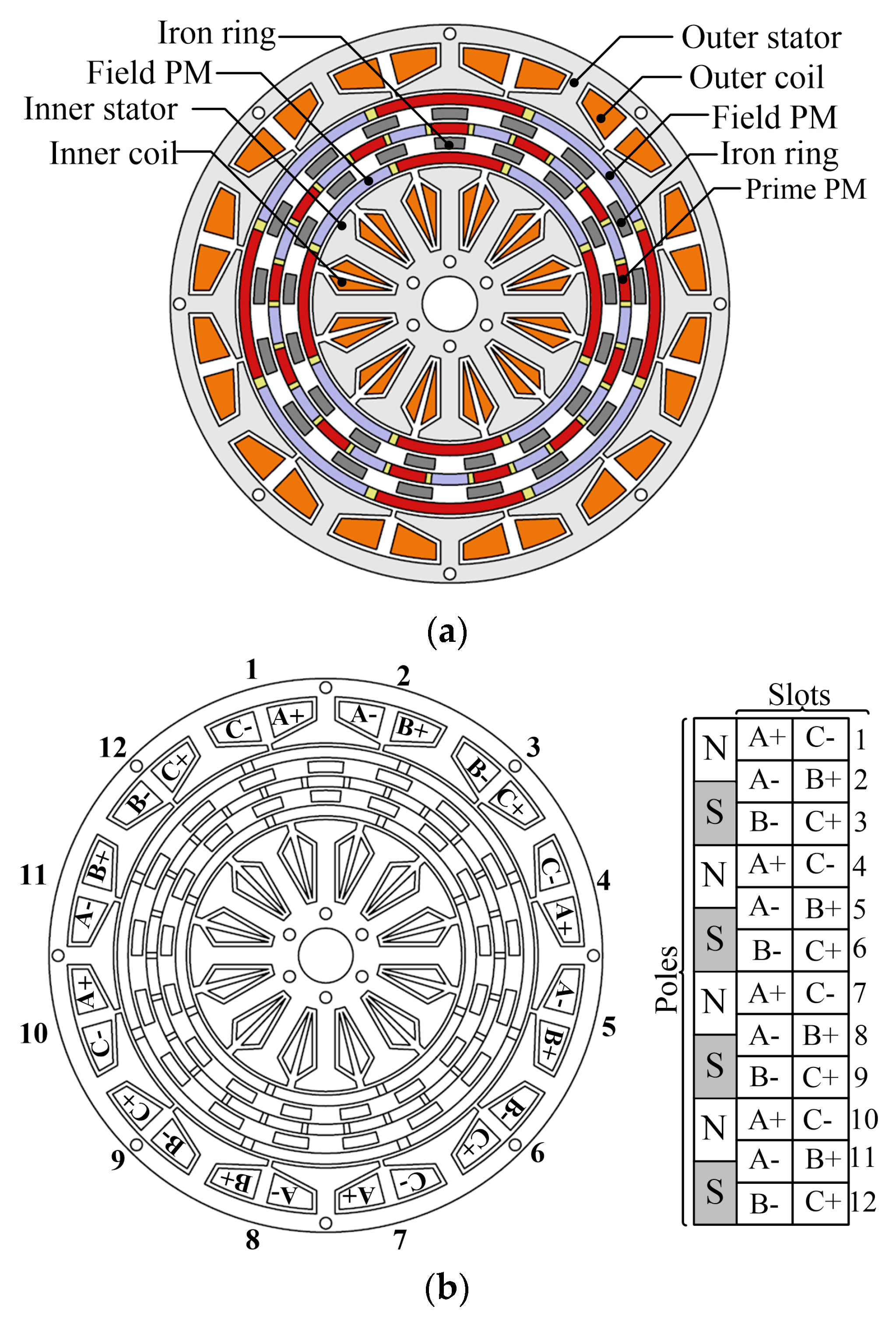
Figure 1.
Structure of double-stator permanent magnet generator integrated with a magnetic gear: (a) Two dimensional model view of structure; (b) Winding diagram.
Figure 1.
Structure of double-stator permanent magnet generator integrated with a magnetic gear: (a) Two dimensional model view of structure; (b) Winding diagram.
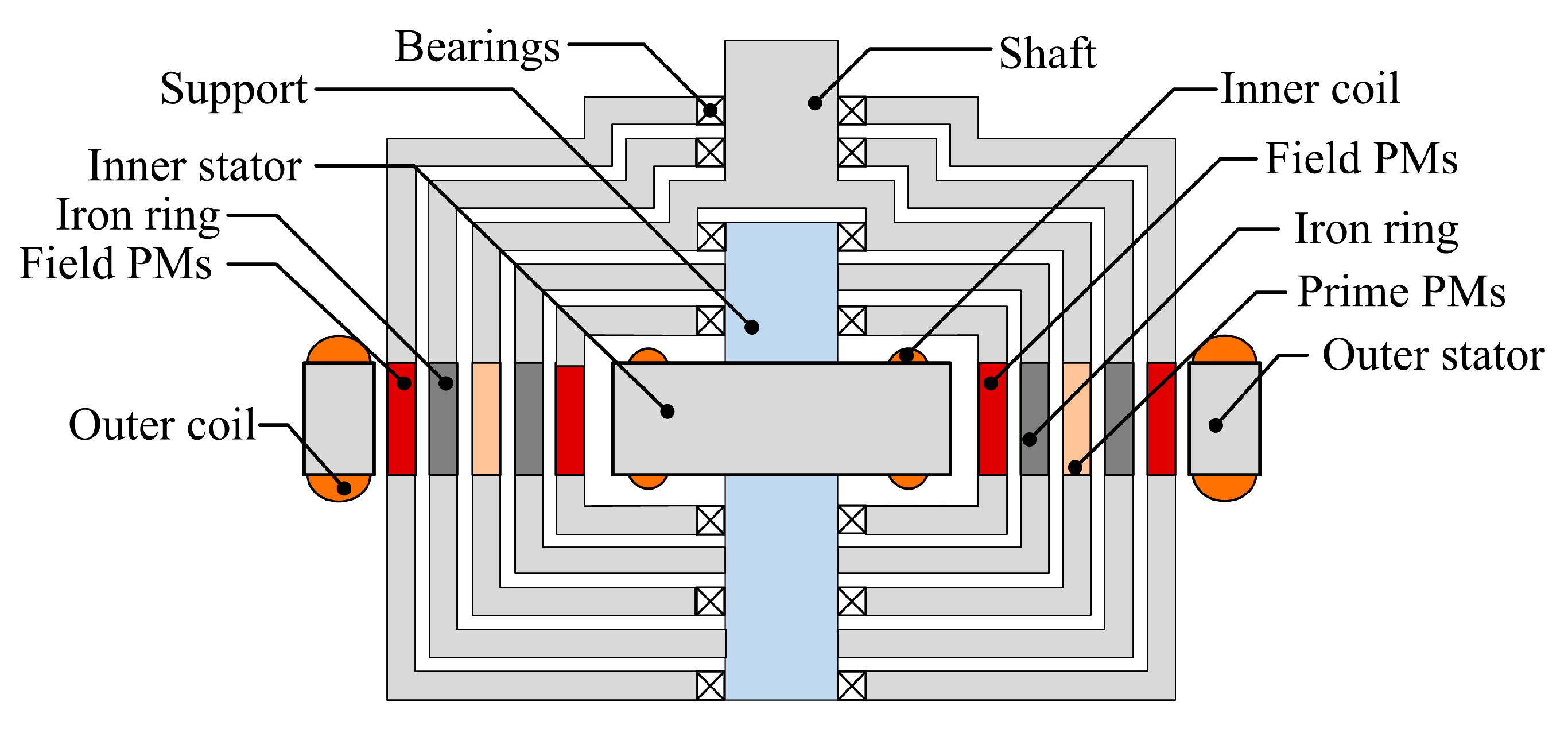
Figure 2.
