1. Introduction
In recent years, in order to improve the global greenhouse effect and carbon dioxide emissions, the use of wind power, solar power generation, biomass energy and other renewable energy sources has been expanding to maintain China’s rapid development momentum [
1,
2]. Grid installed capacity and new energy power generation has continued to grow, which effectively alleviates the pressure on economic development of coal, oil and other fossil energy dependence, contributes to the energy structure reform and the development of green energy. It is estimated that by the year 2020, the installed wind power, photovotaic and pumped storage capacity will reach 210 million kW, 110 million kW and 100 million kW, respectively. However, wind energy and solar energy are intermittent resources, which exacerbates the contradiction between the development and utilization of new energy sources. As special energy storage power supplies, wind power-pumped storage plants (PSPs) and solar power-PSPs are the most commonly used centralized and large-scale renewable energy complementary operation means [
3,
4,
5,
6,
7]. The flexibility of PSP makes up for the randomness and heterogeneity of wind power and solar power generation, which is helpful to improve the reliability of the power grid and promote the integration of renewable energy forms.
The OGVCS is an important means to solve the regulation and guarantee calculation of the pumped storage power plant, and is also the preferred method to optimize the hydraulic transient process. During the dynamic process of of PSHUs with the non-optimal closing law under extreme conditions (i.e., load rejection or pump outage), the rise of the unit rotational speed and the water hammer pressure will exceed the maximum design value, which can cause the runaway of the PSHU, abnormal vibrations or active guide vane asynchronous and other negative phenomena [
8,
9]. OGVCS plays an important role in ensuring the security and stability of the power grid, and several methods have been proposed to deal with the OGVCS problem. Based on the characteristics of the rigid water-column pressure during the transient process, [
10] proposed a two-phase guide-vane closing scheme and three-phase valve-closing schemes to control the pulsating pressures and the runaway speed problems. Reference [
11] analysed the effect of valve closure on the water-hammer pressure and laid the theoretical foundation for improving the turbine guide-vane closure. In order to avoid the operating point from being in the “S” characteristic area, Kuwabara et al. [
12] proposed a curved closing scheme that could effectively decrease the water-hammer pressure. Additionally, appropriate two-phase closing schemes [
13,
14] and misaligned guide-vane methods [
15,
16,
17] also have been applied to control the fluctuation of PSHUs. Three-phase valve-closing and curved closing schemes exert high demands on the governor servomotor, which is difficult to realize in a PSP. Meanwhile, the misaligned guide-vane method can significantly increase the pulsating pressure and the runner radial forces during the PSHU start-up process [
17]. Therefore, optimal closing schemes are required to realize optimal coordinated operation of PSP and new energy generation technologies based on a deep analysis of the operational mechanism and flow characteristics of PSHUs.
Taking into full consideration the complex hydraulic, mechanical and electrical coupling characteristics and nonlinear dynamic response process of PSHUs, a multi-objective optimization model of guide vane closing schemes is established in this paper, which includes hydraulic and mechanical multiple constraint factors. The OGVCS problem is a complex, multi-objective and multi-constraint optimization problem, which aims to reasonably and simultaneously control the rotational speed and water hammer pressure of volutes, draft tubes, surge tanks and so on. Multi-objective intelligent optimization algorithms are an effective way to solve complex multi-objective problems, and many intelligent optimization algorithms, such as particle swarm optimization (PSO), gravitational search algorithm (GSA) and so on, are widely used in solving such multi-objective optimization problems. Multi-objective particle swarm optimization (MOPSO) [
18,
19], non-dominated sorting genetic algorithm-II (NSGA-II) [
20], multi-objective differential evolution (MODE) [
21,
22], multi-objective gravitational search algorithm (MOGSA) [
23,
24] and multi-objective bee colony optimization algorithm (MOBCO) [
25,
26], have all been proposed to solve complex multi-objective optimization problems with practical and efficient modeling of coupling constraints. However, premature minimization phenomena and local convergence are still common obstacles to the performance of these stochastic searching algorithms. The so-called bacterial-foraging chemotaxis gravitational search algorithm (BCGSA) is enhanced by Pbest-Gbest-guided movement, adaptive elastic-ball method and the chemotaxis operator strategy of the bacterial-foraging algorithm [
27]. The global exploration and local exploitation performance of BCGSA have been proved in [
27]. Inspired by the NSGA-II, EMOBCGSA has been introduced to deal with the OGVCS by reconstructing the optimal structure and method. Finally, cases of complex extreme operating conditions of ‘single tube-double unit’-type PSHU systems are studied to verify the feasibility and effectiveness of the proposed EMOBCGSA in solving OGVCS problems.
