
Presentation and Performance Evaluation of a Novel Stator-Permanent-Magnet Hybrid Stepping Motor

Abstract
:1. Introduction
2. Description of the SHSM
2.1. Structural Equivalent Transformation
2.2. Topologies and Operational Principle
- For topology 1, p must be a multiple of 4, n = p/2, and,
- For topology 2, p must be an even number and m ≥ 3, n = p, and,
2.3. Performance Superiorities
- PMs are embedded in the stator yoke, and a single-stack rotor is merely required, thus the manufacturing difficulties and costs are reduced.
- The PM magnetic circuit is located in the radial-circumferential plane, which eliminates the defects that the PM flux has to go vertically through, such as the core laminations and inter-lamination air-gaps [2]. As a result, the utilization rate of PMs and core materials is improved, which increases the output torque and power for the given current.
- The axial length of the motor can be chosen at any range since the number of core laminations has nothing to do with the utilization rate of the PMs, hence the motor’s power grade can be easily enhanced by simply increasing the core stack length.
- It is easier to realize the heat dissipation of the PMs which are embedded in the stator, such as the protection of the PMs [16].
- The PM and current magnetic field are coupled in the same radial-circumferential plane. A 2-D distribution of electromagnetic field can thus be considered for the motor design and analysis assuming a negligible end effect, which proves to be time-saving and features high accuracy.
3. Performance Comparison between HSM and SHSM
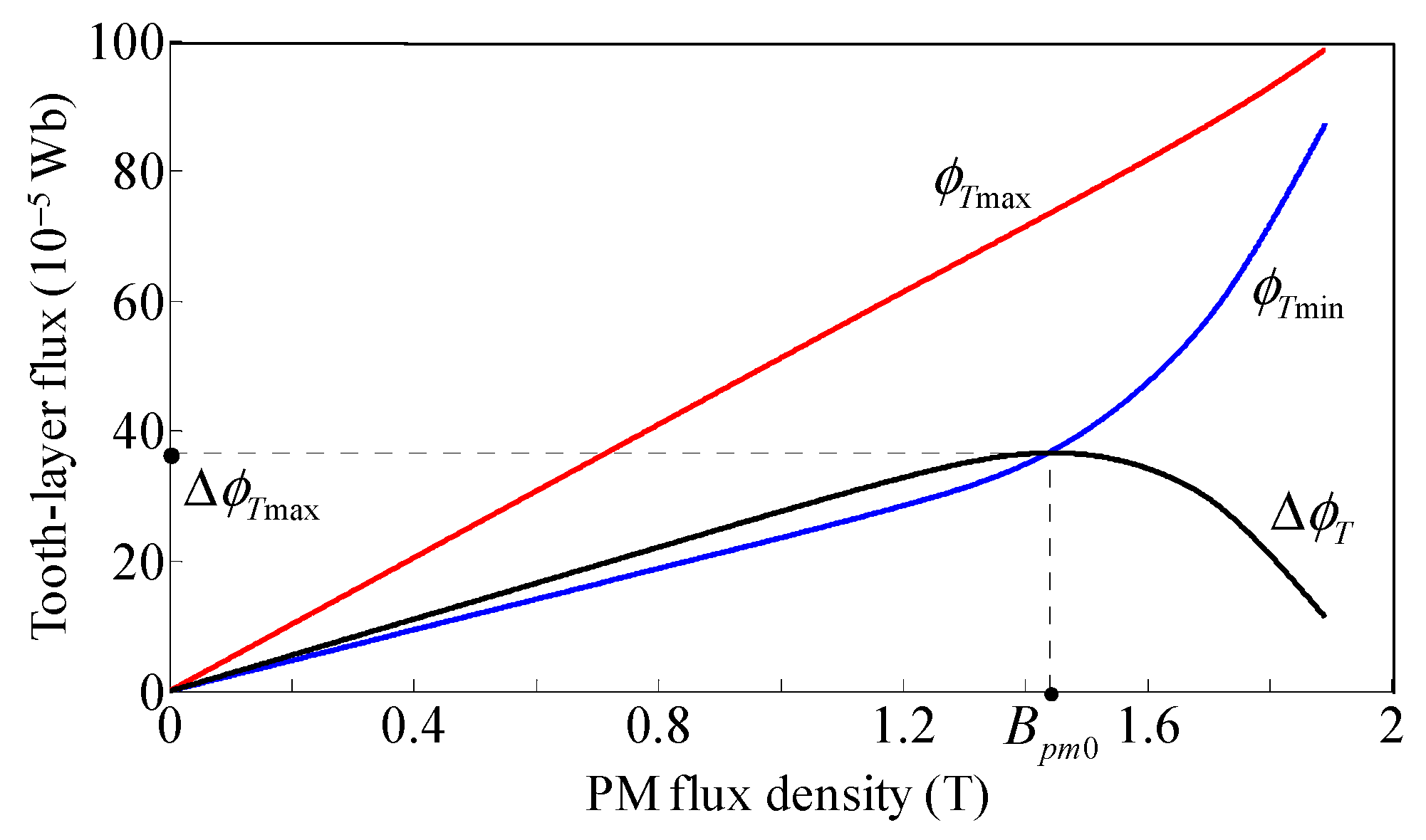
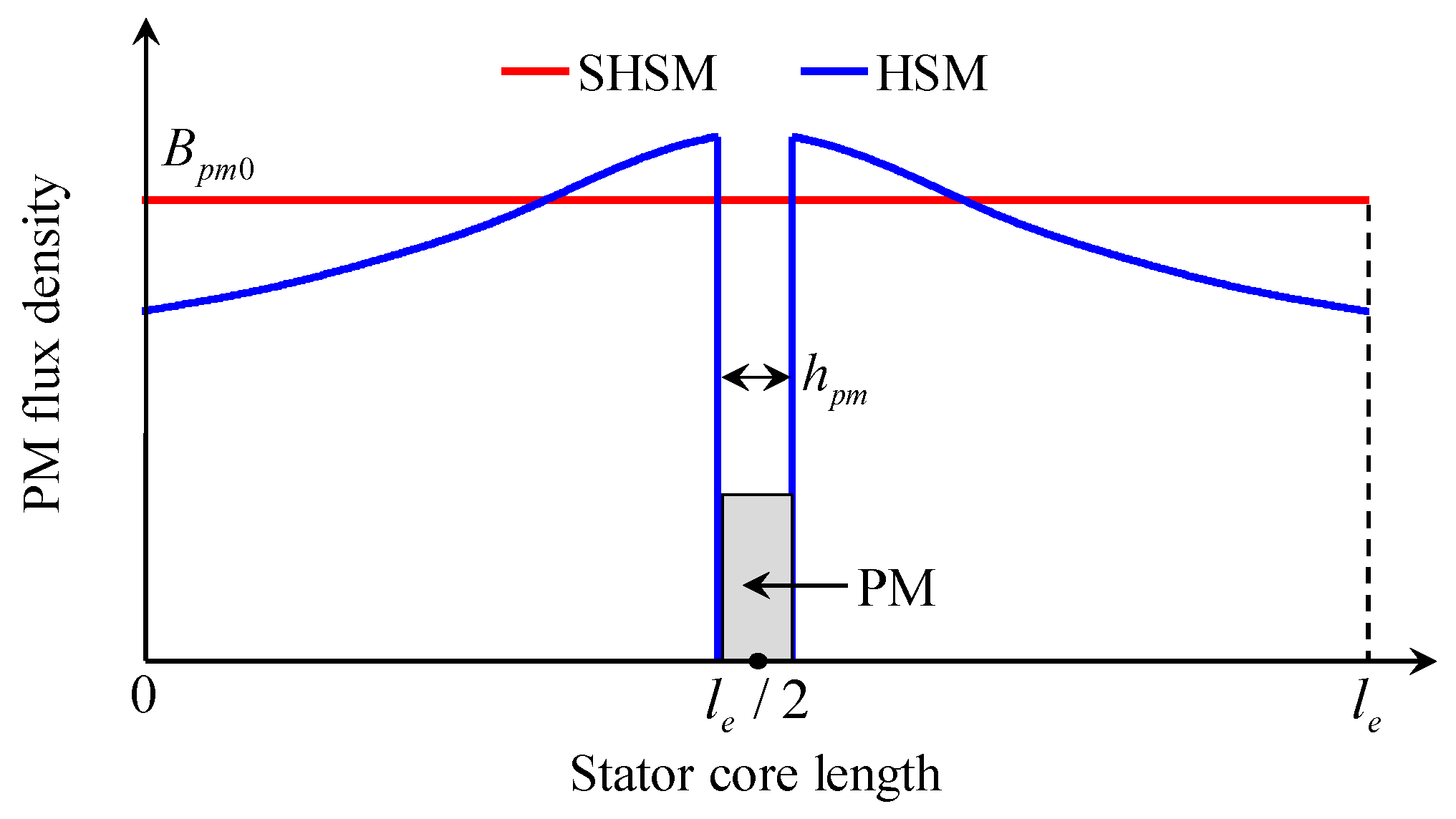
3.1. PM Flux Density
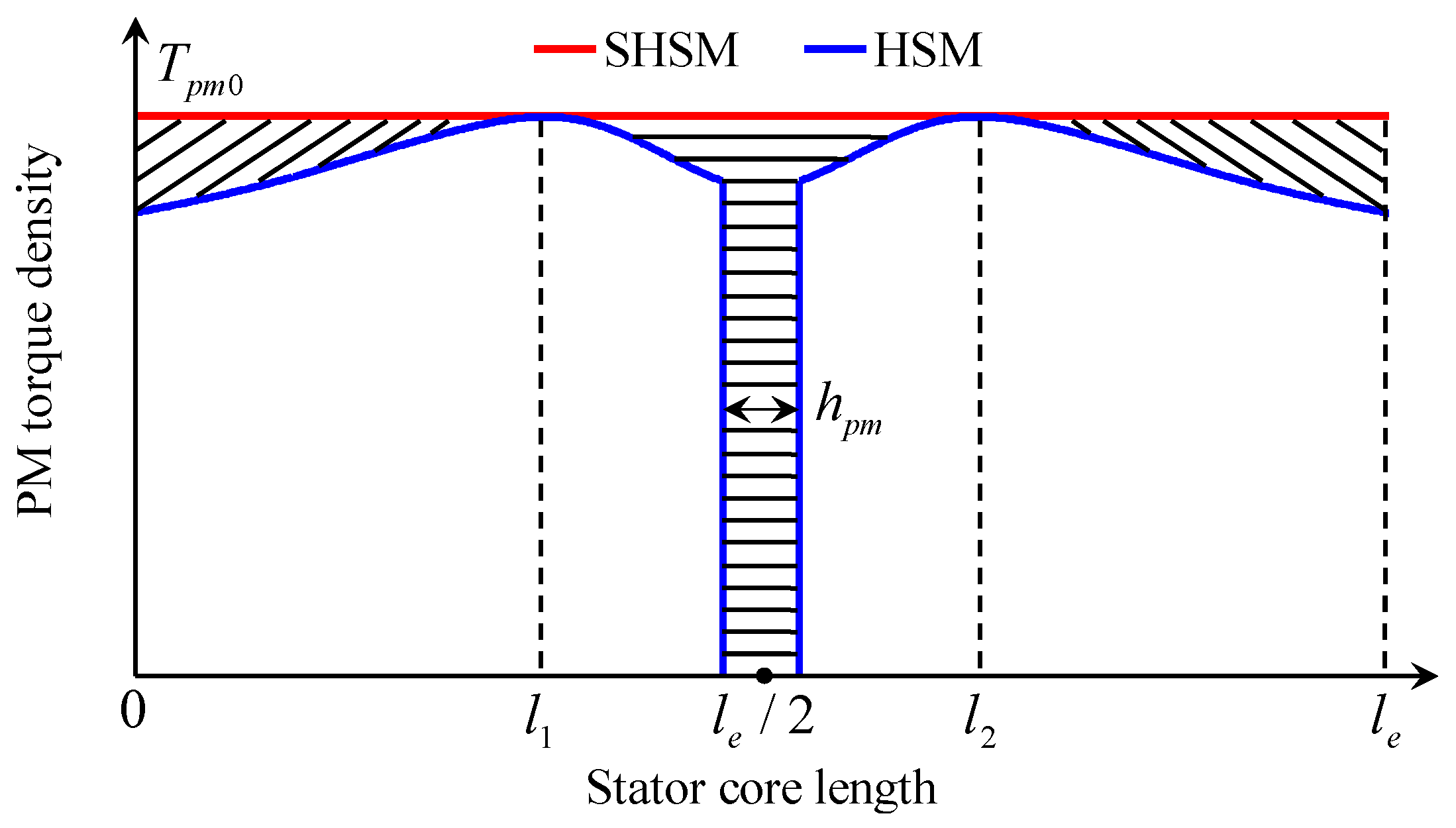
3.2. PM Torque
- le ≤ le0/2. Bpm is almost uniformly distributed in the HSM, and Spm can be suitably selected to make Bpm = Bpm0, thus the torque density ratio of the two motors is ρ = (le − hpm)/le.
