1. Introduction
Microgrids have been widely considered as a building block of future smart grid [
1], so there have been many real islanded microgrid systems developed for rural and distant areas [
2,
3,
4,
5]. However, how to control the voltage and frequency of a microgrid in an islanded model has been one of the major challenges for researchers recently [
6], because it is often more difficult than—in grid-connected mode. More specifically, when the microgrids operate in the grid-connected mode, the control of voltage and frequency depends on the regulation of the main utility grid. While the microgrids are in the islanded mode, the distributed components should regulate the stochastic and determinate fluctuation caused by some distributed generations, e.g., wind turbine generator and solar photovoltaics, and demand-side loads.
In recent years, some frequency control methods for microgrids or hybrid power systems have been proposed by using traditional proportional-integral-derivative (PID) controllers or robust controllers [
7,
8,
9,
10,
11,
12,
13,
14,
15,
16]. For example, a hybrid method by combining particle swarm optimization (PSO) and fuzzy logic [
11] is proposed to design proportional-integral (PI)-based frequency controllers for an alternating current microgrid. Another genetic algorithm (GA)-based frequency PID controller has been developed for a solar thermal diesel wind hybrid energy generation and storage system [
13]. Singh et al. [
14] present a robust PSO-based
H∞ method for the frequency control of a hybrid power system. Similar research works include robust
H∞ and structured singular value
μ-based control synthesis approaches for microgrids [
15]. Bendato et al. [
16] proposed an effective two-step procedure to optimize a real-time energy management system by integrating economic aspects and power quality objectives including reactive power, voltage and frequency. Its effectiveness has been demonstrated on a microgrid system called “University of Genoa Smart Polygeneration Microgrid”.
Fractional order controllers have attracted increasing attentions recently due to their better control performance compared to traditional integer-order controllers [
17,
18,
19,
20,
21,
22,
23,