The remainder of this paper is organized as follows.
Section 2 introduces numerical calculation modeling of a “single tube-double unit”-type PSHU system.
Section 3 establishes a multi-objective optimization model of guide vane closing schemes and multiple constraints are introduced simultaneously.
Section 4 delineates the general procedure and multi-objective improvements in BCGSA.
Section 5 illustrates the practical solving procedure for OGVCS problems and experimental results, along with a few discussions, respectively. The conclusions are summarized in
Section 6.
2. Numerical Calculation Model of the Pumped Storage Hydro Unit System
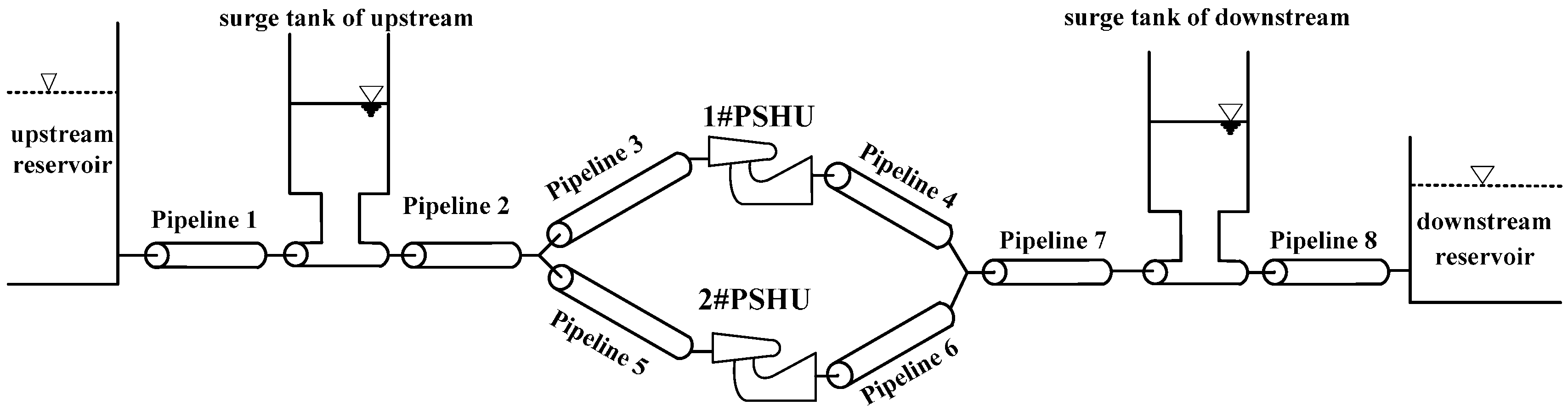
The “single tube-double unit”-type PSHU system is a typical kind of power generation system that couples hydraulic, mechanical and electrical factors, simplified mainly into four parts, namely reservoir, pressure water pipeline, surge tank and pumped storage hydro unit.
Figure 1 shows a schematic diagram of the “single tube-double units”-type PSHU system used in this paper, where the PSHU system is divided into upstream and downstream reservoirs, eight pressure water pipelines, upstream and downstream surge tanks, and two PSHUs. In this section, mathematical models of each link are described.
2.1. Model of Pressure Water Pipeline
The well-known characteristics method is employed in the modeling of pressure water pipelines. The basic motion equation and continuous unsteady flow equation in a pressure pipeline can be expressed by Equations (1) and (2) [
28]. Equations (1) and (2) can be solved using the method of characteristics, which transforms the formulas into a simplified equation set in the range of the characteristic line
. The simplified equation set is described as by Equations (3) and (4):
where
is the flow velocity,
is the piezometric head,
a is the water hammer velocity,
is the friction coefficient,
is the pipeline diameter,
is the angle between the line and a horizontal surface of each section of the pipeline center,
and
are functions of the pipe length
and time
, respectively,
is the pipe section area, and
is the water flow in the pipe section.
