Generic Type 3 Wind Turbine Model Based on IEC 61400-27-1: Parameter Analysis and Transient Response under Voltage Dips

 ,
,  and
and
Abstract
:1. Introduction
2. IEC 61400-27-1 Type 3 Wind Turbine Model
2.1. MATLAB/Simulink Implementation of the Type 3 WT Model
2.2. Simulations Conducted for the Parameter and Transient Response Analysis
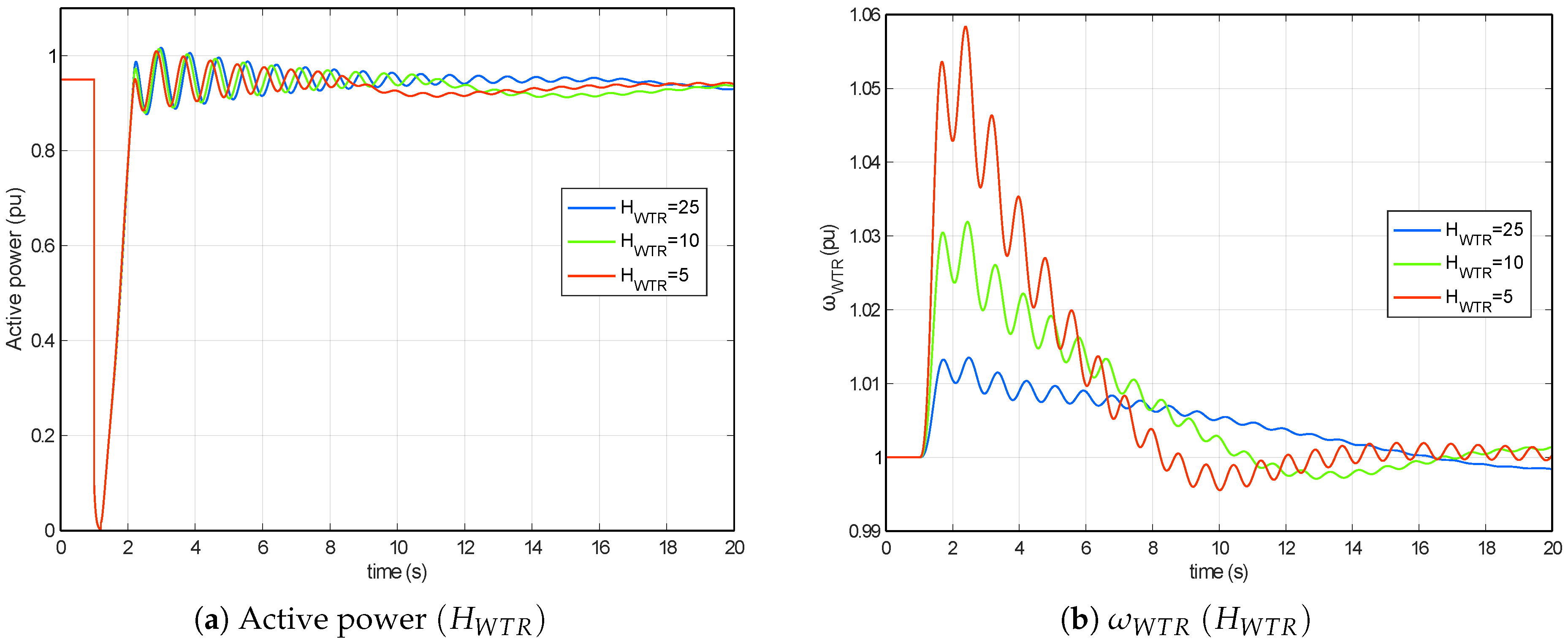