24]. Consequently, there are some recently reported frequency control methods based on fractional order proportional-integral-derivative (FOPID) controllers for islanded microgrids by using some intelligent optimization algorithms, e.g., Kriging-based surrogate modeling, called the KSM method [
25], chaotic PSO based fractional order fuzzy PID controller [
26]. In addition, Pan and Das [
27] utilized a chaotic nondominated sorting genetic algorithm-II (NSGA-II) algorithm to design fractional order PID controllers for load-frequency control of two interconnected power systems by considering the two conflicting time domain objectives, including the integral of time multiplied squared error of frequency deviation, and the integral of the squared deviation in the controller output. These research results have also shown that the proposed chaotic NSGA-II-based FOPID controller performs better than the standard PID controller under nominal operating and perturbed operating conditions. On the other hand, these research works have also indicated that the optimization algorithms play critical roles in the performance of FOPID controllers. Consequently, how to design intelligent optimization methods especially multi-objective evolutionary algorithms to further improve the comprehensive performance of FOPID controllers for frequency control of islanded microgrids is of great practical significance.
Extremal optimization (EO) [
28,
29] is a novel evolutionary optimization framework differing from traditional optimization algorithms due to its prominent far-from-equilibrium characteristics, imitating the theory of self-organized criticality [
30]. In contrast to favoring the good in traditional evolutionary algorithms, EO always selects the bad elements or individuals for mutation based on a whole random or power-law probability distribution. Consequently, EO has attracted increasing attention recently for its wide applications in various benchmark and real-world engineering optimization problems [
31,
32]. However, there are only few multi-objective evolutionary algorithms based on the EO mechanism [
33,
34,
35,
36,
37]. An individual elitist (1+
λ) multi-objective extremal optimization algorithm [
33] is based on a single solution and a hybrid mutation operator combining Gaussian mutation with Cauchy mutation to enhance the exploratory capabilities. In our recent research work, a modified multi-objective extremal optimization based on individual iterated optimization mechanisms has been presented to design FOPID controllers for automatic voltage regulator systems [
