
- Kim, H.; Han, S. Accuracy improvement of real-time location tracking for construction workers. Sustainability 2018, 10, 1488. [Google Scholar] [CrossRef] [Green Version]
- Wu, W.; Yang, H.; Chew, D.A.S.; Yang, S.H.; Gibb, A.G.F.; Li, Q. Towards an autonomous real-time tracking system of near-miss accidents on construction sites. Autom. Constr. 2010, 19, 134–141. [Google Scholar] [CrossRef]
- Fullerton, C.E.; Allread, B.S.; Teizer, J. Pro-Active-Real-Time personnel warning system. In Proceedings of the Construction Research Congress 2009: Building a Sustainable Future, Seattle, WA, USA, 5–7 April 2009. [Google Scholar]
- Chae, S.; Yoshida, T. Application of RFID technology to prevention of collision accident with heavy equipment. Autom. Constr. 2010, 19, 368–374. [Google Scholar] [CrossRef]
- Mcdowall, J. Backhoes, Air Compressors, Skid-steeres, Generators head the Hit List. Rent. Manag. 2006. [Google Scholar]
- Hwang, S.; Trupp, T.; Liu, L. Needs and Trends of IT-based Construction Field Data Collection. Towards a Vision for Information Technology in Civil Engineering. In Proceedings of the Fourth Joint International Symposium on Information Technology in Civil Engineering, Nashville, TN, USA, 15–16 November 2004; no. 217. pp. 1–9. [Google Scholar]
- Hightower, J.; Borriello, G. Location Systems for Ubiquitous Computing. Computer 2001, 34, 57–66. [Google Scholar] [CrossRef] [Green Version]
- Ward, A. UWB Based In-building Location Systems. In Cambridge Wireless Joint Wireless Sensing and Short Range Wireless SIG “Sensing From Radio”; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Zhang, M.; Cao, T.; Zhao, X. Applying sensor-based technology to improve construction safety management. Sensors 2017, 17, 1841. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maalek, R. Accuracy Assessment of UWB for Locating Resources on Construction Sites. Master’s Thesis, University of Calgary, Calgary, AB, Canada, 2013. [Google Scholar]
- Saidi, K.S.; Teizer, J.; Franaszek, M.; Lytle, A.M. Static and dynamic performance evaluation of a commercially-available ultra wideband tracking system. Autom. Constr. 2011, 20, 519–530. [Google Scholar] [CrossRef]
- Cheng, T.; Venugopal, M.; Teizer, J.; Vela, P.A. Performance evaluation of ultra wideband technology for construction resource location tracking in harsh environments. Autom. Constr. 2011, 20, 1173–1184. [Google Scholar] [CrossRef]
- Cho, Y.K.; Hoon, J.; Martinez, D. Error modeling for an untethered ultra-wideband system for construction indoor asset tracking. Autom. Constr. 2010, 19, 43–54. [Google Scholar] [CrossRef]
- Shahi, A.; Aryan, A.; West, J.S.; Haas, C.T.; Haas, R.C.G. Deterioration of UWB positioning during construction. Autom. Constr. 2012, 24, 72–80. [Google Scholar] [CrossRef]
- Rodriguez, S.; Zhang, C.; Hammad, A. Feasibility of location tracking of construction resources using UWB for better productivity and safety. In Proceedings of the International Conference on Computing in Civil and Building Engineering, Nottinham, UK, 30 June–2 July 2010. [Google Scholar]
- Mok, E.; Xia, L.; Retscher, G.; Tian, H. A case study on the feasibility and performance of an UWB-AoA real time location system for resources management of civil construction projects. J. Appl. Geod. 2010, 4, 23–32. [Google Scholar] [CrossRef]
- Carbonari, A.; Giretti, A.; Naticchia, B. A proactive system for real-time safety management in construction sites. Autom. Constr. 2011, 20, 686–698. [Google Scholar] [CrossRef]