Mechanical structure of double-stator magnetic geared permanent magnet generator.
Figure 2.
Mechanical structure of double-stator magnetic geared permanent magnet generator.
Figure 3.
Magnetic flux plot of the generator quarter section by 2D FEM on load: (a) Magnetic flux lines distribution; (b) Magnetic flux density distribution.
Figure 3.
Magnetic flux plot of the generator quarter section by 2D FEM on load: (a) Magnetic flux lines distribution; (b) Magnetic flux density distribution.
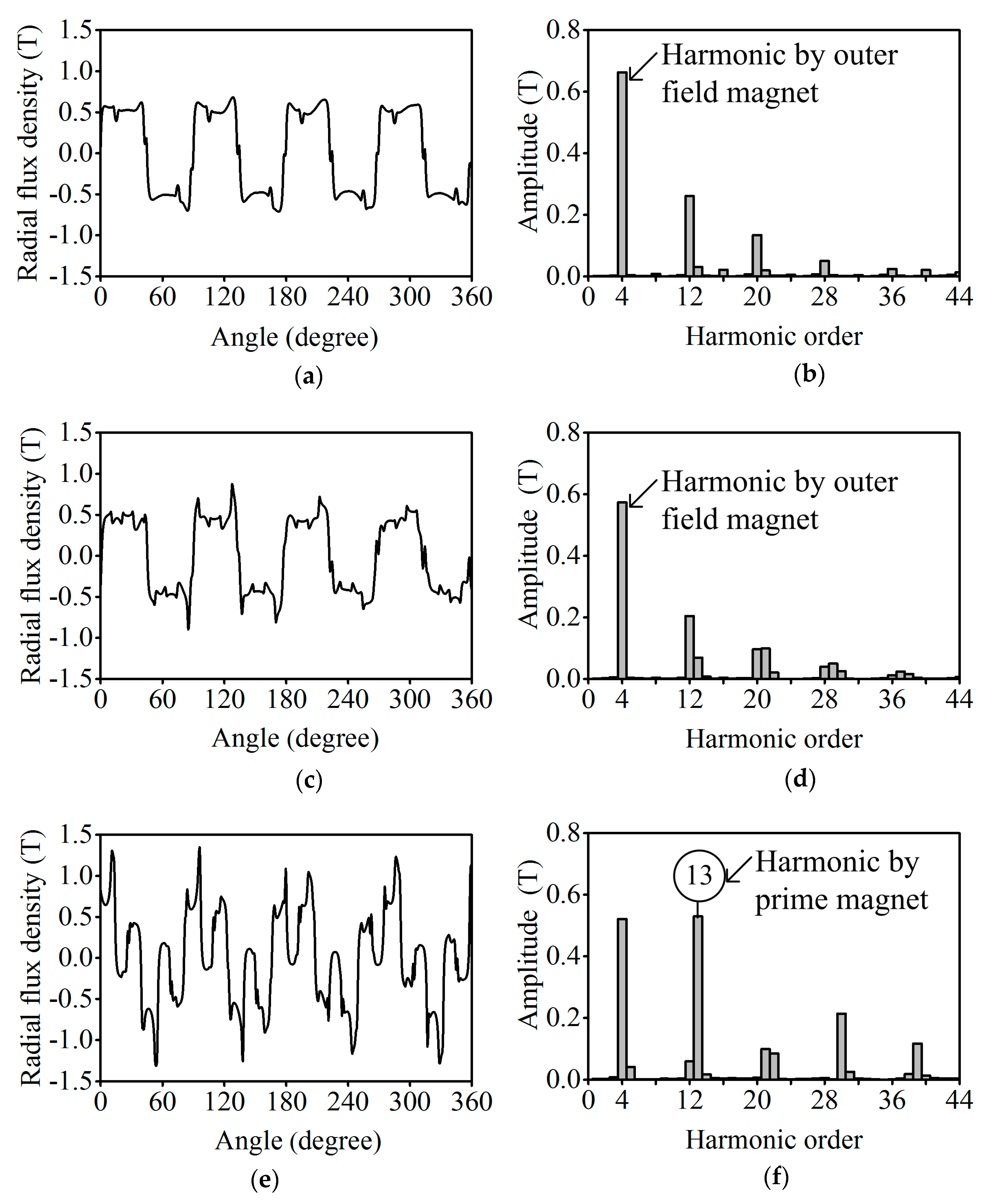
Figure 4.
The outer magnetic gear flux density characteristics: (a) Flux density between outer pole-pole ring and prime PM; (b) Fast Fourier Transform of (a); (c) Flux density between outer PM and outer pole-pole ring; (d) Fast Fourier Transform of (c); (e) Flux density between outer PM and outer stator; (f) Fast Fourier Transform of (e).
Figure 4.
The outer magnetic gear flux density characteristics: (a) Flux density between outer pole-pole ring and prime PM; (b) Fast Fourier Transform of (a); (c) Flux density between outer PM and outer pole-pole ring; (d) Fast Fourier Transform of (c); (e) Flux density between outer PM and outer stator; (f) Fast Fourier Transform of (e).
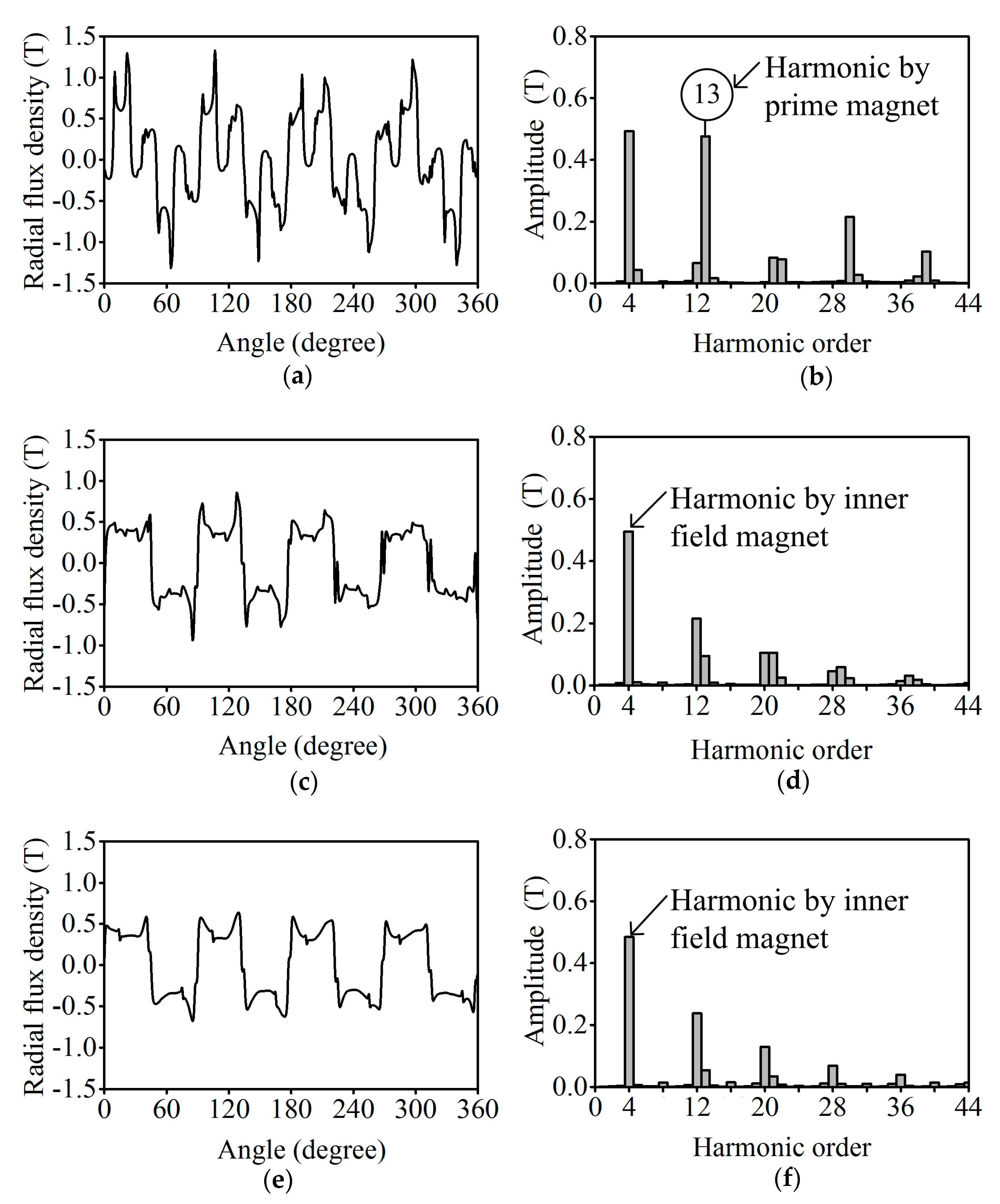
Figure 5.