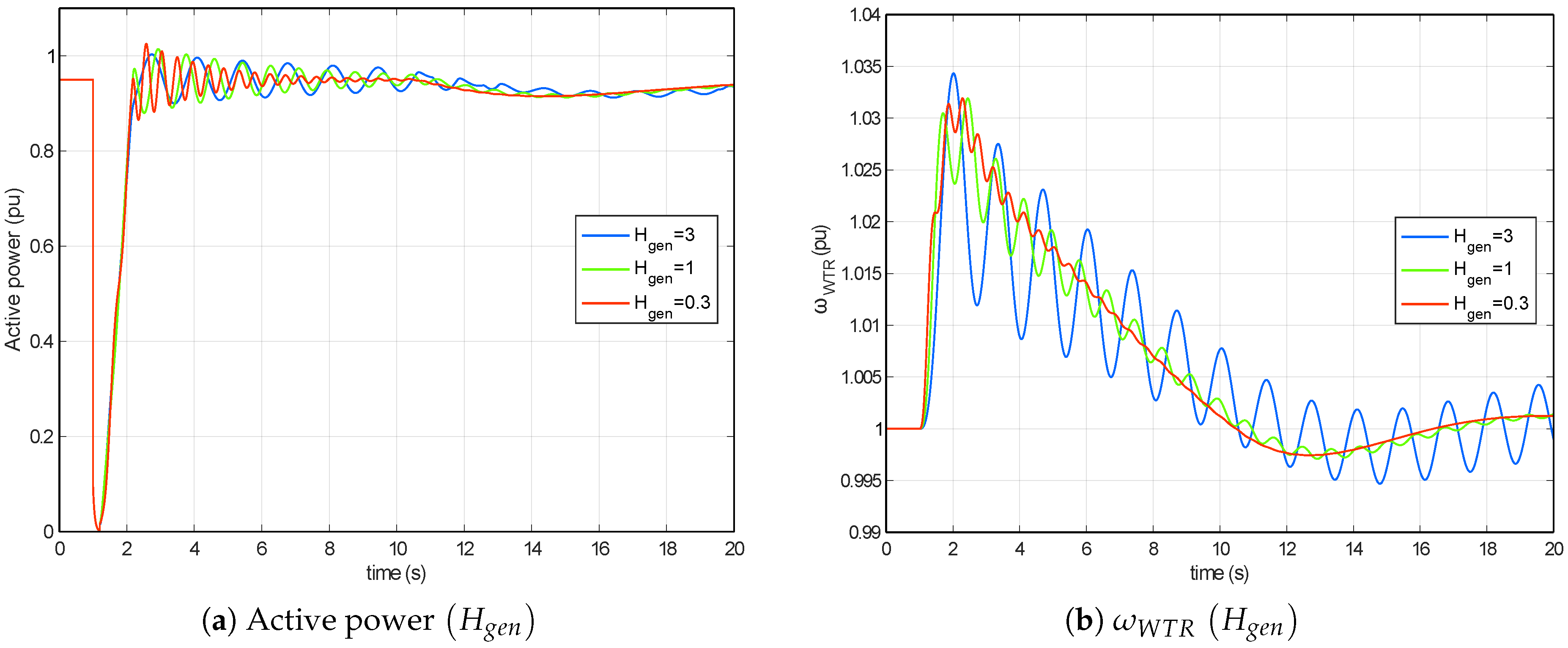
3. Mechanical Parameter Analysis under Voltage Dips of the Type 3 WT Model
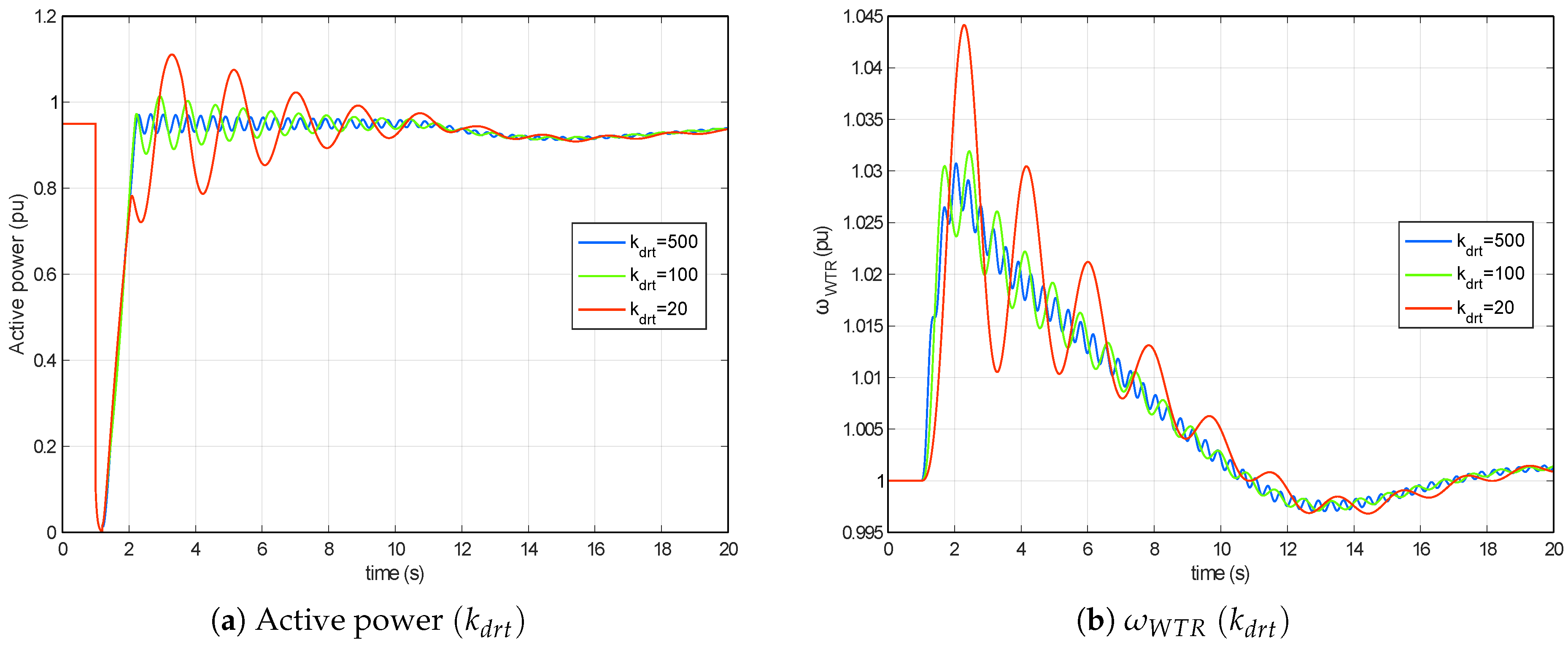
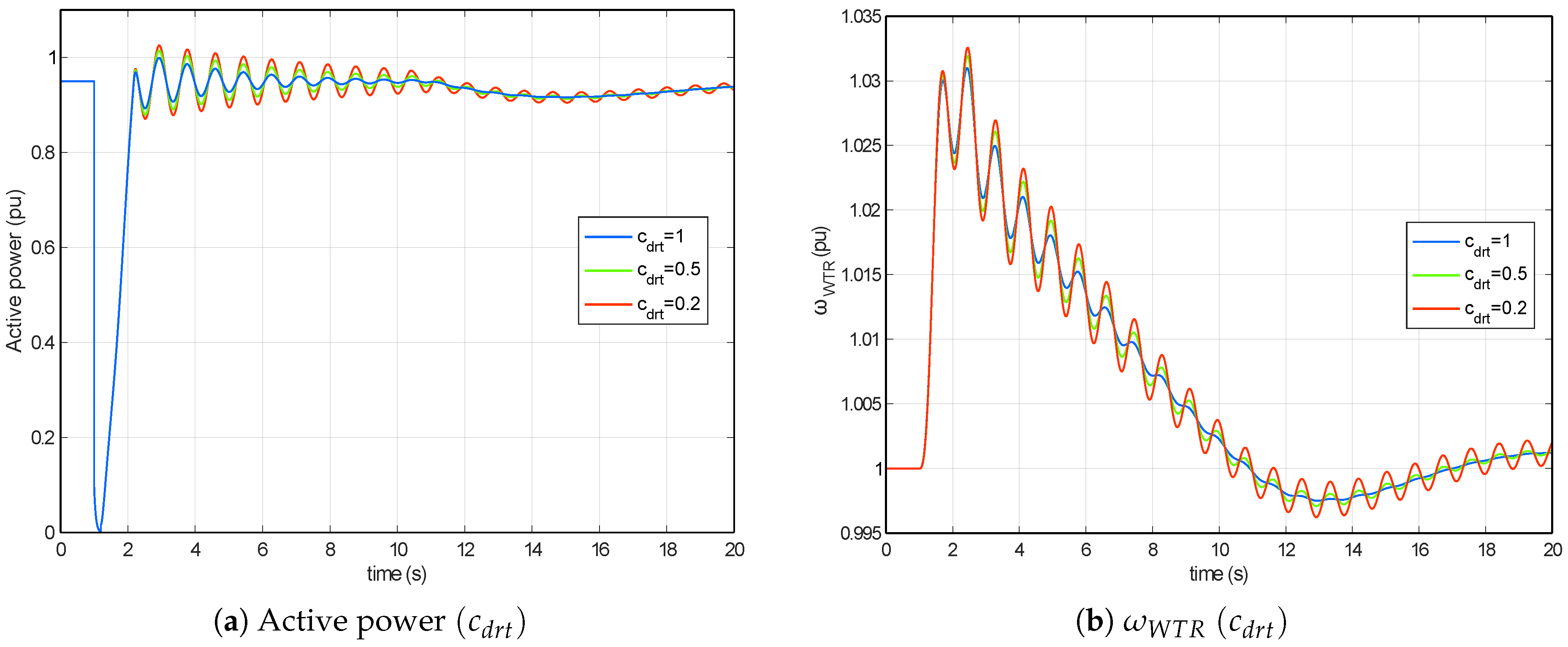
4. Control Parameter Analysis under Voltage Dips of the Type 3 WT Model
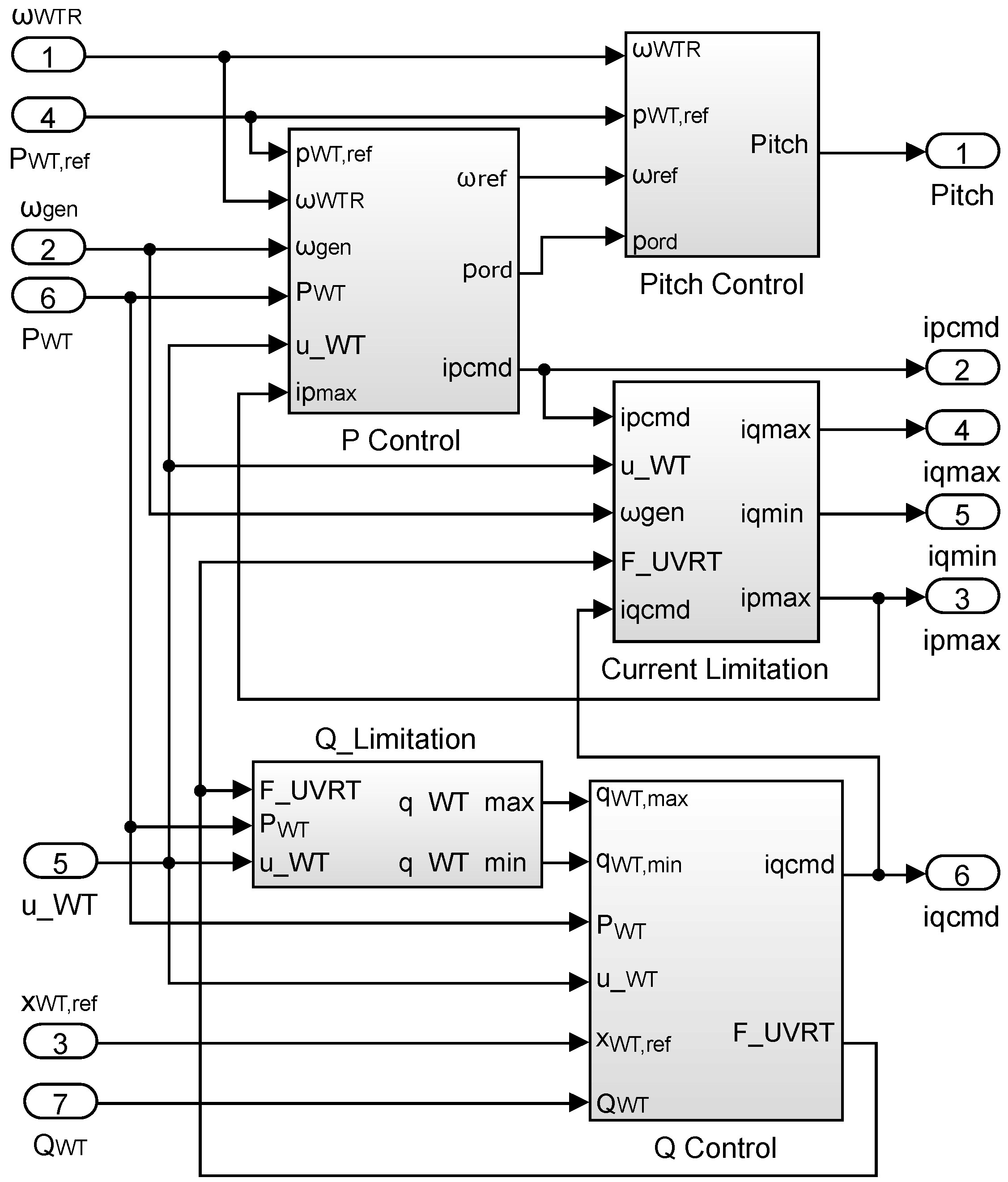
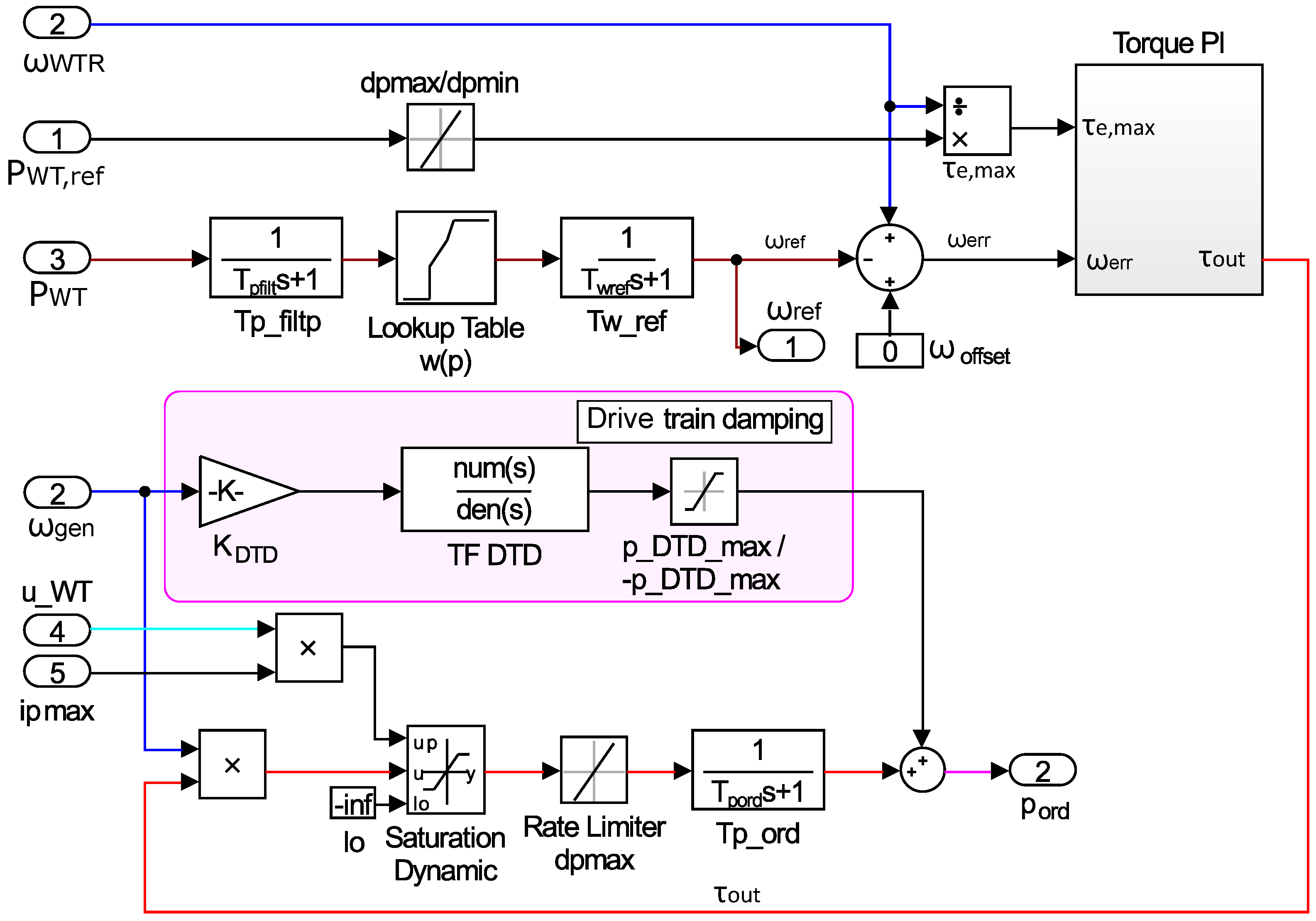
4.1. Active Power Control Model
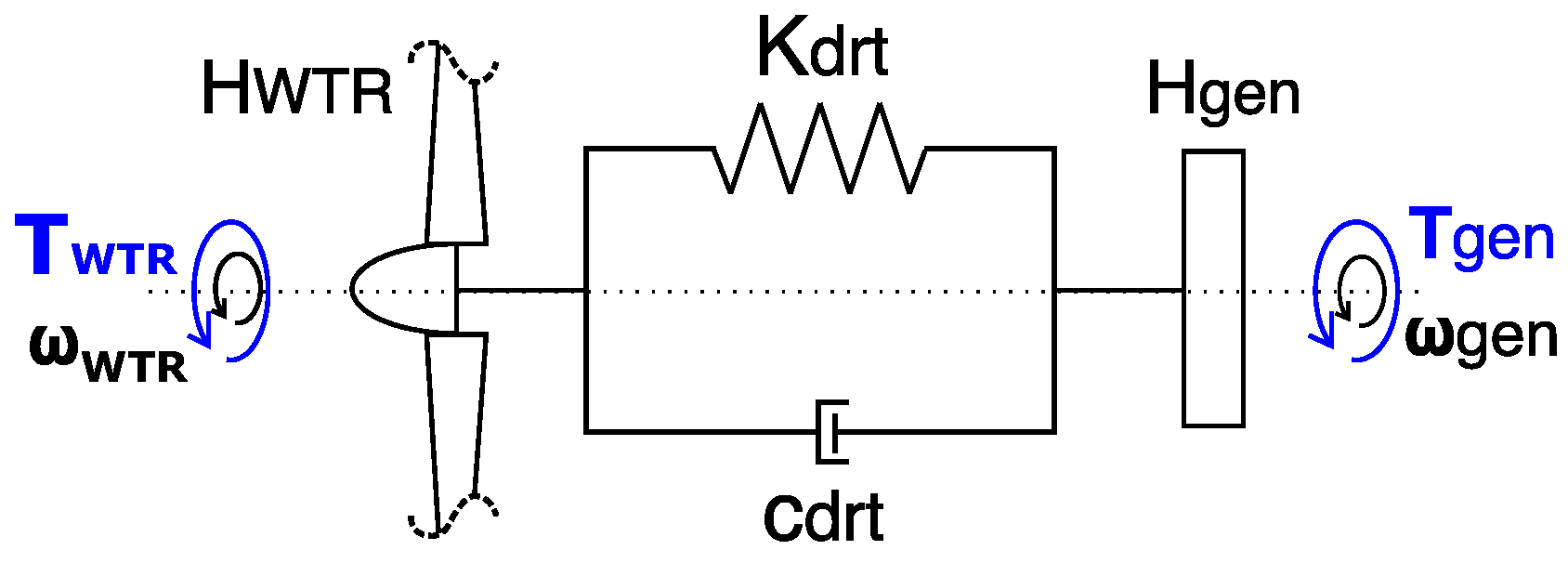