- le0/2 < le ≤ le0. Bpm is non-uniformly distributed in the HSM, and Spm can be suitably selected to make the average value of Bpm equal to Bpm0, thus ρ = (le − Ss/Tpm0)/le, where Ss is the shaded area as shown in Figure 7.
- le > le0. Multiple PMs and rotor stacks can be used in the HSM to improve the torque producing capability. Supposing that Npm is the number of PMs, ρ can be determined by either case1 as ρ = (le − Npmhpm)/le when le/Npm ≤ le0/2 or case2 as ρ = (le − NpmSs/Tpm0)/le when le0/2 < le/Npm ≤ le0.
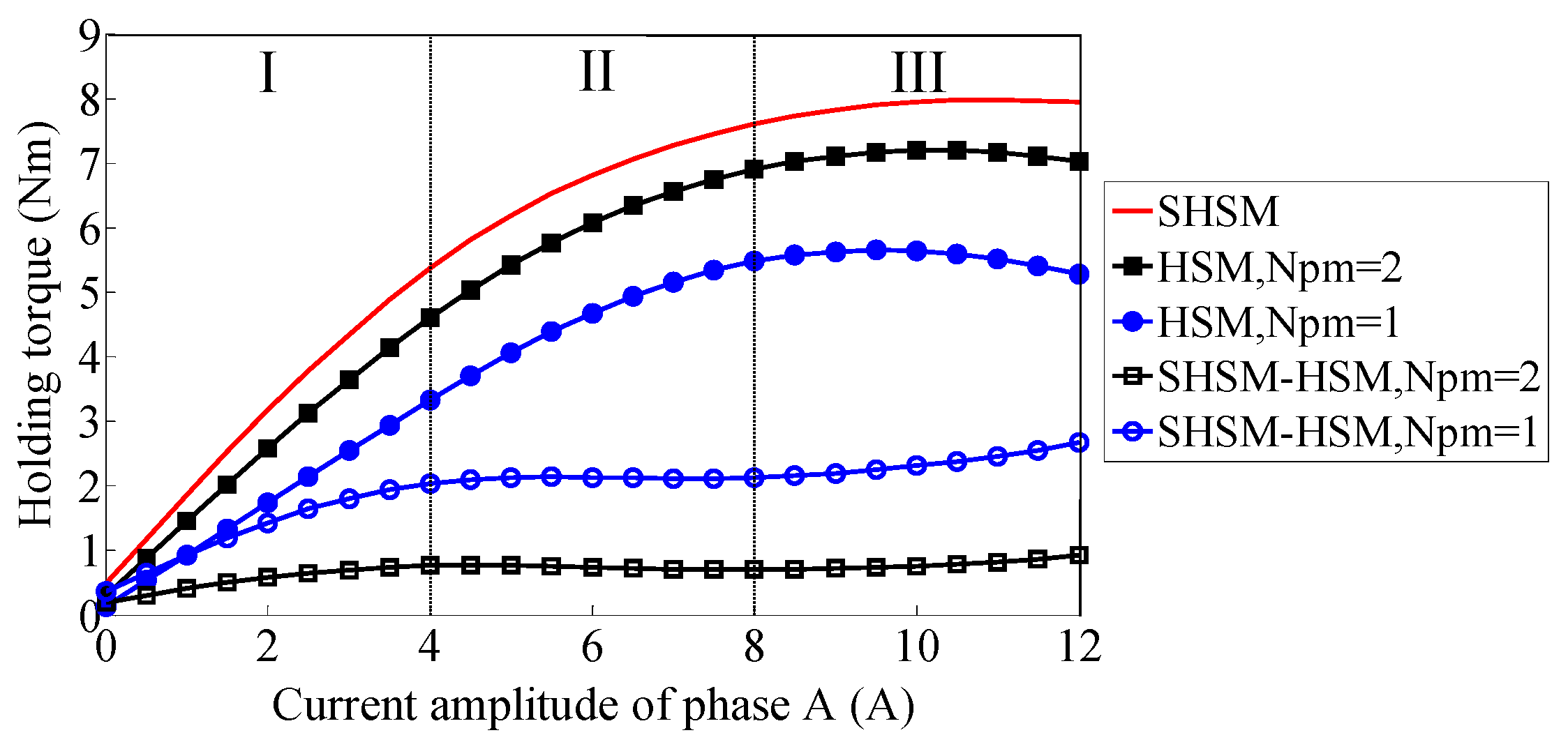
3.3. Stator Core Saturation Issue
3.4. Detent Torque and Positional Holding Accuracy
3.5. PM Grade, PM Flux Leakage, and PM Utilization Rate