The magnetic gear flux density characteristics in middle of three inner air-gaps: (a) Flux density between inner stator and inner field PM; (b) FFT from (a); (c) Flux density between inner field PM and inner iron ring; (d) FFT from (c); (e) Flux density between inner iron ring and prime PM; (f) FFT from (e).
Figure 5.
The magnetic gear flux density characteristics in middle of three inner air-gaps: (a) Flux density between inner stator and inner field PM; (b) FFT from (a); (c) Flux density between inner field PM and inner iron ring; (d) FFT from (c); (e) Flux density between inner iron ring and prime PM; (f) FFT from (e).
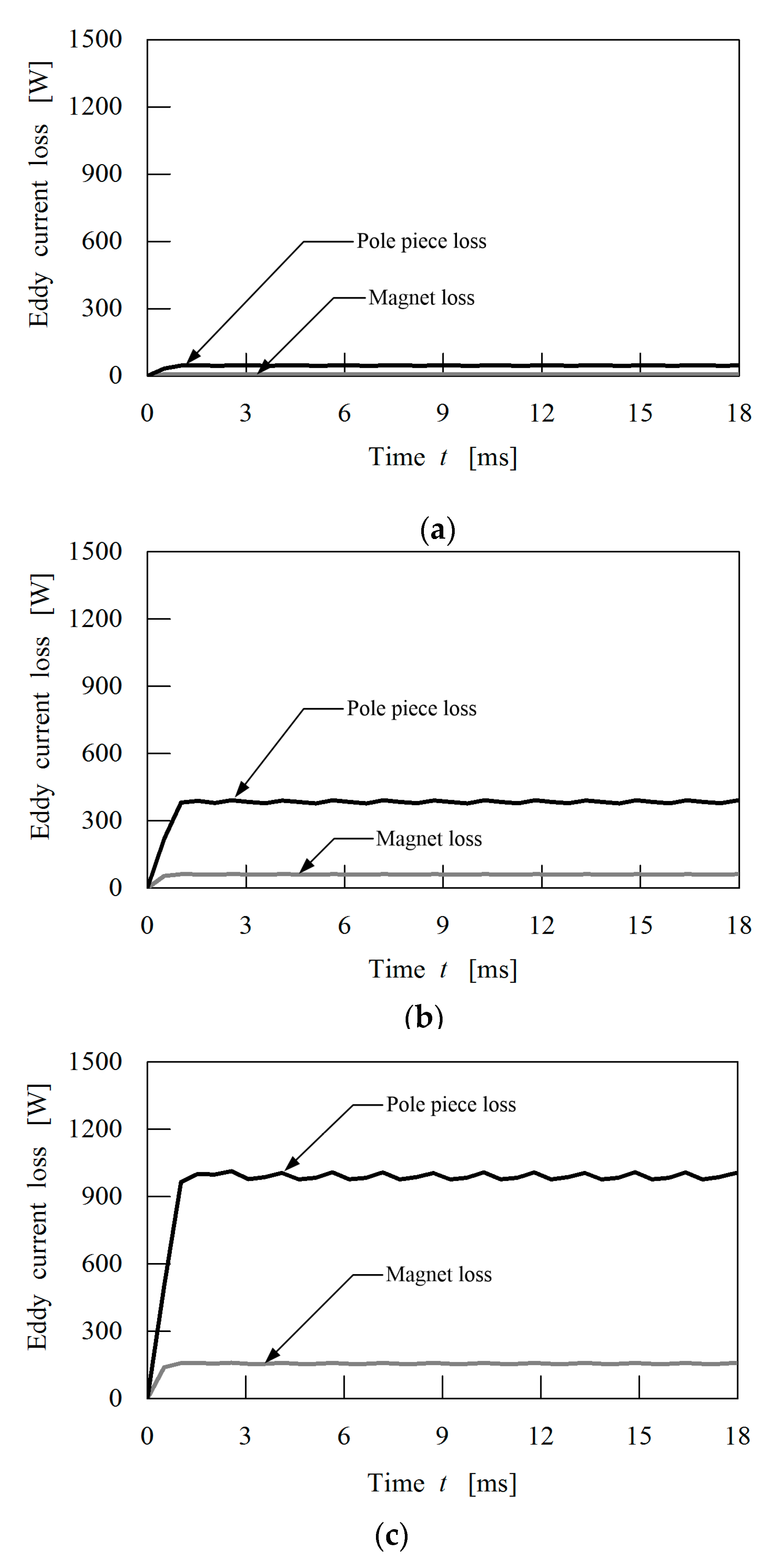
Figure 6.
Magnets and pole piece eddy current losses with resistive load of 31 Ω at various speeds: (a) Prime speed of 100 rpm; (b) Prime speed of 300 rpm; (c) Prime speed of 500 rpm.
Figure 6.
Magnets and pole piece eddy current losses with resistive load of 31 Ω at various speeds: (a) Prime speed of 100 rpm; (b) Prime speed of 300 rpm; (c) Prime speed of 500 rpm.
Figure 7.
Core and copper losses as a function of resistive load at various speeds: (a) Core losses; (b) Copper losses; (c) Core and copper losses.
Figure 7.
Core and copper losses as a function of resistive load at various speeds: (a) Core losses; (b) Copper losses; (c) Core and copper losses.