37]. On the other hand, another version called multi-objective population-based extremal optimization (MOPEO) is proposed by combining population-based optimization mechanism and a popular mutation operator called non-uniform mutation [
34]. Furthermore, an improved version is proposed by adopting population-based iterated optimization, a more effective mutation operation called polynomial mutation, and a novel and more effective mechanism for generating new population [
36].
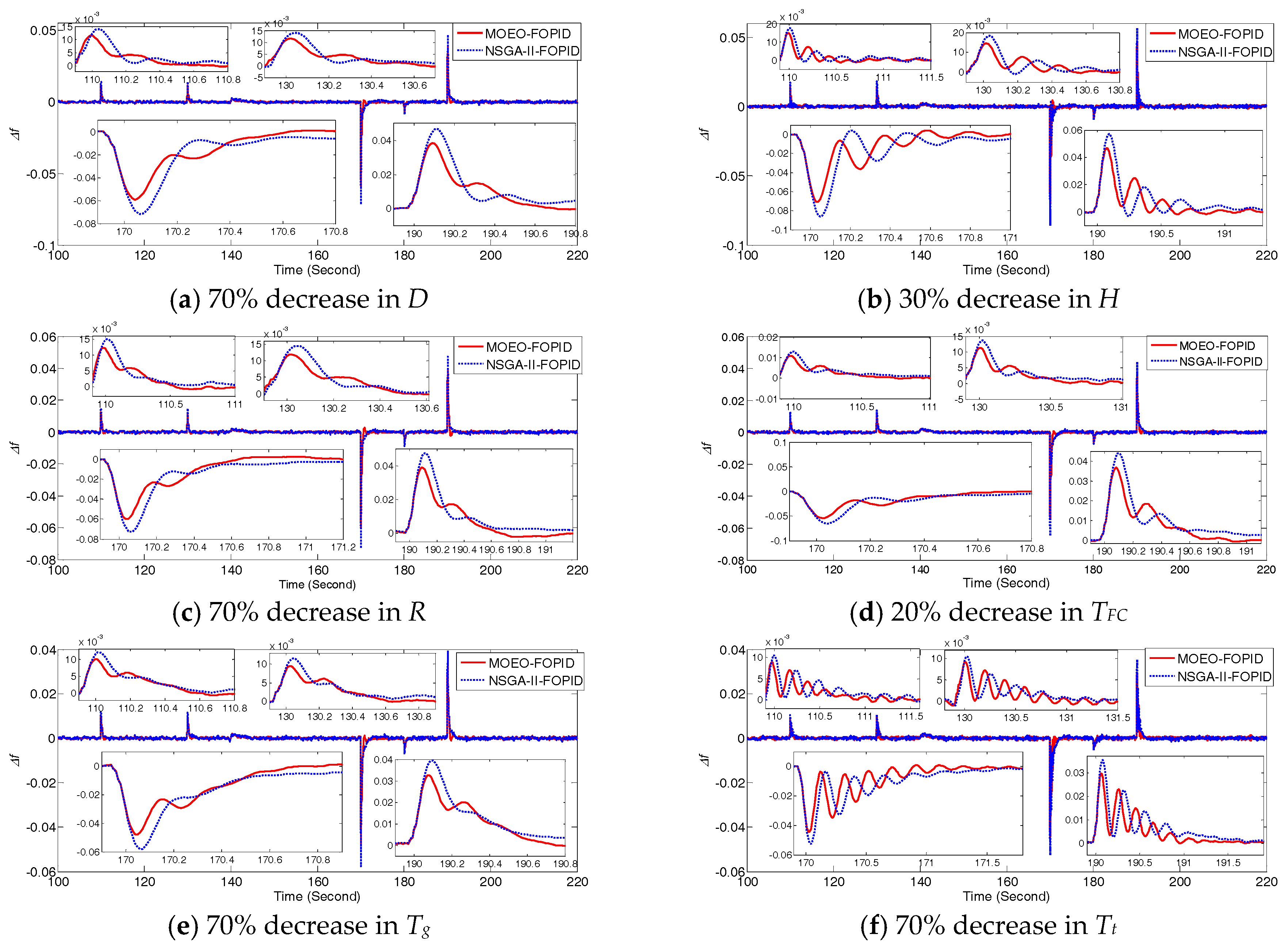
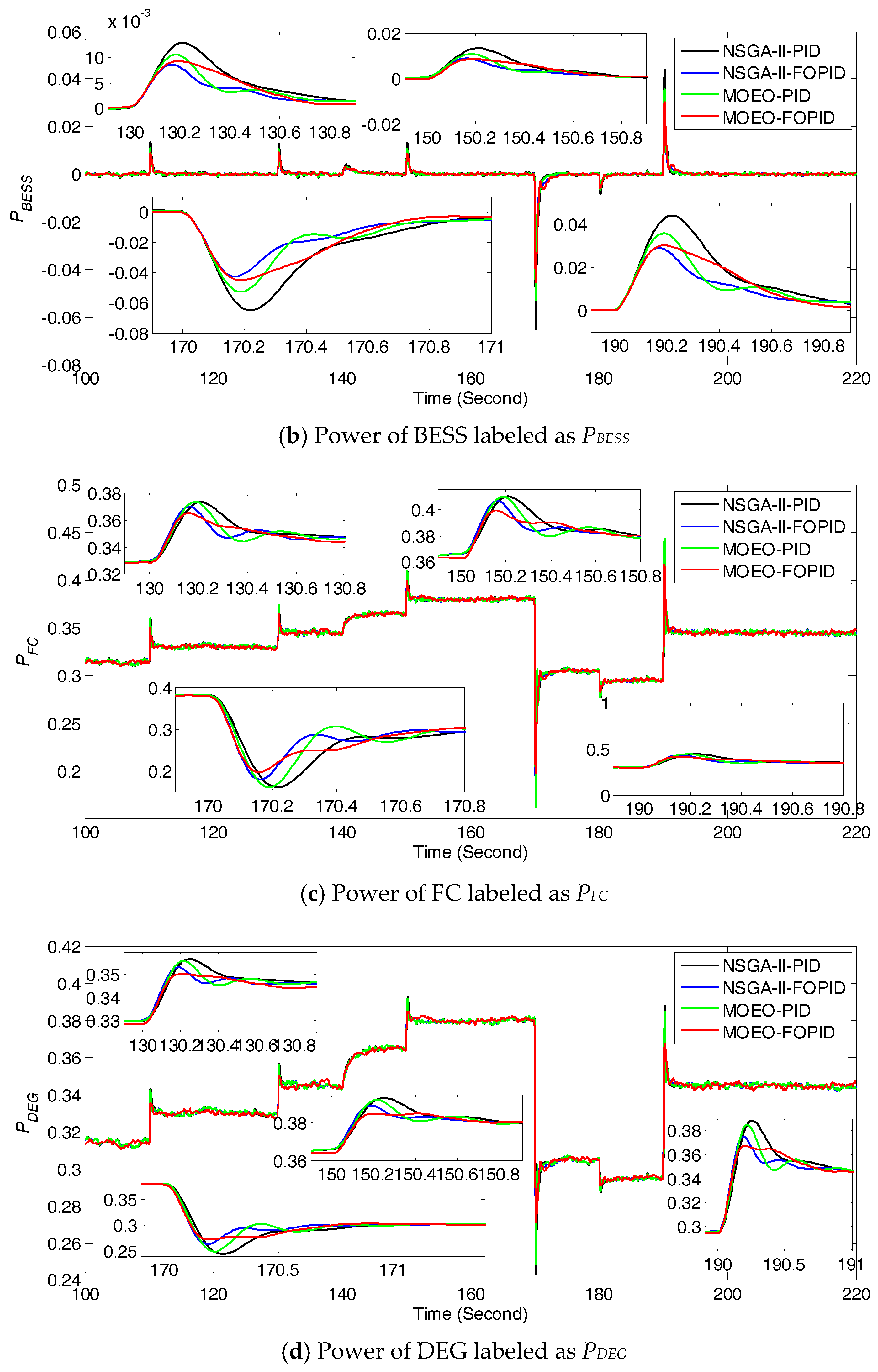
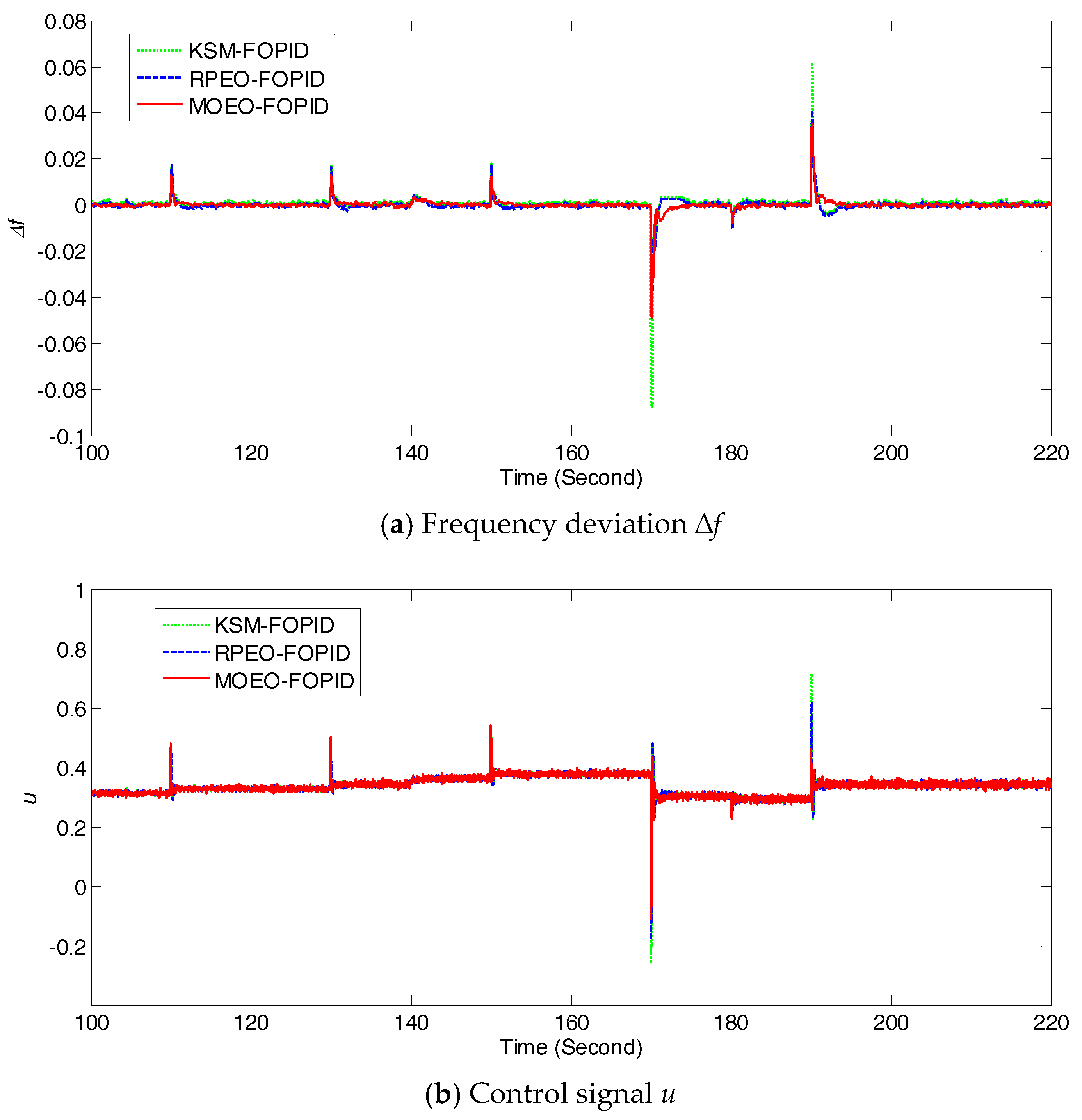
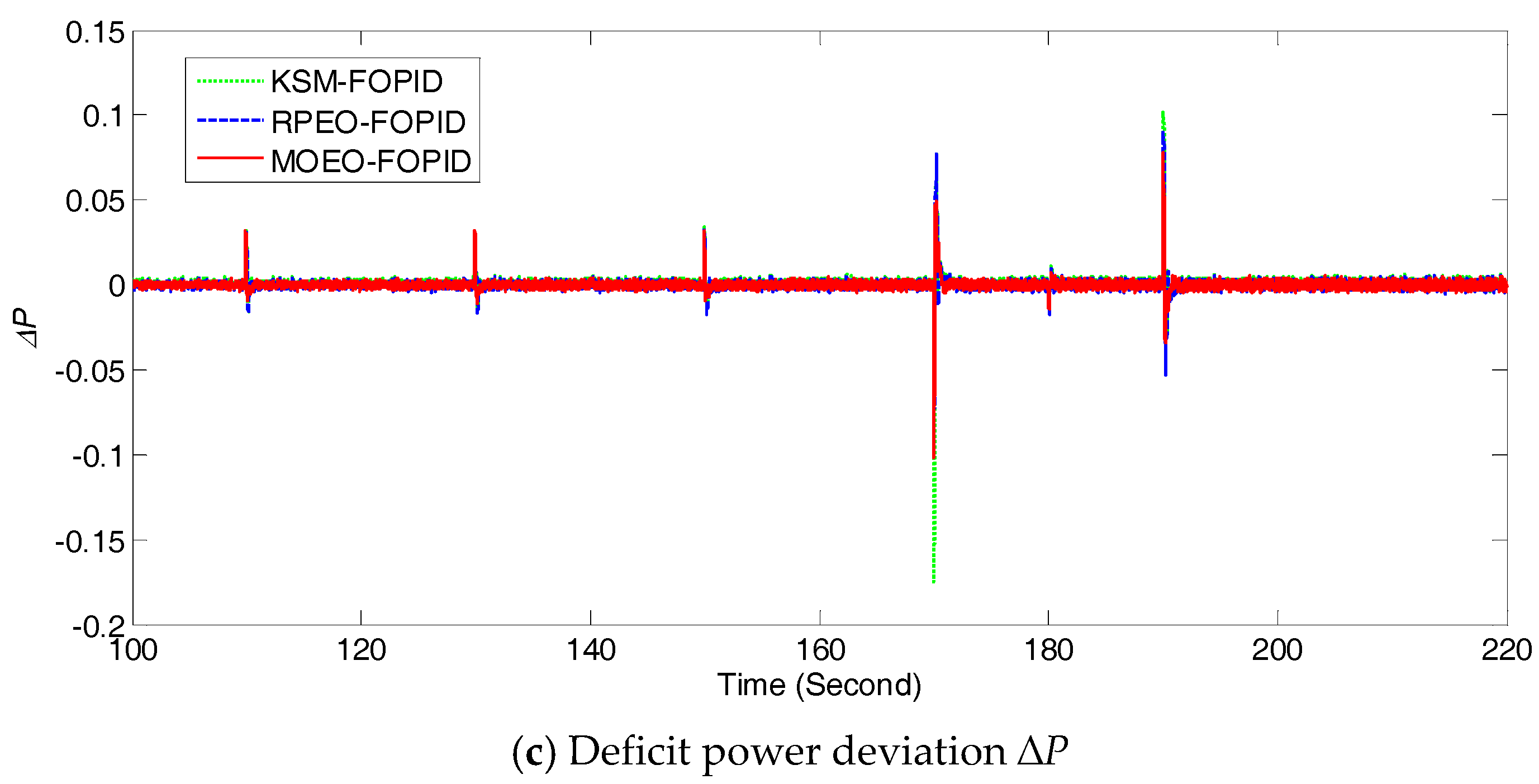
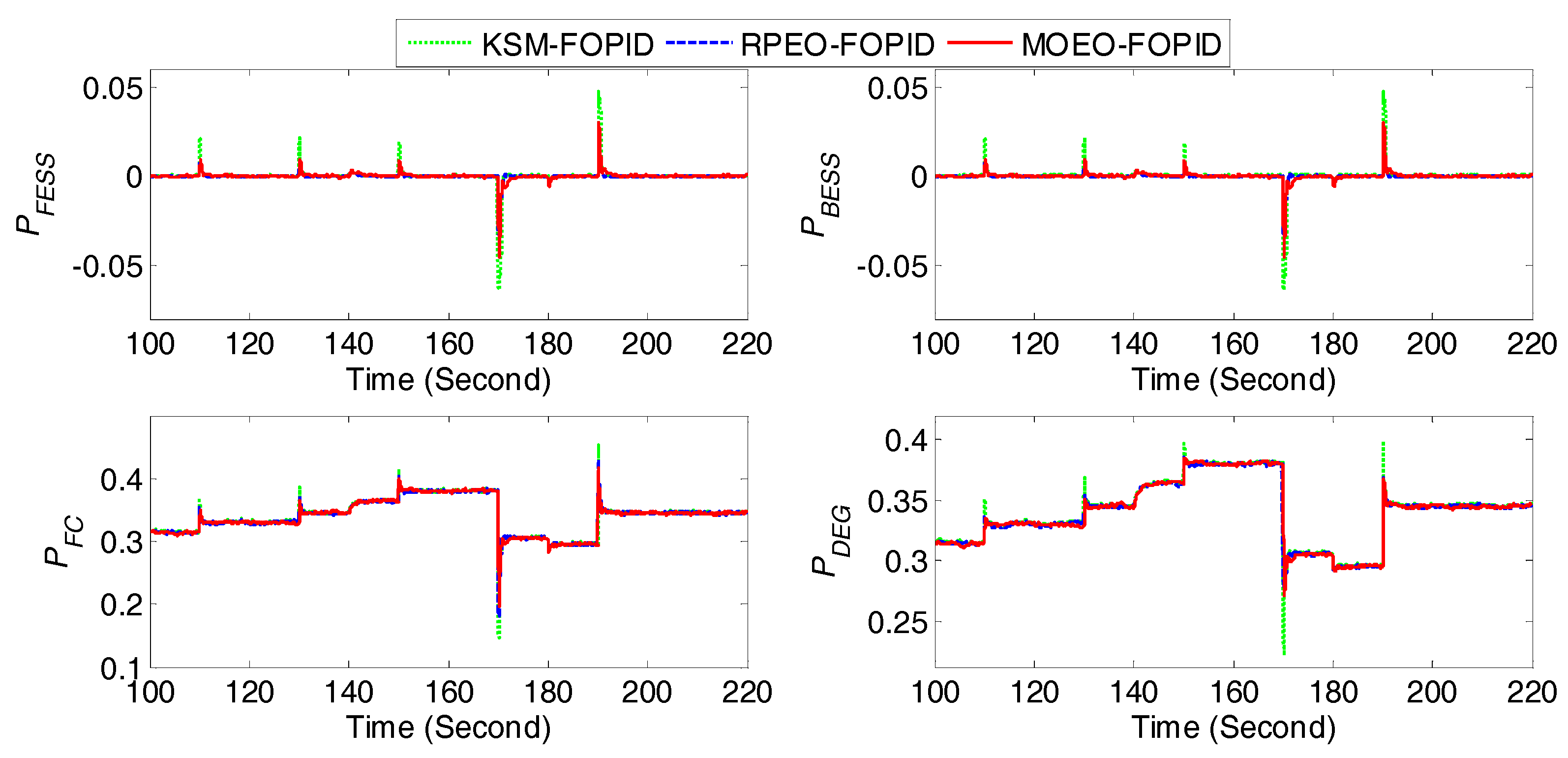
Unfortunately, to the best of our knowledge, there are few reported research works concerning the application of EO into the control of microgrids and other power systems, let alone multi-objective EO algorithms into microgrids. This paper proposes a multi-objective extremal optimization (MOEO)-based FOPID method called MOEO-FOPID for the fractional order frequency control of an islanded microgrid in order to improve the efficient operation of distributed generations and energy storage devices. Its superiority to other recently reported single-objective evolutionary algorithms-based FOPID [
22,
25], and NSGA-II-based FOPID/PID controllers [
20,
38] will be demonstrated by the simulation results for the typical case of an islanded microgrid.
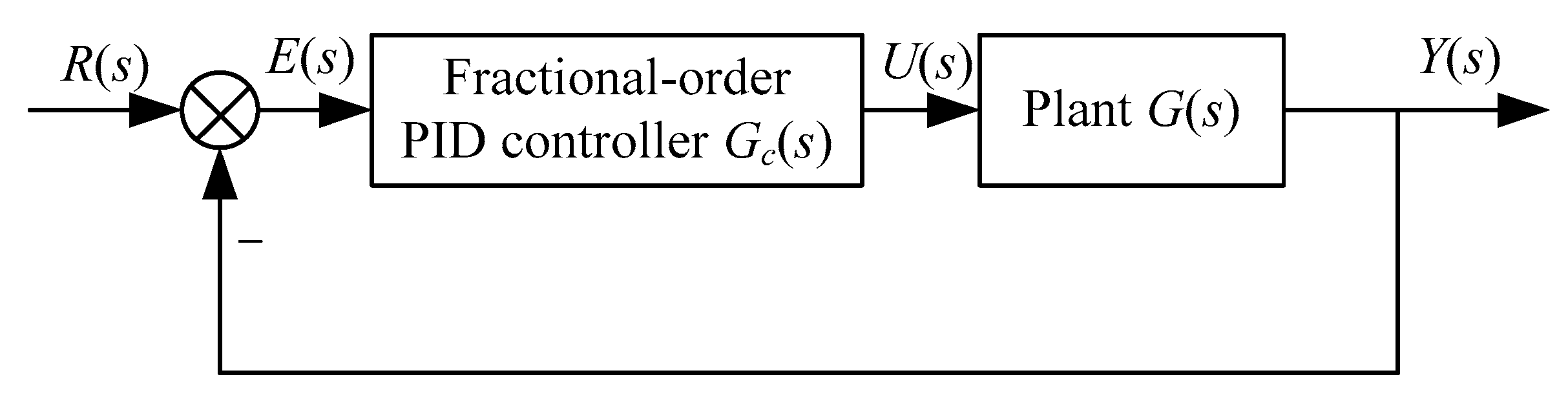
The rest of this paper is structured as follows. Some basic definitions of a FOPID controller and multi-objective optimization are introduced briefly in
Section 2.
Section 3 presents a small-signal model of an islanded microgrid. Then, a MOEO-FOPID method for the frequency control of an islanded microgrid is proposed in
Section 4.
Section 5 gives the simulation results for a typical microgrid to demonstrate the superiority of MOEO-FOPID to other reported optimization algorithms-based FOPID and PID controllers. Finally, some concluding remarks are presented in
Section 6.
3. Microgrid Models Based on Small-Signal Analysis
There are some reported research works concerning small-signal analysis for hybrid distributed generation systems or microgrids [
8,
9,
10].