4. Experimental and FEA Verification
4.1. Experiments
4.2. FEA Results
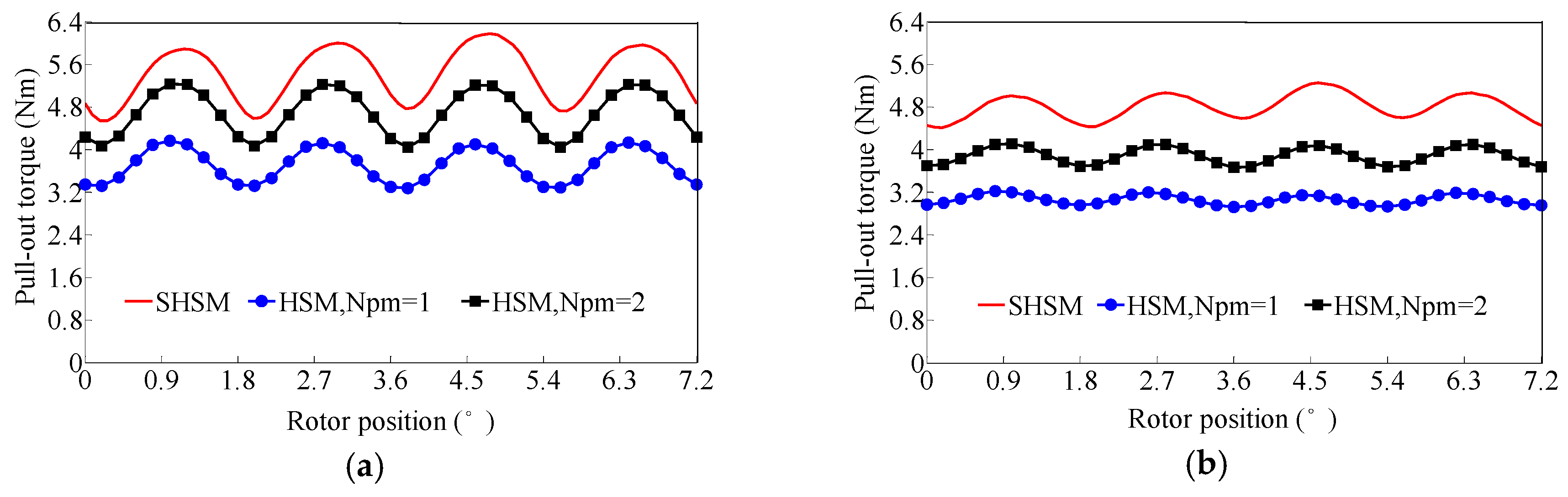
4.2.1. PM Flux Density and Pull-Out Torque
4.2.2. Stator Core Saturation and Holding Torque
4.2.3. Detent Torque and Positional Holding Accuracy
4.2.4. PM Flux Leakage and PM Utilization Rate
4.2.5. Mechanical Force Analysis
5. Conclusions
- The proposed SHSM has the same operational principle and control method as the traditional HSM, with superiorities such as simpler rotor structure, easier manufacturing and PM cooling, higher mechanical robustness, higher PM utilization rate, and higher torque, power density, and power grade.