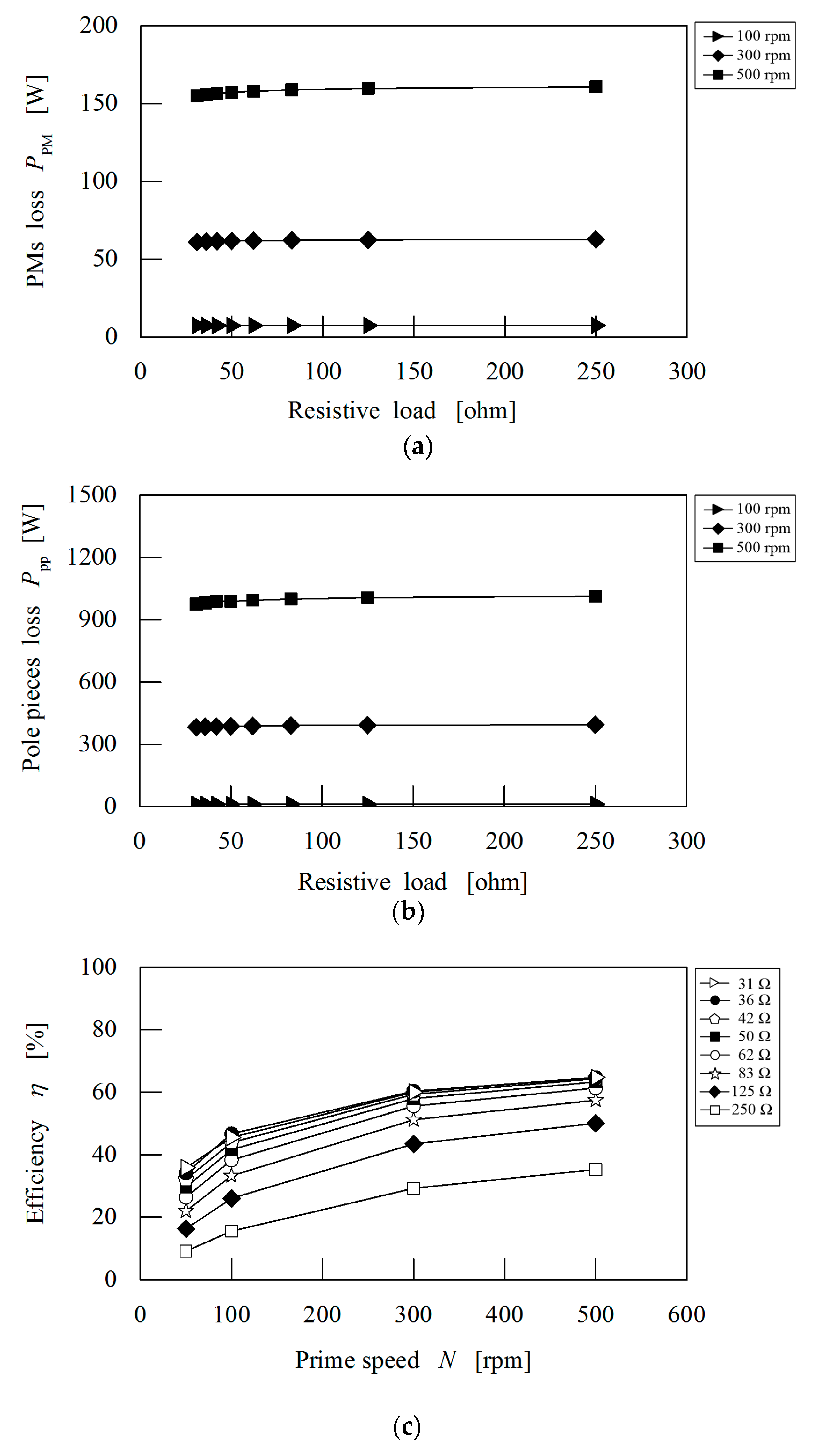
Figure 8.
Permanent magnets and pole piece losses as a function of resistive load at various speeds with efficiency: (a) Permanent magnets losses; (b) Pole piece losses; (c) Efficiency.
Figure 8.
Permanent magnets and pole piece losses as a function of resistive load at various speeds with efficiency: (a) Permanent magnets losses; (b) Pole piece losses; (c) Efficiency.
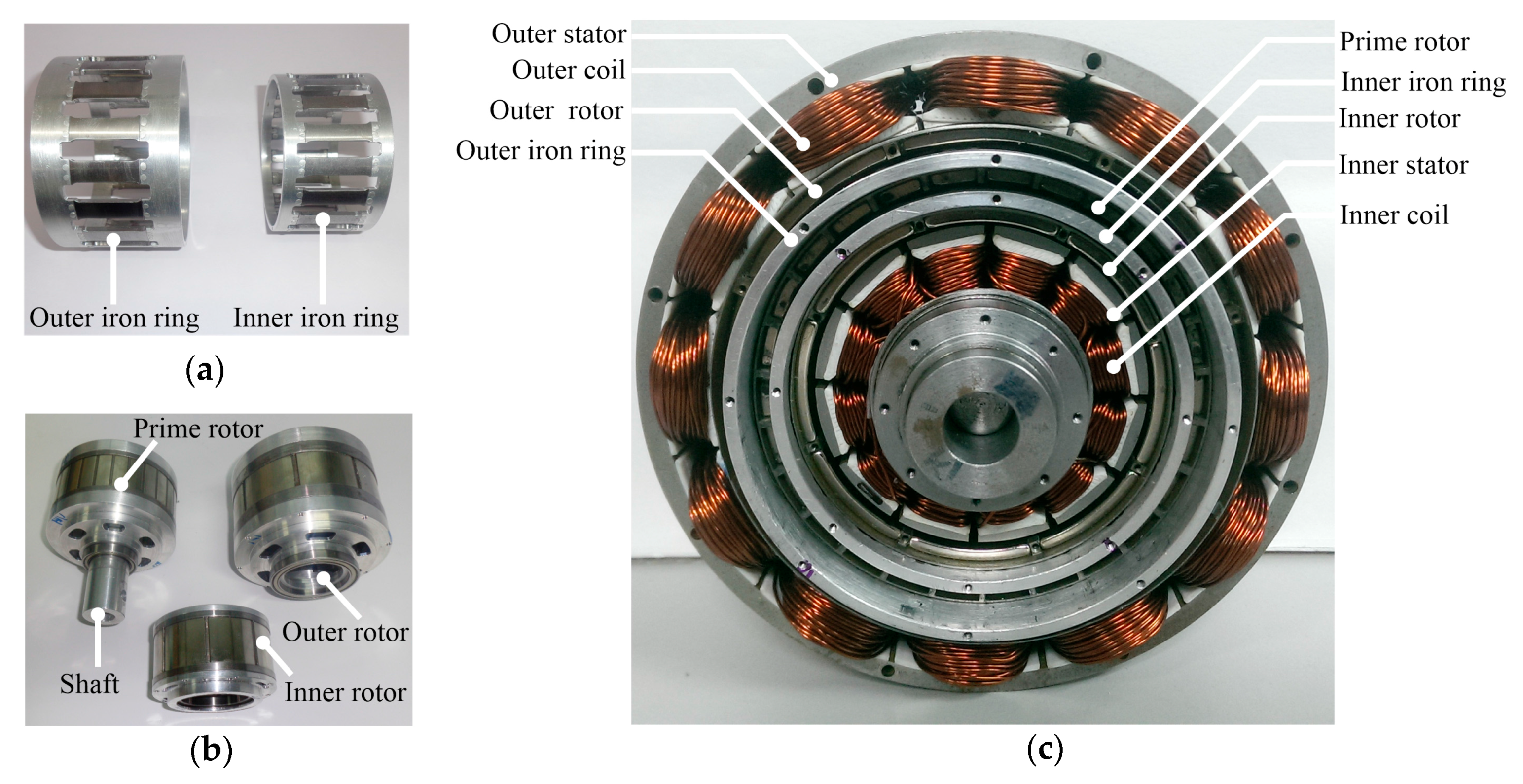
Figure 9.