- Castro-Lacouture, D.; Irizarry, J.; Arboleda, C. UWB positioning System and method for safety improvement in Building Construction Sites. In Proceedings of the Construction Research Congress, Banff, AB, Canada, 8–10 May 2007. [Google Scholar]
- Teizer, J.; Castro-Lacouture, D. Combined Ultra-Wideband Positioning and Range Imaging Sensing for Productivity and Safety Monitoring in Building Construction. Comput. Civ. Eng. 2007, 681–688. [Google Scholar]
- Teizer, J.; Ph, D.; Mantripragada, U.; Student, M.S.; Venugopal, M.; Student, P.D. Analyzing the travel patterns of construction workers. In Proceedings of the 25th International Symposium on Automation and Robotics in Construction, Vilnius, Lithuania, 26–29 June 2008; pp. 391–396. [Google Scholar]
- Teizer, J.; Cheng, T.; Fang, Y. Location tracking and data visualization technology to advance construction ironworkers’ education and training in safety and productivity. Autom. Constr. 2013, 35, 53–68. [Google Scholar] [CrossRef]
- Cheng, T.; Migliaccio, G.C.; Ph, D.; Teizer, J.; Gatti, U.C. Data Fusion of Real-Time Location Sensing and Physiological Status Monitoring for Ergonomics Analysis of Construction Workers. J. Comput. Civ. Eng. 2013, 320–335. [Google Scholar] [CrossRef]
- Cheng, T.; Teizer, J. Real-time resource location data collection and visualization technology for construction safety and activity monitoring applications. Autom. Constr. 2013, 34, 3–15. [Google Scholar] [CrossRef]
- Teizer, J.; Lao, D.; Sofer, M. Rapid automated monitoring of construction site activities using ultra-wideband. In Proceedings of the 24th International Syposium on Automation & Robotics in Construction, Kochi, India, 19–21 September 2007. no. 2. [Google Scholar]
- Shahi, A.; West, J.S.; Haas, C.T. Onsite 3D marking for construction activity tracking. Autom. Constr. 2013, 30, 136–143. [Google Scholar] [CrossRef]
- Vahdatikhaki, F.; Hammad, A. Framework for near real-time simulation of earthmoving projects using location tracking technologies. Autom. Constr. 2014, 42, 50–67. [Google Scholar] [CrossRef]
- Krishnamoorthy, R. Development of An Ultra-Wide Band-based Real-Time Vibrator Tip Locating System for Intelligent Concrete Consolidation. Ph.D. Thesis, Rutgers University, New Brunswick, NJ, USA, 2014. [Google Scholar]
- Venugopal, M.; Cheng, T.; Teizer, J. Real-time Spatial Location Tracking of Construction Resources in Lay Down Yards. In Proceedings of the Construction Research Congress, Banff, AB, Canada, 8–10 May 2010; pp. 112–121. [Google Scholar]
- Hwang, S. Ultra-wide band technology experiments for real-time prevention of tower crane collisions. Autom. Constr. 2012, 22, 545–553. [Google Scholar] [CrossRef]
- Zhang, C.; Albahnassi, H.; Hammad, A.; Engineering, S. Improving construction safety through real-time motion planning of cranes. In Proceedings of the International Conference on Computing in Civil and Building Engineering, Nottinham, UK, 30 June–2 July 2010. [Google Scholar]
- Behzadan, A.H.; Kamat, V.R. Enabling discovery-based learning in construction using telepresent augmented reality. Autom. Constr. 2013, 33, 3–10. [Google Scholar] [CrossRef]
- Zebra Technologies. Zebra Expedites Orders with Its Own Real-Time Locating Technology. 2012. Available online: https://www.zebra.com/content/dam/zebra/success-stories/en-us/pdfs/zebra-warehouse-rtls-en-us.pdf (accessed on 26 March 2020).
- Zebra Technologies. Voestalpine Expedites Search and Rescue Time with Real-Time Location. 2012. Available online: http://www.zebra.com/content/dam/zebra/success-stories/en-us/pdfs/voestalpine-en-us.pdf (accessed on 26 March 2020).