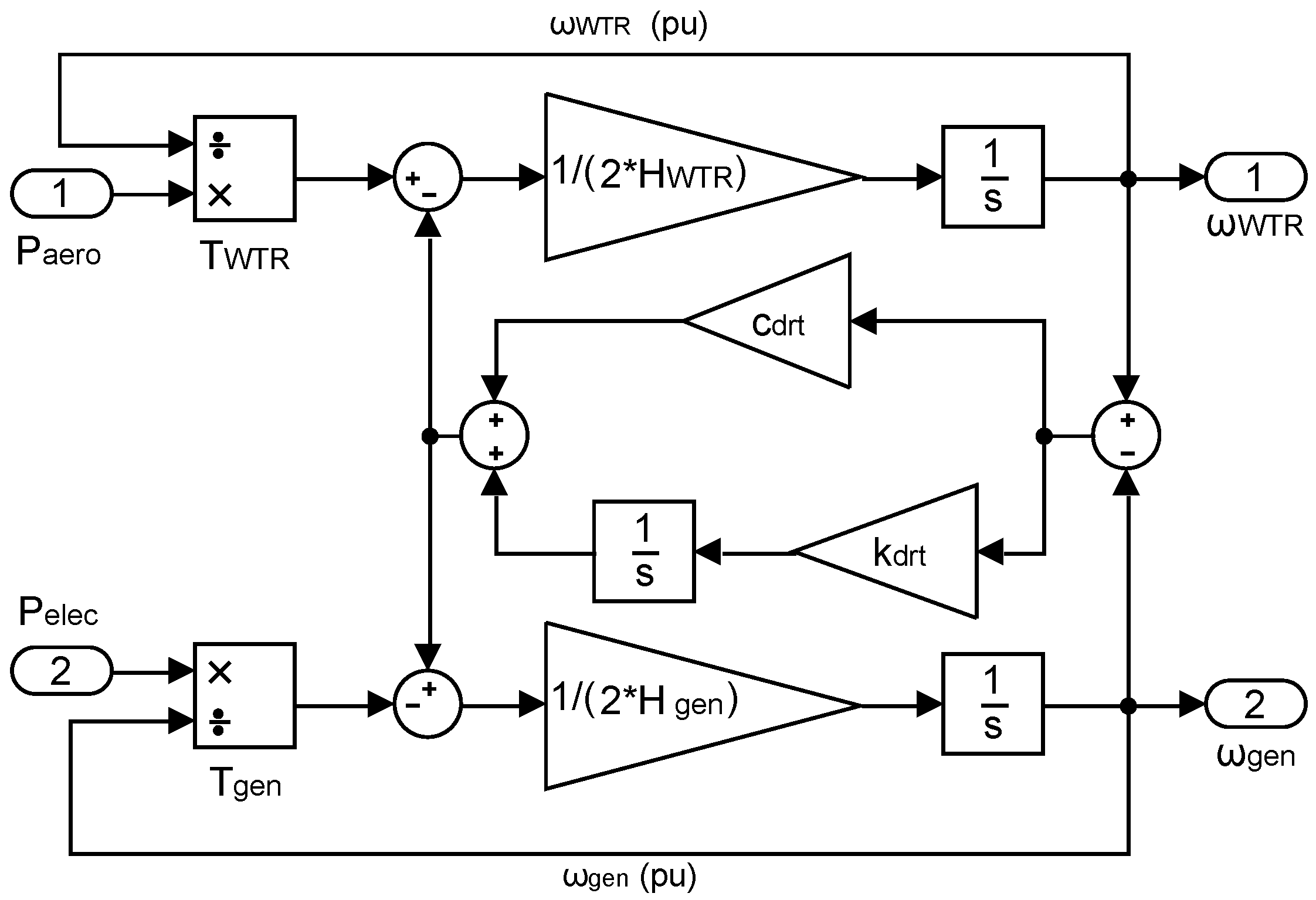
- and : rotational speed values from the two mass model discussed in Section 3.
- : active power reference to be injected into the grid by the WT (manually adjusted).
- : active power obtained from the electrical generator system.
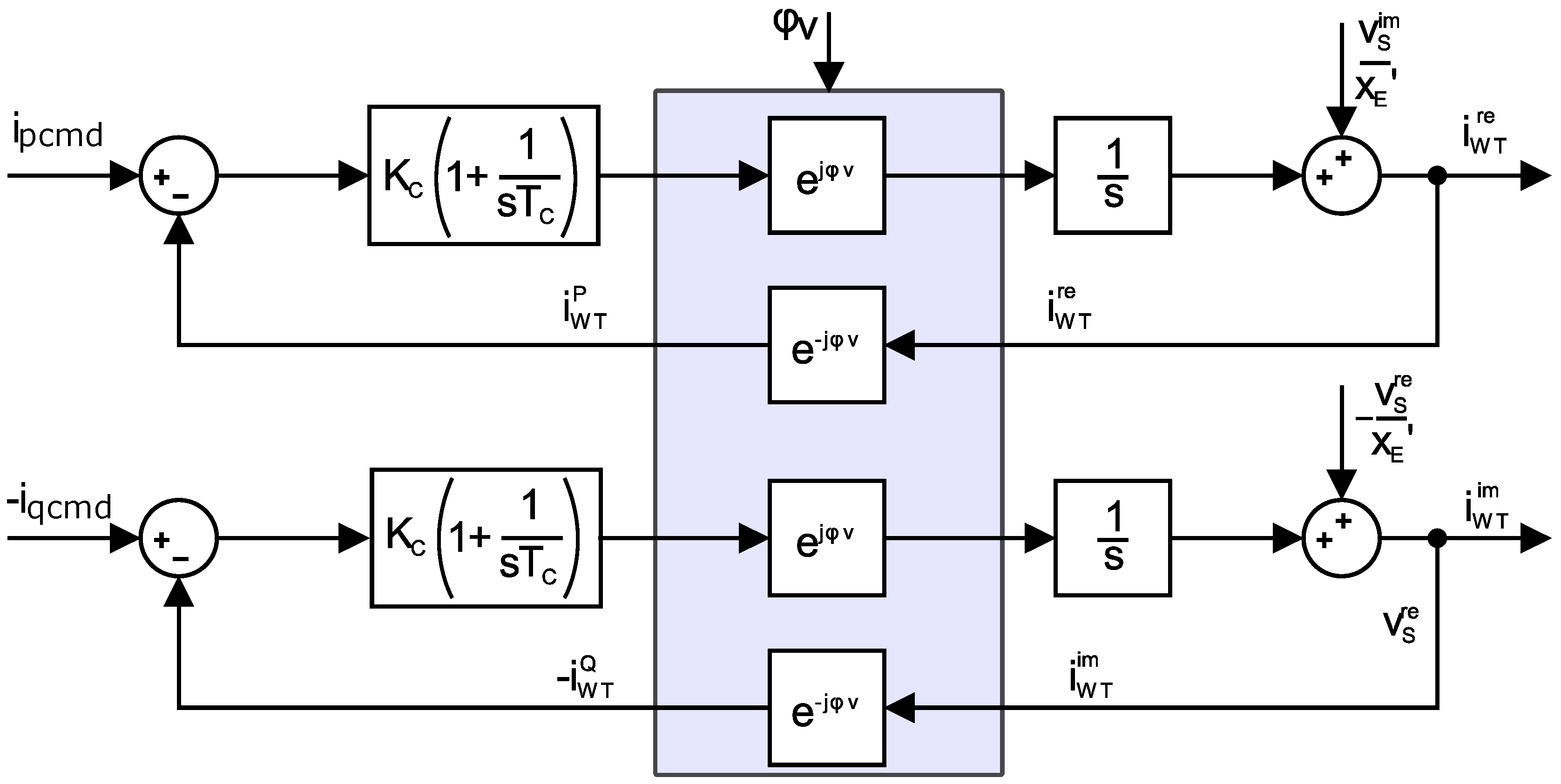
- : voltage reference from the electrical generator system.