The fabricated components and assembled prototype generator: (a) Iron rings; (b) PM rotors; (c) Assembled prototype.
Figure 9.
The fabricated components and assembled prototype generator: (a) Iron rings; (b) PM rotors; (c) Assembled prototype.
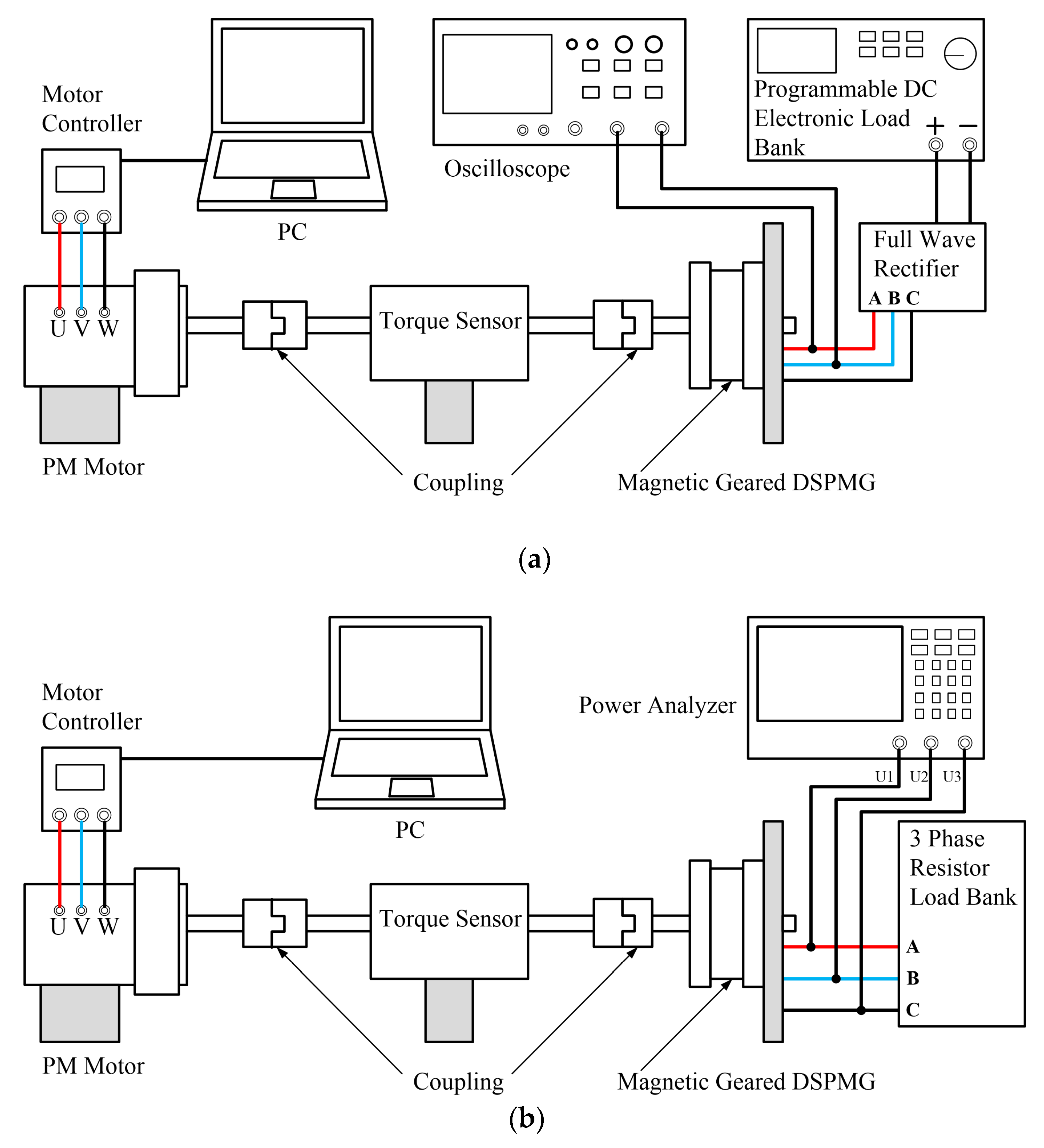
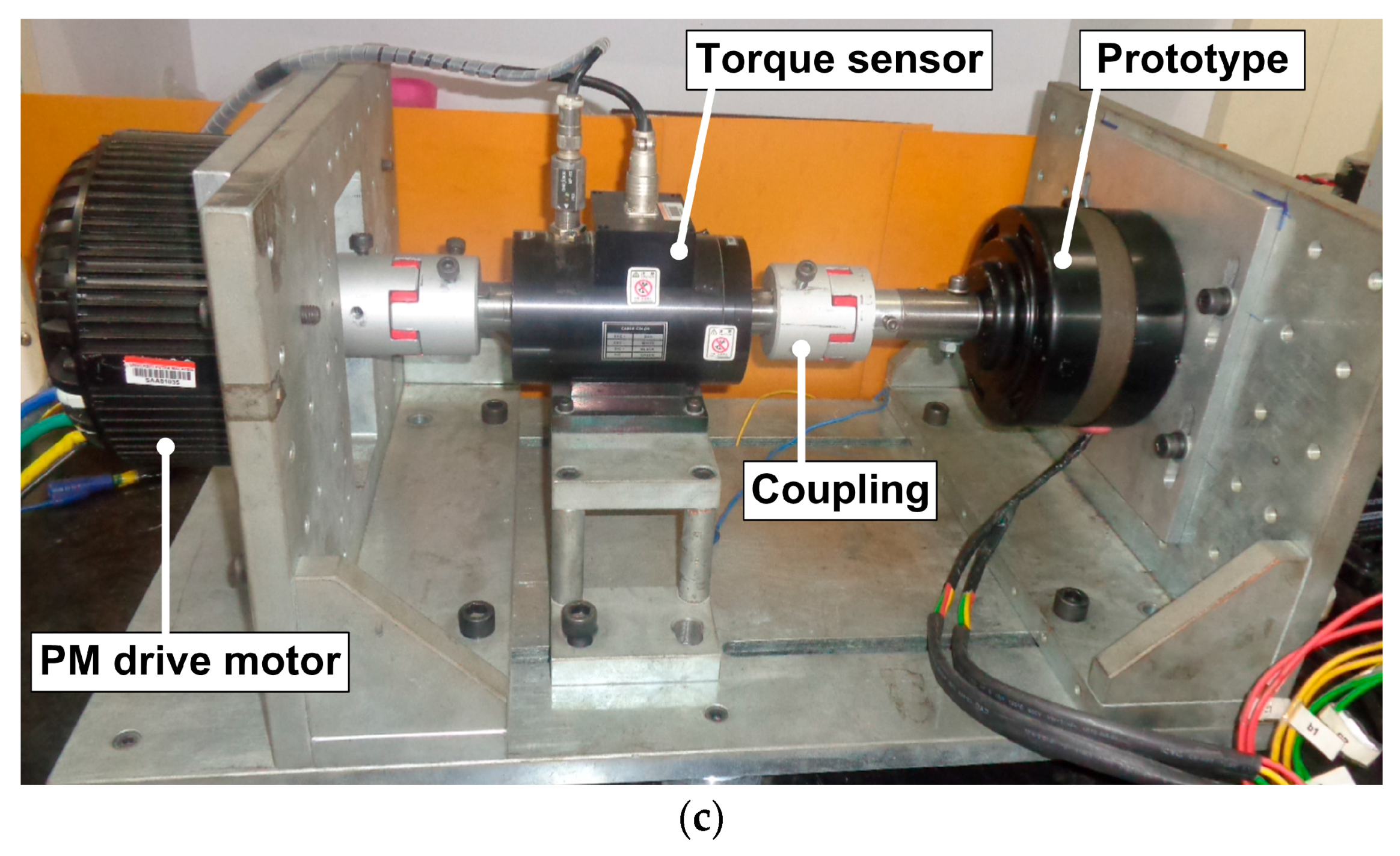
Figure 10.