The difference network is constructed using the above simplified equation set, then the finite difference method is used to solve the problem.
Figure 2 shows the characteristic line difference mesh. For
Figure 2, the length of
pipeline is divided into
segments, and the length of each segment is
, while the time step of the differential network is
.
Diagonal
satisfies the condition
and diagonal
satisfies the condition
. Equations (5) and (6) are the integral of motion equation between
A and
P and the integral of continuous equation between
B and
P, respectively:
Finally, the correct processing and analog computation of boundary conditions for the PSHU system in the transient process of the research and control are very important. The boundary conditions are a conduit or a connected terminal, including upstream reservoir, upstream surge tank, series nodes, bifurcated pipe nodes, ball valve, PSHU, downstream surge tank and downstream reservoir. Besides the surge tank and PSHU, the other boundary conditions as well as the spiral case and tail pipe usually can be considered as pressure water pipelines.
2.2. Surge Tank Model
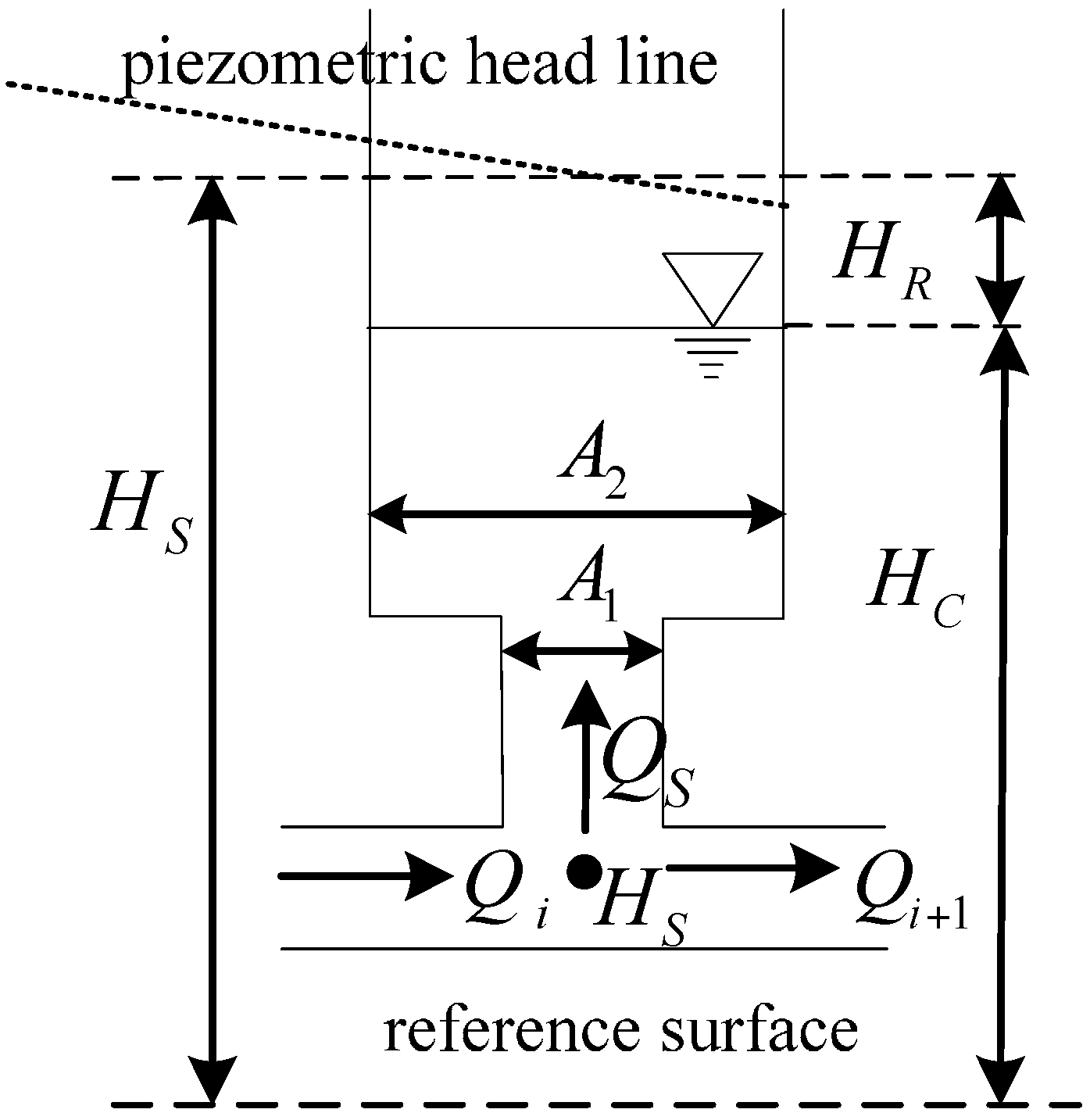
There are many types of surge tanks in the built pumped storage power stations, including impedance type, differential type and air cushion type. Based on the actual situation of pumped storage power stations in China, the impedance surge tank is adopted by the PSHU system in this paper. The schematic diagram of the impedance surge tank is shown in