- : maximum active current able to be injected into the grid by the WT as determined by the current limitation system.
- Zone 1, where the minimum rotational speed has been reached () and consequently cannot decrease further due to component limits, mainly converter maximum slip.
- Zone 2, this operation mode covers the minimum rotational speed () to the rated rotational speed, where the wind turbine operates at its maximum power tracking.
- Zone 3, operation mode maintaining a fixed rated speed () and below the rated active power. In some cases, instead of a fixed rated rotational speed, there is a linear rotational speed variation to achieve the rated rotational speed at the rated active power [35].
- Zone 4, this last operation mode is set at the rated rotational speed () and the rated active power. Dotted lines included in Figure 13a imply that, under simulation conditions, the active power reference presents a certain slope, simplifying the model and offering more stable simulations; although under real control conditions, this look-up table has the two vertical lines originally indicated.
- A ramp with a constant slope defined by the parameter . This ramp function is only used under voltage dip conditions.
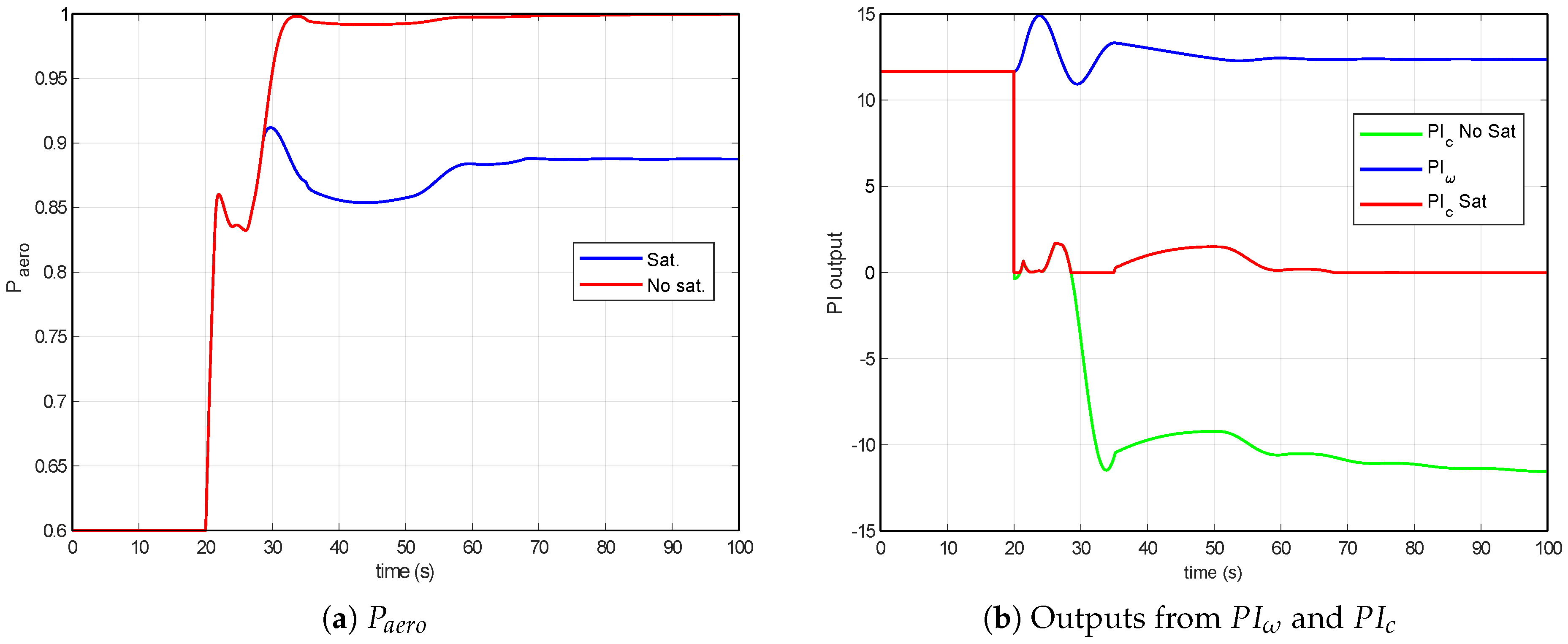
- The torque output filtered by an integral controller with a constant estimated as .
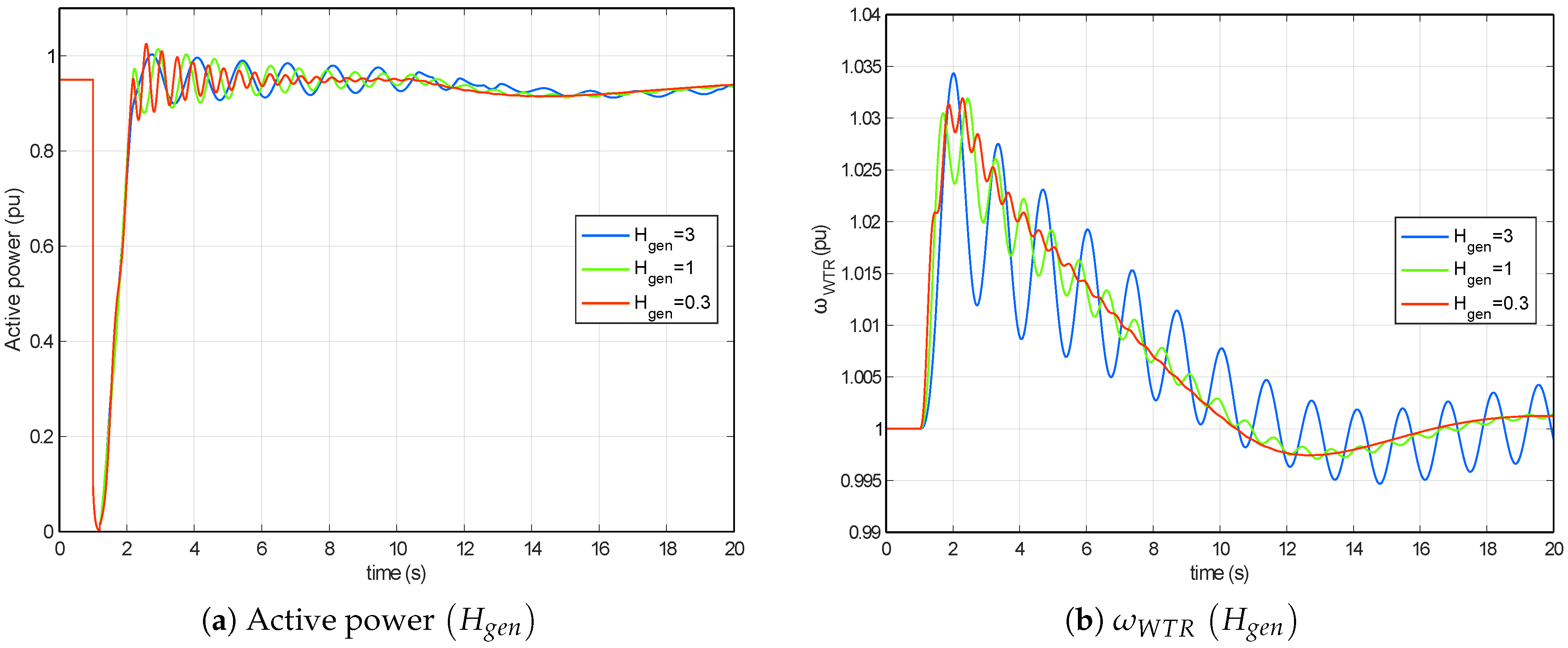
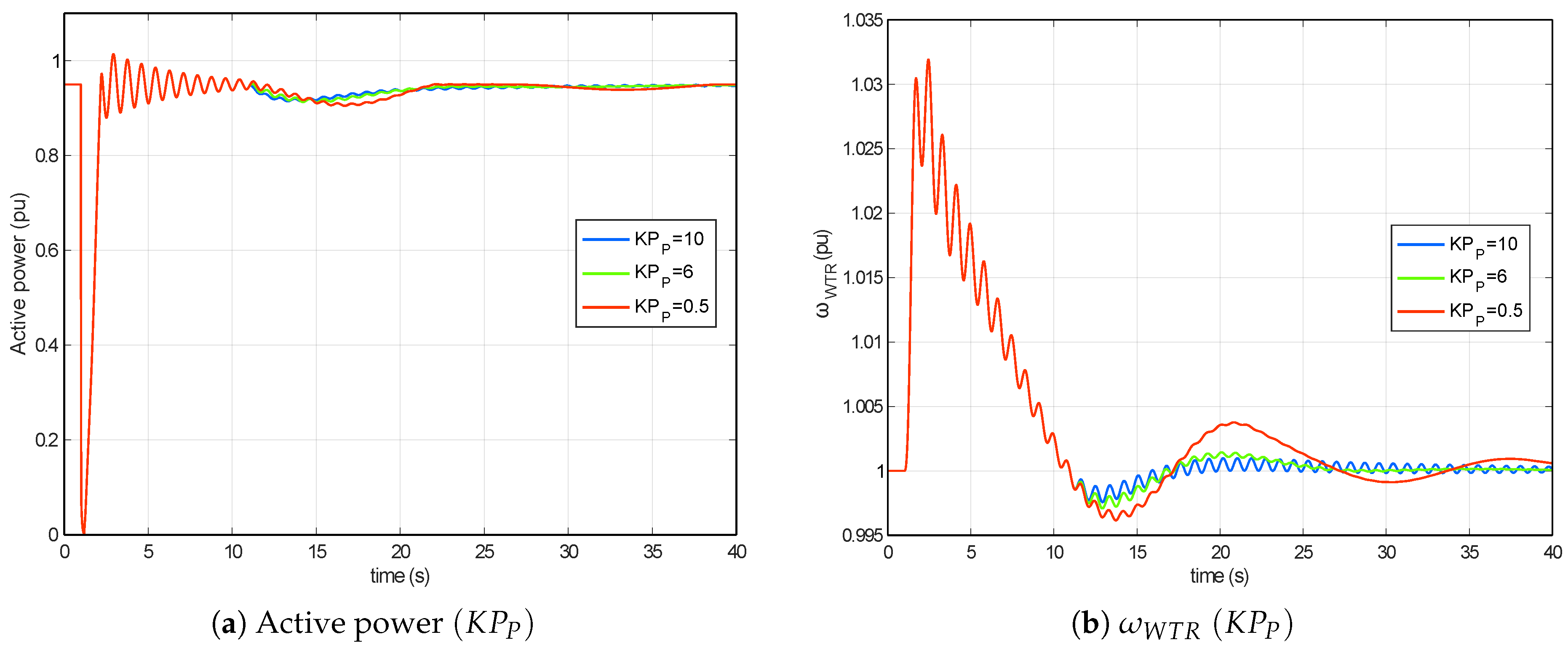
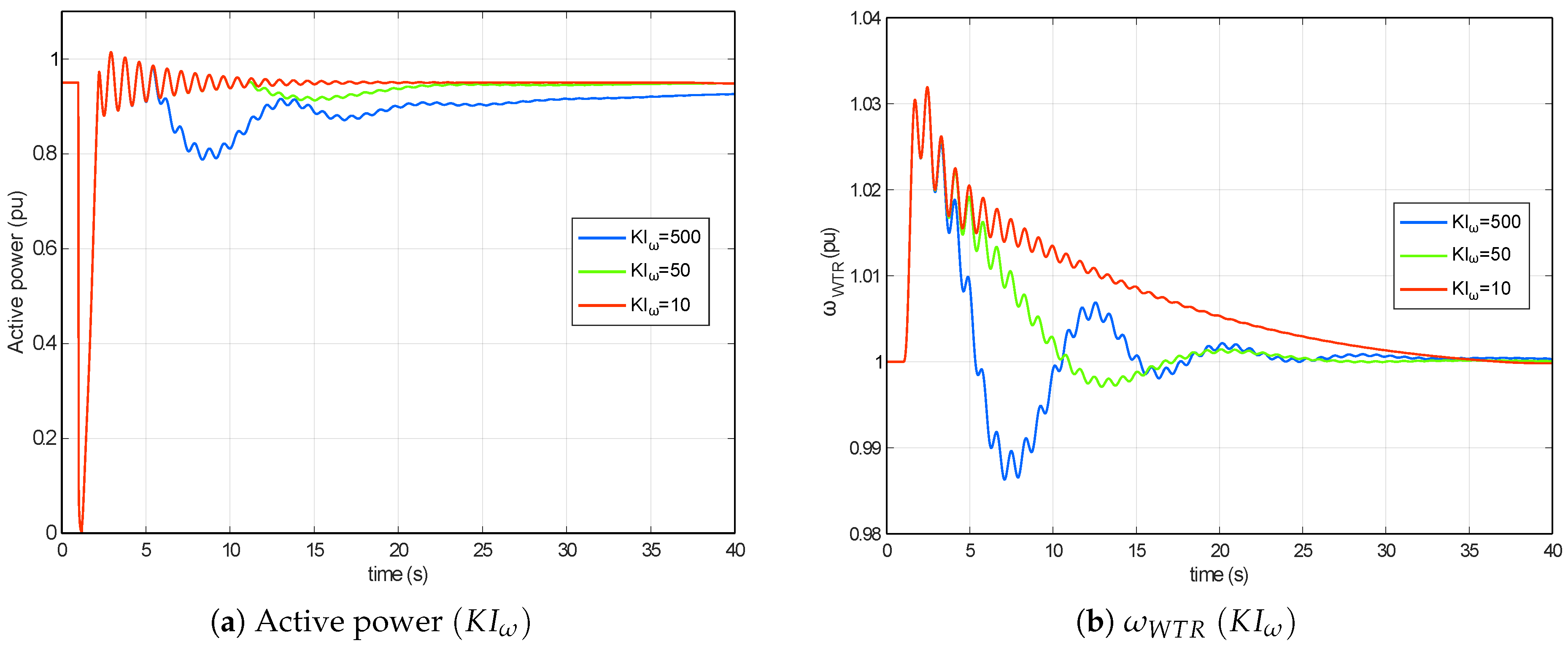
- The oscillation amplitude is larger since is significantly higher than , and thus, the system may become unstable.
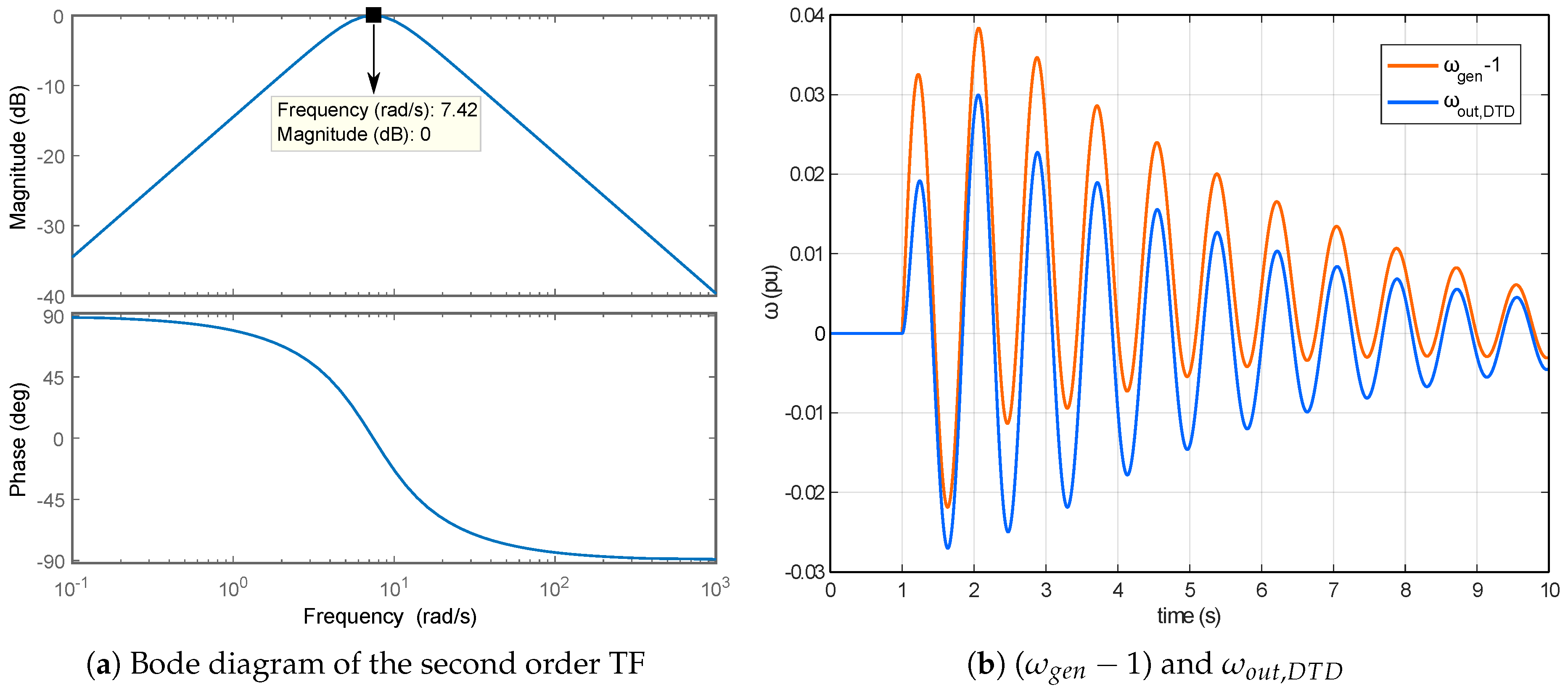
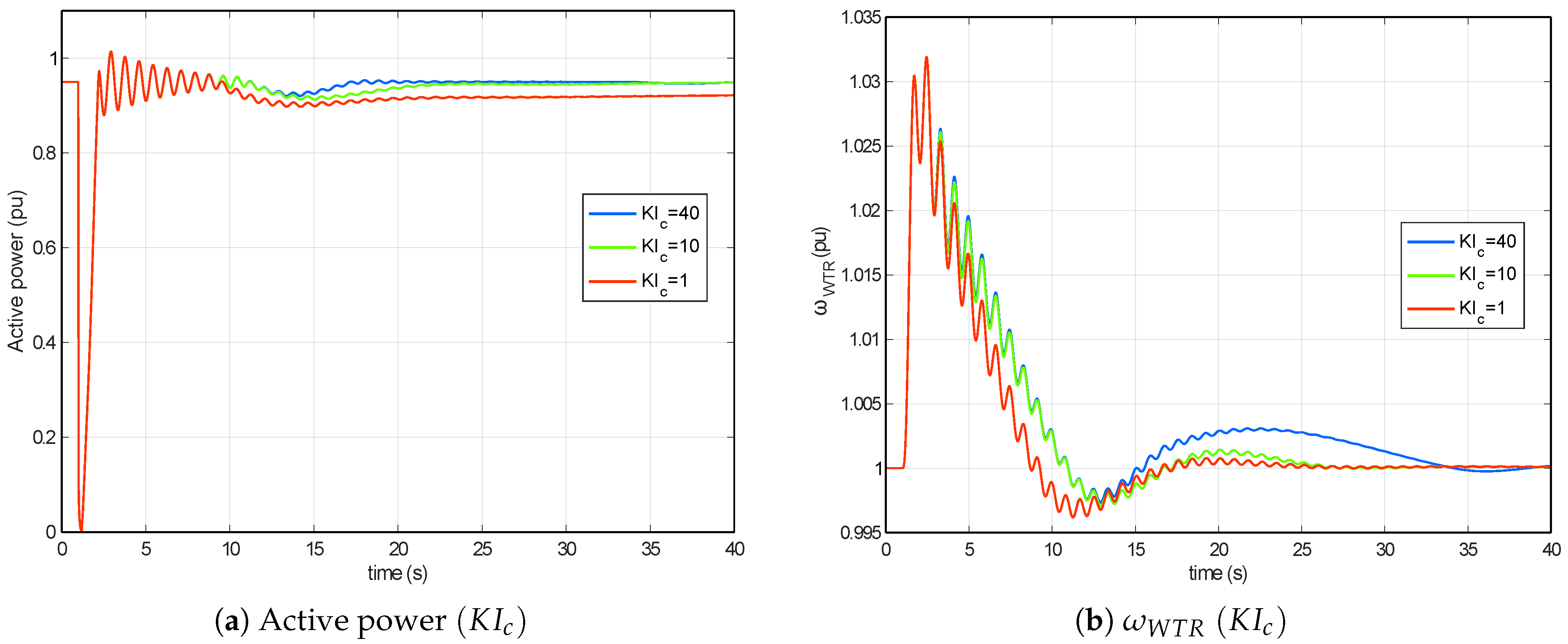
- The drive train oscillation is delayed by the filter, which models the converter time response. The addition of this phase to the system means the drive train damping is less efficient than if the drive train damper function injects after .