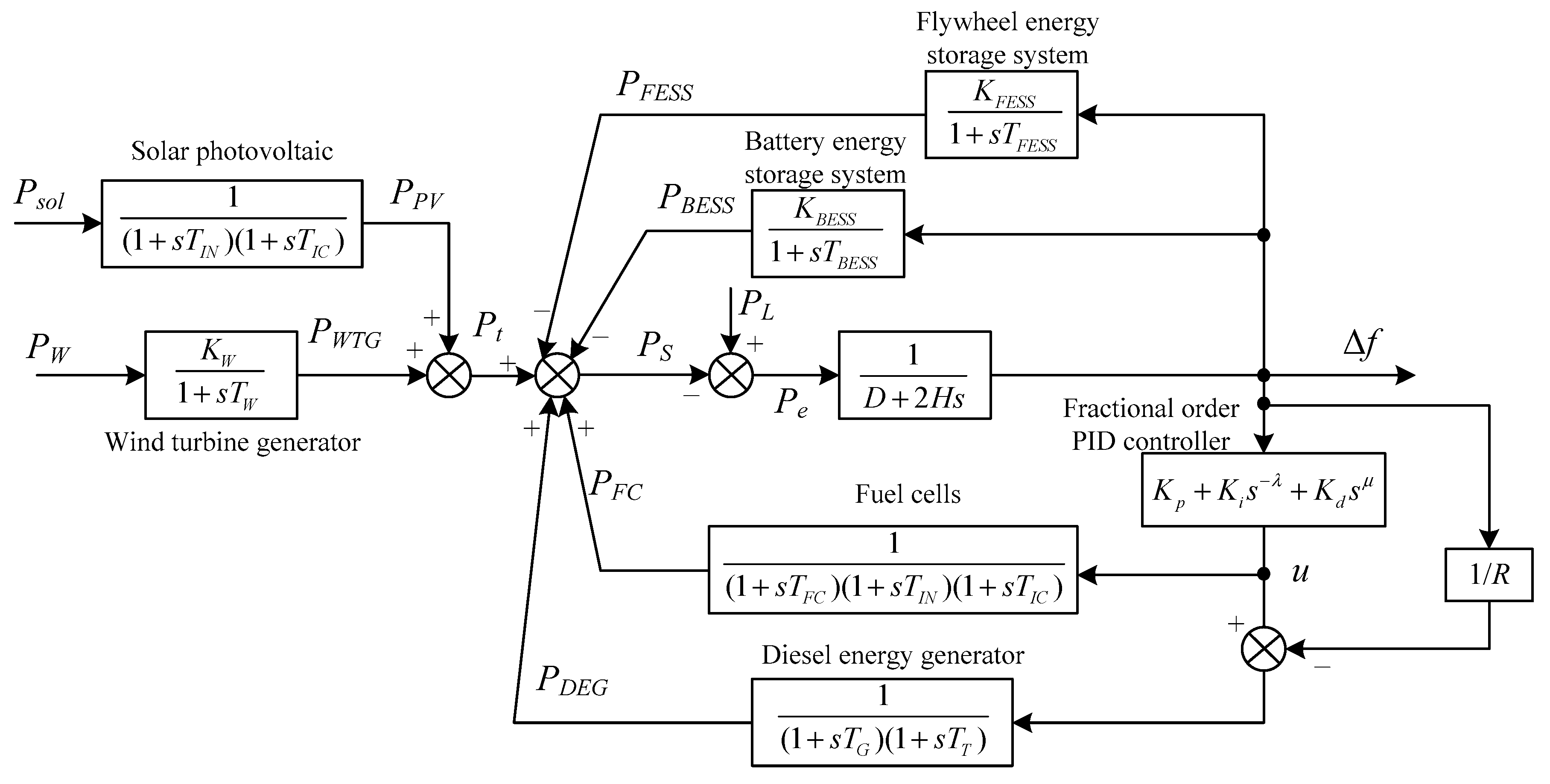
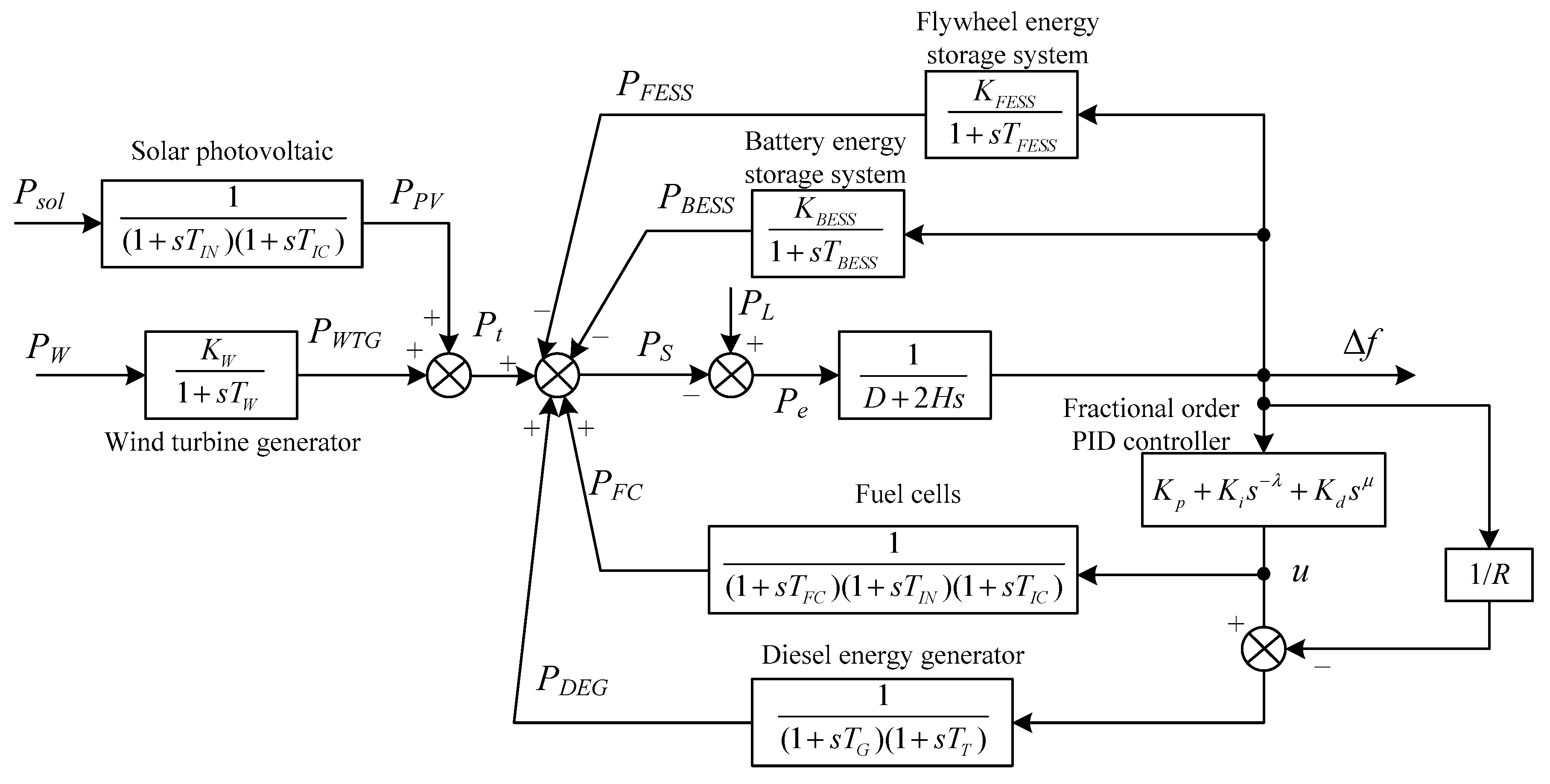
Figure 2 presents a block diagram of a typical islanded microgrid [
25]. The transfer functions and model parameters of distributed energy power generations including wind turbine generator (WTG), solar photovoltaic (PV) system, diesel engine generator (DEG), fuel cell (FC), and energy storage systems, e.g., battery energy storage system (BESS) and flywheel energy storage system (FESS) are described as
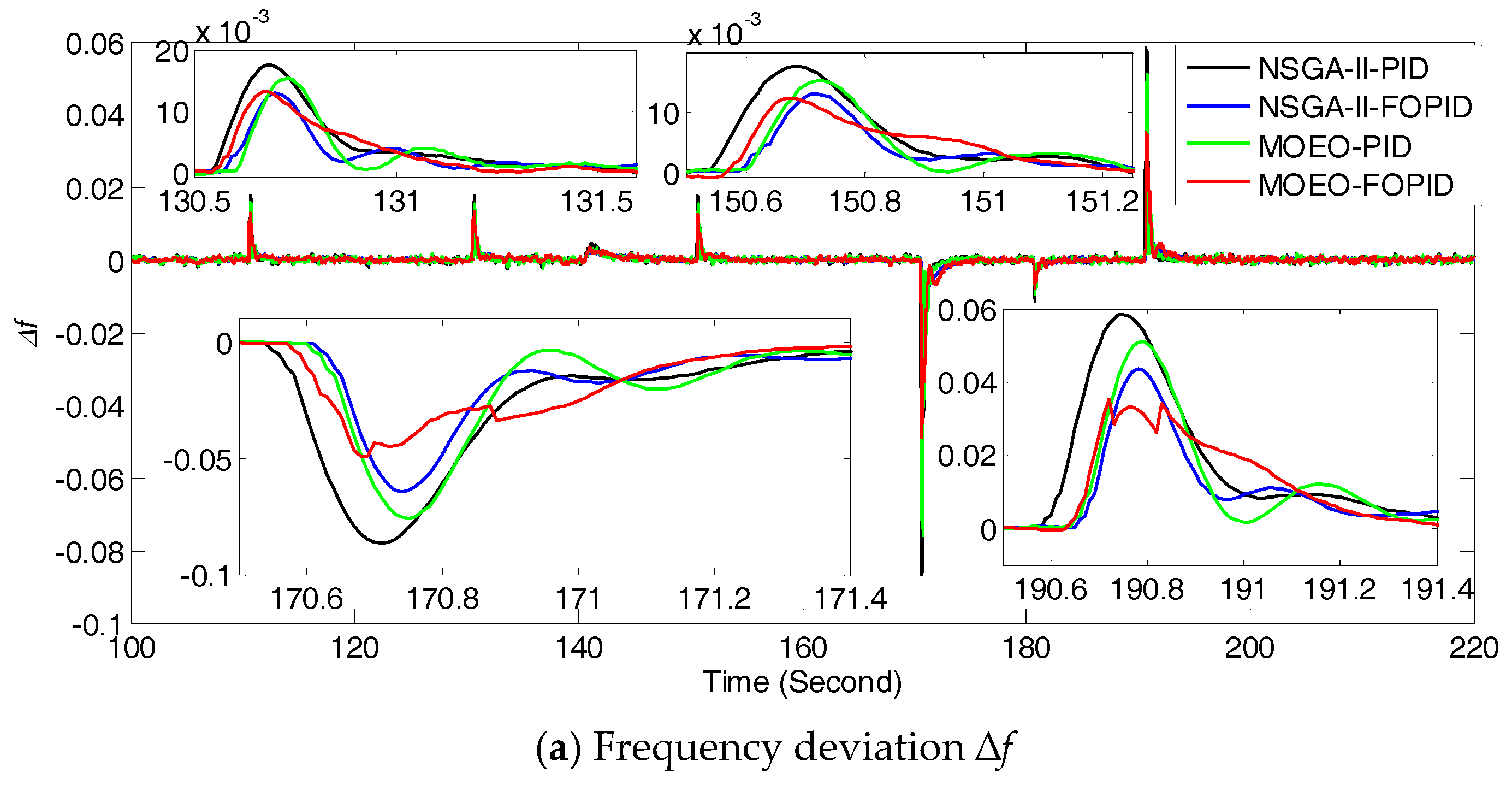
Table 1. Here, ∆
f is the frequency deviation;
u is the control signal from FOPID based frequency controller;
Psol and
PW are the input stochastic power of PV and WTG, respectively;