- The proposed SHSM benefits from a 2-D distributed electromagnetic field nature, which simplifies the design, analysis, and calculations for this kind of machine with a relatively high accuracy and time-saving advantages.
- The proposed SHSM suffers from higher stator core saturation and higher detent torque and torque ripple compared with the HSM, since the total flux generated by the PMs and winding currents is distributed in the same radial-circumferential plane and is mutually superimposed, and the PM magnetic circuit is asymmetrically distributed with respect to the PMs, which may lead to a reduction of operation performance to certain extent.
- The proposed SHSM suffers from relatively lower positioning accuracy compared with the HSM, especially under the unequal-tooth-pitch situation, and therefore it is more suitable for electro-mechanical energy conversion applications rather than positioning mechanisms.
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Magnetic Circuits Solution
Appendix B. Detent Torque Calculation
References
- Umans, S.D. Fitzgerald & Kingsley's Electric Machinery, 7th ed.; McGraw-Hill: New York, NY, USA, 2013; pp. 495–503. [Google Scholar]
- Kosaka, T.; Pollock, C.; Matsui, N. 3 Dimensional finite element analysis of hybrid stepping motors taking inter-lamination gap into account. In Proceedings of the 2004 International Conference on Power Electronics, Machines & Drives (PEMD), Edinburgh, UK, 31 March–2 April 2004; pp. 534–539. [Google Scholar]
- Betin, F.; Pinchon, D.; Capolino, G.-A. Fuzzy logic applied to speed control of a stepping motor drive. IEEE Trans. Ind. Electron. 2000, 47, 610–622. [Google Scholar] [CrossRef]
- Tsui, K.W.-H.; Cheung, N.C.; Yuen, K.C.-W. Novel modeling and damping technique for hybrid stepper motor. IEEE Trans. Ind. Electron. 2009, 56, 202–211. [Google Scholar]
- Matsui, N.; Nakamura, M.; Kosaka, T. Instantaneous torque analysis of hybrid stepping motor. IEEE Trans. Ind. Appl. 1996, 32, 1176–1182. [Google Scholar] [CrossRef]
- Stuebig, C.; Ponick, B. Comparison of calculation methods for hybrid stepping motors. IEEE Trans. Ind. Appl. 2012, 48, 2182–2189. [Google Scholar] [CrossRef]
- Jenkins, M.K.; Howe, D.; Birch, T.S. An improved design produce for hybrid stepper motors. IEEE Trans. Magn. 1990, 26, 2535–2537. [Google Scholar] [CrossRef]
- De Silva, C.W. Design equations for tooth distribution of stepping motors. IEEE Trans. Ind. Electron. 1990, 37, 184–196. [Google Scholar] [CrossRef]
- Rajagopal, K.R.; Singh, B.; Singh, B.P. Optimal tooth-geometry for specific performance requirements of a hybrid stepper motor. IEEE Trans. Magn. 2003, 39, 3010–3012. [Google Scholar] [CrossRef]
- Liao, Y.; Liang, F.; Lipo, T.A. A novel permanent magnet motor with doubly salient structure. IEEE Trans. Ind. Appl. 1995, 31, 1069–1078. [Google Scholar] [CrossRef]
- Cheng, M.; Chau, K.T.; Chan, C.C. Static characteristics of a new doubly salient permanent magnet motor. IEEE Trans. Energy Convers. 2001, 16, 20–25. [Google Scholar] [CrossRef]
- Deodhar, R.P.; Andersson, S.; Boldea, I.; Miller, T.J.E. The flux reversal machine: A new brushless doubly-salient permanent-magnet machine. IEEE Trans. Ind. Appl. 1997, 33, 925–934. [Google Scholar] [CrossRef]
- More, D.S.; Fernandes, B.G. Analysis of flux-reversal machine based on fictitious electrical gear. IEEE Trans. Energy Convers. 2010, 25, 940–947. [Google Scholar] [CrossRef]
- Hua, W.; Cheng, M.; Zhang, G. A novel hybrid excitation flux-switching motor for hybrid vehicles. IEEE Trans. Magn. 2009, 45, 4728–4731. [Google Scholar] [CrossRef]