- Ubisense. The Challenge Automation of Car Assembly. 2009. Available online: http://www.ubisense.net/en/media/pdfs/casestudies_pdf/uk/55177_casestudyautomotiveassemblylinevus010809en.pdf (accessed on 30 January 2020).
- Zebra Technologies. Real-Time Asset Tracking Drives Emergency Care Goals at Washington Hospital Center. 2012. Available online: https://www.zebra.com/content/dam/zebra/success-stories/en-us/pdfs/washington-hospital-en-us.pdf (accessed on 26 March 2020).
- Hossain, A.K.M.M.; Soh, W.-S. A survey of calibration-free indoor positioning systems. Comput. Commun. 2015, 66, 1–13. [Google Scholar] [CrossRef]
- Cadman, J. Deploying commercial location-aware systems. In Proceedings of the 2003 Workshop on Location-Aware Computing (held as part of UbiComp 2003), Seattle, WA, USA, 12 October 2003; pp. 4–6. [Google Scholar]
- Leick, A. GPS Satellite Surveying, 3rd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Aryan, A. Evaluation of Ultra-Wideband Sensing Technology for Position Location in Indoor Construction Environments. Master’s Thesis, University of Waterloo, Waterloo, ON, Canada, 2011. [Google Scholar]
- Low, B.K.L.; Man, S.S.; Chan, A.H.S.; Alabdulkarim, S. Construction worker risk-taking behavior model with individual and organizational factors. Int. J. Environ. Res. Public Health 2019, 16, 1335. [Google Scholar] [CrossRef] [Green Version]
- Man, S.S.; Chan, A.H.S.; Wong, H.M. Risk-taking behaviors of Hong Kong construction workers—A thematic study. Saf. Sci. 2017, 98, 25–36. [Google Scholar] [CrossRef]
- Umer, W.; Li, H.; Yu, Y.; Antwi-Afari, M.F.; Anwer, S.; Luo, X. Physical exertion modeling for construction tasks using combined cardiorespiratory and thermoregulatory measures. Autom. Constr. 2020, 112, 103079. [Google Scholar] [CrossRef]
- Umer, W.; Li, H.; Szeto, G.P.; Wong, A.Y. Proactive safety measures: Quantifying the upright standing stability after sustained rebar tying postures. J. Constr. Eng. Manag. 2018, 144. [Google Scholar] [CrossRef]
- Umer, W.; Li, H.; Szeto, G.P.Y.; Wong, A.Y.L. Low-Cost Ergonomic Intervention for Mitigating Physical and Subjective Discomfort during Manual Rebar Tying. J. Constr. Eng. Manag. 2017, 143. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Component | Experiment Number | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| 1. Bipods placement | 15 | 10 | 10 | 10 | 10 |
| 2. Sensors stands placement | 15 | 15 | 10 | 15 | 15 |
| 3. Layout and cabling | 100 | 100 | 40 | 60 | 50 |
| 4. Orientation and survey | 80 | 60 | 80 | 80 | 60 |
| 5. System calibration | 90 | 40 | 60 | 20 | 40 |
| Cumulative time (man-minutes) | 300 | 225 | 200 | 185 | 175 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Umer, W.; Siddiqui, M.K. Use of Ultra Wide Band Real-Time Location System on Construction Jobsites: Feasibility Study and Deployment Alternatives. Int. J. Environ. Res. Public Health 2020, 17, 2219. https://doi.org/10.3390/ijerph17072219
Umer W, Siddiqui MK. Use of Ultra Wide Band Real-Time Location System on Construction Jobsites: Feasibility Study and Deployment Alternatives. International Journal of Environmental Research and Public Health. 2020; 17(7):2219. https://doi.org/10.3390/ijerph17072219
Chicago/Turabian StyleUmer, Waleed, and Mohsin K. Siddiqui. 2020. "Use of Ultra Wide Band Real-Time Location System on Construction Jobsites: Feasibility Study and Deployment Alternatives" International Journal of Environmental Research and Public Health 17, no. 7: 2219. https://doi.org/10.3390/ijerph17072219