PPV,
PWTG,
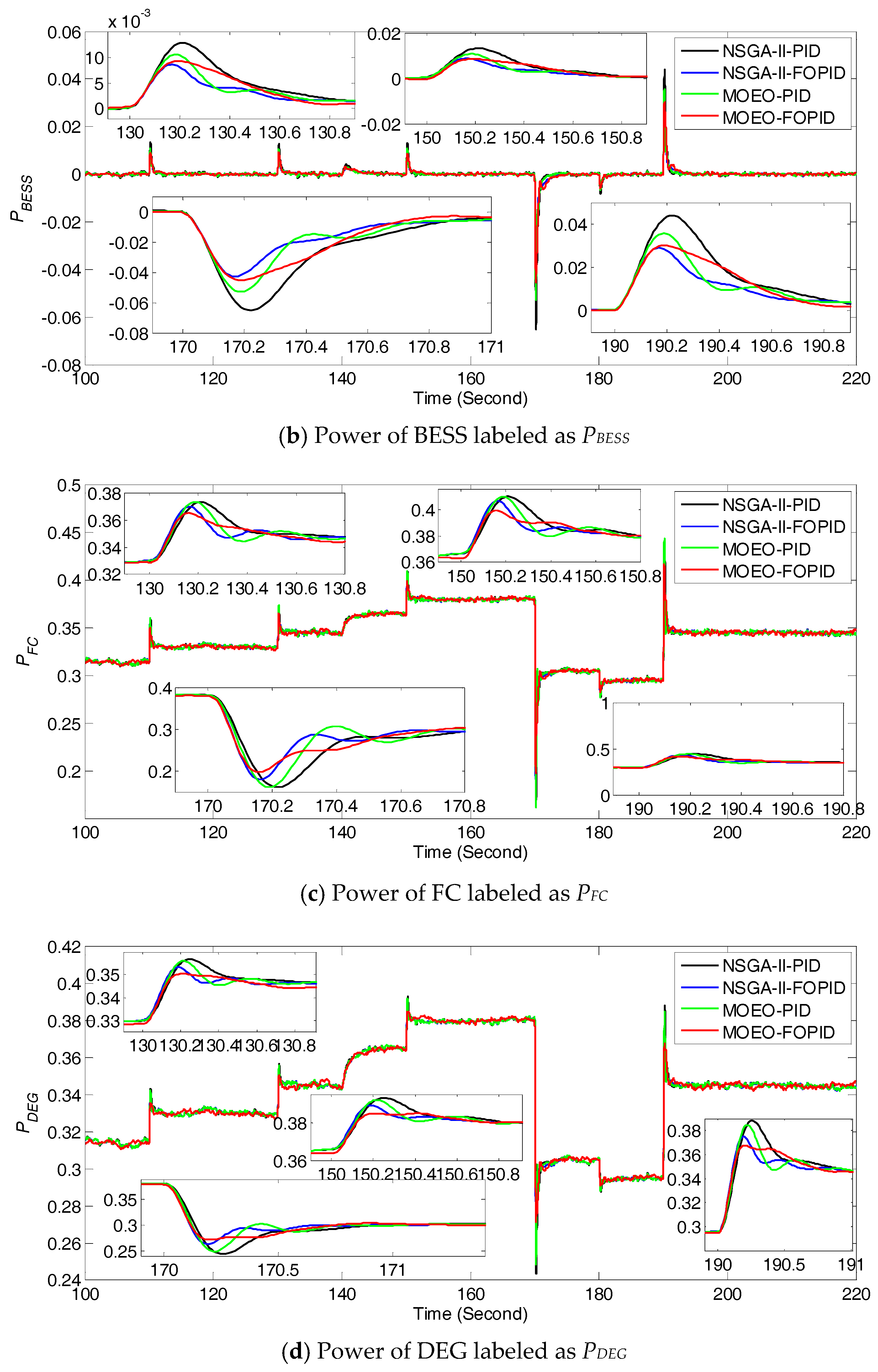
PDEG,
PFC,
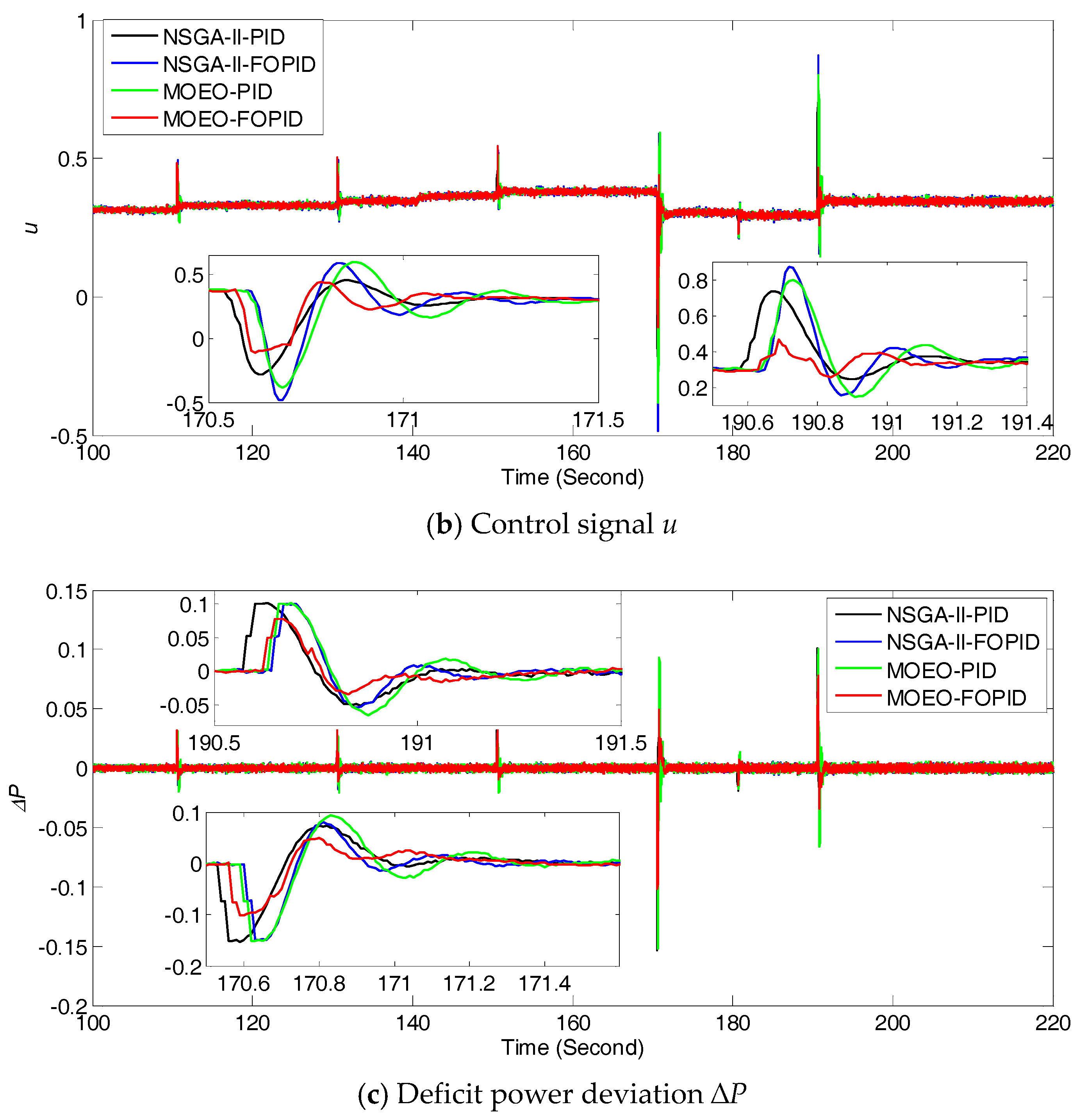
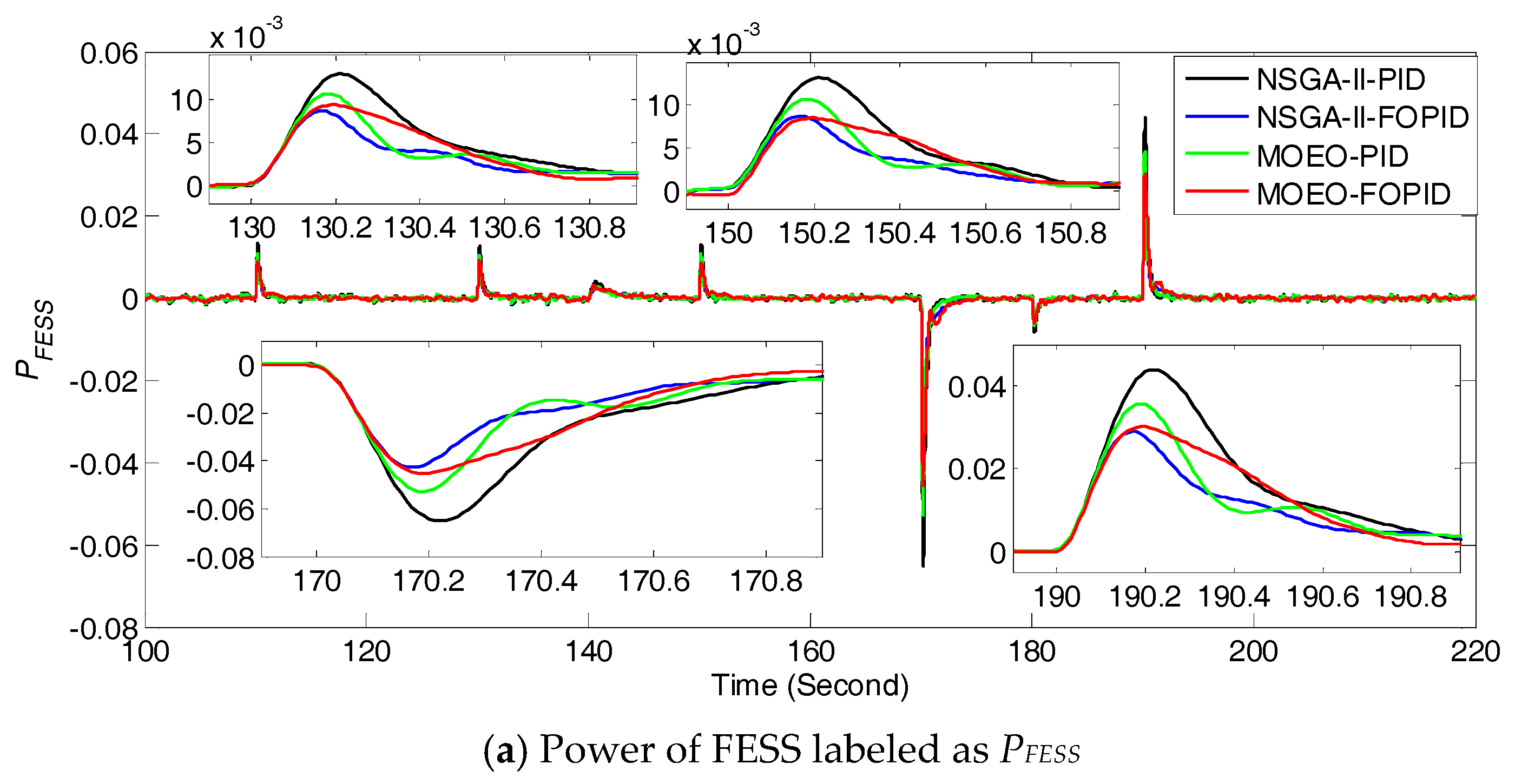
PBESS and
PFESS are the output power of PV, WTG, DEG, FC, BESS and FESS, respectively, and
PL is the variable load power. Some intermediate variables are computed as follows
: Pt = PPV +
PWTG,
PS = Pt +
PFC + PDEG − PBESS − PFESS, and
Pe = PL − PS.We consider large deterministic drift and random fluctuations for solar photovoltaic generation, wind generation, and demand-side loads, which are described as the following general model [
13]:
where
P is the stochastic power,
ϕ represents the stochastic component and