- Cao, R.; Cheng, M.; Zhang, B. Speed control of complementary and modular linear flux-switching permanent-magnet motor. IEEE Trans. Ind. Electron. 2015, 62, 4056–4064. [Google Scholar] [CrossRef]
- Cheng, M.; Hua, W.; Zhang, J.; Zhao, W. Overview of stator-permanent magnet brushless machines. IEEE Trans. Ind. Electron. 2011, 58, 5087–5101. [Google Scholar] [CrossRef]
- Zhang, J.; Cheng, M.; Chen, Z.; Hua, W. Comparison of stator-mounted permanent-magnet machines based on a general power equation. IEEE Trans. Energy Convers. 2009, 24, 826–834. [Google Scholar] [CrossRef]
- Lu, B.; Xu, Y. Presentation and analysis of a novel hybrid stepping motor with stator-permanent-magnet structure. In Proceedings of the 2015 International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 25–28 October 2015; pp. 869–875. [Google Scholar]
- Lu, B.; Xu, Y.; Ma, X. Design and analysis of a stator-permanent-magnet hybrid stepping motor. IEEE Trans. Appl. Supercond. 2016, 26, 1–5. [Google Scholar] [CrossRef]
- Sakamoto, M.; Tozune, A. High torque 2 phase hybrid type stepping motor. In Proceedings of the 2005 International Conference on Electrical Machines and Systems (ICEMS), Nanjing, China, 27–29 September 2005; pp. 630–634. [Google Scholar]
- Chau, K.T.; Sun, Q.; Fan, Y.; Cheng, M. Torque ripple minimization of doubly salient permanent-magnet motors. IEEE Trans. Energy Convers. 2005, 20, 352–358. [Google Scholar] [CrossRef]
- Freitas, M.A.A.; Andrade, D.A.; Borges, T.T. Driving the step motor with controlled phase currents. In Proceedings of the 1998 International Conference on Power Electronic Drives and Energy Systems for Industrial Growth (PEDES), Perth, Australia, 1–3 December 1998; pp. 493–498. [Google Scholar]
- Cheng, M.; Chau, K.T.; Chan, C.C. Design and analysis of a new doubly salient permanent magnet motor. IEEE Trans. Magn. 2001, 37, 3012–3020. [Google Scholar] [CrossRef]
- Zhu, X.; Cheng, M. Design, analysis and control of hybrid excited doubly salient stator-permanent- magnet motor. Sci. China Ser. E Technol. Sci. 2010, 53, 188–199. [Google Scholar] [CrossRef]
- Stuebig, C.; Ponick, B. Determination of air gap permeances of hybrid stepping motors for calculation of motor behavior. In Proceedings of the 2008 International Conference on Electrical Machines (ICEM), Vilamoura, Portugal, 6–9 September 2008; pp. 1–5. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Rated power (W) | 200 | Outer diameter of stator(mm) | 144 |
| Rated speed (r/min) | 600 | Inner diameter of stator (mm) | 63.5 |
| Rated torque (N·m) | 3.2 | Air-gap length (mm) | 0.25 |
| Rated current (A) | 3 | Stack length (mm) | 60 |
| No. of phase turns | 160 | Tooth width (mm) | 1.6 |
| No. of stator poles | 8 | Tooth height (mm) | 1.6 |
| No. of stator pole-teeth | 5 | PM dimensions (mm3) | 3 × 20 × 60 |
| No. of rotor teeth | 50 | PM material | N35SH |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, B.; Xu, Y. Presentation and Performance Evaluation of a Novel Stator-Permanent-Magnet Hybrid Stepping Motor. Energies 2017, 10, 693. https://doi.org/10.3390/en10050693
Lu B, Xu Y. Presentation and Performance Evaluation of a Novel Stator-Permanent-Magnet Hybrid Stepping Motor. Energies. 2017; 10(5):693. https://doi.org/10.3390/en10050693
Chicago/Turabian StyleLu, Binglin, and Yanliang Xu. 2017. "Presentation and Performance Evaluation of a Novel Stator-Permanent-Magnet Hybrid Stepping Motor" Energies 10, no. 5: 693. https://doi.org/10.3390/en10050693
APA StyleLu, B., & Xu, Y. (2017). Presentation and Performance Evaluation of a Novel Stator-Permanent-Magnet Hybrid Stepping Motor. Energies, 10(5), 693. https://doi.org/10.3390/en10050693