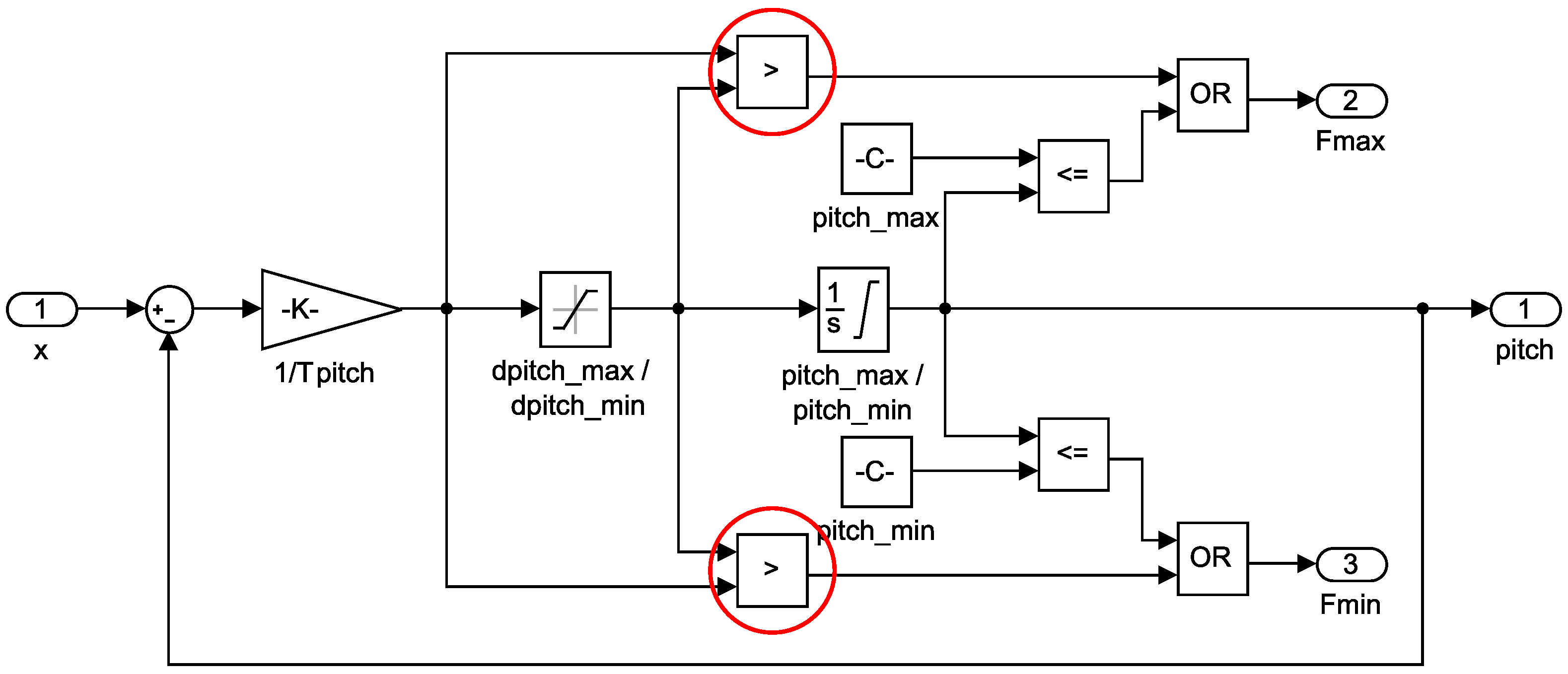
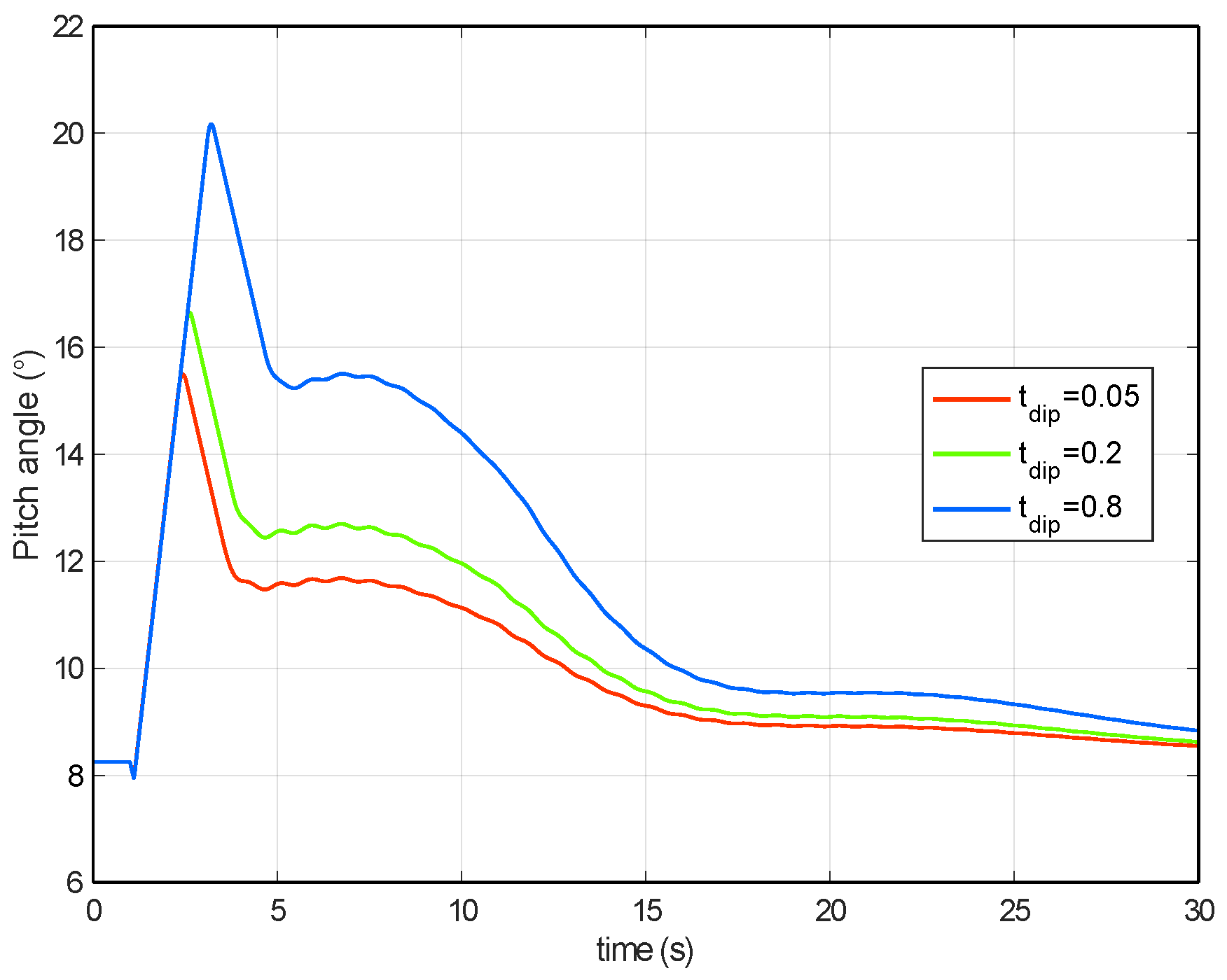
4.2. Pitch Control Model
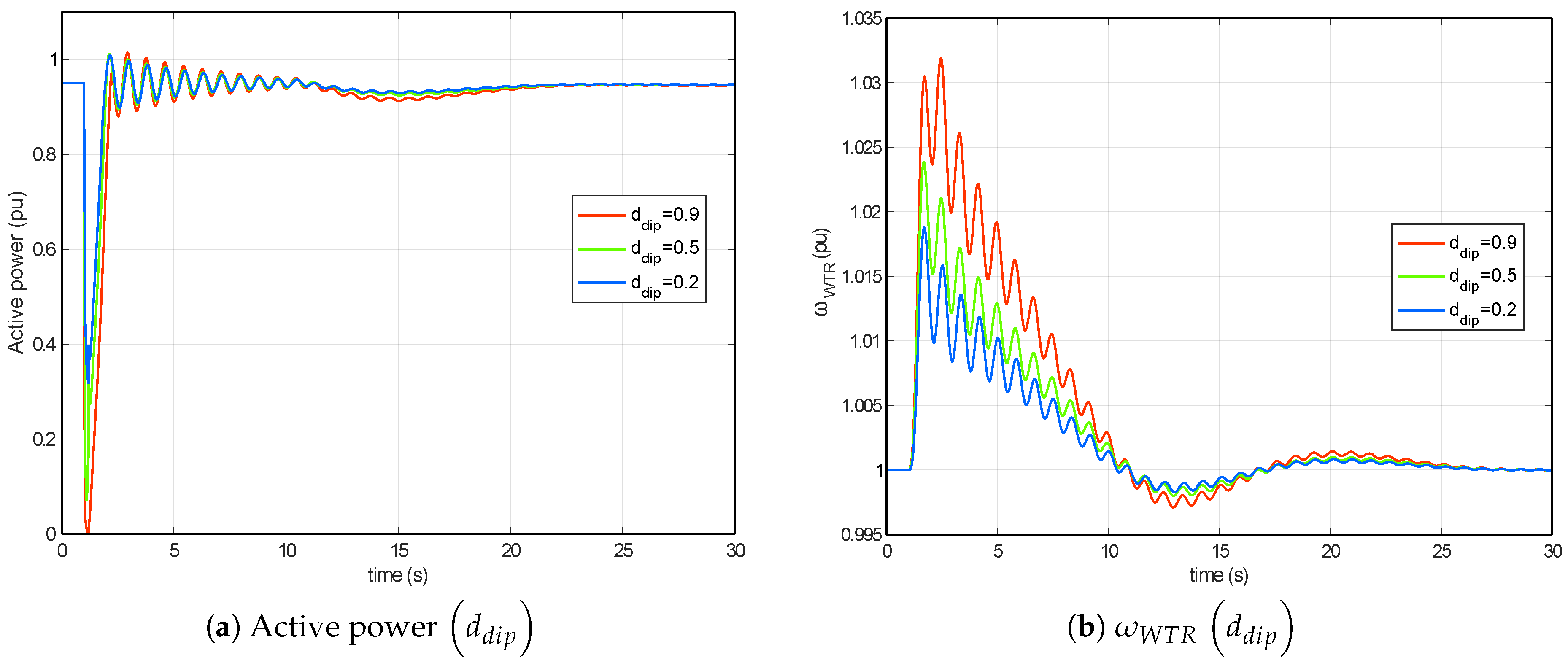
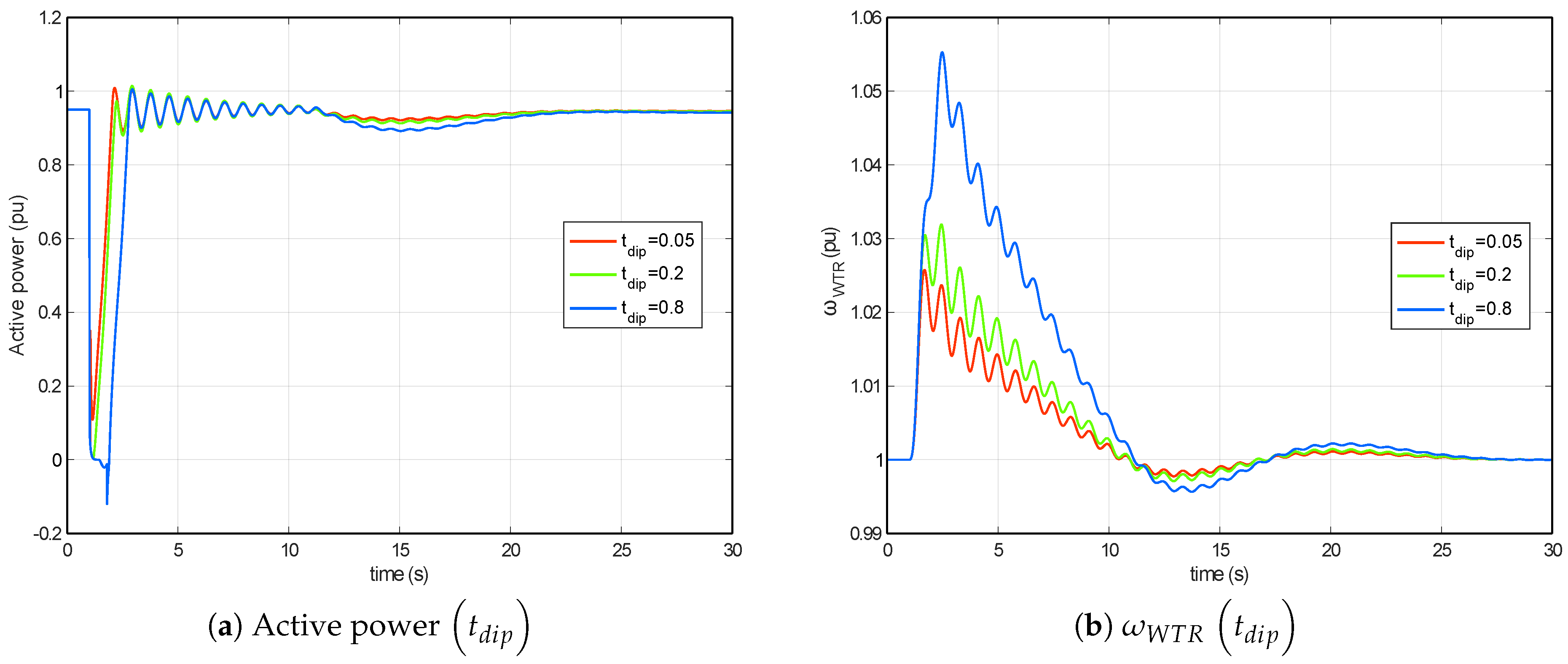
5. Influence of Voltage Dip Characteristics: Depth and Duration
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| DFIG | Doubly-Fed Induction Generator |
| DSO | Distribution System Operator |
| DTD | Drive Train Damping |
| EMT | Electro-Magnetic Transient |
| EU | European Union |
| FRT | Fault Ride-Through |
| FSC | Full-Scale Converter |
| GSC | Grid-Side Converter |
| IEA | International Energy Agency |
| IEC | International Electrotechnical Commission |
| PV | Solar Photovoltaics |
| rms | root mean square |
| RSC | Rotor-Side Converter |
| TF | Transfer Function |
| TSO | Transmission System Operator |
| WECC | Western Electricity Coordinating Council |
| WT | Wind Turbine |
References
- Amin, A. REmap: Roadmap for a Renewable Energy Future; Technical Report; International Renewable Energy Agency (IRENA): Abu Dhabi, UAE, 2016. [Google Scholar]
- Mueller, S. Next Generation Wind and Solar Power; Technical Report; International Energy Agency (IEA): Paris, France, 2016.
- Philibert, C.; Holttinen, H. Technology Roadmap Wind Energy; Technical Report; International Energy Agency (IEA): Paris, France, 2013.
- Honrubia-Escribano, A.; Jiménez-Buendía, F.; Molina-García, A.; Fuentes-Moreno, J.; Muljadi, E.; Gómez-Lázaro, E. Analysis of Wind Turbine Simulation Models: Assessment of Simplified versus Complete Methodologies. In Proceedings of the XVII International Symposium on Electromagnetic Fields in Mechatronics, Electrical and Electronic Engineering, Valencia, Spain, 10–12 September 2015; p. 8. [Google Scholar]
- Honrubia Escribano, A.; Gomez-Lazaro, E.; Fortmann, J.; Sørensen, P.; Martín-Martínez, S. Generic dynamic wind turbine models for power system stability analysis: A comprehensive review. Renew. Sustain. Energy Rev. 2017, in press. [Google Scholar] [CrossRef]
- Liu, Y.J.; Chen, P.A.; Lan, P.H.; Chang, Y.T. Dynamic simulation and analysis of connecting a 5 MW wind turbine to the distribution system feeder that serves to a wind turbine testing site. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017-ECCE Asia), Kaohsiung, Taiwan, 3–7 June 2017; pp. 2031–2035. [Google Scholar]
- Asmine, M.; Brochu, J.; Fortmann, J.; Gagnon, R.; Kazachkov, Y.; Langlois, C.E.; Larose, C.; Muljadi, E.; MacDowell, J.; Pourbeik, P.; et al. Model Validation for Wind Turbine Generator Models. IEEE Trans. Power Syst. 2011, 26, 1769–1782. [Google Scholar] [CrossRef]
- Fortmann, J.; Engelhardt, S.; Kretschmann, J.; Feltes, C.; Erlich, I. New Generic Model of DFG-Based Wind Turbines for RMS-Type Simulation. IEEE Trans. Energy Convers. 2014, 29, 110–118. [Google Scholar] [CrossRef]
- International Electrotechnical Commission. IEC 61400-27-1: Electrical Simulation Models for Wind Power Generation—Wind Turbines; International Electrotechnical Commission: Geneva, Switzerland, 2015. [Google Scholar]
- Villena-Ruiz, R.; Lorenzo-Bonache, A.; Honrubia-Escribano, A.; Gómez-Lázaro, E. Implementation of a generic Type 1 wind turbine generator for power system stability studies. In Proceedings of the International Conference on Renewable Energies and Power Quality, Malaga, Spain, 4–6 April 2017. [Google Scholar]
- Das, K.; Hansen, A.; Sørensen, P. Understanding IEC standard wind turbine models using SimPowerSystems. Wind Eng. 2016, 40, 212–227. [Google Scholar] [CrossRef] [Green Version]
- Sørensen, P. IEC 61400-27. Electrical Simulation Models for Wind Power Generation; European Energy Research Alliance (EERA): Brussels, Belgium, 2012. [Google Scholar]
- Honrubia-Escribano, A.; Gómez-Lázaro, E.; Jiménez-Buendía, F.; Muljadi, E. Comparison of Standard Wind Turbine Models with Vendor Models for Power System Stability Analysis. In Proceedings of the 15th International Workshop on Large-Scale Integration of Wind Power into Power Systems as well as on Transmission Networks for Offshore Wind Power Plants, Vienna, Austria, 15–17 November 2016. [Google Scholar]
- Göksu, O.; Altin, M.; Fortmann, J.; Sorensen, P. Field Validation of IEC 61400-27-1 Wind Generation Type 3 Model with Plant Power Factor Controller. IEEE Trans. Energy Convers. 2016, 31, 1170–1178. [Google Scholar] [CrossRef]