β is a parameter that contributes to the mean value of the power, respectively.
G(
s) denotes the transfer function of a low pass filter;
η is a normalized parameter to make the generated or demand power χ match the per unit (pu) level; and Γ describes a time-variable signal of fluctuation for stochastic power output. The detailed parameters of stochastic models for distributed generators and demand load are given as
Table 2. Here, U(−1, 1) presents random uniform function between −1 and 1, and
H(
t) denotes Heaviside step function.
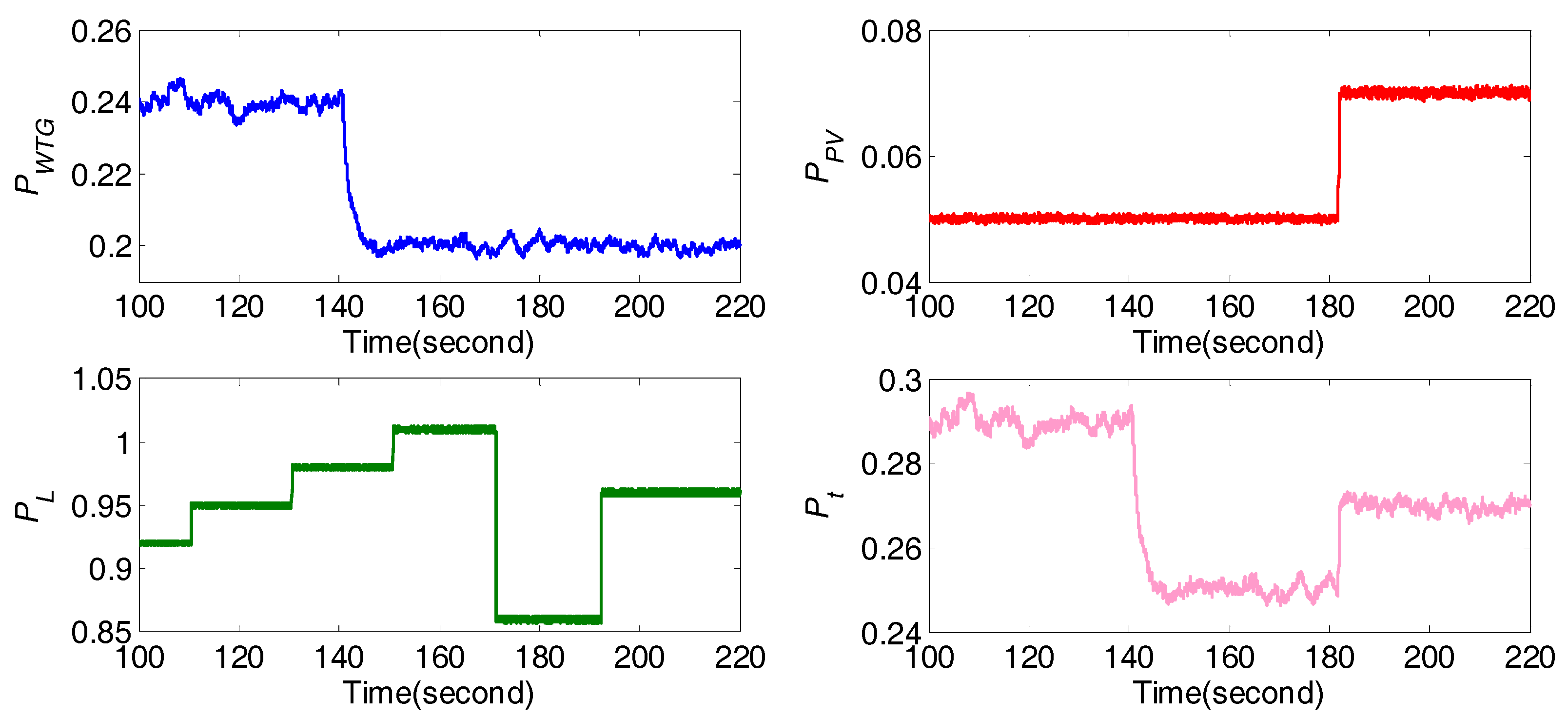
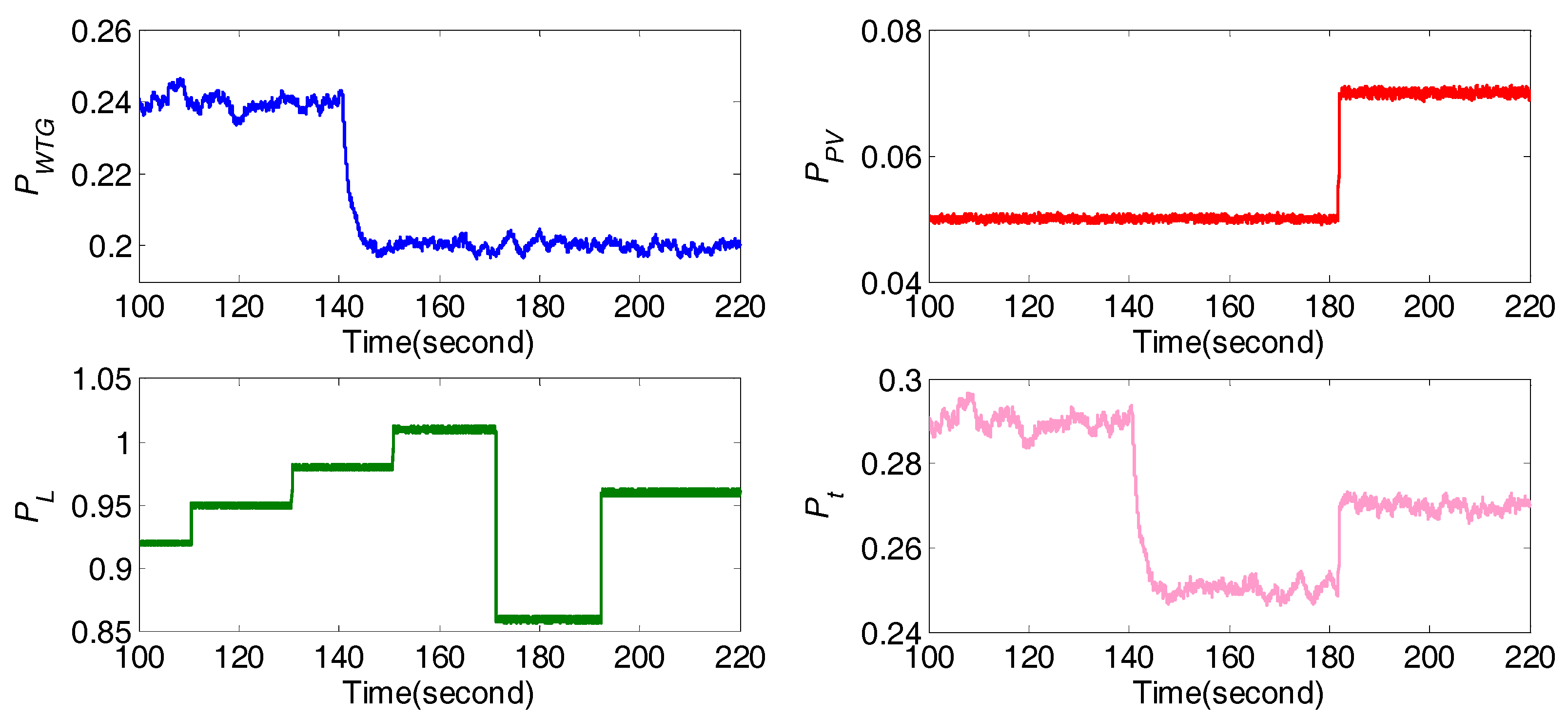
Figure 3 illustrates the realization of the stochastic powers of WTG, PV and demand-side loads.