Figure 3, from which the impedance surge tank is connected with the water pipeline system through a small impedance orifice, which has the advantages of small volume and simple structure. The corresponding basic equations can be described by Equation (7) [
29,
30,
31]:
where
,
are the surge tank bottom pressure and flow,
is the area of the impedance orifice,
,
are the elevation and area of the surge tank,
is the bottom orifice flow loss coefficient.
2.3. Pumped Storage Hydro Unit Model
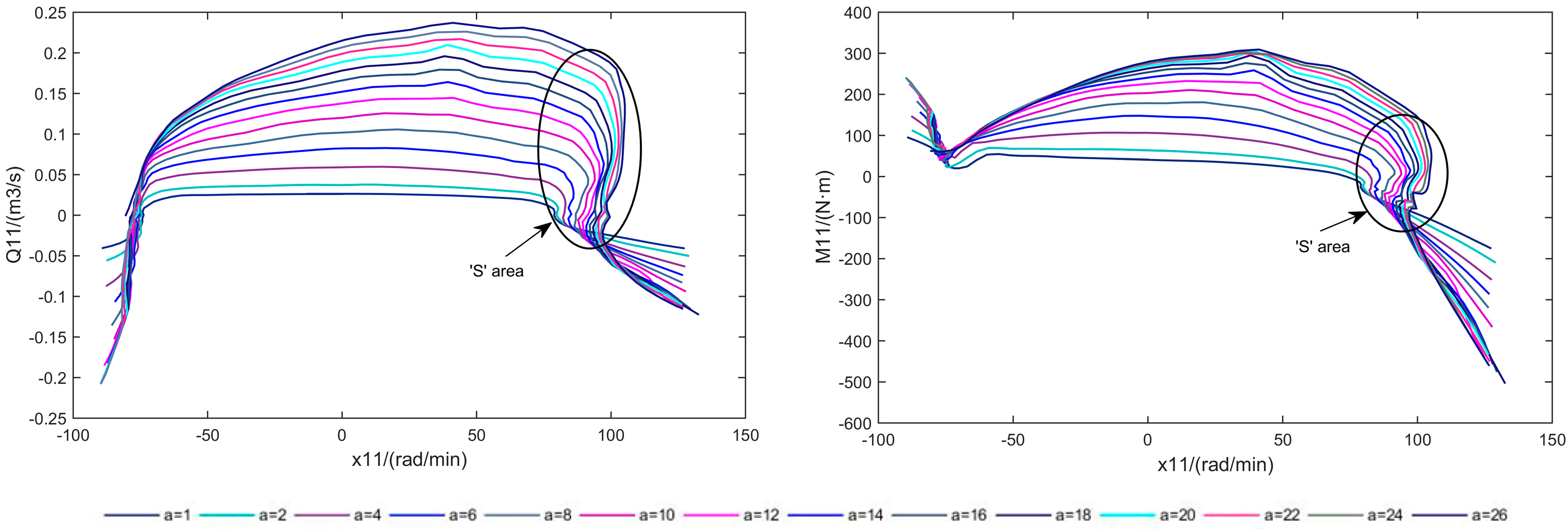
The PSHU is composed of a pump-turbine and generator, which are the key components of a PSHU system. At present, pump-turbine modeling based on the characteristic curves has been widely used. In this paper, the pump-turbine is expressed with the torque function and flow function for state variables, including guide vane opening, generator rotational speed and water head, shown as Equation (8) [
32]. The analytic expressions of the nonlinear functions of
and
are difficult to obtain, however, based on the characteristic curves (
Figure 4), torque and flow of the pump-turbine at a certain time can be calculated by means of interpolation or nonlinear function fitting. In order to overcome the obstacle of single input-multiple output during the interpolation calculation process, the logarithmic-curve-projection method is adopted for the mathematical transformation of the characteristic curves [
33]:
where
and
indicate the torque and flow of the pump-turbine, respectively.