- Honrubia Escribano, A.; Gómez-Lázaro, E.; Vigueras-Rodríguez, A.; Molina-García, A.; Fuentes, J.A.; Muljadi, E. Assessment of DFIG simplified model parameters using field test data. In Proceedings of the IEEE Symposium on Power Electronics & Machines for Wind Application, Denver, CO, USA, 16–18 July 2012; pp. 1–7. [Google Scholar]
- Sørensen, P.; Andersen, B.; Bech, J.; Fortmann, J.; Pourbeik, P. Progress in IEC 61400-27. Electrical Simulation Models for Wind Power Generation. In Proceedings of the 11th International Workshop on Large-Scale Integration of Wind Power into Power Systems as well as on Transmission Networks for Offshore Wind Power Plants, Lisbon, Portugal, 13–15 November 2012; p. 7. [Google Scholar]
- Bech, J. Siemens Experience with Validation of Different Types of Wind Turbine Models. In Proceedings of the IEEE Power and Energy Society General Meeting, Washington, DC, USA, 27–31 July 2014. [Google Scholar]
- Jiménez Buendía, F.; Barrasa Gordo, B. Generic Simplified Simulation Model for DFIG with Active Crowbar. In Proceedings of the 11th International Workshop on Large-Scale Integration of Wind Power into Power Systems as well as on Transmission Networks for Offshore Wind Power Plants, Lisbon, Portugal, 13–15 November 2012; p. 6. [Google Scholar]
- Honrubia-Escribano, A.; Jiménez-Buendía, F.; Gómez-Lázaro, E.; Fortmann, J. Field Validation of a Standard Type 3 Wind Turbine Model for Power System Stability, According to the Requirements Imposed by IEC 61400-27-1. IEEE Trans. Energy Convers. 2017. [Google Scholar] [CrossRef]
- Zeni, L.; Gevorgian, V.; Wallen, R.; Bech, J.; Sørensen, P.E.; Hesselbæk, B. Utilisation of real-scale renewable energy test facility for validation of generic wind turbine and wind power plant controller models. IET Renew. Power Gener. 2016, 10, 1123–1131. [Google Scholar] [CrossRef]
- Lorenzo-Bonache, A.; Villena-Ruiz, R.; Honrubia-Escribano, A.; Gómez-Lázaro, E. Real time simulation applied to the implementation of generic wind turbine models. In Proceedings of the International Conference on Renewable Energies and Power Quality, Malaga, Spain, 4–6 April 2017. [Google Scholar]
- Honrubia-Escribano, A.; Jiménez-Buendía, F.; Gómez-Lázaro, E.; Fortmann, J. Validation of Generic Models for Variable Speed Operation Wind Turbines Following the Recent Guidelines Issued by IEC 61400-27. Energies 2016, 9, 1048. [Google Scholar] [CrossRef]
- Göksu, O.; Sørensen, P.; Morales, A.; Weigel, S.; Fortmann, J.; Pourbeik, P. Compatibility of IEC 61400-27-1 Ed 1 and WECC 2nd Generation Wind Turbine Models. In Proceedings of the 15th Wind Integration Workshop, Vienna, Austria, 15–17 November 2016. [Google Scholar]
- Hernández, C.V.; Telsnig, T.; Pradas, A.V. JRC Wind Energy Status Report 2016 Edition; Market, Technology and Regulatory Aspects of Wind Energy; JRC Science for Policy Report; European Commission: Brussels, Belgium, 2017. [Google Scholar]
- Fortmann, J.; Engelhardt, S.; Kretschmann, J.; Janben, M.; Neumann, T.; Erlich, I. Generic Simulation Model for DFIG and Full Size Converter based Wind Turbines. In Proceedings of the 9th International Workshop on Large-Scale Integration of Wind Power into Power Systems as well as on Transmission Networks for Offshore Wind Plants, Quebec, QC, Canada, 18–19 October 2010; p. 8. [Google Scholar]
- Lorenzo-Bonache, A.; Villena-Ruiz, R.; Honrubia-Escribano, A.; Gómez-Lázaro, E. Comparison of a Standard Type 3B WT Model with a Commercial Build-in Model. In Proceedings of the IEEE International Electric Machines & Drives Conference, Miami, FL, USA, 21–24 May 2017. [Google Scholar]
- Subramanian, C.; Casadei, D.; Tani, A.; Sorensen, P.; Blaabjerg, F.; McKeever, P. Implementation of Electrical Simulation Model for IEC Standard Type-3A Generator. In Proceedings of the 2013 European Modelling Symposium (EMS), Manchester, UK, 20–22 November 2013; pp. 426–431. [Google Scholar]
- European Commission. EU 2016/631 of 14 April 2016 Establishing a Network Code on Requirements for Grid Connection of Generators; European Commission: Brussels, Belgium, 2016. [Google Scholar]