4. Multi-Objective Extremal Optimization Based FOPID Method for the Frequency Control of Islanded Microgrids
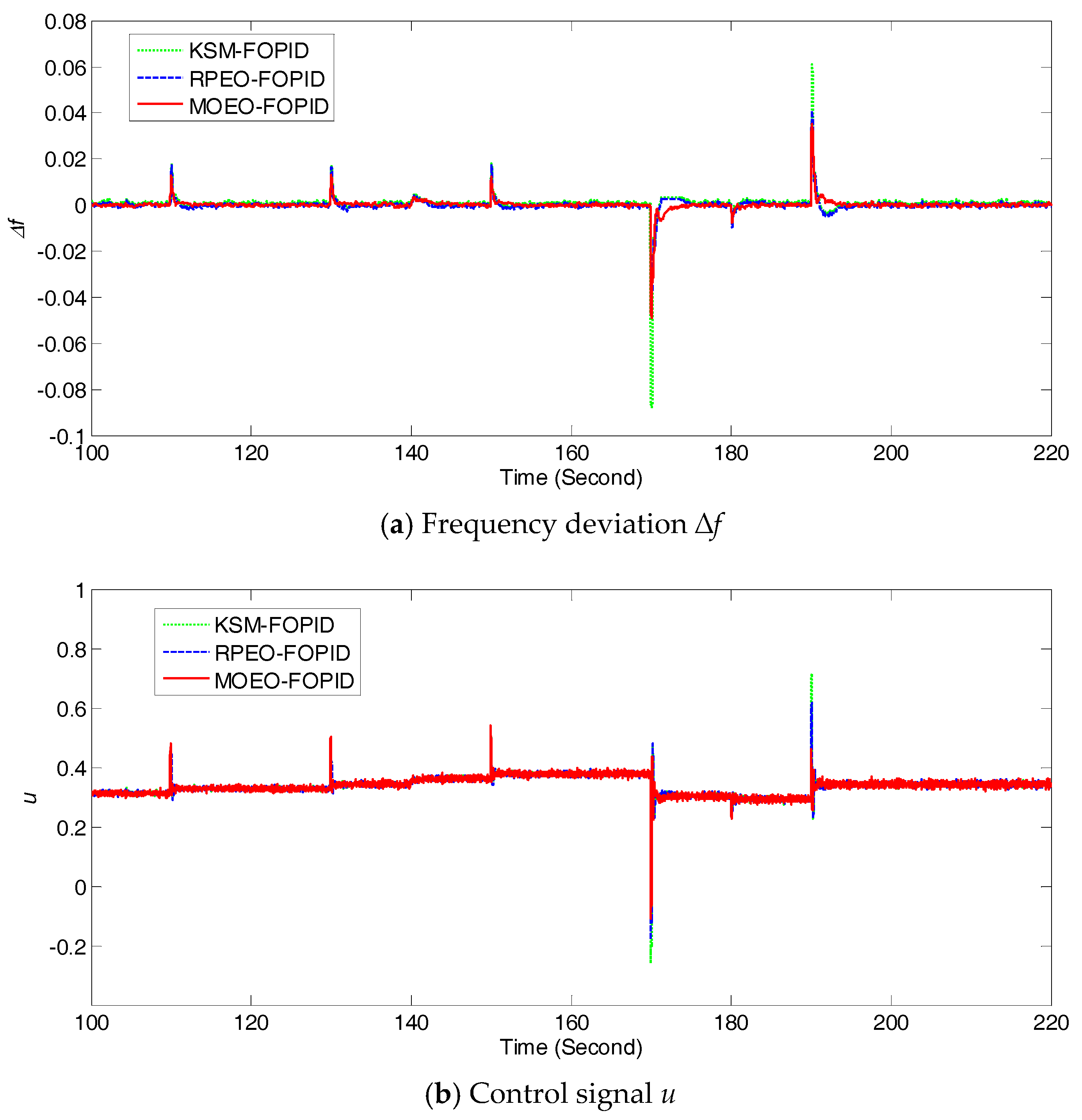
In order to obtain good frequency control performance for an islanded microgrid, both the frequency deviation (Δf) in the microgrid and the control output signal (u) of the FOPID controller are expected to be minimized, yet these two objectives are generally conflictive. Consequently, the frequency control problem of an islanded microgrid based on a FOPID controller is formulated to a typical multi-objective optimization problem. The detailed formulation is as follows.
Definition 2. The following two objectives F1 and F2 subject to some given constraints are defined to evaluate the performance of a FOPID controller x = (Kp, Ki, Kd, λ, μ) for the frequency control of an islanded microgrid.where PFESSmax, PBESSmax, PFCmax, PDEGmax are the output saturations (in pu) of PFESS, PBESS, PFC, PDEG, respectively; PFESSr, PBESSr, PFCr, PDEGr are the rate of PFESS, PBESS, PFC, PDEG, respectively;
PFESSrmax, PBESSrmax, PFCrmax, PDEGrmax are the maximum constraints of PFESSr, PBESSr, PFCr, PDEGr, respectively; and L and U represent the lower and upper bounds of the FOPID controller parameters, respectively. In this paper, a multi-objective extremal optimization based FOPID method, called MOEO-FOPID, is proposed to solve the aforementioned multi-objective optimization problem.