In this paper, only the PSHU rotational speed change of standalone running in the isolated power grid is considered [
34]. The dynamic equation of the synchronous generator considering the load characteristics is simplified to give Equation (9):
where
is the generator rotational speed,
is the inertial time constant of the generator,
is the adjusting coefficient of the generator, and
is the load disturbance which represents the load changes.
3. Optimization of Guide Vane Closing Schemes Problem Formulation
The dynamic response characteristics of the unit and the hydraulic influence of the large fluctuation condition of the PSHU are analyzed under the conditions of different guide vane closing laws. Considering the increase of unit rotational speed and pressure of each node in the hydraulic unit as the two objectives, the optimal model of the guide vane closing law is established.
3.1. Objective Function
3.1.1. Rotational Speed Objective
The rise of the rotational speed is one of the main characteristics of the pumped storage units under load rejection or pump power off conditions. Under load rejection conditions, a non-optimal guide vane closure law will lead to the runaway phenomenon, causing mechanical damage, vibrations and noise in the PSHU. The minimize rotational speed objective
of the OGVCS problem can be expressed as follows:
where
is the number of units in a hydraulic unit,
is the rotational speed of
unit during the transition process,
is the rated rotational speed of the unit under stable conditions.
3.1.2. Water Hammer Pressure Objective
In order to minimize the pressure of each hydraulic unit, comprehensively considering the volute end pressure, tail pipe inlet pressure and surge tank water level value, the water hammer pressure objective function
is established as follows:
where
,
are the maximum value of the volute end pressure and tail pipe inlet pressure for
unit,
,
are the maximum water level of the upstream surge tank and downstream surge tank,
,
are the weight coefficients of the water hammer pressure and water level in the surge tank.
3.2. Multiple Constraints
The OGVCS problem should satisfy the following equality and inequality constraints:
(1) Rising rotational speed constraint
To guarantee regulation calculation and transient analysis of a PSHU system, there is a clear maximum constraint value
for the rise value of rotational speed in all kinds of extreme cases:
(2) Limit of rotational speed fluctuation
In this paper, the limit of the times of rotational speed fluctuation is introduced in order to achieve a good dynamic quality of the large fluctuation condition process:
where
is the rising rate constant for dynamic quality requirements,
is the number of fluctuations, and
is constraint constant of the number of fluctuations.
(3) Volute pressure constraint
The maximum corrected value and the pressure constraint of the volute inlet pressure considering the pressure fluctuation and the calculation error are described as follows:
where
,
and
are the maximum calculated value, initial value and maximum corrected value of the volute inlet pressure for
unit,
is the net head, and
is the constraint constant of
.
(4) Draft tube inlet pressure constraint
where
,
and
are minimum calculated value, initial value and minimum corrected value of the draft tube inlet pressure for
unit.
(5) The surge water level limits
where
and
are the maximum and minimum values of the surge water level of the upstream surge tank,
and
are maximum and minimum values of the surge water level of the downstream surge tank, and the other terms are the corresponding constraint constants.
(6) Speed governor oil velocity limit
If the guide vanes are closed within a short time, the control accuracy of the governor curve slope has higher requirements. In order to meet such a short closing time demand, the servomotor oil speed must be large enough, which can cause major safety issues. Therefore, this paper takes into account the limiting factor of the slope control of the governor and transforms it into the guide vane closing rate:
where
and
are change value and rated maximum value guide vane opening,
is the guide vane closing time, and
is the minimum closing time limit.