Experimental setup and test rig: (a) DC power measurement configuration; (b) AC power measurement configuration; (c) Prototype in test rig.
Figure 10.
Experimental setup and test rig: (a) DC power measurement configuration; (b) AC power measurement configuration; (c) Prototype in test rig.
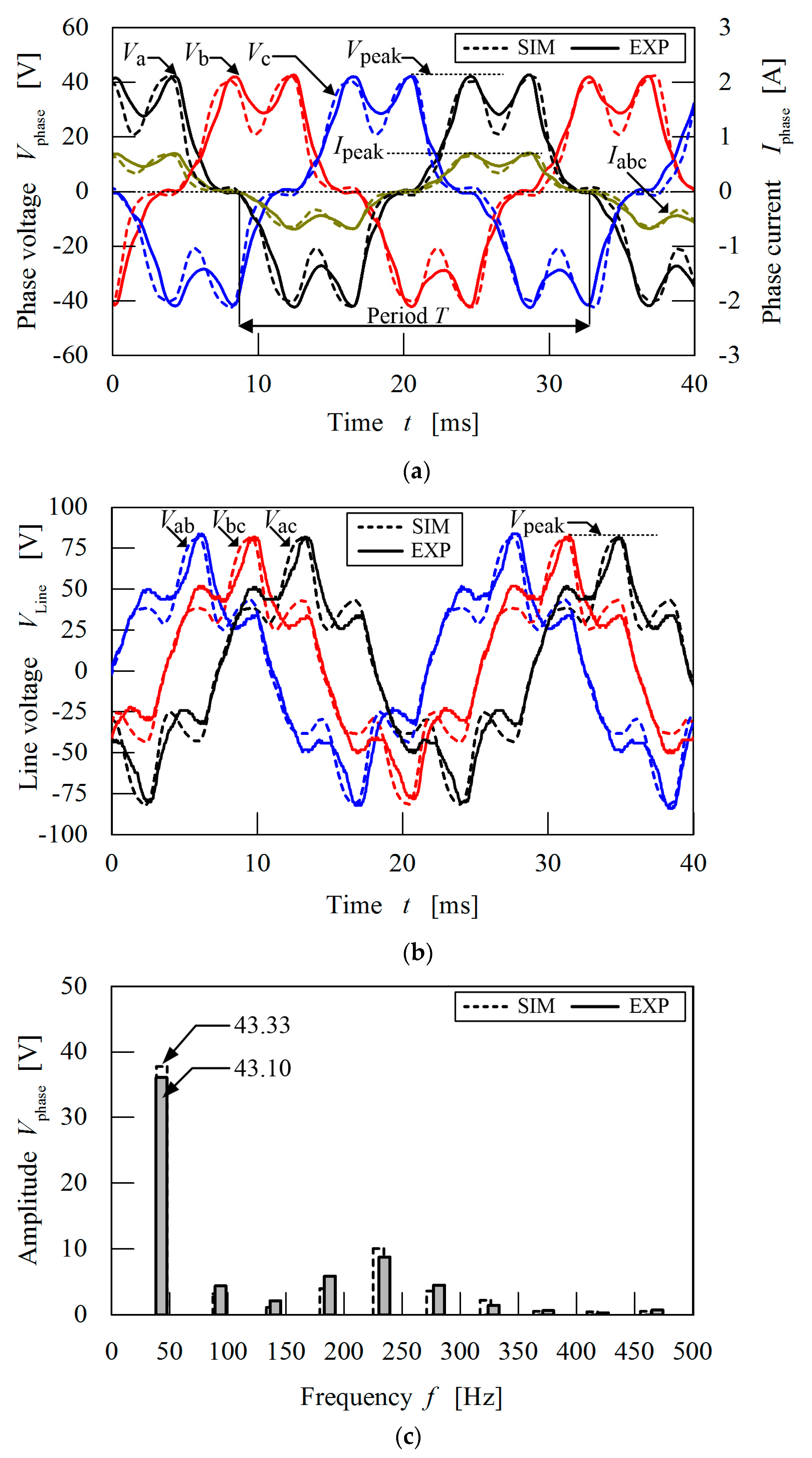
Figure 11.
Comparison of simulated and measured output three-phase voltage and current from generator with load of 62 Ω at prime rotor speed = 200 rpm: (a) Three-phase voltage and current waveforms; (b) Line voltage waveform; (c) Fast Fourier Transform of simulated and measured three-phase voltage waveform.
Figure 11.
Comparison of simulated and measured output three-phase voltage and current from generator with load of 62 Ω at prime rotor speed = 200 rpm: (a) Three-phase voltage and current waveforms; (b) Line voltage waveform; (c) Fast Fourier Transform of simulated and measured three-phase voltage waveform.