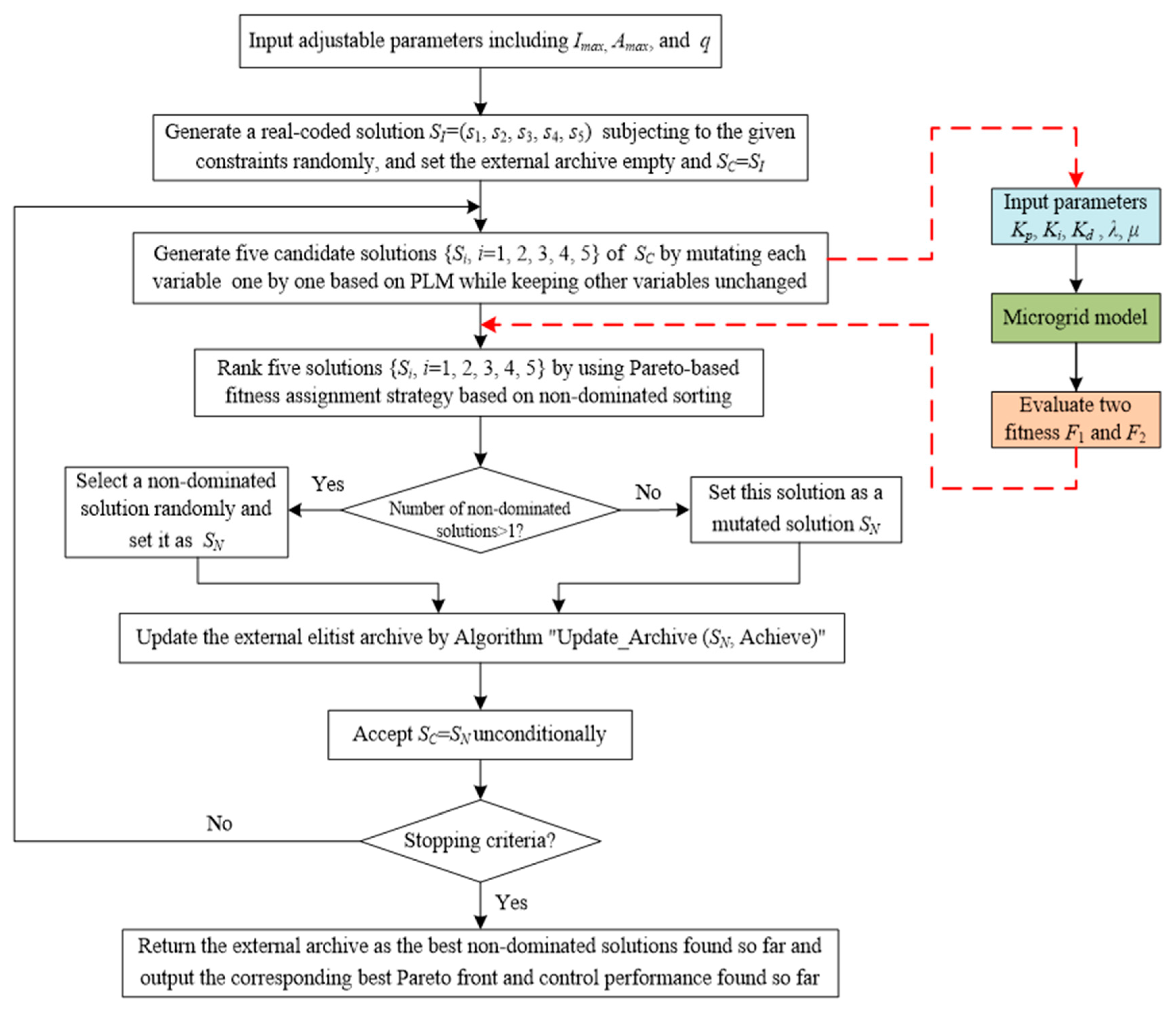
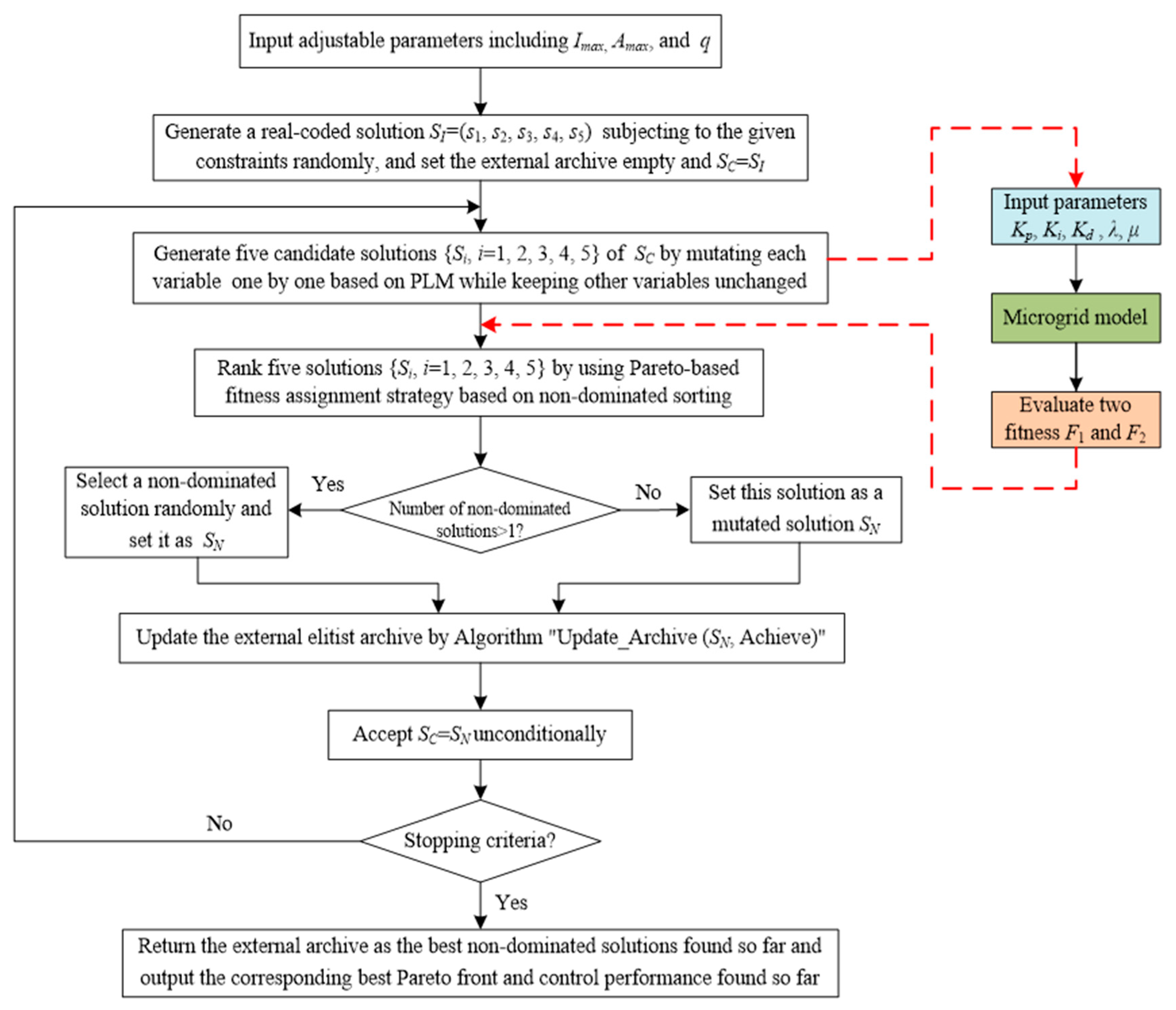
Figure 4 presents the flowchart of the proposed MOEO-FOPID-based frequency controller optimal design algorithm for an islanded microgrid.
MOEO-FOPID-Based Frequency Controller Optimal Design Algorithm for an Islanded Microgrid
Input: A microgrid system with a FOPID-based frequency controller and adjustable parameters used in the MOEO-FOPID algorithm, including the maximum number of iterations Imax, the maximum size of external archive Amax, and the shape parameter q used in mutation operation.
Output: The best non-dominated solutions for the designed FOPID-based frequency controller and the corresponding best Pareto front found so far.
- Step 1:
Generate a real-coded solution S = (s1,s2, s3, s4, s5) representing the control parameters of a FOPID-based frequency controller (Kp, Ki, Kd, λ, μ) in an islanded microgrid subject to the given constraints (10) randomly, and set the external archive A as empty and SC = S.
- Step 2:
By mutating each variable
si (
i = 1, 2, 3, 4, 5) of the current solution
SC one-by-one based on multi-non-uniform mutation (MNUM)while keeping other variables unchanged, generate five candidate solutions{
Si,
i = 1, 2, 3, 4, 5}. The detailed process is formulated as follows:
where
IC is the number of current iterations in the optimization process, both
r and
r1 are uniform random numbers between 0 and 1, and
q is the shape parameter used in MNUM.
- Step 3:
Rank five solutions {Si, i = 1, 2, 3, 4, 5} based on the non-dominated sorting strategy, where the two objective functions F1 and F2 are evaluated by Definition 2.
- Step 4:
If the number of non-dominated solutions is just one, then select the only non-dominated solution Snd as the new solution SN; otherwise, select one from several non-dominated solutions randomly, and set this one as the new solution SN.
- Step 5:
Update
A by algorithm “Update_Archive (
SN, Achieve)” [
37] shown in Algorithm 1.
- Step 6:
Accept SC = SN unconditionally.
- Step 7:
If the predefined stopping criteria, e.g., maximum number of iterations Imax is met, then return to Step 2; otherwise, go to Step 8.
- Step 8:
Return external archive A as the best non-dominated solutions for the FOPID controller for the frequency control of an islanded microgrid, and output the best Pareto front found so far and the corresponding control performance.
| Algorithm 1 The Pseudo-Code of Algorithm “Update_Archive (SN, Archive)” [37] |
| 1: Begin |
| 2: If the solution SN is dominated by at least one member of the archive, then |
| 3: The archive keeps unchanged |
| 4: Else if some members of archive are dominated by SN, then |
| 5: Remove all the dominated members from the archive and add SN to the archive |
| 6: End if |
| 7: Else |
| 8: If the number of archive is smaller than Amax, i.e., the predefined maximum number of the archive, then |
| 9: Add SN to the archive |
| 10: Else |
| 11: If SN resides in the most crowded region of the archive, then |
| 12: The archive keeps unchanged |
| 13: Else |
| 14: Replace the member in the most crowded region of the archive by SN |
| 15: End if |
| 16: End if |
| 17: End if |
| 18: End |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}