6. Conclusions
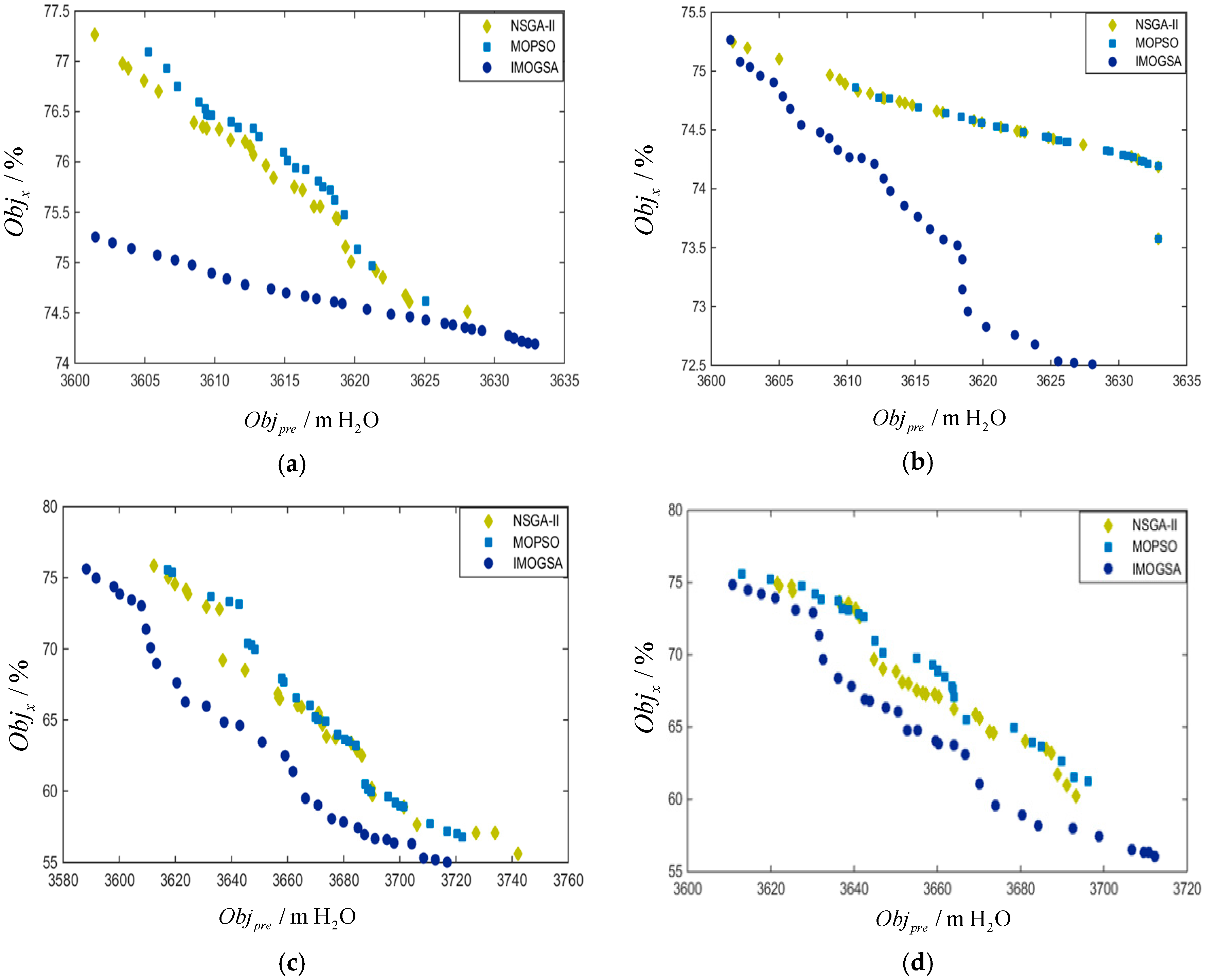
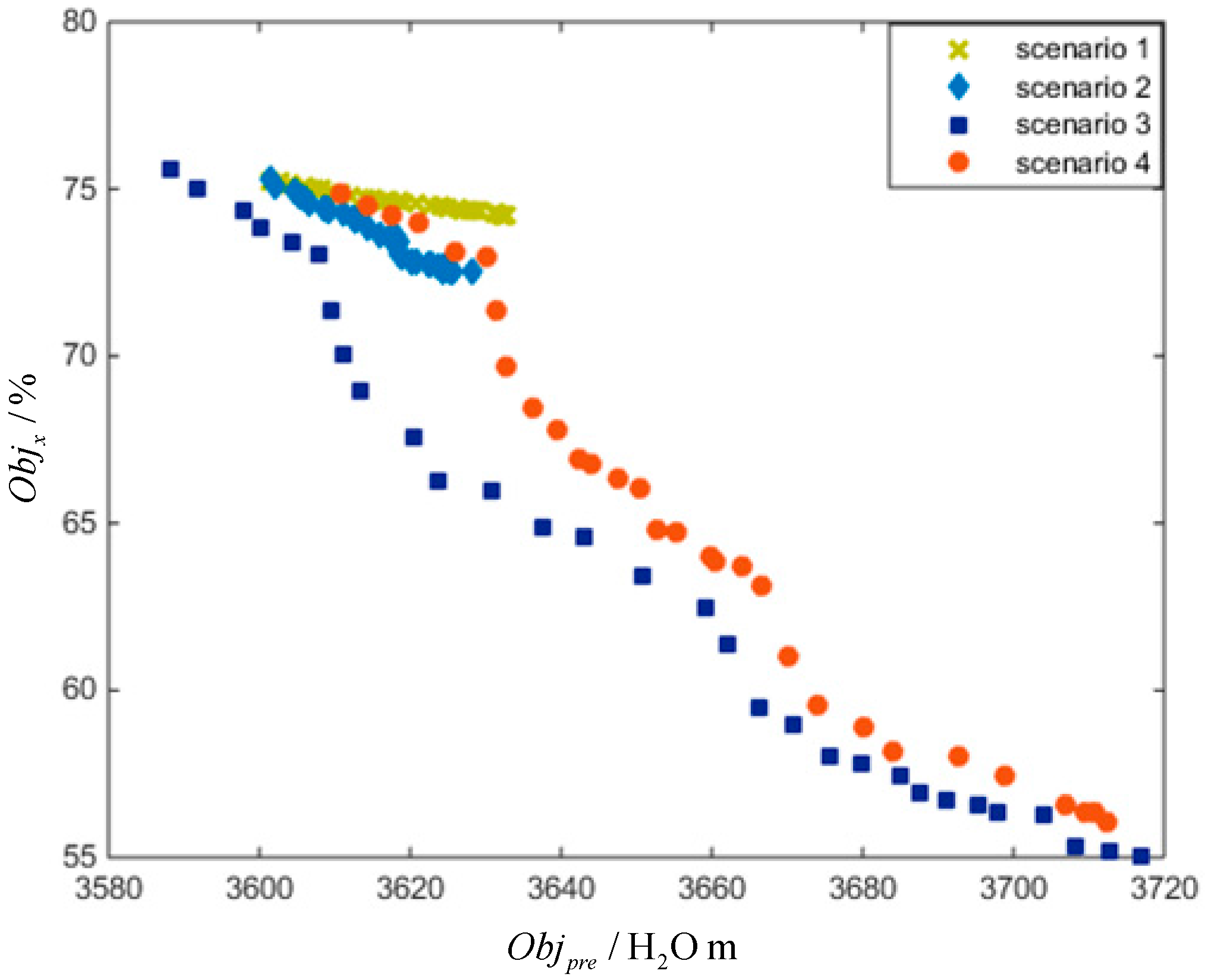
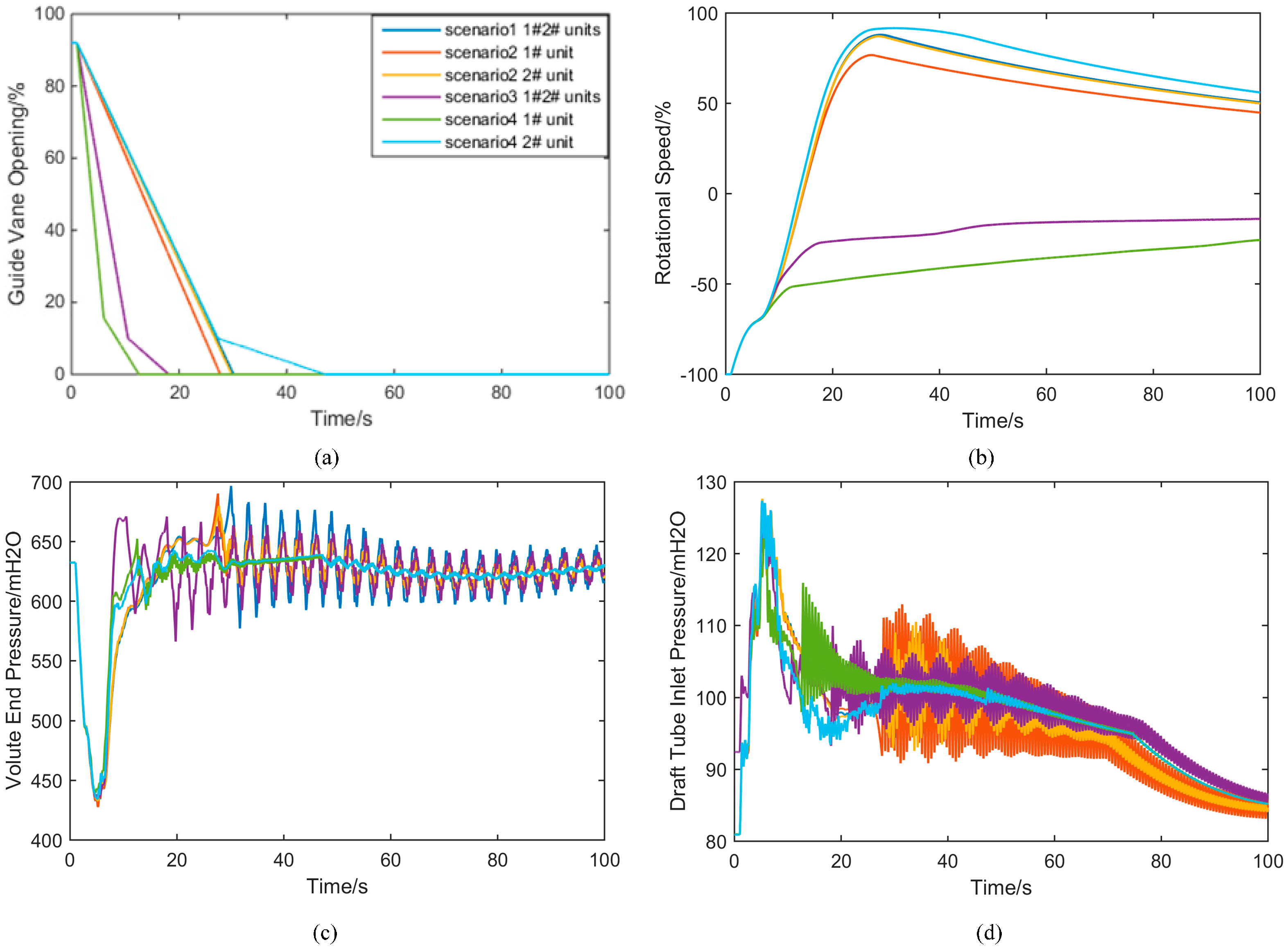
In this paper, an EMOBCGSA method is proposed to solve the OGVCS problem considering the various hydraulic and mechanical constraints. The significant innovations of the proposed method are mainly focused on the following three aspects: (1) based on a numerical calculation model of the PSHU system, a multi-objective optimization model is established, which includes hydraulic and mechanical multiple factors; (2) to improve the convergence speed and ergodicity of the algorithm, the novel population reconstruction strategy, multi-objective adaptive chemotaxis operation and velocity update method, and EAS update and maintenance strategy is introduced to improve the standard BCGSA; (3) heuristic constraint-handling strategy with elimination and local search based on violation ranking is proposed to handle the various constraints of OGVCS problems instead of the traditional penalty function, which can improve the computing efficiency. Finally, to verify the feasibility and effectiveness of the proposed EMOBCGSA method, the ‘single tube-double unit’-type PSHU system model based on actual parameters of one PSP is established and Pareto non-inferior solutions under load rejection and pump outage conditiona in different scenarios are obtained. The comparison and analysis of the optimization results achieved by EMOBCGSA and othes algorithms indicate that the proposed method can obtain better schemes with better Objpre and Objx, and the Pareto optimal solutions of EMOBCGSA possess a preferable quality and better distribution.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}