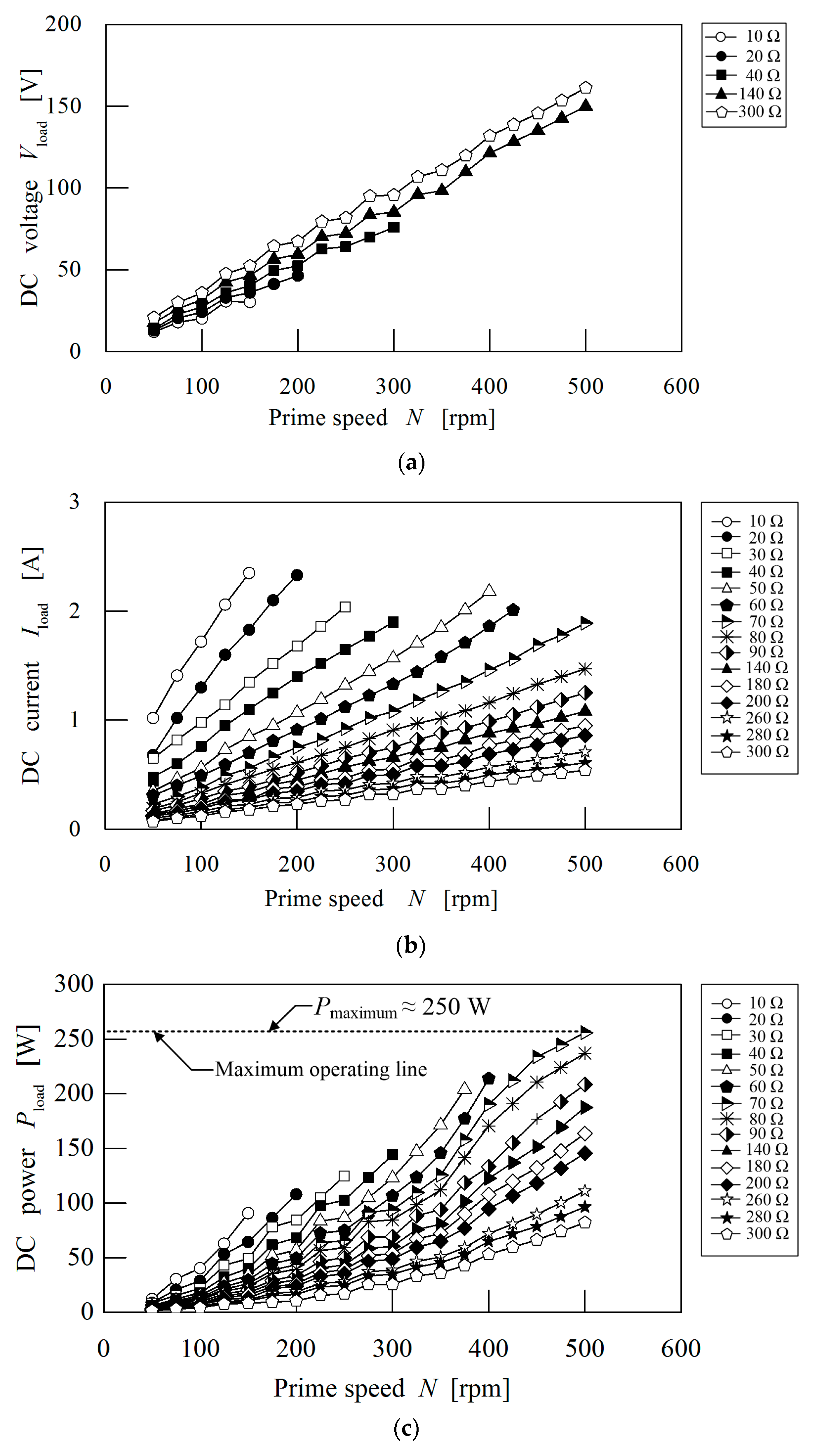
Figure 12.
Measured DC voltage/current/power vs. speed characteristics at various loads: (a) DC voltage vs. speed; (b) DC current vs. speed; (c) DC power vs. speed.
Figure 12.
Measured DC voltage/current/power vs. speed characteristics at various loads: (a) DC voltage vs. speed; (b) DC current vs. speed; (c) DC power vs. speed.
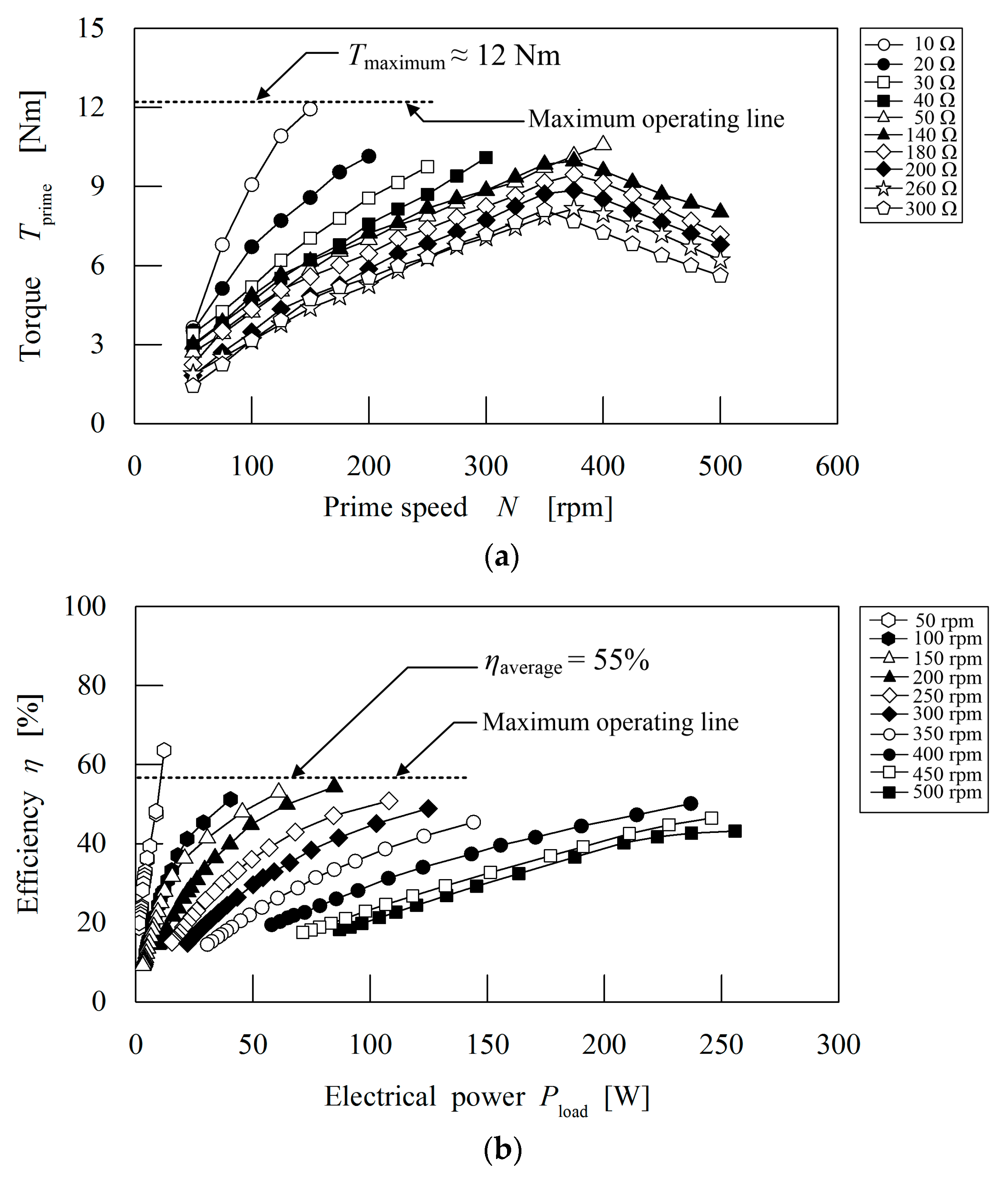
Figure 13.
Measured torque and efficiency vs. speed/electrical power characteristics at various loads: (a) Torque vs. speed; (b) Efficiency vs. electrical power.
Figure 13.
Measured torque and efficiency vs. speed/electrical power characteristics at various loads: (a) Torque vs. speed; (b) Efficiency vs. electrical power.
Figure 14.
Measured AC voltage/current/power vs. speed characteristics at various loads: (a) RMS voltage vs. speed; (b) RMS current vs. speed; (c) Active power vs. speed.
Figure 14.
Measured AC voltage/current/power vs. speed characteristics at various loads: (a) RMS voltage vs. speed; (b) RMS current vs. speed; (c) Active power vs. speed.