- Morales, A.; Robe, X.; Maun, J.C. Wind Turbine Generator Systems. Part 21. Measurement and Assessment of Power Quality Characteristics of Grid Connected Wind Turbines; IEC/CEI: Geneva, Switzerland, 2001. [Google Scholar]
- Muyeen, S.; Ali, M.; Takahashi, R.; Murata, T.; Tamura, J.; Tomaki, Y.; Sakahara, A.; Sasano, E. Comparative study on transient stability analysis of wind turbine generator system using different drive train models. IET Renew. Power Gener. 2007, 1, 131–141. [Google Scholar] [CrossRef]
- Perdana, A. Dynamic Models of Wind Turbines. A Contribution towards the Establishment of Standardized Models of Wind Turbines for Power System Stability Studies. Ph.D. Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2008. [Google Scholar]
- Fortmann, J. Modeling of Wind Turbines with Doubly Fed Generator System. Ph.D. Thesis, Department for Electrical Power Systems, University of Duisburg-Essen, Duisburg, Germany, 2014. [Google Scholar]
- Behnke, M.; Ellis, A.; Kazachkov, Y.; McCoy, T.; Muljadi, E.; Price, W.; Sanchez-Gasca, J. Development and validation of WECC variable speed wind turbine dynamic models for grid integration studies. In Proceedings of the AWEA Wind Power Conference, Los Angeles, CA, USA, 4–7 June 2007; pp. 1–5. [Google Scholar]
- Burton, T.; Sharpe, D.; Jenkins, N.; Bossanyi, E. Wind Energy Handbook; John Wiley & Sons: Hoboken, NJ, USA, 2001; p. 642. [Google Scholar]
- Bossanyi, E.A. The Design of Closed Loop Controllers for Wind Turbines. Wind Energy 2000, 3, 149–163. [Google Scholar] [CrossRef]
- Wright, A.D.; Fingersh, L.J. Advanced Control Design for Wind Turbines. Part I: Control Design, Implementation, and Initial Tests; Technical Report; NREL: Golden, CO, USA, 2008.
- Lorenzo-Bonache, A.; Villena-Ruiz, R.; Honrubia-Escribano, A.; Gómez-Lázaro, E. Operation of Active and Reactive Control Systems of a Generic Type 3 WT Model. In Proceedings of the IEEE International Conference on Compatibility, Power Electronics and Power Engineering, Cadiz, Spain, 4–6 April 2017. [Google Scholar]
- Lin, L.; Zhang, J.; Yang, Y. Comparison of Pitch Angle Control Models of Wind Farm for Power System Analysis. In Proceedings of the IEEE Power Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–7. [Google Scholar]
- Muljadi, E.; Butterfield, C.P. Pitch-controlled variable-speed wind turbine generation. IEEE Trans. Ind. Appl. 2001, 37, 240–246. [Google Scholar] [CrossRef]
- Institute of Electrical and Electronics Engineers (IEEE). 1564-2014—IEEE Guide for Voltage Sag Indices; IEEE: New York, NY, USA, 2014; pp. 1–59. [Google Scholar]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Parameter | Ref. Value | Var.Range |
|---|---|---|---|
| Two mass model | -Inertia constant of WT rotor (s) | 10 | |
| -Inertia constant of generator (s) | 1 | ||
| -Drive train stiffness (pu) | 100 | ||
| -Drive train damping (pu) | 0.5 | ||
| Active power control | -PI controller proportional gain | 6 | |
| -PI controller integration parameter | 3 | ||
| -Gain for active drive train damping | 0.5 | ||
| Pitch control | -Speed PI controller integration gain | 50 | |
| -Speed PI controller proportional gain | 200 | - | |
| -Power PI controller integration gain | 10 | ||
| -Power PI controller proportional gain | 10 | - | |
| -Pitch cross coupling gain | 0 |
| Parameter | Original Value | Variation Range |
|---|---|---|
| Depth | ||
| Duration | 0.2 s |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lorenzo-Bonache, A.; Honrubia-Escribano, A.; Jiménez-Buendía, F.; Molina-García, Á.; Gómez-Lázaro, E. Generic Type 3 Wind Turbine Model Based on IEC 61400-27-1: Parameter Analysis and Transient Response under Voltage Dips. Energies 2017, 10, 1441. https://doi.org/10.3390/en10091441
Lorenzo-Bonache A, Honrubia-Escribano A, Jiménez-Buendía F, Molina-García Á, Gómez-Lázaro E. Generic Type 3 Wind Turbine Model Based on IEC 61400-27-1: Parameter Analysis and Transient Response under Voltage Dips. Energies. 2017; 10(9):1441. https://doi.org/10.3390/en10091441
Chicago/Turabian StyleLorenzo-Bonache, Alberto, Andrés Honrubia-Escribano, Francisco Jiménez-Buendía, Ángel Molina-García, and Emilio Gómez-Lázaro. 2017. "Generic Type 3 Wind Turbine Model Based on IEC 61400-27-1: Parameter Analysis and Transient Response under Voltage Dips" Energies 10, no. 9: 1441. https://doi.org/10.3390/en10091441