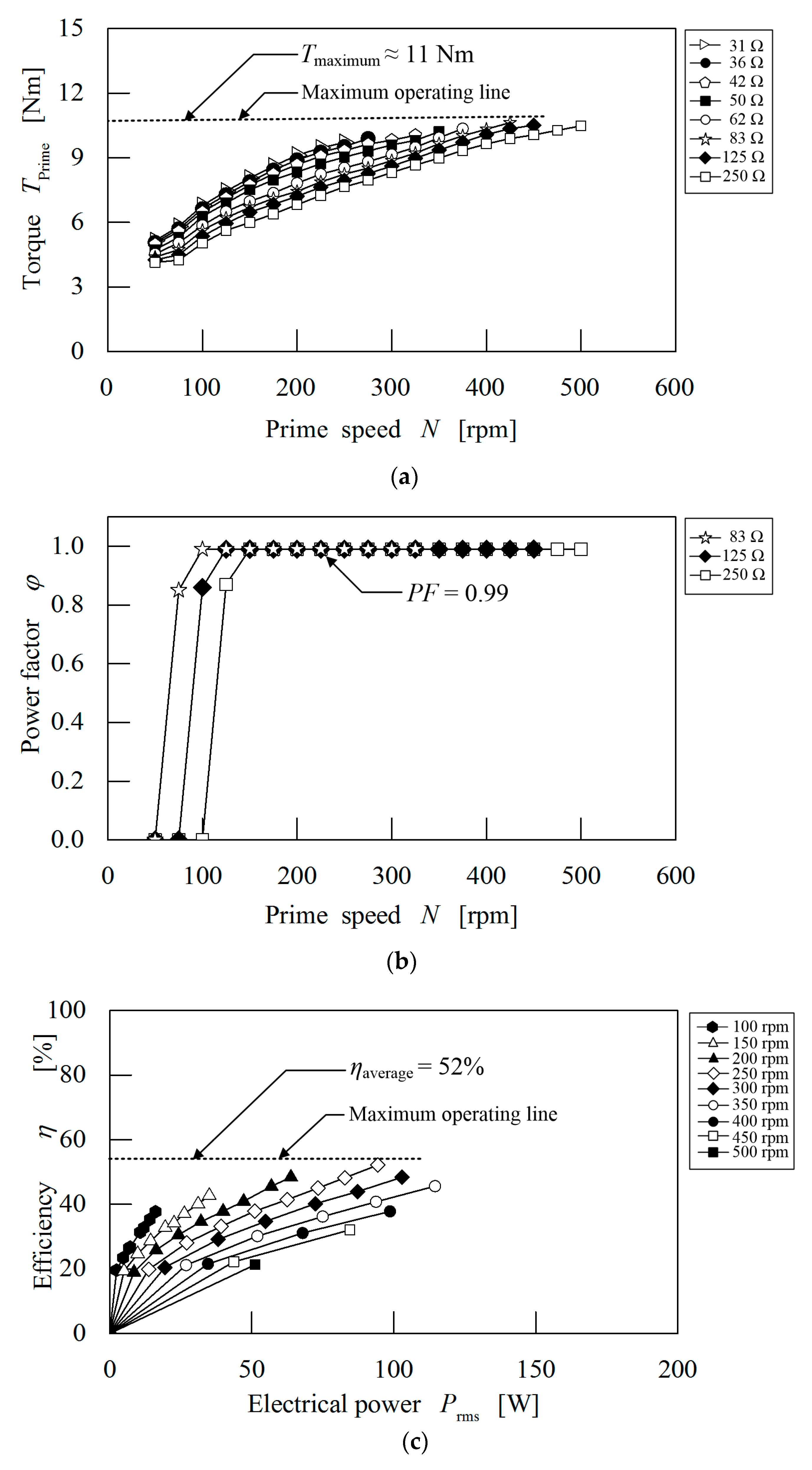
Figure 15.
Torque/Power factor/Efficiency vs. speed characteristics at various loads: (a) Torque vs. speed; (b) Power factor vs. speed; (c) Efficiency vs. electrical power.
Figure 15.
Torque/Power factor/Efficiency vs. speed characteristics at various loads: (a) Torque vs. speed; (b) Power factor vs. speed; (c) Efficiency vs. electrical power.
Table 1.
Design specifications of the proposed machine.
Table 1.
Design specifications of the proposed machine.
| Parameter | Dimension |
|---|
| Outer and inner airgap lengths | 1.0 mm |
| Outer stator outside diameter | 151.2 mm |
| Outer stator inside diameter | 116.6 mm |
| Inner stator outside diameter | 74.6 mm |
| Inner stator inside diameter | 14.0 mm |
| Axial length | 30.0 mm |
| No. of outer stator slots | 12 |
| No. of inner stator slots | 12 |
| No. of outer and inner PMs | 8 |
| No. of prime PMs | 26 |
| No. of outer and inner pole pieces | 17 |
| No. of phases | 3 |
| No. of outer stator slots per pole per phase | 1/2 |
| No. of inner stator slots per pole per phase | 1/2 |
| Cogging torque factor | 1 |
| Magnetic gear ratio | 3.25 |
Table 2.
Material properties.
Table 2.
Material properties.
| Component | Material |
|---|
| Magnets | Nd-Fe-B-38H |
| Pole pieces | SS400 |
| Rotors | SS400 |
| Stators | 50H800 Laminated steel sheet |
| Pole piece end rings | Aluminum |
Table 3.
Coil winding specifications.
Table 3.
Coil winding specifications.
| Parameter | Value |
|---|
| Diameter of wire | 0.80 mm |
| Number of turns outer coil | 75 |
| Number of turns inner coil | 31 |
| Resistance per phase outer coil | 1.70 Ω |
| Resistance per phase inner coil | 0.80 Ω |
| Phase connection | Star |
Table 4.
Outer air-gap flux density performance of the magnetic gear.
Table 4.
Outer air-gap flux density performance of the magnetic gear.
| Parameter | Value |
|---|
| Main harmonic between prime PM and outer iron ring | 4 |
| Main harmonic between outer iron ring and outer field PM | 4 |
| Main harmonic between outer field PM and outer stator | 13 |
| Calculated magnetic gear ratio | 3.25 |
| Ratio of main harmonics 4 and 13 | 3.25 |
Table 5.
Inner air-gap flux density performance of the magnetic gear.
Table 5.
Inner air-gap flux density performance of the magnetic gear.
| Parameter | Value |
|---|
| Main harmonic between inner stator and inner field PM | 4 |
| Main harmonic between inner field PM and inner iron ring | 4 |
| Main harmonic between inner iron ring and prime PM | 13 |
| Calculated magnetic gear ratio | 3.25 |
| Ratio of main harmonics 4 and 13 | 3.25 |
Table 6.
Summary of measured power characteristics for prototype magnetic geared generator.
Table 6.
Summary of measured power characteristics for prototype magnetic geared generator.
| Parameter | Value |
|---|
| Maximum output DC power | ≈250 W |
| Maximum output AC power | ≈120 W |
| Maximum torque on DC load | ≈12 Nm |
| Maximum torque on AC load | ≈11 Nm |
| Power factor | 0.99 |
Table 7.
Comparison of performance characteristics for prototype magnetic geared generator.
Table 7.
Comparison of performance characteristics for prototype magnetic geared generator.
| Parameter | Calculated | Measured |
|---|
| Maximum power efficiency | 60% | 55% |
| Prime PM rotor speed | 200 rpm | 200 rpm |
| Field PM rotor speed | 650 rpm | 646 rpm |
| Gear ratio | 3.25 | 3.23 |
| Frequency of voltage | 43.33 Hz | 43.10 Hz |
| Time period of voltage | 23.10 ms | 23.20 ms |
| Phase peak voltage | ≈42 V | ≈42 V |
| Phase peak current | 0.69 A | 0.66 A |
| Line peak voltage | ≈87 V | ≈86 V |



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}